
Abstract
Visible Light Communication (VLC) can be utilized for Indoor Positioning Systems (IPSs). Most of VLC IPSs work when LED lights are ON. This causes energy less when lighting system is off, at least when sleeping. We face a fundamental challenge in VLC systems that require the light ON all time. Then how to communicate when the lights appears “OFF”? In this paper, we propose a positioning system of receiver that is used in dark light VLC based on the Received Signal Strength (RSS) positioning technique, showing its possibility to use in dark environment. Because of its simplicity, the RSS technique is used in indoor positioning. This proposition can ensure the IP even when light is “OFF”, which can be actualized in VLC systems to save energy and give precise illumination control. The obtained results reveal that the average error in positioning with LED power of dark VLC is lower than that in the normal mode. The obtained simulation results reveal that the average positioning error is improved by 25% of traditional method when Dark VLC is used with 1.4 mW LED power without background noise. This ensures that the proposed system shows superiority when compared with other VLC IPS systems, in energy saving and high positioning accuracy.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Scholarly community and industry noticed the value of the indoor positioning issue and assigned exertion and rivalries into understanding longer than 10 years. The principal inspiration driving them is to allow to different insightful and industry gatherings to inspect their indoor limitation progressions in a commonsense circumstance. Additionally, it licenses specialists to indoor situating to meet and help out one another.
Positioning has a promising future in individual navigation. Moreover, the physical area information in mobile nodes could greatly help in urban and rescue applications, in addition to enabling routing in multi-hop ad-hoc networks. Sometimes, the physical area is considered in localization and positioning (Karegar 2018 and Zaruba 2007).
The indoor positioning techniques are considered as best foundations in realization of 5G networks and Internet of Things (IoT), providing location-based services (Irshad et al. 2019 and Pham et al. 2019). After the tremendous success in outdoor navigation systems (Do et al. 2016 and Xu et al. 2016), the GPS (Global Positioning System) is the best choice in outdoor applications. It is the most usually utilized and exact strategy for sensor positioning. Sadly, the GPS arrangement does not generally perform well due to cost, restricted force gracefully and so forth (Halder et al. 2016). The limitation situating must be sensible for the workplace, for example, wall structure,, lighting conditions, ceiling shape in indoor situations influence the exhibition of the positioning system. The level of these impacts may fluctuate contingent upon the utilized strategy (Karakaya et al. 2020).
Although the GPS based positioning system is the favored answer for outside situations (S. Karakaya et al. 2020), however, it is not appropriate for indoor applications because of its inability to penetrate walls in buildings (Holm 2012). The IPSs are based mainly on radio frequency identification (RFID), ultrasound, and wireless-local area networks (WLANs) (Saab et al. 2011), including Zigbee-based IoT, WiFi (Akram et al. 2018), and Bluetooth (Li et al. 2018).
Visible light positioning (VLP) is considered one of main attractive applications, where it allows development of highly reliable, inexpensive, and robust positioning techniques (Keskin et al. 2018). VLP is based on the light emitting diodes (LEDs) risen as of late, which is rapidly over-riding conventional incandescent and fluorescent light sources. LED lighting technology is a promising application in VLC (Haas et al. 2016). It exploits the better balance capacity of LEDs than transmitting information through a wireless channel, supporting rapid data rate, economic, electro-magnetic interference free and high security, compared with traditional radio-frequency (RF) systems. It can be utilized in RF restricted zones (e.g., airport and medical clinic), where VLC can work at the same time giving communication and illumination (Zafar et al. 2015) and became an essential field of indoor positioning.
VLP is kept away from the effects of electromagnetic interference, noise, and stability (Xiao et al. 2011). Its points of interest include high bandwidth, high positioning accuracy and free license (Vatansever et al. 2017). In addition, it offers a higher security for clients since visible light signals cannot transmit over the walls and may not be accessed by spying from other rooms (Wang et al. 2018). Also, VLP has less impact of multipath on visible light and can provide high-accuracy positioning performance compared with RF signal based indoor positioning systems (Yang 2020). So, the position estimation could be increasingly precise. VLC based IPSs are created and can accomplish a generally excellent accuracy with a few cm error (Ding et al. 2015a, b). VLP utilizes visible light signals to determine situation of the recipient (Rx). The signals are generated within light sources (e.g. LEDs) and are received through photodetectors (e.g. image sensor or photodiode) (Liu et al. 2018).
One of VLP classes depends on the trilateration technique, wherein data at any rate from 3 LEDs are utilized for position estimation of receiver (Zhang et al. 2012 and Zhou et al. 2012). A basic prerequisite in such a system is that output signals of various LEDs have to be recuperated independently at the recipient. Both transporter positioning methods and time division multiplexing (TDM) are created to fulfill this objective. In TDM techniques, LEDs transmission times are arranged to evade any overlap in the received signals.
For the interesting points, positioning is based on the distance measurement method. The positioning calculation includes a time difference of arrival (TDOA), a time of arrival (TOA), an angle of arrival (AOA) positioning algorithms, and the RSS positioning techniques (Li et al. 2020). In Fig. 1, a VLC indoor positioning system is explained using the RSS technique. The visible light signals are used to estimate distances between each reference nodes and positioning goal (Shi et al. 2019).

