
Abstract
Ocean depth is a critical parameter for several maritime applications, ranging from surveillance to navigation. One method commonly employed is to measure the pressure at an unknown depth, and compare it with that at the surface. Fibre-optic sensors have made significant advances in this direction, conferring exceptional sensitivity, resolution and compactness. In this work, we present a simulation of an ocean depth sensor based on a uniform Fibre Bragg Grating. We study the effect of introducing a uniform layer of coating on the sensitivity. A range of different materials, including metals and polymers, are studied and compared for their sensitivity performance and general feasibility. Our results show that a coating of Polytetrafluoroethylene (PTFE) provides the highest sensitivity, in terms of wavelength shift per unit change in depth. This sensitivity can be further augmented by introducing modulations in the grating, such as chirp or apodization. We find that apodized PTFE-coated gratings are most suitable for our application, and report a peak sensitivity of 24.54 pm/m. The choice of an optimum coating is critical not only for the sensitivity, but also for parameters such as operating lifetime, robustness and linearity. Our results are anticipated to pave the way to more sensitive, flexible and precise optical sensors for underwater depth gauges.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
As the scientific exploration and comprehension of the marine environment becomes more concerted, the demand for sensors to accurately and precisely perceive minute changes in essential ocean parameters like temperature and depth, escalates (Heidemann et al. 2012). The advent of fiber-optic sensors has been a noteworthy development in this regard, given their numerous advantages such as high sensitivity, speed of response, compactness, robustness and flexibility (Duraibabu et al. 2017a; Marra et al. 2018; Bai et al. 2019). The sensing aspect of optical fibres can be greatly augmented by incorporating a periodic modulation in the refractive index of the core of a standard Single Mode Fibre (SMF), termed a Fibre Bragg Grating (FBG). The following paragraph takes a brief look at their various applications in sensing, communications and applied physics.
An FBG has a specific wavelength which is reflected, while the rest of the spectrum is transmitted. The reflected, or Bragg, wavelength, depends on the refractive index of the grating, n and its period, Λ.
This Bragg wavelength has been found to vary significantly with both temperature and strain, as given by
where pe is the photoelastic coefficient, s the applied strain, αλ the coefficient of thermal expansion, αn the thermo-optic coefficient and ∆T the change in ambient temperature. The ratio of the shift in the reflected wavelength to the variation in the quantity being detected, is known as the sensitivity of the sensor.
These characteristics have led to the conception of sensors for several applications, including temperature (Zhang and Kahrizi 2007; Mihailov 2012), strain (Fasano et al. 2016; Kang et al. 2007), pressure (Urban et al. 2010; Sheng et al. 2004), vibration (Li et al. 2017; Guo et al. 2008), sound (Rosenthal et al. 2011; Tsuda et al. 2009), structural health (Palumbo et al. 2019), humidity (Woyessa et al. 2016b) and biochemicals (Zhang et al. 2012). Apart from these, FBGs also play a role in optical fibre communication networks, as add-drop multiplexers and notch filters, due to their reflecting property of a narrow band of wavelengths. They have been used as a reflector in fiber lasers for high-power operation (Xiao et al. 2012).
The application of interest in this work is pressure sensing using a uniform FBG sensor inscribed in a standard SMF. This concept is implemented to conceptualize a novel application, depth sensing. As of date, commercial depth gauges employ a piezoelectric transducer, wherein a crystal, such as quartz, when subjected to an increase in pressure, gives an electrical response. Though this device has a satisfactory frequency response, the output obtained is very low and requires substantial external circuitry. Moreover, the crystal itself is susceptible to dissolution in humid conditions, or underwater. Another common technique in this regard is Sound Navigation and Ranging (SONAR), which is widely used to estimate the absolute depth by sending a sound pulse and measuring the time taken for it to echo back. However, it is unable to measure the depth at an arbitrary, intermediate location in the ocean. In view of the relative advantages mentioned above, we can thus conclude that fibre-optic sensors present a feasible alternative.
Next we present a brief summary of significant advances in fibre-optic pressure sensors in recent years. The exceptional strain sensitivity of FBGs has led to experiments with other mechanical parameters, including force and pressure, paving the path to their adoption in industry (Qiao et al. 2017). FBGs have also been implemented in polymer optical fibres, to provide better robustness. Peak strain sensitivity of 0.76 pm/µs (Woyessa et al. 2016a) and peak stress sensitivity of 0.26 pm/kPa (Pospori et al. 2017) have been reported in a poly(methylmethacrylate) (PMMA) fibre.
Other pressure sensing schemes using optical fibres have also been described in literature, imparting exceptional sensitivity. Sensors to detect low pressures have been deemed suitable for chemical and medical applications. For instance, a Fabry–Perot pressure sensor delivered a sensitivity of 1.41 µm/kPa (Eom et al. 2015). Design considerations of such sensors have been deliberated on in Go et al. (2017). Also, a multiparameter sensor for measuring pressure, thermal conductivity, refractive index and temperature was proposed in Pevec and Donlagic (2017).
Fibre-optic sensors have also been used for depth sensing in previous works. Simultaneous sensing of underwater depth and temperature using both a Fabry–Perot Interferometer (FPI) and an FBG sensor was put forward in Duraibabu et al. (2017b). However, the FBG sensed only temperature and pressure was detected solely by the FPI, thereby achieving a peak sensitivity of 15 nm/kPa. A Conductivity-Temperature-Depth (CTD) sensor based on a microfibre coupler was described in Yu et al. (2018), reaching a much higher sensitivity than a typical FBG, of 169 pm/MPa.
The discussion about sensitivity brings us to the need of a protective and performance-enhancing layer of coating material on the sensor. In a recent detailed analysis of the effect of various materials on the temperature sensitivity of an FBG (Mishra et al. 2016), it was evident that a suitable coating material was instrumental in increasing the sensitivity by up to 114%.
Here we simulate an FBG sensor, considering ocean depth as the parameter to be sensed. The simulation setup and the defined and assumed parameter values are specified in Sect. 2. We then investigate the increase in sensitivity imparted by different materials acting as the coating in Sect. 3, and conclude by deriving our interpretations from these results and suggesting directions for future research.
2 Methods
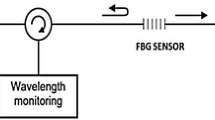
The simulation is performed in the software VPIphotonics Design Suite. The designed schematic is shown in Fig. 1. Light from an LED source with a peak frequency of 193.1 THz (corresponding to a wavelength of 1.553 µm) is passed through a 1 m long Single Mode Fibre (SMF), which contains a Fibre Bragg Grating (FBG) inscribed in the middle of it. The initial parameters of the LED, SMF and FBG are described in Tables 1, 2 and 3 respectively. The frequency with the least power component, and hence peak reflected wavelength, of the FBG is then extracted from its transmitted spectrum. This is plotted against the depth, as explained below, to calculate the sensitivity.

