
Abstract
Existing pedestrian facilities are evaluated using a range of Pedestrian Level of Service (PLOS) assessment models. These models, available for well-defined facilities, consider factors like pedestrian volume and speed, physical infrastructure conditions and perceived satisfaction levels for comfort, safety and security of the facility. The satisfaction level, usually assessed using sample satisfaction survey, is subjective. No comprehensive PLOS assessment model conceptualized in this work is available for old cities having mixed land-use where well-defined pedestrian facilities might not have usually existed. This study eventually identifies relevant PLOS assessment factors for mixed land-use urban areas from literary narratives/previous research works and develops a comprehensive PLOS assessment model for them considering all these factors. The factors were initially grouped into factor groups or parameters using principal component analysis done with importance survey responses from 550 pedestrians from Patna and Gaya, two old cities of India. Six important parameters have been identified namely safety issues under pedestrian traffic interaction; condition of pedestrian infrastructure; pedestrian convenience and sense of security; night time walking; encroachment and walking comfort. The model considers pedestrians’ satisfaction for the parameters which is a function of actual conditions for the underlying factors and varies from person to person. To eliminate variability, the study develops pedestrian satisfaction rating models for each parameter through satisfaction survey, correlating existing pedestrian facility condition to perceived satisfaction level, using ordered probit model. Random conditions for each parameter was designed through D-Optimal experimental design considering four levels (best to worst) of factor conditions and survey was done with 780 participants, each participating in 16 experiments.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Background
Walking forms an integral mode of travel for short distance commuting and for accessing public transport modes. The importance and health benefits of walking in day to day lives of people is well recognized. Proper walking infrastructure and continuous evaluation of the same is essential in cities to enable people to walk safely and comfortably. A wide range of literature is available focusing on assessment of Pedestrian Level of Service (PLOS) for walking infrastructure facilities (Fruin 1971; Khisty 1994; Kadali and Vedagiri 2015; Majumdar and Mitra 2018; Bivina and Parida 2019). Level of service (LOS) of any traffic facility is assessed based on vehicle flow operations considering speed, flow and capacity. Initially, the traffic engineers assessed PLOS using methods similar to LOS assessment methods for traffic facilities i.e. based on pedestrian flow volumes and capacity of the pedestrian facility (Furin 1971; Mori and Tsukaguchi 1987). However, equating human and vehicular flow, without considering qualitative aspects, may not provide a proper assessment of the facility. To resolve this issue, researchers tried to integrate destination accessibility and distance in PLOS assessment framework (Ewing et al. 2013). Further, researchers have used other quantitative factors such as footpath width, shoulder width, buffer zone width and presence of on-street parking for PLOS assessment. Inclusion of qualitative factors to assess level of service offered by pedestrian facilities marked an important advancement in the field of PLOS assessment (Sarkar 1993; Khisty 1994; Parida and Parida 2007). The qualitative factors considered in PLOS assessment included quality of footpath surface, convenience of footpath usage in terms of availability of ramps for accessing elevated footpaths, shades for pedestrians, night time lighting etc. and sense of safety and security perceived by pedestrians. However, each of these factors may influence PLOS in a different way. For example, encroachments like presence of street vendors, although a hindrance for walking, may enhance a sense of security and provide easy shopping options for pedestrians. Thus, different types of encroachment also affect PLOS perception differently and the effect of different types of encroachments has not been studied so far. Table 1 gives a detailed account of both qualitative and quantitative factors, each of which act as either encouragement factor or discouragement factor for walking, considered for PLOS assessment so far in the past works.
Some recent research works considered land-use type for LOS assessment considering land-use type as a categorical variable in the nominal scale (Kadali and Vedagiri 2016; Majumder and Mitra 2018). Land-use type was found to be a variable which significantly affects LOS of pedestrian and bicycle infrastructure facilities (Rani et al. 2018; Majumdar & Mitra 2018). However, the positive or negative effect of a particular land-use type on LOS may not indicate that changing the land-use type will essentially change the LOS of a facility. Also, it may not be feasible to change land-use type with policy interventions for improving LOS of the facility. Land-use in terms of population per unit area or commercial activity per unit area may be a better indicator for predicting LOS. Thus, development of separate PLOS models for different land-use (Indo-HCM 2017; Bivina and Parida 2018) may be a better approach.
Many PLOS assessment models exist for sidewalks and crosswalks and their applications and limitations had been discussed in detail by Kadali and Vedagiri (2015). Lack of consensus in the PLOS assessment outcome for different available PLOS models was discussed by Karatas and Tuydes-Yaman (2018). Also, no single PLOS model systematically consider the contribution of all the factors in deciding the LOS provided by the pedestrian infrastructure. The PLOS assessment models available consider pedestrian perceptions for some factors like safety, security and comfort, but the perceptions are subjective. Research on PLOS assessment so far was focused on the assessment of PLOS for well-defined pedestrian facilities. In some cities footpath is not always available as a well-defined accessible elevated path with proper paver blocks. Sometimes the footpath, though available, may not be in usable condition throughout the stretch due to various reasons like broken footpath surface, presence of waste bins, presence of street vendors or even cars or two-wheelers parked on the footpath. Pedestrians are thus compelled to share vehicle carriageway during walking even when they are not crossing the roads and their safety may be compromised. Limited research focuses on the development of comprehensive PLOS model for such facilities (Kadali and Vedagiri 2016). This work attempts to.
-
1.