Indoor visible light communication
The block diagram of the VLC-based indoor positioning system is illustrated in Fig. 2, using the RSS technique.

Block diagram of VLC indoor positioning system using RSS technique
In our work, we concentrate on the dark VLC positioning system depending on the RSS technique because this scheme is easy to acknowledge with no synchronization needed between transmitter and receiver. Assuming at least 3 LEDs, a trilateration positioning could be applied considering the impact of range of communication and objective field of view (FoV). We propose a positioning system of receiver that is used in dark light VLC depending on RSS positioning algorithm and we discuss its possibility to be used. Because of its high accuracy and simplicity, the RSS positioning is utilized for indoor positioning.
The remainder of this paper is organized as follows. Section 2 illustrates system modeling and indoor channel models. Section 3 presents the characteristics of dark light (DL)-VLC transmitter and receiver. The positioning RSS algorithm is discussed in Sect. 4. The obtained results are displayed and discussed in Sect. 5. Section 6 is devoted to the concluding interpretations.
2 VLC system modeling
The VLP has been developed as a promising VLC application. It is more appropriate in indoor cases (Neha et al. 2019). Since LED switches faster than the eye response, it could be adjusted at high bit rates; offering communication capabilities besides illumination. This falls into the visible light range 380–780 nm. When users do not need the illumination and the lights are turned OFF, then, there is a possibility to transmit information without illumination (Tian et al. 2016). This makes the dark VLC saves energy with low power light. This is the main principle of dark light VLC that could be used in modulating light signals into ultra-short light pulses that are impalpable by natural eye (Wrighty et al. 2016 and El-Gamal et al. 2020).
Dark light configuration uses the off-shelf, with low cost LEDs and photodiodes (Yang 2020 and Ding et al. 2015a, b). In each LED, PPM modulation and flicker are utilized with an ultra-short impulse (Wrighty et al. 2016). Figure 3 shows a 0.007% duty cycle, 500 ns time, and 1000 lm amplitude with a frequency of 160 Hz for each impulse.

VLC signal and dark light VLC signal
3 Characteristic of DL-VLC transmitter and receiver
Figure 4 illustrates the block diagram of a dark light VLC based IPS system, consisting of a VLC transmitter, receiver, and a positioning estimation algorithm.

VLC indoor positioning system: Functional block diagram of dark light VLC
3.1 Transmitter
Table 1 lists the system parameters used. Here, we are considering single-LED array and multiple-LED array 60 × 60 (Ding et al. 2015a, b). We determine The LEDs location in the room could be determined when 4 LED arrays are used with locations (1.25, 1.25, 3), (1.25, 3.75, 3), (3.75, 1.25, 3), (3.75, 3.75, 3), as shown in Fig. 5.

The 4 LED arrays locations on the ceiling
The VLP system, shown in Fig. 6, consists of four sections, including VLC nodes (reference arranges), a client device, a router, and a server. The VLC nodes, which are fixed on the ceiling of the room, are utilized to communicate visible light signals with area data to the room. A client device receives visible light signals from nodes by utilizing a photodiode (PD), and three reference transmitters and the data from ID number of each node. From that point, a trilateration positioning technique is used for location estimation. The ID is decoded by the receiver to recover the light fixtures absolute location. The RSS is also used in receiver to estimate the distance. The client further communicates with a router in the room and uploads the information of all received VLC signals to a server. The server stores a list that shows the balanced connection between the ID numbers and the directions for every node. By modeling the characteristics of the VLC channel, the distances between the user device (receiver) and the VLC nodes can be measured by the RSS technique, and the client position can be assessed by the least square method. Discovering three particular separation estimations, the location of the objective can be assessed. The distance measurement and localization estimation are conducted in the server and the result will be sent to the user device (Shi et al. 2019).