Overview of the simulation schematic
Underwater depth has been expressed as a measure of pressure, a quantity which can be directly measured by an FBG by the familiar equation:
where D is depth, P the pressure, ρ the underwater density and g gravitational acceleration. A major assumption in our work is that of constant ambient refractive index. Hence, the change in reflected wavelength takes place purely due to variation in the grating period as a result of the applied pressure as given by:
where ∆Λ is the change in grating period, ∆P the difference in pressure, µ Poisson’s ratio, pe photoelastic coefficient and Y the Young’s modulus. Three parameters, namely the Poisson’s ratio, photoelastic coefficient and Young’s modulus are found to be dependent on the material applied as the coating. Understandably, the coating material has the potential to affect the sensitivity significantly. The resultant shift in reflected wavelength, as a function of depth, can be written as:
where ∆D is the change in depth.
Therefore, the sensitivity can be calculated as the shift in wavelength per unit depth.
where S denotes the sensitivity. The refractive index is taken to be 1.451, density of seawater as 1029 kg/m3 and gravitational acceleration as 9.807 m/s2.
Having applied the above formulae and parameters in the simulation schematic, we take a look at the sensitivity obtained for different choices of coating materials in the succeeding section. Five materials have been considered: Along with Silica (SiO2), we have selected three metals Indium (In), Aluminium (Al) and Zinc (Zn), and a polymer, Polytetrafluoroethylene (PTFE). The material-dependent parameters of each of these have been tabulated in Table 4.
3 Results
In this section, we discuss the effect of the above materials on the sensitivity of the FBG sensor. Next, we select PTFE as the material with the highest sensitivity. This is concurrent with our hypothesis, as from Eq. (6), the sensitivity is inversely proportional to the Young’s Modulus of the material, as is generally the case with polymers. We implement chirp and apodization functions for varying grating lengths in a PTFE-coated fibre. The results are interpreted as below.
In our simulation, we consider a 1500 m-deep uniform ocean profile. The overall sensitivity is estimated by sweeping the depth over 1500 m and calculating the rate of wavelength change in this range. For viewing the transmitted spectra, especially the shift in frequency, we choose three stationary points 150 m, 600 m and 1200 m in the epipelagic, mesopelagic and bathypelagic (sunlight, twilight and midnight) ocean zones respectively.
Figure 2 shows the transmitted spectra for silica, indium, aluminium and zinc coatings at a depth of 150 m. It can be seen that, of the four, indium experiences the greatest shift, while the performance of aluminium and zinc is only slightly better than that of silica. In fact, while a conventional FBG’s response is shifted by 3.125 GHz from the peak frequency of 193.1 THz (a change of 0.0016%), the response of an indium-coated FBG can be shifted up to 41.25 GHz (a 0.0213% change, 13 times better than silica).