Develop comprehensive PLOS assessment model for mixed land-use areas of old cities. For the purpose of this study old city refers to “An urban settlement with narrow roads at many stretches, where proper footpath is not always available, typically built before the advent of motorized vehicles and where scope of widening of road facility for providing proper demarcated footpath is limited. With time, expansions have been made around such settlements with better road infrastructure. The pedestrians encounter a wide range of walking infrastructure conditions from well-defined proper footpaths to inaccessible or no footpath where they are forced to share vehicle carriageway while walking” The PLOS assessment model uses important factor groups or parameters identified using Principal Component Analysis (PCA) of a comprehensive list of relevant factors from literature. Importance survey of factors identified from literature was conducted at Patna and Gaya, India and this data was used for PCA analysis. Patna, located in North East India on the south bank of river Ganges was founded in 490 BCE. The old settlement, which covered an area having length of 14 kms and width of 2.82 kms, grew over years to its current area of 250 km2 (35 km long and 16.18 km wide). Latitude and longitude coordinates of Patna are: 25.612677, 85.158875. The city has mixed land-use and the pedestrian infrastructure availability of the city widely varies from no footpaths to well-defined accessible footpaths. Gaya, located 116 km south of Patna, is surrounded by three rocky hills and was built around sixth century BCE. The city of Gaya is similar to the city of Patna in terms of pedestrian infrastructure and has an area of 84.5 km2. Latitude and longitude coordinates of Gaya are: 24.780010, 84.981827. The proposed PLOS assessment model considers pedestrian satisfaction level for the identified parameters.
-
2.
The scaled satisfaction level or ratings, which depend on the condition of the existing pedestrian infrastructure facility, are random and varies from person to person. Considering the average rating of sample satisfaction perception survey render subjectivity to the PLOS predictions. The study also aims to develop scaled or ordered satisfaction rating prediction models for PLOS assessment parameters using Ordered Probit models. The models relate all possible infrastructure conditions affecting the PLOS factors to satisfaction ratings. All possible infrastructure conditions were obtained through randomised design of experiments.
The next section details the method of selection of important parameters for PLOS assessment. Section Theoretical background–PCA proposes a PLOS assessment model using pedestrians' satisfaction perception of important PLOS parameters identified in Sect. Selection of important PLOS parameters. Section Important parameters for PLOS assessment details the development of satisfaction perception rating prediction models using Ordered Probit model to relate sidewalk condition affecting the PLOS assessment parameters (as illustrated in Table 2) and perceived satisfaction rating. The perceived satisfaction rating survey for each parameter was conducted using a set of randomised conditions. The set of randomised conditions for each parameter was designed through D-Optimal experimental design considering four conditions (best to worst) for underlying factors. The section also presents validation of the satisfaction perception rating models done using 100 random experiments for each model. Section Proposed PLOS model details the illustration and discussion of the proposed PLOS model. Section Modelling perception ratings presents the conclusions of the work.
Selection of important PLOS parameters
The present work aims to develop PLOS assessment model for sidewalks of old cities, having mixed land-use i.e. having residential, commercial or shopping and office activity in the same place. A list of 24 walking encouragement and discouragement factors were identified and elaborated in Table 1. Figure 1 illustrates some of the old city sidewalk conditions (as observed in Patna and Gaya, India) and relates them with the factors detailed in Table 1.

Sidewalk Illustrations from Patna and Gaya, India
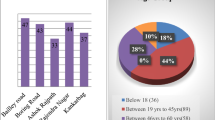
Importance survey for the 24 walking encouragement and discouragement factors identified from literature was conducted in two cities namely Patna and Gaya, India. The survey was conducted by face to face interviews where the surveyors approached the pedestrians on the roadsides and interviewed them. 550 pedestrians were involved in the survey. The pedestrians were asked to rate the importance of each of the 24 factors on a 1 to 5 scale where 1 indicated least important and 5 indicated very important. The factors were explained to the pedestrians in their local language and the surveyors recorded their responses individually. In the survey, the surveyors tried to consider view of pedestrians of all age groups. 17% of the participants were of age less than 19 years; 44% were in the age group of 19 to less than 45 years; 29% were in the age group of 45 to 60 years and 10% were of age more than 60 years. In terms of gender, around 65% were male and 35% were female pedestrians. The sample proportions of different age groups and gender groups were not equal but the sample proportions may be considered as representing the population proportions of pedestrians. PCA was conducted with the importance ratings obtained for the 24 encouragement and discouragement factors to determine the important parameters for PLOS assessment for sidewalks in old cities and their underlying influencing factors. Section Theoretical background–PCA details the theoretical background of PCA. Section Important parameters for PLOS assessment discusses the principal components, which are the PLOS assessment parameters, and their underlying factors which were further used for PLOS model development.
Theoretical background–PCA
PCA reduces dimensionality of data while retaining maximum information. Dimensionality is reduced by finding ‘s’ uncorrelated or orthogonal components called principal components from ‘r’ variables. Here ‘s’ is much smaller than ‘r’ and the variables are measured n times as vector X. PCA successively maximises the variance for the data and obtains ‘r’ linear combinations, \({a}_{i}^{T}\) X called principal components. The [ai] vectors are eigenvectors of the covariance matrix corresponding to ‘r’ largest eigenvalues. Eigenvalue indicates the relative importance of each factor in accounting for the particular set of variables being analysed. PCA for 24 identified factors was done using IBM SPSS 16 to obtain the important parameters and their underlying factors for PLOS assessment. Scale reliability of the data was tested with Cronbach's alpha value which defines the internal consistency that is, how closely related a set of items are as a group. Data suitability for factor loading and sampling adequacy for each variable were tested using Kaiser–Meyer–Olkin (KMO) Test.