VLC indoor positioning system model in the dark light
LoS and NLoS links should be taken into consideration in distance measurement because the localization system based on RSS is sensitive to NLoS signals. However, in dark light, the NLoS effect could be neglected because the localization measurement is weak.
3.2 VLP estimation
The trilateration is utilized for location estimation. It requires a shortest path for the transmitted signal that finds the objective dependent on the distance estimation starting from various reference points. In other words, triangulation finds the object position based on the AOA data w.r.t. the reference point. The trilateration technique locates the objective through receiving the light beacon messages from three non-collinear reference points with the aid of the RSS, TOA, and TDOA, which are the potential parameters to be measured by sensor receivers (Afzalan et al. 2019).
Trilateration is a method of determining the relative position of objects using the geometry of triangles in a similar fashion as triangulation. In trilateration, if the target node is inside the communication range of the anchor nodes, distances of the target node to all three anchor nodes based on their distances can be calculated. Trilateration method is used to compute the coordinate of target node by calculating intersecting point of three circles. The target is was basically the intersection point of all three circles. Unlike triangulation, which uses angle measurements (together with at least one known distance) to calculate the subject's location. It is the process of calculating unknown point by using three points and distance from each point to unknown point. The three points can be a circle or a triangle. This will be clearly illustrated in our LED system, in the following subsection (Fig. 7).

Positioning using RSS based trilateration technique
Trilateration uses the known locations of two or more reference points, and the measured distance between the subject and each reference point. It uniquely determines the relative location of a point on a 2D plane using trilateration alone. The limitation of using this method is that at least 3 reference points are needed for 2D calculations, and at least 4 points are needed for 3D calculations.
3.2.1 Positioning algorithm received signal strength (RSS)
Generally, the RSS-based method has been utilized in visible light and indoor positioning systems. The RSS values are so easy to obtain, as compared with other attributes, utilizing a single photodetector without requiring auxiliary devices. Typically, the intensity of the received signal follows the channel model. Consequently, the intensity is reduced when the transmitter—receiver spacing increases. Based on this model, many algorithms could be applied in LED positioning systems, such as trilateration, fingerprinting, and proximity (Zhuang et al. 2018).
The RSS system estimates the position depending on the received signal power. So, it is sensitive to noise. Nevertheless, RSS system has higher precision as compared to fingerprinting and proximity techniques (Neha et al. 2019), as well as being cost-effective and simpler. The receiver is distinguished to be situated at the intersection point of all the three circles centered at their individual transmitters. Figure 7 shows the receiver position estimation in the existing RSS-based trilateration technique, which technique measures the distance relying on the RSS. Therefore, the exactness of estimating the receiver position could be influenced by background light (outside sources, for example: daylight).
3.2.2 Optical channel model
The LoS received strength, Pr, can be described as (Li et al. 2020)
where Pt, R0(φ), d0, φ, and θ denote, respectively, the average transmitted power, the transmit angle gain, the Euclidean distance between transmitter and receiver, the irradiation angle, and the incidence angle. Aeff is the effective receiving gain and is given by (Mohammed et al. 2015)
where A, Ts(θ), g(θ) denote, respectively, the physical detector area, optical filter gain, and concentrator gain. The LED emission can be expressed as a Lambertian emission. So, R0(φ) can be written in the form
where m is the Lambertian order of the LED number, i.e. transmitter directivity, which is related to the half-angle of the LED transmitter, φ1/2.
The received signal strength from the directed channel could be represented as
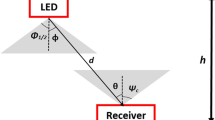
Since both LED axis and receiver axis are parallel, Fig. 8, so, one can rewrite Eq. (6) in the form
Here, h is the vertical distance between photodiode and LED.