Transmission spectra at depth = 150 m
In Fig. 3, the output obtained 600 m deep is presented. The result is expectedly similar to that of Fig. 2, with the frequency shift of an indium-coated FBG far exceeding that of other materials. The discrepancy between aluminium and silica is more evident (a change of 0.0032% as compared to 0.002%). The magnitude of shift due to indium, however, reduces to 10.5 times that due to silica.

Transmission spectra at depth = 600 m
As the depth increases to 1200 m (see Fig. 4), the indium-coated FBG witnesses quite a significant frequency shift, of 82.1875 GHz. In contrast, the deviation in the reflected frequency of silica is a mere 4.375 GHz, a value nearly 18.8 times less pronounced than that achieved by an indium coating.
Now, we investigate the effect of a polymer coating, such as PTFE. We find that the sampling bandwidth of 16 GHz specified for the optical signal analyzer in the parameter settings is not sufficient to record the reflected wavelength of PTFE at all depths in the preferred range. We therefore increase the sampling bandwidth to 512 GHz and plot the frequency response of PTFE-coated FBG at the depths of 150 m, 600 m and 1200 m, as shown in Fig. 5. The dips in the spectra are at a difference of 0.21 THz, 0.89 THz and 1.78 THz respectively, from the reference of 193.1 THz. This is a change of 0.11%, 0.46% and 0.92% and 69, 230 and 418 times that of the standard silica FBG. Thus, we can conclude that, among the materials under consideration, PTFE is the optimal coating material, as long as the signal analyzer used has sufficient bandwidth. If under this constraint, the use of indium is the next preferred option.

Transmission spectra at depth = 1200 m

Response of PTFE-coated FBG at different depths
Figure 6 compares the sensitivity values obtained by coating different materials on the FBG. It is evident that the sensitivity conferred by PTFE far exceeds those of the metals, a closer look at which is taken in the inset. Although the PTFE graph experiences a slight nonlinearity in the region of 60–180 m, the sensitivity can be approximated to be 11.8 pm/m. The sensitivities of silica, indium, aluminium and zinc, on the other hand, are 0.067 pm/m, 0.967 pm/m, 0.133 pm/m and 0.067 pm/m respectively. The sensitivities of silica and zinc are similar, while a lower value of Young’s modulus and a higher Poisson’s ratio enable indium to achieve the highest sensitivity among the metals.