Important parameters for PLOS assessment
Six principal components or important parameters were obtained from PCA conducted with importance survey data of 24 walking encouragement and discouragement factors. It could be observed that all the 24 factors were clustered in the six principal components. The six important parameters identified for PLOS assessment were safety issues under pedestrian traffic interaction (PTI), availability and condition of pedestrian infrastructure (PI), pedestrian convenience and sense of security (CS), night time walking (NW), encroachment on footpath (EN) and pedestrian walking comfort (PC). The Cronbach's alpha value was 0.834 which indicates good internal consistency. KMO value of 0.823 indicates that data is adequate for factor loading. Table 2 summarises the important parameters obtained from PCA and their underlying influencing factors.
Proposed PLOS model
The proposed PLOS model indicates the walking condition of sidewalks considering satisfaction perception of pedestrians for all the six important PLOS assessment parameters identified. Initially the overall PLOS score needs to be calculated using perception scores of important PLOS parameters PPTI, PPI, etc. using Eq. 1. The perception scores are perceived satisfaction ratings indicated by pedestrians in 1 to 5 scale, where 1 indicates least satisfactory and 5 indicates extremely satisfactory, of the six important PLOS parameters identified.
\({PLOS}_{score}\) greater than 25 corresponds to PLOS A; 22 –25 corresponds to PLOS B; 18– 21 corresponds to PLOS C; 14 – 17 corresponds to PLOS D; 10– 13 corresponds to PLOS E and below 10 corresponds to PLOS F. Here, PLOS A correspond to best level of service for sidewalks and PLOS F correspond to worst level of service for sidewalks.
Perception ratings are random and depend on sidewalk conditions. Considering average perceptions as scaled perception ratings may lead to subjectivity in PLOS outcome. Therefore, the authors have developed perception rating models for each of the six parameters considering the underlying factors influencing the important PLOS parameters. The next section details the development of perception rating models for the six identified parameters.
Modelling perception ratings
Pedestrians’ perceived satisfaction level pertaining to any of the identified PLOS assessment parameter depends on the underlying factors (detailed in Table 2) of the parameter for the candidate sidewalk. For example, the parameter night time walking (NW) was found to be dependent on three factors namely lighting condition (LN), police patrolling at night (PPN) and availability of CCTV cameras (CCTV). Perception rating of NW will depend on the availability and condition of these factors. The condition of each of the component factors may vary from best to worst, and combination of condition of each component will influence the perception level of the parameter. The condition of each of the component factors of the PLOS parameters are classified in four levels from L1 to L4 where L1 corresponds to the best condition and L4 corresponds to the worst condition. The levels of each component factors were defined and presented in Table 3.
The factors were dummy coded for use in the Ordered Probit Model (Daly et al. 2016). The level 1 of each factor was considered as base level or base variable. For example the dummy coding for LN factor of NW parameter may be written as given in Table 4.
The stated perception ratings of the PLOS assessment parameters were modelled as ordered ratings using Ordered Probit Model. This was done by conducting stated perception rating experiment using randomised combination experiments of combination of different condition levels of component factors. Random combination of different condition levels for each parameter was obtained using Partial Factorial Design. "Design of Randomised Factor Combination Experiment" in Section describes the design of random experiment for obtaining combination of factor conditions. "Modelling Perceptions - Ordered Probit Model" in Section describes the development of perception rating model using Ordered Probit model and "Perception rating models" in Section describes the perception rating model results. "Safety Issues under Pedestrian Traffic Interaction" in Section presents validation of the perception rating models developed.
Design of randomised factor combination experiment
The perception rating experiment for each PLOS assessment parameter was conducted using a combination of levels of each factor using partial D-optimal factorial design. The D-optimality criterion maximises the determinant of the inverse of the variance–covariance matrix in maximum likelihood estimation by minimizing joint confidence sphere around the complete set of estimated model factors. The experimental design software solutions use algorithms to construct D-optimal designs for the smallest possible design that identifies all the necessary combination of factor levels. D-Optimal factorial design for obtaining the main effects of the factors has been widely used in choice modelling experiments (Berger et al. 2000; Kanninen 2002; Jhonson et al. 2013). D-Optimal factorial design of combination levels for satisfaction perception rating experiment of each PLOS assessment parameter was done using IBM SPSS 16. Sixteen combination experiments were obtained from factorial design for each assessment parameter. For example, for assessment parameter NW, one combination experiment may be Lighting Condition as ‘Very Few lights’ or LNL3 (dummy coded as 0 1 0); Police Patrolling at Night as ‘Occasional Patrolling’ or PPNL3 (dummy coded as 0 1 0) and Availability of CCTV cameras as ‘Not Available’ or CCTVL4 (dummy coded as 0 0 1). Satisfaction perception rating survey for the example combination was recorded in 1–5 scale, where 1 indicates not at all satisfactory and 5 indicates very satisfactory.
Satisfaction perception rating survey experiment for sixteen combinations of each of the six PLOS assessment parameters was conducted. 780 participants participated in the survey and each participant was given 16 random experiment combinations to rate each combination on 1–5 scale. Of these 780 participants, 13% were of age less than 19 years; 53% were of age group of 19 to less than 45 years; 22% were in age group of 45 to 60 years and 12% of age more than 60 years. Among the 780 participants, 68% were male and 32% were female. The satisfaction perception rating survey was conducted as roadside interview survey. Section Modelling perceptions–ordered probit model details the development of perception rating model using Ordered Probit model.
Modelling perceptions–ordered probit model
The ordered perceptions for PLOS assessment parameters were modelled using Ordered Probit model which considers the ordered nature of the responses. Ordered Probit model was used for modelling dependent variable \({YP}_{Parameter}\), i.e. perception rating response (recorded in 1–5 scale) as a function of different levels of component factors \(X\), considered as dummy categorical variables, of the PLOS parameter. The model may be specified as shown in Eq. 2.
