
Abstract
This paper examines the effectiveness of two newly developed algorithms called the exponential rational function and modified simple equation methods in exactly solving a well-known nonlinear system of partial differential equations. In this respect, the Wu–Zhang system which describes (1 + 1)-dimensional dispersive long wave is considered, and as an achievement, a series of exact traveling wave solutions for the aforementioned system are formally extracted.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
There are many nonlinear physical phenomena in nature that are described by nonlinear systems of partial differential equations. Nowadays, with rapid development of symbolic computation systems, the search for the exact solutions of nonlinear systems of PDEs has attracted a lot of attention; because the exact solutions make it possible to explore nonlinear physical phenomena comprehensively and facilitate testing the numerical schemes. During recent years, a variety of approaches have been proposed and applied to the nonlinear systems of PDEs, such as modified extended tanh function method (Soliman 2006; Abdou and Soliman 2006), first integral method (Lu et al. 2010; Hosseini et al. 2012, 2014), extended tanh function method (Wazwaz 2007; Bekir 2008; Abdou 2007; Shukri and Al-Khaled 2010), exp-function method (Zhang and Zhang 2011; Biazar and Ayati 2012), and so on.
Exponential rational function method is one of the robust techniques to look for the exact solutions of nonlinear partial differential equations that has received special interest owing to its fairly great performance. For example, Bekir and Kaplan (2016) explored new exact solutions of the scalar Qiao equation and the Kuramoto–Sivashinsky equation using the exponential rational function method. Kaplan and Hosseini (2017) adopted the exponential rational function method to obtain analytical solutions of the Tzitzéica type nonlinear evolution equations. Mohyud-Din and Bibi (2017) found the exact solutions of three nonlinear fractional differential equations named the space–time fractional Boussinesq, SRLW, and (2 + 1)-dimensional breaking soliton equations using the exponential rational function method.
Modified simple equation method is also another of well-designed techniques to find the exact solutions of nonlinear PDEs. This method has been widely used by many researchers to search the exact solutions of nonlinear partial differential equations. For instance, Jawad et al. (2010) implemented the modified simple equation method for obtaining the exact solutions of the Fitzhugh–Nagumo and Sharma–Tasso–Olver equations. Zayed (2011) tried to show the performance of modified simple equation method in driving new 1-soliton solutions of Sharma–Tasso–Olver equation. Taghizadeh et al. (2012) constructed the exact solutions of the modified equal width, Fisher, Telegraph, and Cahn–Allen equations using the modified simple equation method.
As the next step of this study, the exponential rational function and modified simple equation methods are utilized to seek a series of exact traveling wave solutions of Wu–Zhang system (Zheng et al. 2003; Mirzazadeh et al. 2017; Inc et al. 2016)
which describes (1 + 1)-dimensional dispersive long wave in two horizontal directions on shallow waters. Several approaches were adopted to solve the Wu–Zhang system, analytically. For instance, Zheng et al. (2003) employed the generalized extended tanh-function method for constructing the exact solutions of Wu–Zhang system. Using the extended trial equation method, Mirzazadeh et al. (2017) extracted the solitary wave, shock wave, and singular solitary wave solutions of Wu–Zhang system. Inc et al. (2016) employed the extended tanh and Hirota methods to establish the singular solitary wave, periodic, and multi soliton solutions of Wu–Zhang system. Interested readers can see (Eslami and Rezazadeh 2016; Younis 2014, 2017; Kaplan et al. 2015; Zayed et al. 2016; Ayati et al. 2015; Hosseini and Gholamin 2015; Ayati et al. 2017; Hosseini et al. 2017a, b; Hosseini and Ansari 2017; Demiray and Bulut 2015; Korkmaz 2017; Sardar et al. 2015; Ali et al. 2015; Cheemaa and Younis 2016a, b; Younis et al. 2017; Arnous et al. 2017; Younis and Rizvi 2016; Afzal et al. 2017; Tariq and Younis 2017; Ashraf et al. 2017; Pandir 2014a, b; Bulut et al. 2014; Demiray et al. 2015, 2016; Tuluce Demiray et al. 2015) as well.
2 Methodologies
Suppose that a nonlinear system of partial differential equations is presented as
where u and v are unknown functions and F 1 and F 2 are polynomials in u, v and their derivatives.
System (1) is reduced to the following nonlinear system of ordinary differential equations
through the transformations
where the prime denotes the derivation with respect to ξ.
Now, using some mathematical operations, the system (2) is converted to a nonlinear ordinary differential equation as follows
2.1 Exponential rational function method
According to the exponential rational function method, assume that the solution of Eq. (3) can be written as
where a n (0 ≤ n ≤ m) are constants that must be determined later.