Comparison of sensitivities of different materials. Inset: expanded view of metal sensitivities
Having established PTFE as the material of choice, we investigate whether the sensitivity reported can be further enhanced. This can be done by introducing refractive index modulation such as chirp and apodization functions in the grating structure. The chirp rate, C, is varied from 0.1 to 2 nm/mm, and the effect of these changes is analyzed at different grating lengths of 10, 20, 30 and 50 cm.
We start by looking at chirp rates, maintaining the coating of PTFE and the grating length at 10 cm (see Fig. 7). The difference in sensitivities is not obvious over a wide range, hence we focus on a depth of 600–800 m. Interestingly, the optimal grating chirp rate is not at one of the extremities, namely 0.1 nm/mm or 2 nm/mm, but rather lies at 1.5 nm/mm. The sensitivity thereby achieved is 23.33 pm/m, which is an improvement of 197.74% over the uniform PTFE-coated FBG.

Chirped gratings of length = 10 cm
On increasing the length to 20 cm, in Fig. 8, other interesting effects can be observed. There is a notable nonlinearity in the graph of chirp rate = 1.5. The sensitivity of the optimal rate in the previous case, is found to lag behind. The highest sensitivity is attained at a chirp rate of 1 nm/mm, reaching a similar value of 23.33 pm/m. The main inference we can draw from these two graphs is that the most suitable chirp rate is a function of grating length.
In a longer grating of 30 cm, as depicted in Fig. 9, further significant changes can be witnessed. The optimal chirp rate shifts to the minimum value of 0.1 nm/mm. The sensitivity is found to decrease with chirp rate. There is a slight increase in the sensitivity up to 25.71 pm/m. On further increase in length to 50 cm, in Fig. 10, we see a nonlinearity for a chirp rate of 2 nm/mm that results in a higher slope at depths of 675–775 m, but the chirp rate of 0.1 nm/mm persists as the most stable and sensitive value, although there is no noticeable increase in the value of sensitivity.

Chirped gratings of length = 20 cm

Chirped gratings of length = 30 cm

Chirped gratings of length = 50 cm
We conclude, from these results, that the chirp rate has a more visible effect on the sensitivity than the grating length. However, the sensitivity of a particular chirp rate itself is negatively affected by the length. The choice of an ideal chirp rate can have the radical effect of doubling the sensitivity of the FBG.
Next, the question arises whether apodization of the grating will have a more significant effect on the performance. We apply a Blackman apodization profile to the grating keeping the length at 10 cm, in accordance with the equation:
where a0 = 0.42, a1 = 0.5, a2 = 0.08, so selected as to reduce the third and fourth sidelobes of the function to zero. We compare this with a uniform grating and an FBG chirped at 0.1 nm/mm of the same lengths and coating in Fig. 11.