In the above equation, the β vector is a vector of estimable parameters, and ε is the normally distributed random error (Washington et al. 2011). The perception rating model was calibrated for the PLOS parameter using the perception experiment data using Maximum Likelihood Estimate to obtain β vector and the thresholds \({\mu }_{1}, {\mu }_{2}\&{ \mu }_{3}\). The perception rating for any parameter or combination of factor levels,\({P}_{parameter}\), can be obtained using Eq. 3.
The goodness of fit of the logistic regression model may be assessed using the adjusted ρ2 statistic which may be estimated using Eq. 4.
Here L(0) is the value of the log-likelihood function when all parameters are zero, L(β) is the value of the log likelihood function at its maximum and k is the degree of freedom. PLOS models were developed considering the best level (L1) as the base level of dummy variable.
Perception rating models
Perception rating prediction models were calibrated with the perception survey data using LIMDEP 5.0. The perception rating models for all the six PLOS assessment parameters are presented in Table 5.
The perception rating models for PLOS assessment parameters relate perception rating outcomes to the condition of various aspects of the candidate sidewalk. The guidelines for assessment of various aspects of sidewalk facility through survey of the facility can be obtained from Table 3. The perception ratings for each PLOS assessment parameter can be estimated using the calibrated perception rating model and survey of various aspects of the sidewalk facility for which PLOS needs to be assessed.
The contribution of condition of various factors on perception levels of individual PLOS assessment parameters were studied in detail to obtain insight of pedestrians expectations on various aspects of the sidewalk facility. The subsequent subsections present detailed assessment of each PLOS assessment parameter and their influencing factors.
Safety issues under pedestrian traffic interaction
The safety issue under Pedestrian Traffic Interaction (PTI) depends on Traffic Volume and Flow (TVF), Pavement Marking and Signs (PMS), Buffer Zone (BZ), Unclean Footpath (UF) and Open Waste Bins (OWB). UF and OWB discourages pedestrians and they are forced to walk close to vehicle carriageway or share vehicle carriageway while walking. The satisfaction perception of pedestrians for safety issue under PTI or PPTI may be obtained from Table 5 or Eqs. 5 and 6.
For example, the perception for safety issues under pedestrian traffic interaction, \({YP}_{PTI}\), if traffic volume and flow in the carriageway (TVF) is at L2 condition (i.e. TVF is 1 0 0 or, \({TVF}_{L2}\) is 1, \({TVF}_{L3}\) is 0 and \({TVF}_{L4}\) is 0); PMS is at L4 condition (i.e. 0 0 1); BZ is at L3 condition (i.e. 0 1 0); UF is at L1 condition (i.e. 0 0 0) and OWB is at L2 condition (i.e. 1 0 0) may be written as Eq. 7.
The perception rating \({P}_{PTI}\) for the above example condition may be obtained by comparing YPPTI values with the μ values for PTI model in Table 5 and Eq. 4 or from the scale provided in Eq. 6.
Marginal effects for the dummy variables were calculated for the PLOS perception prediction models. Marginal effects show the change in probability of different outcomes i.e. the perception ratings with the change of levels of dummy variables compared to the base variable. The marginal effects for perception rating or probability of change of perception rating of PTI for change in levels of TVF, PMS, BZ, UF and OWB from best (L1) to good (L2); acceptable (L3) and worst (L4) was calculated and is presented in Table 6.
From Table 6 it may be observed that the change in factor levels of TVF, PMS, BZ, UF and OWB affect the perception rating level significantly. Table 6 shows that the satisfaction level of TVF is more sensitive to traffic flow condition (smooth or chaotic) compared to traffic volume when pedestrians walk close to carriageway. The probability of pedestrians being unsatisfied (i.e. having perception level 1) increases by 41.6% when low volume smooth traffic changes to high volume chaotic traffic whereas same probability decreases by 25% when the change is to high traffic volume and non-chaotic flow. It can be observed that satisfaction perception level is not much sensitive to change in conditions of PMS or BZ. Past studies indicate significant improvement in satisfaction and safety perception of pedestrians with adequate pavement marking and buffer zone area (Dixon 1996; Houten et al. 2002). The difference in result may be because in mixed land-use areas of old cities, properly marked pedestrian sidewalk with buffer from traffic is rare and therefore, pedestrians may not perceive the importance of marking and buffer zone for sidewalks. The satisfaction level rating was found to be sensitive to usability of available pedestrian infrastructure as rating was observed to improve with regular cleaning of footpath and removal of open waste bin from the footpath.
Availability and condition of pedestrian infrastructure
Availability and Condition of Pedestrian Infrastructure (PI) was found to be an important PLOS assessment parameter. Important factors identified for measurement of PI were Footpath Width (FW), Footpath Height (FH), Quality of Footpath Surface (QFS), Type of Footpath Surface (TFS) and Change in Footpath Height (CFH), as defined in Table 2. The marginal effects for satisfaction rating of PI for change in levels of FW, FH, QFS, TFS and CFH from best (L1) to good (L2); acceptable (L3) and worst (L4) were calculated and is presented in Table 7. For example, FH of 5 cm is considered as the best condition of availability of elevated footpath, but when footpath height increases, the condition worsens due to accessibility issue.
It may be observed from Table 7 that FW is an important parameter and probability of being extremely unsatisfied (P1) and unsatisfied (P2) increases by 25.3% and 44.5% respectively when footpath width becomes lower than 1.5 m. Literature also suggests that footpath width is an important parameter in PLOS assessment (Raad, 2018). As footpaths are not provided with ramps, increase of footpath height increases chance of perceived dissatisfaction. Frequency of change in footpath height (CFH) also decreases satisfaction. The impact of QFS and TFS condition does not cause extreme dissatisfaction to pedestrians.