By computing the integer m, setting it in Eq. (4), and then substituting the resulting relation into Eq. (3), we arrive at
which P is a polynomial in e ξ. Equating each coefficient of this polynomial to zero yields a set of nonlinear algebraic equations for a n (0 ≤ n ≤ m) and c. Finally, solving the system of equations provides a series of exact traveling wave solutions for the system (1).
2.2 Modified simple equation method
According to the modified simple equation method, suppose that the solution of Eq. (3) can be presented by a polynomial in (ϑ ′(ξ)/ϑ(ξ)) as
Here m is a positive integer that can be determined by the homogeneous balance principle and a n (0 ≤ n ≤ m) are constants to be computed.
By setting Eq. (5) in LHS of Eq. (3), a polynomial in ϑ(ξ) and its derivatives is derived. Thereafter, a nonlinear system that must be solved to find a n (0 ≤ n ≤ m), c and ϑ(ξ) is produced; by equating the coefficient of each power of ϑ(ξ) to zero. Finally, by substituting a n (0 ≤ n ≤ m), c and ϑ(ξ) into Eq. (5), a number of exact traveling wave solutions for the system (1) is generated.
It should be mentioned that in the modified simple equation method, the function ϑ(ξ) is not a pre-defined function or not a solution of any pre-defined equation; on the contrary, the tanh-function method, (G ′/G)-expansion method, and so on. It can be considered as the main advantage of the modified simple equation method over above approaches.
3 Application
In this section, the usefulness of the exponential rational function and modified simple equation methods in exactly solving the Wu–Zhang system, describing (1 + 1)-dimensional dispersive long wave is demonstrated. To this end, using the transformations \(u\left( {x,t} \right) = f\left( { \xi } \right)\) and \(v\left( {x,t} \right) = g\left( { \xi } \right)\) where ξ = x − ct, the Wu–Zhang system is changed into the following system of nonlinear ordinary differential equations
Integrating the first equation once yields
where the integration constant is taken to be zero. Now, by substituting Eq. (7) into (6-2), we obtain
Integrating of above equation once, finally results in
where the integration constant is considered to be zero.
3.1 Applying the exponential rational function method
By balancing the derivative term u″ with the nonlinear term u 3, we find the balancing number as \(m = 1\). Therefore, one can try to seek a solution in the form
Substituting Eq. (9) into Eq. (8) and equating all the coefficients of e nξ (\(n = 0,1,2,3\)) to zero, gives the following set of nonlinear algebraic equations
Solving this system of equations yields the following cases:
Case 1
Now, by substituting above values into Eq. (9) and using some mathematical operations, we will obtain the following exact traveling wave solutions for the Wu–Zhang system
Case 2
Now, by setting above values in Eq. (9) and using some mathematical operations, we will derive the following exact traveling wave solutions for the Wu–Zhang system
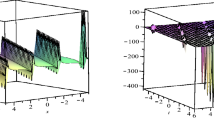
Figure 1 shows the dynamic behavior of third solution generated using the exponential rational function method.

a The 3D graph of u 3(x, t) when − 10 ≤ x ≤ 10 and 0 ≤ t ≤ 5. b The 3D graph of v 3(x, t) when − 10 ≤ x ≤ 10 and 0 ≤ t ≤ 5
3.2 Applying the modified simple equation method
Since the balancing number is equal to unity, therefore, we look for a solution as below
Inserting Eq. (10) in Eq. (8) and equating all the coefficients of ϑ n(ξ) (\(n = 0,1,2,3\)) to zero, results in the following system of nonlinear equations
Now, the following cases can be considered:
Case 1 Solving the first and last equations, results in
By substituting these values into the second and third equations, and then solving the resulting system, we obtain
where C 1 and C 2 are two arbitrary constants.
Now, by using some mathematical operations, we will obtain the following exact traveling wave solutions for the Wu–Zhang system
Case 2 Solving the first and last equations, yields
By setting above values into the second and third equations, and then solving the resulting system, we gain
where C 1 and C 2 are two arbitrary constants.
Now, by using some mathematical operations, we will derive the following exact traveling wave solutions for the Wu–Zhang system
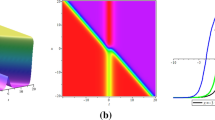
Figure 2 illustrates the dynamic behavior of third solution produced using the modified simple equation method.