Effects of chirping and apodization on sensitivity
It can be seen that the difference between the sensitivities of apodized and chirped gratings is very less. However, the apodized grating has a more stable, linear response, resulting in a sensitivity of 24.54 pm/m. This is only a slight increase from that of the chirped grating, but a much improved performance in contrast to the uniform case. On a final note, the maximum sensitivity achieved is 24.54 pm/m, as a result of Blackman apodization on a PTFE-coated FBG. This is an improvement of more than 366 times than the uniform silica-coated FBG, and a maximum deviation of 4.44 THz from the center frequency of 193.1 THz, which is a change of 2.23%.
4 Discussion
The achieved sensitivity, in terms of pressure, can be approximated as 2.44 nm/MPa, which is enhanced by around 14 times compared to previous works cited in Sect. 1 (see Table 5).
Two of the key parameters while designing a sensor are its dynamic range and resolution, apart from accuracy. In this work, we have simulated a depth sensor for a range of 0–1500 m, suitable for shallow water applications. The sensitivity was measured to be 24.54 pm/m, with a detector of resolution 0.02 pm. Thus, we obtain a depth resolution of 0.8 mm. This is superior to the contemporary CTD sensors, which can resolve depth up to 1 cm. However, practical photodiodes have a typical resolving limit of 0.5 pm. This will bring the sensor resolution to 2 cm, which is still sufficient for a majority of oceanographic applications.
The dynamic range of a sensor is defined as the ratio of the largest and smallest values it can measure. In this paper, the dynamic range of the simulated sensor will therefore be \(= 10\log \left( {\frac{1500}{{0.8 \times 10^{ - 3} }}} \right) = 62.73\) dB. However, in a realistic scenario, the dynamic range will depend to a great extent on the receiver’s resolution.
FBGs can theoretically withstand sufficiently high pressures corresponding to depths of up to 7000 m (Mihailov 2012; Wei et al. 2008). However, deployment of the sensing apparatus to such great depths is a challenging engineering task. In literature, an FBG pressure sensor has been shown to operate successfully at a pressure equivalent to that present 20 m underwater, from which depth can be transduced (Sengupta et al. 2012). Lab models of FBG liquid level sensors with ranges up to 200 cm (Vorathin et al. 2019a) and 100 cm (Ameen et al. 2016; Vorathin et al. 2019b) have been proposed. This is the first work, to the best of our knowledge, that considers depths significant for naval and oceanographic purposes. But, further progress in optical sensing technologies is essential for the deployment of fibre-optic sensors at depths greater than 10 m (Kumari et al. 2019).
Also, a critical parameter in the practical evaluation of FBG sensitivity is temperature and the cross-sensitivity towards it. As mentioned in Sect. 1, an FBG sensor is susceptible to variations induced by both temperature and strain. In the discussion thus far, we have maintained the temperature at a fixed value. But, on varying it from 293 to 298 K (20–25 °C), and maintaining zero depth, we still witness a frequency shift as shown in Fig. 12. This deviation is undesirable and directly proportional to the change in temperature as well as the Coefficient of Thermal Expansion (CTE). The CTE values of the evaluated materials are listed in Table 6.

Transmitted spectra for temperature change from 293 to 303 K
Evidently, the similar CTE values of silica and indium result in a satisfactorily low temperature interference, with a shift of less than 3 GHz. The CTEs of aluminium and zinc are also very close, resulting in a frequency shift of nearly 25 GHz. However, PTFE, which gave the best depth sensitivity, also suffers from high temperature cross-sensitivity, experiencing a deviation of 155 GHz from the centre frequency of 193.1 THz.
In Fig. 13, we plot the temperature cross-sensitivities of the five selected materials when the temperature is swept from 293 to 303 K (20–30 °C).

Temperature sensitivities of selected materials
As Table 6 suggests, PTFE has a far higher sensitivity of 0.5 nm/K, whereas the temperature sensitivities of silica, indium, aluminium and zinc are 2 pm/K, 8 pm/K, 70 pm/K and 80 pm/K respectively. Comparing with Fig. 6, we see that for all materials, especially PTFE, the temperature sensitivity is much greater than the depth sensitivity. This may be a major hindrance in the sensor calibration if not rectified instantly.
In this regard, we present a schematic, shown in Fig. 14, similar to an interferometer, consisting of two identical FBGs. Only one of them (Fibre Bragg Grating 1) is sensitive to depth changes, while both are equally susceptible to fluctuations in temperature. A similar schematic was described for an FBG accelerometer in Parida et al. (2019) for temperature self-compensation. The difference of the peak reflected wavelengths in these two cases gives us the wavelength shift due to depth alone. With the help of Eq. (5), we can calculate the depth with far greater accuracy.

Schematic for temperature compensation
Figure 15 shows the result of the temperature compensation operation on two identical PTFE-coated FBGs for a temperature range of 293 to 303 K. The uncompensated FBG shows huge temperature sensitivity, whereas the compensation setup works ideally, with no change due to temperature from 293 to 296 K, but from 296 K onwards, a slight drop with a slope of nm/K is experienced. The exact cause of this discrepancy is as of yet unestablished, but it is hypothesized to be as a result of random attenuation and dispersion losses in the fibre. The negative sensitivity indicates that these losses primarily occur in Fibre Bragg Grating 1, making it appear less sensitive to the same temperature conditions. As mentioned before, the effect of pressure cross-sensitivity in this case, cannot be neglected.