VLP system
The output electrical power of the photodiode is given by
Or
where R denotes the photodiode responsivity.
3.3 Distance
Hence, the coordinate calculation is expected to use the distance calculated by RSS method to form coordination as a part of positioning system. The coordinate can be calculated using the trilateration method and distance data from RSS calculation. Thus, d the spacing between transmitter and receiver can be expressed as (Kim et al. 2013)
where Pelectrical is the output electrical power and h is the vertical distance from receiver to ceiling.
Using the trilateration process (Reichenbach et al. 2006), one can estimate the receiver position though the distance between receiver and three transmitters at least. The trilateration equations used are
Here, the coordinates of the ith LED are xi, yi, and zi, while xR, yR, and zR are the coordinates of the receiver to be calculated (linear least mean square methodKim et al. 2013).
Since the three LEDs are at the same height, i.e. z1 = z2 = z3, Eq. (10) can be written in a matrix form as
where
and
Now, Eq. (14) can be solved using the linear least mean square method (Reichenbach et al. 2006).
Finally, using linear least square method, the receiver (XEst, YEst) is located by X = BA−1.
3.4 Noise
Since, both shot and thermal noises of the photodiode cause errors on the received power (Qiu et al. 2016), hence, the received signal power, \({P}_{r}\), in the VLC system is the sum of LoS power and the noise power
with a noise power given by
4 Positioning error calculation
Based on the distance difference between each two transmitters set, for each measurement, the error can be obtained as
where XEst is the estimated X coordinate, XRef is the reference X coordinate, YEst is the estimated Y coordinate and YRef is the reference Y coordinate (Ghassemlooy et al. 2013).
The positioning error between estimated coordinates and reference coordinates is used to determine the performance of the VLC-IP (Tran et al. 2019). The localization error could be reduced by increasing the SNR of each LED.
5 Simulation results and discussion
Now, the proposed scheme is simulated in the 5 × 5 × 3m3 model room with four LEDs on the ceiling, as shown in Fig. 6. Table 1 summarizes the simulation parameters. The LEDs transmit 500 ns impulses at a frequency of 160 Hz frequency (with ~ 0.007%), with a guard period of 1000 ms. The RSS positioning algorithm is selected and the mean of localization error is used to assess the system localization precision.
Figure 9 shows the received power distribution resulted by the four LEDs over the whole room, and the SNR at receiver. When the receiver travels away from the room center towards the edges, the brightening level caused by the four LEDs gradually lessens resulting in errors occur, depending on the received power at receiver location. For the receiver’s position estimation, the RSS based trilateration strongly depends on the power received by the photodiode.

Dark light VLP: 4 LEDs transmitters at semi-angle at half power, θ = 60o and FoV = 10°
Figure 10 displays the positioning error distribution with RSS and without the effect of background light. An average error of ~ 4 cm is obtained at 1000 lm LED intensity. The procedure is actualized in different places in the room and the localization errors are estimated.

Positioning error distribution in dark light
Figures 9, 11 and 12 show the received power distribution of LEDs transmitters in the room with a different semi angle and FoV, in addition to SNR at receiver. Figures 10, 13 and 14 depict the positioning error in each case. A zero positioning error indicates the points where localization fails. Obviously, the lower values of both φ ½ and FoV result in VLP system inability in solving the triangulation problem, in some areas, because the RSS measured by at least 3 LEDs could not be obtained. The positioning error in corners is higher than that at center points because less dense light is deployed in the corner points.

Dark light VLP: 4 LEDs transmitters at semi-angle at half power, θ = 10o and FoV = 10°

Positioning error distribution in dark light

Dark light VLP: 4 LEDs transmitters at semi-angle at half power, θ = 60o and FoV = 60°