a The 3D graph of u 3(x, t) for C 1 = 1, C 2 = 1, and c = 1 when − 10 ≤ x ≤ 10 and 0 ≤ t ≤ 5. b The 3D graph of v 3(x, t) for C 1 = 1, C 2 = 1, and c = 1 when − 10 ≤ x ≤ 10 and 0 ≤ t ≤ 5
4 Conclusion
In this paper, the Wu–Zhang system which describes (1 + 1)-dimensional dispersive long was successfully studied. Mentioned task was accomplished by adopting the exponential rational function and modified simple equation methods to generate a series of exact traveling wave solutions. Some graphical figures were also portrayed to demonstrate the dynamic behavior of extracted solutions. The observations confirm that above methods are efficient algorithms for analytic treatment of a wide range of nonlinear systems of PDEs.
References
Abdou, M.A.: The extended tanh method and its applications for solving nonlinear physical models. Appl. Math. Comput. 190, 988–996 (2007)
Abdou, M.A., Soliman, A.A.: Modified extended tanh-function method and its application on nonlinear physical equations. Phys. Lett. A 353, 487–492 (2006)
Afzal, S.S., Younis, M., Rizvi, S.T.R.: Optical dark and dark-singular solitons with anti-cubic nonlinearity. Optik 147, 27–31 (2017)
Ali, S., Rizvi, S.T.R., Younis, M.: Traveling wave solutions for nonlinear dispersive water-wave systems with time-dependent coefficients. Nonlinear Dyn. 82, 1755–1762 (2015)
Arnous, A.H., Mahmood, S.A., Younis, M.: Dynamics of optical solitons in dual-core fibers via two integration schemes. Superlattice Microstruct. 106, 156–162 (2017)
Ashraf, R., Ahmad, M.O., Younis, M., Ali, K., Rizvi, S.T.R.: Dipole and Gausson soliton for ultrashort laser pulse with high order dispersion. Superlattice Microstruct. 109, 504–510 (2017)
Ayati, Z., Moradi, M., Mirzazadeh, M.: Application of modified simple equation method to Burgers, Huxley and Burgers–Huxley equations. Iran. J. Numer. Anal. Optim. 5, 59–73 (2015)
Ayati, Z., Hosseini, K., Mirzazadeh, M.: Application of Kudryashov and functional variable methods to the strain wave equation in microstructured solids. Nonlinear Eng. 6, 25–29 (2017)
Bekir, A.: Applications of the extended tanh method for coupled nonlinear evolution equations. Commun. Nonlinear Sci. Numer. Simul. 13, 1748–1757 (2008)
Bekir, A., Kaplan, M.: Exponential rational function method for solving nonlinear equations arising in various physical models. Chin. J. Phys. 54, 365–370 (2016)
Biazar, J., Ayati, Z.: Exp and modified Exp function methods for nonlinear Drinfeld–Sokolov system. J. King Saud Univ. Sci. 24, 315–318 (2012)
Bulut, H., Pandir, Y., Tuluce Demiray, S.: Exact solutions of nonlinear Schrodinger’s equation with dual power-law nonlinearity by extended trial equation method. Waves Random Complex Media 24, 439–451 (2014)
Cheemaa, N., Younis, M.: New and more exact traveling wave solutions to integrable (2 + 1)-dimensional Maccari system. Nonlinear Dyn. 83, 1395–1401 (2016a)
Cheemaa, N., Younis, M.: New and more general traveling wave solutions for nonlinear Schrödinger equation. Waves Random Complex Media 26, 84–91 (2016b)
Demiray, S.T., Bulut, H.: Some exact solutions of generalized Zakharov system. Waves Random Complex Media 25, 75–90 (2015)
Demiray, S.T., Pandir, Y., Bulut, H.: New solitary wave solutions of Maccari system. Ocean Eng. 103, 153–159 (2015)
Demiray, S.T., Pandir, Y., Bulut, H.: All exact travelling wave solutions of Hirota equation and Hirota–Maccari system. Optik 127, 1848–1859 (2016)
Eslami, M., Rezazadeh, H.: The firrst integral method for Wu–Zhang system with conformable time-fractional derivative. Calcolo 53, 475–485 (2016)
Hosseini, K., Ansari, R.: New exact solutions of nonlinear conformable time-fractional Boussinesq equations using the modified Kudryashov method. Waves Random Complex Media (2017). https://doi.org/10.1080/17455030.2017.1296983
Hosseini, K., Gholamin, P.: Feng’s first integral method for analytic treatment of two higher dimensional nonlinear partial differential equations. Differ. Equ. Dyn. Syst. 23, 317–325 (2015)