Pedestrian convenience and sense of security
Convenience and sense of security (CS) provided by pedestrian infrastructure facility, an important parameter, had been widely used in PLOS assessment. The factors perceived to be important in assessing satisfaction level for pedestrian convenience and sense of security are pedestrian volume (PV), roadside shops attracting pedestrians (SAP), electric poles, trees etc. causing hindrance to walking (EPH), sidewalk maintenance (SM), and availability of covered dustbins at regular intervals (CD). Table 8 presents the marginal effects for satisfaction rating of CS for change in conditions of PV, SAP, EPH, SM and CD from best (L1) to good (L2), acceptable (L3) and worst (L4).
It may be observed from Table 8 that satisfaction levels of satisfied (P4) and very satisfied (P5) were not sensitive to change of pedestrian facility condition. This can be due to the fact that the scale interval of satisfaction perception level P3 is large (ranging from 2.2–9.42) and shift in satisfaction perception from P3 to P4 will require significant change in condition of the factors. The available pedestrian facility for mixed land-use areas of old cities usually have many shops, very few covered dustbins and generally have electric poles at the middle of the footpath causing hindrance to walking. In this situation, pedestrians cannot perceive the best condition and provide a satisfaction level of acceptable (P3) or below in most conditions. Also it may be observed that the satisfaction rating is most sensitive to PV and as PV decreases the dissatisfaction increases rapidly. High pedestrian volume provides a sense of security to the users. This reconfirms the findings from past work (Mackett 2001).
Night time walking
Night time walking (NW) condition provided by pedestrian facility is an important parameter for PLOS assessment. Satisfaction rating of NW conditions depend on lighting facility (LN), police patrolling (PPN) and availability of video surveillance facilities or CCTV cameras (CCTV). Table 9 presents the marginal effects for perception rating or probability of change of perception rating of NW for change in availability conditions of LN, PPN and CCTV from best (L1) to good (L2); acceptable (L3) and worst (L4).
It may be observed from Table 9 that perception of satisfaction level was more sensitive to availability and frequency of CCTV cameras focussing to keep constant surveillance on sidewalk compared to PPN. LN condition was also an important parameter and satisfaction level assessment was very sensitive to LN for night time walking condition.
Encroachment on footpath
Footpath encroachment (EN) is commonly observed in old cities having mixed land-use. EN had been identified as an important PLOS assessment parameter at many places (Krambeck 2006; Jensen 2007; Juremalani and Chauhan 2017). The effect of type of encroachment on satisfaction rating of sidewalks has not been studied so far. In this work, effect of type of encroachment on satisfaction perception of pedestrian facility was studied. EN can be due to vendors (ETV), shop extensions displaying goods on footpaths (EPS) or due to illegally parked vehicles on the footpath (IPV). The effect of the proportion of footpath encroached by vendors, shop extensions and parked vehicles on satisfaction level was studied by developing satisfaction rating model presented in Table 5. Table 10 presents the marginal effects for satisfaction rating of EN for change in conditions of ETV, EPS and IPV from best (L1) to good (L2), acceptable (L3) and worst (L4).
It can be observed that encroachment due to effect of shop extension causes greater discomfort to pedestrians compared to illegally parked vehicles or street vendors for the same level of partial encroachment.
Pedestrian walking comfort
Pedestrian walking comfort (PC) level and satisfaction for comfort level had been widely used as an important PLOS assessment parameter in PLOS literature (Asadi-Shekari et al. 2014; Rani et al 2018; Yang et al. 2019). Satisfaction level for PC while walking was found to be dependent on the availability of shades and trees along footpath (ST), availability of access ramps to elevated footpath (RAF) and availability of seating facility and drinking water (AMN) at convenient intervals. Table11 presents the marginal effects for perception rating or probability of change of perception rating of PC for change in conditions of ST, RAF and AMN from best (L1) to good (L2), acceptable (L3) and worst (L4).
It can be observed that all the identified comfort parameters affect the satisfaction rating of PC significantly.
Perception rating model validation
The perception rating models were validated by comparing actual and predicted perception ratings for 100 perception rating experiments for each model. Table 12 presents the actual and predicted satisfaction rating outcomes.
It may be observed from the comparison of predicted and actual satisfaction ratings that the predicted ratings from the models developed and actual satisfaction ratings show significant similarity for all models.
Proposed PLOS model–illustration and discussion
The proposed PLOS model takes into consideration user’s satisfaction level for all the relevant pedestrian infrastructure related factors which affect walkability of sidewalks and their relative importance through perception rating models. In an attempt to illustrate the use of the proposed PLOS assessment model, five locations of Patna, India namely Bailey road, Boring road, Kankarbagh road, Ashok Rajpath and Rajendra Nagar, having widely varying sidewalk conditions, were selected and attempt was made to assess their PLOS using the proposed model. The locations were surveyed to get the details of the sidewalk conditions related to the identified PLOS assessment parameters namely safety issues under pedestrian traffic interaction, availability and condition of pedestrian infrastructure, pedestrian convenience and sense of security, night time walking conditions, encroachment on footpath and pedestrian walking comfort. For recording details of condition of each PLOS assessment parameter, the condition of their underlying factors were recorded in a scale of best to worst following the guidelines proposed in Table 3. For example, for recording condition of ‘availability and condition of pedestrian infrastructure’, footpath width, footpath height, condition of footpath surface, type of footpath surface and change in footpath height per km observed were recorded. If the footpath width was more than 2 m, the condition of footpath width was recorded as L1 or best condition and if there were more than 10 height changes per km, the footpath height change was recorded as L4 or worst condition. Then using the inputs from survey and proposed satisfaction rating models detailed in Table 5, the satisfaction ratings for the six identified PLOS assessment parameters i.e. PPTI, PPI, PCS, PNW, PEN and PPC were determined. The perception score and PLOS outcome were then estimated from the proposed PLOS model detailed in Sect. 3. The five locations surveyed had PLOS outcomes of A, B, C, D and E and Fig. 2 gives a detailed account of the pedestrian facilities of these locations.