Positioning error distribution in dark light
6 Conclusion
In this work, a VLC indoor positioning system is utilized in a smart room. Since most of these systems require the light to be ON, resulting in a power waste when the illumination is not required. Here, we discussed the main challenge in dark light VLC environment when the light appears OFF. We suggested a positioning system of receiver based on RSS positioning algorithm. According to the obtained simulation results, an average positioning error ~ 4 cm is achieved with 1.4 mW LED power without background noise. The proposed system shows superiority when compared with other VLC IPS systems, in energy saving and high positioning accuracy.
References
Afzalan, M., Jazizadeh, F.: Indoor positioning based on visible light communication. ACM Comput. Surv. 52(2), 1–36 (2019). https://doi.org/10.1145/3299769
Akram, B.A., Akbar, A.H., Shafiq, O.: HybLoc, Hybrid indoor Wi-Fi localization using soft clustering-based random decision forest ensembles. IEEE Access 6, 38251–38272 (2018). https://doi.org/10.1109/ACCESS.2018.2852658
Ding, J., Xu, Z., Hanzo, L.: Accuracy of the point-source model of a multi-led array in high - speed visible light communication channel characterization. IEEE Photonics J. 7(4), 1–14 (2015a). https://doi.org/10.1109/JPHOT.2015.2450534
Ding, W., Yang, F., Yang, H., Wang, J., Wang, X., Zhang, X., Song, J.: A hybrid power line and visible light communication system for indoor hospital applications. Comput. Ind. 68, 170–178 (2015b). https://doi.org/10.1016/j.compind.2015.01.006
Do, T.H., Yoo, M.: An in-depth survey of visible light communication based positioning systems. Sensors 16(5), 678 (2016). https://doi.org/10.3390/s16050678
El-Gamal, M.M., Fayed, H.A. Aly, M.H., Ismail, N.E.H. and Mokhtar, A.: Interactive internet of things based on dark light system for smart room. Optical and Quantum Electronics, vol. 52:439(1–19), (2020).
Ghassemlooy, Z., and Popoola, W.R. Optical wireless communications; system and channel modelling with MATLAB. CRC Press, Boca Raton (2013).
Haas, H., Yin, L., Wang, Y., Chen, C.: What is LiFi? J. Lightwave Technol. 34(6), 1533–1544 (2016)
Halder, S. and Ghosal, A.: A survey on mobile anchor assisted localization techniques in wireless sensor networks. Wireless Networks, pp. 2317–2336 (2016). https://doi.org/10.1007/s11276-015-1101-2
Holm, S.: Ultrasound positioning based on time-of-flight and signal strength. In International Conference on Indoor Positioning and Indoor Navigation (IPIN), pp. 1–6 (2012). https://doi.org/10.1109/IPIN.2012.6418728
Irshad, M., Liu, W., Arshad, J., Sohail, M.N., Murthy, A., Khokhar, M., Uba, M.M.: A novel localization technique using luminous flux. Appl. Sci. 9(23), 5027 (2019). https://doi.org/10.3390/app9235027
Karakaya, S., Ocak, H.: Low cost easy-to-install indoor positioning system. J. Intell. Robotic Syst. (2020). https://doi.org/10.1007/s10846-020-01193-1
Karegar, P.A.: Wireless fingerprinting indoor positioning using affinity propagation clustering methods. Wireless Networks, pp. 2825–2833 (2018). https://doi.org/10.1007/s11276-017-1507-0
Keskin, M.F., Sezer, A.D., Gezici, S.: Localization via visible light systems. Proc. IEEE 106, 1063–1088 (2018). https://doi.org/10.1109/JPROC.2018.2823500
Kim, H.S., Kim, D.R., Yang, S.H., Son, Y.H., Han, S.K.: An indoor visible light communication positioning system using a RF carrier allocation technique. J. Lightwave Technol. 31(1), 134–144 (2013). https://doi.org/10.1109/JLT.2012.2225826
Li, Z., Braun, T., Zhao, X., Zhao, Z., Hu, F., Liang, H.: A narrow-band indoor positioning system by fusing time and received signal strength via ensemble learning. IEEE Access 6, 9936–9950 (2018). https://doi.org/10.1109/ACCESS.2018.2794337
Li, M., Jiang, F. and Pei, C.: Review on positioning technology of wireless sensor networks. Wireless Personal Communications, published online in 10 (2020). https://doi.org/10.1007/s11277-020-07667-7
Liu, W., Irshad, M., Wang, L., Shah, S.B.H., Sohail, M.N. and Uba, M.M.: Li-local: Green communication modulations for indoor localization. Proceedings of the 2nd International Conference on Future Networks and Distributed Systems, Amman, Jordan, pp. 1–6 (2018).https://doi.org/10.1145/3231053.3231118
Mohammed, N.A., Elkarim, M.A.: Exploring the effect of diffuse reflection on indoor localization systems based on RSSI-VLC. Opt. Express 23(16), 20297 (2015). https://doi.org/10.1364/oe.23.020297