Temperature sensitivity of PTFE-coated FBG before and after compensation
It has to be noted that the list of materials considered in this work is not exhaustive, but only provides an overview of the paramount properties to be considered while selecting a coating for high-sensitivity sensing applications. The environment in which the sensor has to operate can also vary substantially with the application and plays an important role in deciding the optimal coating.
In this work, we have selected underwater depth as the only parameter to be sensed, but it is possible to design a CTD (Conductivity-Temperature-Depth) sensor using a coated FBG. Future research will focus on these prospects. Such optical sensors can also double up as acoustic transducers, gauging the slight discrepancies in pressure due to the disturbance caused by sound waves. Altogether, we can safely surmise that Fibre Bragg Grating-based sensors have the potential to help us gain a new insight into the mysteries of the underwater world.
References
Ameen, O.F., et al.: Graphene diaphragm integrated FBG sensors for simultaneous measurement of water level and temperature. Sens. Actuators A: Phys. 252, 225–232 (2016)
Bai, X., Hu, M., Gang, T., Tian, Q.: An ultrasonic sensor composed of a fibre Bragg grating with an air bubble for underwater object detection. Opt. Laser Technol. 112, 467–472 (2019)
Duraibabu, D.B., et al.: An optical fibre depth (pressure) sensor for remote operated vehicles in underwater applications. Sensors 17, 1–12 (2017a)
Duraibabu, D.B., et al.: Underwater depth and temperature sensing based on fibre optic technology for marine and fresh water applications. Sensors 17, 1–12 (2017b)
Eom, J., et al.: Fibre optic fabry–perot pressure sensor based on lensed fibre and polymeric diaphragm. Sens. Actuator A: Phys. 225, 25–32 (2015)
Fasano, A., et al.: Fabrication and characterization of polycarbonate microstructured polymer optical fibres for high-temperature-resistant fibre Bragg grating strain sensors. Opt. Mater. Exp. 6, 649–659 (2016)
Go, S.A., et al.: Design considerations of a fibre optic pressure sensor protective housing for intramuscular pressure measurements. Ann. Biomed. Eng. 45, 739–746 (2017)
Guo, T., Ivanov, A., Chen, C., Albert, J.: Temperature-independent tilted fibre grating vibration sensor based on cladding-core recoupling. Opt. Lett. 33, 1004–1006 (2008)
Heidemann, J., Stojanovic, M., Zorzi, M.: Underwater sensor networks: applications, advances and challenges. Philos. Trans. R. Soc. A. 370, 158–175 (2012)
Kang, L., Kim, D., Han, J.: Estimation of dynamic structural displacements using fibre Bragg grating strain sensors. J. Sound Vib. 305, 534–542 (2007)
Kumari, C.R.U., Samiappan, D., Kumar, R., Sudhakar, T.: Fibre optic sensors in ocean observation: a comprehensive review. Optik 179, 351–360 (2019)
Li, T., et al.: A diaphragm type fibre Bragg grating vibration sensor based on transverse property of optical fibre with temperature compensation. IEEE Sens. J. 27, 1021–1029 (2017)
Marra, G., et al.: Ultrastable laser interferometry for earthquake detection with terrestrial and submarine cables. Science 361, 486–490 (2018)
Mihailov, S.: Fibre Bragg grating sensors for harsh environments. Sensors 12, 1898–1918 (2012)
Mishra, V., Lohar, M., Amphawan, A.: Improvement in temperature sensitivity of FBG by coating of different materials. Optik 127, 825–828 (2016)
Palumbo, G., et al.: Fibre Bragg grating sensors for real time monitoring of early age curing and shrinkage of different metakolin-based inorganic binders. IEEE Sens. J. 19, 6173–6180 (2019)