PLOS assessment illustrations
Conclusions
In this work, a PLOS assessment model for sidewalks was developed for mixed land-use areas of old cities. A conceptual definition of old city was developed for this study. Level of service indicates pedestrians’ satisfaction level with the available walking infrastructure in the city. Pedestrians’ satisfaction level depends on various sidewalk-related factors, which can be broadly classified as encouragement factors and discouragement factors for walking. Initially, 24 encouragement and discouragement factors relevant for walking condition assessment of sidewalks had been identified from literature. The importance assigned to these factors by pedestrians regularly using the sidewalks of typical old city, as conceptualized for this study, was recorded through survey. The importance assigned to these 24 factors were recorded in a scale of 1 – 5 where 1 indicates least important and 5 indicates very important and 550 pedestrians from Patna and Gaya, India participated in the survey. With these importance ratings, six important PLOS assessment parameters and their underlying influencing factors were identified using PCA. The six important PLOS assessment parameters identified were safety issues under pedestrian traffic interaction (PTI), availability and condition of pedestrian infrastructure (PI), pedestrian convenience and sense of security (CS), night time walking (NW), encroachment on footpath (EN) and pedestrian walking comfort (PC). PTI included traffic volume and flow condition, footpath markings, presence of buffer zone, cleanliness of footpath and presence of open waste bin on footpath. PI included footpath height, width, surface type and condition and change of footpath height per kilometre. CS included pedestrian volume, roadside vendors attracting pedestrians, presence of electric poles causing hindrance to walking, sidewalk maintenance and availability of covered waste bins at regular intervals. NW included factors like night time lighting of footpath, availability of CCTV and police patrolling. EN included encroachment by temporary vendors, shop extensions on footpath and illegally parked vehicles on footpath. PC included presence of shades for pedestrians, availability of seating facility and drinking water and presence of access ramps for elevated footpaths. The proposed PLOS model considers pedestrians’ perception for these six identified parameters in a scale of 1 – 5 where 1 indicates least satisfactory and 5 indicates extremely satisfactory.
The satisfaction rating of a given footpath any pedestrian is expected to provide for any parameter depends on the condition of the sidewalk pertaining to the parameter. The condition of the sidewalk pertaining to any parameter depends on the condition of underlying factors which were obtained from PCA. The usual practice for obtaining pedestrians’ perception for PLOS assessment parameters is through satisfaction survey that involves a great deal of survey effort. Moreover, the PLOS outcome depends on the sample of pedestrians surveyed and no clear guideline is provided to the surveyors for doing the survey of pedestrian population. The unique feature of the present work is the calibration of satisfaction rating scales for all the identified PLOS assessment parameters. The satisfaction rating scales relate sidewalk condition pertaining to each parameter to expected satisfaction rating provided by pedestrians used to the old city conditions.
Six perception rating models were developed to predict ordered satisfaction ratings (in 1–5 scale) for infrastructure conditions for the six PLOS assessment parameters using Ordered Probit Models, which takes into account the variability in human perception. Randomised design of experiments for different scenarios were used to relate infrastructure conditions affecting PLOS assessment parameters and satisfaction perception ratings. The perception ratings for the six PLOS assessment parameters can be predicted using the model which requires the sidewalk condition and this can be obtained by surveying the sidewalk condition using the survey guidelines proposed in this work. This helps to do away with the requirement of pedestrian survey for PLOS assessment. The proposed perception rating models accommodate a wide range of sidewalk infrastructure variability as expected in the conceptualized old city settings and can be used for assessing all types of walking conditions.
The proposed PLOS assessment model is an effort to eliminate variability in outcomes of various PLOS models suggested in literature and suggest a methodology for eliminating pedestrian survey for PLOS assessment with models using qualitative parameters. The perception rating models developed in the study can not only be used for determining PLOS of a sidewalk stretch but may be used as a tool for designing focused sidewalk improvement strategies as minute contribution of each underlying factor in PLOS perception may be obtained from the perception rating models as discussed in detail in the paper. Also the proposed framework for development of perception rating models may be used as a guideline for development of similar perception rating models for other types of cities and land-use conditions.
Availability of data and material
All data, models and code generated or used during the study are available from the corresponding author by request. Importance survey data, Perception survey experiment data.