Neha, C., Nero, A.L., and Ghassemlooy, Z.: Feasibility study of reverse trilateration strategy with a single Tx for VLP. The 2nd West Asian Colloquium on Optical Wireless Communications (WACOWC 2019), pp. 121–126 (2019). https://doi.org/10.1109/WACOWC.2019.8770213
Pham, N.Q., Rachim, V.P., Chung, W.Y.: High-accuracy VLC-based indoor positioning system using multi-level modulation. Opt. Express 27(5), 7568–7584 (2019). https://doi.org/10.1364/OE.27.007568
Qiu, Y., Chen, H., and Meng, W.: Channel modeling for visible light communications a survey. Wiley Online Library, pp. 1–19, (2016). https://doi.org/10.1002/wcm.2665
Reichenbach, F., Born, A., Timmermann, D. and Bill, R.: A distributed linear least squares method for precise localization with low complexity in wireless sensor networks. In Proceedings of the Second IEEE International Conference on Distributed Computing in Sensor Systems, Springer-Verlag, San Francisco, CA, pp. 514–528 (2006).https://doi.org/10.1007/11776178_31
Saab, S.S., Nakad, Z.S.: A standalone RFID indoor positioning system using passive tags. IEEE Trans. Industr. Electron. 58(5), 1961–1970 (2011). https://doi.org/10.1109/TIE.2010.2055774
Shi, G., Li, Y., Cheng, W., Dong, L., Yang, J., Zhang, W.: Accuracy analysis of indoor visible light communication localization system based on received signal strength in non-line-of-sight environments by using least squares method. Opt. Eng. 58(5), 056102 (2019). https://doi.org/10.1117/1.OE.58.5.056102
Tian, Z., Wrighty, K. and Zhou, X.: Lighting up the internet of things with dark VLC. HotMobile 16, FL, USA. pp. 33–38 (2016). https://doi.org/10.1145/2873587.2873598
Tran, H.Q., Ha, C.: fingerprint-based indoor positioning system using visible light communication - A novel method for multipath reflections. Electronics 8(63), 1–16 (2019). https://doi.org/10.3390/electronics8010063
Vatansever, Z. and Brandt-Pearce, M.: Visible light positioning with diffusing lamps using an extended Kalman filter. In IEEE Wireless Communications and Networking Conference (WCNC), pp. 1–6 (2017). https://doi.org/10.1109/WCNC.2017.7925652
Wang, J., Liu, C., Wang, J., Wu, Y., Lin, M., Cheng, J.: Physical-layer security for indoor visible light communications: secrecy capacity analysis. IEEE Trans. Commun. 66(12), 6423–6436 (2018). https://doi.org/10.1109/TCOMM.2018.2859943
Wrighty, K., Tian, Z. and Zhou, X.: The dark light rises: visible light communication in the dark. MobiCom16, NY, USA. pp. 495–496, (2016). https://doi.org/10.1145/2973750.2987384
Xiao, J., Liu, Z., Yang, Y., Liu, D. and Han, X.: Comparison and analysis of indoor wireless positioning techniques. International Conference on Computer Science and Service System, pp. 293–296 (2011). https://doi.org/10.1109/CSSS.2011.5972088
Xu, G. and Xu, Y. GPS Theory and Algorithms. Springer Berlin Heidelberg, Germany, pp. 313–340 (2016). https://doi.org/10.1007/978-3-662-50367-6_10
Yang, H.: Visible light communication systems supporting wireless data access and indoor positioning applications. Doctoral thesis, Nanyang Technological University, Singapore (2020). 10356/137178
Zafar, F., Karunatilaka, D., Parthiban, R.: Dimming schemes for visible light communication: the state of research. IEEE Wirel. Commun. 22(2), 29–35 (2015). https://doi.org/10.1109/MWC.2015.7096282
Zaruba, G.V., Huber, M., Kamangar, F.A., Chlamtac, I.: Indoor location tracking using RSSI readings from a single Wi-Fi access point. Wireless Networks, pp. 221–235 (2007). https://doi.org/10.1007/s11276-006-5064-1
Zhang, W. and Kavehrad, M.: A 2-d indoor localization system based on visible light LED. In IEEE Photonics Society Summer Topical Meeting Series, pp. 80–81 (2012). https://doi.org/10.1109/PHOSST.2012.6280711
Zhou, Z., Kavehrad, M. and Deng, P. Indoor positioning algorithm using light-emitting diode visible light communications. Optical Engineering, 51(8), 085009–1–085009–6 (2012). https://doi.org/10.1117/1.OE.51.8.085009
Zhuang, Y., Hua, L., Qi, L., Yang, J., Cao, P., Cao, Y., Wu, Y., Thompson, J., Haas, H.: Survey of positioning systems using visible LED lights. IEEE Commun. Surv. Tutorials 20(3), 1963–1988 (2018). https://doi.org/10.1109/COMST.2018.2806558
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
El Gamal, M.M., Maheswar, R., Fayed, H.A. et al. Dark light visible light communication positioning system with received signal strength technique. Opt Quant Electron 53, 542 (2021). https://doi.org/10.1007/s11082-021-03206-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-021-03206-1