Parida, O.P., Nayak, J., Asokan, S.: Design and validation of a novel high-sensitivity self-temperature compensated fibre Bragg grating accelerometer. IEEE Sens. J. 19, 6197–6204 (2019)
Pevec, S., Donlagic, D.: Multiparameter fibre-optic sensor for simultaneous measurement of thermal conductivity, pressure, refractive index, and temperature. IEEE Photon. J. 9, 1–14 (2017)
Pospori, A., et al.: Thermal and chemical treatment of polymer optical fibre Bragg grating sensors for enhanced mechanical sensitivity. Opt. Fiber Technol. 36, 68–74 (2017)
Qiao, X., Shao, Z., Bao, W., Rong, Q.: Fibre Bragg grating sensors for the oil industry. Sensors 17, 1–34 (2017)
Rosenthal, A., Razansky, D., Ntziachristos, V.: High-sensitivity compact ultrasonic detector based on a pi-phase-shifted fibre Bragg grating. Opt. Lett. 36, 1833–1835 (2011)
Sengupta, D., Shankar, M.S., Reddy, P.S., Prasad, R.S., Srimannarayana, K.: Sensing of hydrostatic pressure using FBG sensor for liquid level measurement. Microw. Opt. Technol. Lett. 54, 1679–1683 (2012)
Sheng, H., Fu, M., Chen, T., Liu, W., Bor, S.: A lateral pressure sensor using a fibre Bragg grating. IEEE Photon. Technol. Lett. 17, 1146–1148 (2004)
Tsuda, H., et al.: Acoustic emission measurement using a strain-insensitive fibre Bragg grating sensor under varying load conditions. Opt. Lett. 34, 2942–2944 (2009)
Urban, F., Kadlec, J., Vlach, R., Kuchta, R.: Design of a pressure sensor based on optical fibre Bragg grating lateral deformation. Sensors 10, 11212–11225 (2010)
Vorathin, E., Hafizi, Z.M., Aizzuddin, A.M., Zaini, M.A.K., Lim, K.S.: A novel temperature-insensitive hydrostatic liquid-level sensor using chirped FBG. IEEE Sens. J. 19, 157–162 (2019a)
Vorathin, E., et al.: FBG water-level transducer based on PVC-cantilever and rubber diaphragm structure. IEEE Sens. J. 19, 7407–7414 (2019b)
Wei, Z., Song, D., Zhao, Q., Cui, H.: High pressure sensor based on fibre Bragg grating and carbon fibre laminated composite. IEEE Sens. J. 8, 1615–1619 (2008)
Woyessa, G., et al.: Single mode step-index polymer optical fibre for humidity insensitive high temperature fibre Bragg grating sensors. Opt. Exp. 24, 1253–1260 (2016a)
Woyessa, G., Nielsen, K., Stefani, A., Markos, C., Bang, O.: Temperature insensitive hysteresis free highly sensitive polymer optical fibre Bragg grating humidity sensor. Opt. Exp. 24, 1206–1213 (2016b)
Xiao, Y., et al.: 1-kilowatt CW all-fibre laser oscillator pumped with wavelength-beam-combined diode stacks. Opt. Exp. 20, 3296–3301 (2012)
Yu, Y., et al.: High sensitivity all optical fibre conductivity-temperature-depth (CTD) sensing based on an optical microfibre coupler (OMC). J. Lightwave Technol. 37, 2739–2747 (2018)
Zhang, B., Kahrizi, M.: High-temperature resistance fibre Bragg grating temperature sensor fabrication. IEEE Sens. J. 7, 586–591 (2007)
Zhang, W., Webb, D., Peng, G.: Polymer optical fibre Bragg grating acting as an intrinsic biochemical concentration sensor. Opt. Lett. 37, 1370–1372 (2012)
Acknowledgements
This work was supported by the Naval Research Board, Defense Research and Development Organization, India (Grant Number: NRB-405/OEP/17-18).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Chakravartula, V., Samiappan, D. & Kumar, R. Sensitivity enhancement analysis due to different coating materials of Fibre Bragg Grating-based depth sensor for underwater applications. Opt Quant Electron 52, 27 (2020). https://doi.org/10.1007/s11082-019-2144-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-019-2144-x