References
Aghaabbasi, M., Moeinaddini, M., Shekari, Z., Shah, M.Z.: The equitable use concept in sidewalk design. Cities 88, 181–190 (2019). https://doi.org/10.1016/j.cities.2018.10.010
Asadi-Shekari, Z., Moeinaddini, M., Shah, M.Z.: A pedestrian level of service method for evaluating and promoting walking facilities on campus streets. Land-Use Policy. 38, 175–193 (2014). https://doi.org/10.1016/j.landusepol.2013.11.007
Berger, M.P., King, C.Y., Wong, W.K.: Minimax D-Optimal designs for item response theory models. Psychometrika 65(3), 377–390 (2000). https://doi.org/10.1007/BF02296152
Bivina, G.R., Parida, M.: Prioritizing pedestrian needs using a multi-criteria decision approach for a sustainable built environment in the Indian context. Environ. Dev. Sustain. 22(5), 4929–4950 (2019). https://doi.org/10.1007/s10668-019-00381-w
Bivina, G.R., Parida, P., Advani, M., Parida, M.: Pedestrian level of service model for evaluating and improving sidewalks from various land-uses. European Transp. 67(2), 1–18 (2018)
Daly, A., Dekker, T., Hess, S.: Dummy coding vs effects coding for categorical variables: clarifications and extensions. J. Choice Model. 21, 36–41 (2016). https://doi.org/10.1016/j.jocm.2016.09.005
Dandan, T., Wei, W., Jian, L.U., Yang, B.: Research on methods of assessing pedestrian level of service for sidewalk. J. Transp. Syst. Eng. Inf. Technol. 7(5), 74–79 (2007). https://doi.org/10.1016/S1570-6672(07)60041-5
Dixon, L.B.: Bicycle and pedestrian level-of-service performance measures and standards for congestion management systems. Transp. Res. Rec. 1538(1), 1–9 (1996). https://doi.org/10.1177/0361198196153800101
Ewing, R., Handy, S., Brownson, R.C., Clemente, O., Winston, E.: Identifying and measuring urban design qualities related to walkability. J. Phys. Activ. Health. 3((Suppl. 1)), S223–S240 (2006). https://doi.org/10.13016/M2JD4PT3R
Ewing, R., Connors , B.M., Goates , J.P., Hajrasouliha, A., Neckerman, K., Nelson , A.C., Greene, W.: Validating Urban Design Measures. Transportation Research Board 92nd Annual Meeting. Washington DC, United States (2013)
Florez, J., Muniz, J., Portugal, L.: Pedestrian quality of service: lessons from maracanã stadium. Soc. Behav. Sci. 160, 130–139 (2014). https://doi.org/10.1016/j.sbspro.2014.12.124
Fruin, J.: Pedestrian Planning and Design. Metropolitan Association of Urban Designers and Environmental Planners, NewYork, (1971)
Galanis, A., Eliou, N.: Evaluation of the pedestrian infrastructure using walkability indicators. WSEAS Trans. Environm. Develop. 7(12), 385–394 (2011)
Government of Western Australia (DOT).: Walkability Audit Tool (2011)
Houten, V.R., McCusker, D., Huybers, S., Malenfant, J.L.: Advance yield markings and fluorescent yellow-green RA 4 signs at crosswalks with uncontrolled approaches. Transp. Res. Rec. 1818(1), 119–124 (2002). https://doi.org/10.3141/1818-18
Huybers, S., Houten, R.V., Malenfant, J.L.: Reducing conflicts between motor vehicles and pedestrians: the separate and combined effects of pavement markings and a sign prompt. J. Appl. Behav. Anal. 37(4), 445–456 (2004). https://doi.org/10.1901/jaba.2004.37-445
Indian Highway Capacity Manual.: Council of Scientific and Industrialist Research and Central Road Research Institute. New Delhi, India (2017)
Jaskiewicz, F.: Pedestrian Level of Service based on trip quality. TRB Circular E-C019: Urban street symposium (pp. G 1–12). Dallas, Texas.: Transportation Research Board (2000). https://onlinepubs.trb.org/onlinepubs/circulars/ec019/Ec019_g1.pdf
Jensen, S.U.: Pedestrian and bicyclist level of service on roadway segments. Transp. Res. Rec. 2031(1), 43–51 (2007). https://doi.org/10.3141/2031-06
Johnson, F.R., Lancsar, E., Marshall, D., Kilambi, V., Muhlbacher, A., Regier, D.A., Bridges, J.F.: Constructing experimental designs for discrete-choice experiments: report of the ISPOR conjoint analysis experimental design good research practices task force. Value in Health. 16, 3–13 (2013). https://doi.org/10.1016/j.jval.2012.08.2223
Juremalani, D., Chauhan, K.: Study of correlation between urban physical environment and walkability for cities of “Y” category in Indian context using analytical hierarchy process and simple additive weighing methods of multi criteria decision making. Indian J. Sci. Technol. 10(17), 1–6 (2017)
Kadali, B.R., Vedagiri, P.: Evaluation of pedestrian crosswalk level of service (LOS) in perspective of type of land-use. Transp. Res. Part a: Policy and Pract. 73, 113–124 (2015). https://doi.org/10.1016/j.tra.2015.01.009
Kadali, B.R., Vedagiri, P.: Review of pedestrian level of service: perspective in developing countries. J. Transp. Res. Board 2581(1), 37–47 (2016). https://doi.org/10.3141/2581-05
Kanninen, B.J.: Optimal design for multinomial choice experiments. J. Mark. Res. 39(2), 214–227 (2002)
Karatas, P., Yaman, H.T.: Variability in sidewalk pedestrian level of service measures and rating. J. Urban Plann. Develop. 144(4), 1–12 (2018). https://doi.org/10.1061/(ASCE)UP.1943-5444.0000483
Khisty, C.J.: Evaluation of pedestrian facilities: beyond the level-of-service concept. Transp. Res. Rec. 1438, 45–50 (1994)
Koh, P.P., Wong, Y.D.: Comparing pedestrians’ needs and behaviours in different land-use environments. J. Transp. Geogr. 26, 43–50 (2013). https://doi.org/10.1016/j.jtrangeo.2012.08.012
Krambeck, H.V.: The global walkability index. Massachusetts Institute of Technology, Department of civil and environmental engineering, Massachusetts (2006). http://hdl.handle.net/1721.1/34409
Landis, B.W., Vattikuti, V.R., Ottenberg, R.M., McLeod, D.S., Guttenplan, M.: Modeling the roadside walking environment pedestrian level of service. J. Transp. Res. Board 1773, 82–88 (2001). https://doi.org/10.3141/1773-10
Leather J., Fabian H., Gota S., Mejia A.: Walkability and Pedestrian Facilities in Asian Cities State and Issues. Asian Development Bank. Manila, Philippines (2011). http://hdl.handle.net/11540/1408
Macdonald, E., Szibbo, N., Eisenstein, W., Mozing, L.: Quality-of-service: toward a standardized rating tool for pedestrian quality of urban streets. J. Urban Des. 23(1), 71–93 (2017). https://doi.org/10.1080/13574809.2017.1340092
Mackett, R.L.: Policies to attract drivers out of their cars for short trips. Transp. Policy 8(4), 295–306 (2001). https://doi.org/10.1016/S0967-070X(01)00025-7
Majumdar, B.B., Mitra, S.: Development of level of service criteria for evaluation of bicycle suitability. J. Urban Plann. Develop. 144(2), 1–14 (2018). https://doi.org/10.1061/(ASCE)UP.1943-5444.0000432
Mori, M., Tsukaguchi, H.: A new method for evaluation of level of service in pedestrian facilities. Transp. Res. Part a: General. 21(3), 223–234 (1987). https://doi.org/10.1016/0191-2607(87)90016-1
Moura, F., Cambraa, P., Goncalves, A.P.: Measuring walkability for distinct pedestrian groups with a participatory assessment method: a case study in Lisbon. Landsc. Urban Plan. 157, 282–296 (2017). https://doi.org/10.1016/j.landurbplan.2016.07.002
Parida, P., Parida, M.: Development of qualitative evaluation methodology for sidewalks In Delhi. ITPI J. 4, 27–33 (2007)
Raad, N., Burke, M.I.: What are the most important factors for pedestrian level-of-service estimation? a systematic review of the literature. Transp. Res. Rec. 2672(35), 101–117 (2018). https://doi.org/10.1177/0361198118790623
Rani, K., Boora, A., Bivina, R. G., Parida, M.: Which factors affect “walkability” of pedestrians on sidewalk in Indian cities?. In: Proceedings of the Eastern Asia Society for Transportation Studie. 11 (2018)
Sarkar, S.: Determination of service levels for pedestrians, with European examples. Transp. Res. Rec. 1405, 35–42 (1993)
Silva, A.R., Shah, M.Z.: Pedestrian infrastructures and sustainable mobility in developing countries: The cases of Brazil and Malaysia. XVI Panam, Lisbon (2010)
Sutikno, F.R., Surjono, Kurniawan, E.B.: Walkability and pedestrian perceptions in Malang City emerging business corridor. Procedia Environmental Sciences, 17, 424–433 (2013). https://doi.org/10.1016/j.proenv.2013.02.056
The indian roads congress.2012.IRC:103–2012. Guidelines for pedestrian facilities. New Delhi. India.
Washington, S., Karlaftis, M., Mannering, F.: Statistical and Econometric Methods for Transportation Data Analysis, 2nd edn. Chapman and Hall/CRC, Boca Raton (Florida) (2011)
Yang, L., Wang, X., Sun, G., Li, Y.: Modeling the perception of walking environmental quality in a traffic-free tourist destination. J. Travel Tourism Mark. 37(5), 608–623 (2019). https://doi.org/10.1080/10548408.2019.1598534
Acknowledgements
The authors would like to acknowledge the efforts of M Tech scholars Mr. P. Radha Krishna Prasad, Mr. Amit Kumar, Mr. Nandan Raju, Mr. Shahrukh Jan, and Ms. Bandana Kumari of Department of Civil Engineering, National Institute of Technology Patna for their active participation in importance and satisfaction survey from pedestrians of Patna, India.
Author information
Authors and Affiliations
Contributions
There is no single Pedestrian Level of Service (PLOS) assessment model which systematically takes into account the contribution of all relevant factors in deciding the level of service provided by sidewalks. Also, no comprehensive PLOS assessment model is available for old cities having mixed land-use where well-defined pedestrian facilities may not always exist. Thus the authors: Developed a comprehensive PLOS assessment model for mixed land-use urban areas of old cities. The model is developed using a list of 24 relevant factors for mixed land-use areas of old cities from literature. Importance survey for the identified list of factors was conducted with 550 pedestrians from urban areas of Patna and Gaya, India. Both the cities meet the criteria of old cities, as conceptualized in this work, and have predominantly mixed land-use. Principal Component Analysis (PCA) was used to group and reduce the number of factors and find the important factor groups or parameters by identifying the underlying factor structure. Six important parameters were identified namely safety issues under pedestrian traffic interaction, condition of pedestrian infrastructure, pedestrian convenience and sense of security, night time walking, encroachment and walking comfort. The perceived level of service of sidewalk depends on the perceived satisfaction of pedestrians with respect to these parameters. The available PLOS assessment models consider perceived satisfaction of pedestrians as scaled perception ratings. The perceived satisfaction varies between individuals and thus involves subjectivity in PLOS assessment. To eliminate subjectivity in PLOS assessment, the authors. Developed satisfaction rating prediction model for all the identified parameters. The satisfaction rating for a parameter depends on the condition of the underlying factors. The condition of each of the factors were categorized into four levels from best to worst. Random experimental condition for a parameter was defined by combination of factor conditions. The randomised conditions for each parameter was designed using D-optimal design of experiments. 16 conditions were obtained for each parameter. Satisfaction rating survey was conducted with 780 participants and each participant was given 16 randomised experiments. Ordered Satisfaction rating prediction models were developed with Ordered Probit model for each parameter. These models relate condition of sidewalk facility with perceived satisfaction in the form of scaled rating.
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Ujjwal, J., Bandyopadhyaya, R. Development of Pedestrian Level of Service (PLOS) model and satisfaction perception rating models for pedestrian infrastructure for mixed land-use urban areas. Transportation 50, 355–381 (2023). https://doi.org/10.1007/s11116-021-10247-8
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11116-021-10247-8