Hosseini, K., Ansari, R., Gholamin, P.: Exact solutions of some nonlinear systems of partial differential equations by using the first integral method. J. Math. Anal. Appl. 387, 807–814 (2012)
Hosseini, K., Sadeghi, F., Ansari, R.: First integral method for solving nonlinear physical systems of partial differential equations. J. Nat. Sci. Sustain. Technol. 8, 391–400 (2014)
Hosseini, K., Bekir, A., Ansari, R.: New exact solutions of the conformable time-fractional Cahn–Allen and Cahn–Hilliard equations using the modified Kudryashov method. Optik 132, 203–209 (2017a)
Hosseini, K., Mayeli, P., Ansari, R.: Modified Kudryashov method for solving the conformable time-fractional Klein–Gordon equations with quadratic and cubic nonlinearities. Optik 130, 737–742 (2017b)
Inc, M., Kilic, B., Karatas, E., Al Qurashi, M.M., Baleanu, D., Tchier, F.: On soliton solutions of the Wu–Zhang system. Open Phys. 14, 76–80 (2016)
Jawad, A.J.M., Petković, M.D., Biswas, A.: Modified simple equation method for nonlinear evolution equations. Appl. Math. Comput. 217, 869–877 (2010)
Kaplan, M., Hosseini, K.: Investigation of exact solutions for the Tzitzéica type equations in nonlinear optics. Optik (2017). https://doi.org/10.1016/j.ijleo.2017.08.116
Kaplan, M., Bekir, A., Akbulut, A., Aksoy, E.: Exact solutions of nonlinear fractional differential equations by modified simple equation method. Rom. J. Phys. 60, 1374–1383 (2015)
Korkmaz, A.: Exact solutions of space-time fractional EW and modified EW equations. Chaos, Solitons Fractals 96, 132–138 (2017)
Lu, B., Zhang, H.Q., Xie, F.D.: Travelling wave solutions of nonlinear partial equations by using the first integral method. Appl. Math. Comput. 216, 1329–1336 (2010)
Mirzazadeh, M., Ekici, M., Eslami, M., Krishnan, E.V., Kumar, S., Biswas, A.: Solitons and other solutions to Wu–Zhang system. Nonlinear Anal. Modell. Control 22, 441–458 (2017)
Mohyud-Din, S.T., Bibi, S.: Exact solutions for nonlinear fractional differential equations using exponential rational function method. Opt. Quant. Electron. 49, 64 (2017)
Pandir, Y.: New exact solutions of the generalized Zakharov–Kuznetsov modified equal-width equation. Pramana J. Phys. 82, 949–964 (2014a)
Pandir, Y.: Symmetric Fibonacci function solutions of some nonlinear partial differential equations. Appl. Math. Inf. Sci. 8, 2237–2241 (2014b)
Sardar, A., Husnine, S.M., Rizvi, S.T.R., Younis, M., Ali, K.: Multiple travelling wave solutions for electrical transmission line model. Nonlinear Dyn. 82, 1317–1324 (2015)
Shukri, S., Al-Khaled, K.: The extended tanh method for solving systems of nonlinear wave equations. Appl. Math. Comput. 217, 1997–2006 (2010)
Soliman, A.A.: The modified extended tanh-function method for solving Burgers-type equations. Phys. A 361, 394–404 (2006)
Taghizadeh, N., Mirzazadeh, M., Samiei Paghaleh, A., Vahidi, J.: Exact solutions of nonlinear evolution equations by using the modified simple equation method. Ain Shams Eng. J. 3, 321–325 (2012)
Tariq, K.U., Younis, M.: Bright, dark and other optical solitons with second order spatiotemporal dispersion. Optik 142, 446–450 (2017)
Tuluce Demiray, S., Pandir, Y., Bulut, H.: New soliton solutions for Sasa–Satsuma equation. Waves Random Complex Media 25, 417–428 (2015)
Wazwaz, A.M.: New solitary wave and periodic wave solutions to the (2 + 1)-dimensional Nizhnik–Novikov–Veselov system. Appl. Math. Comput. 187, 1584–1591 (2007)
Younis, M.: A new approach for the exact solutions of nonlinear equations of fractional order via modified simple equation method. Appl. Math. 5, 1927–1932 (2014)
Younis, M.: Optical solitons in (n + 1)-dimensions with Kerr and power law nonlinearities. Mod. Phys. Lett. B 31, 1750186 (2017)
Younis, M., Rizvi, S.T.R.: Optical soliton like pulses in ring cavity fibers of carbon nanotubes. J. Nanoelectron. Optoelectron. 11, 276–279 (2016)
Younis, M., ur Rehman, H., Rizvi, S.T.R., Mahmood, S.A.: Dark and singular optical solitons perturbation with fractional temporal evolution. Superlattice Microstruct. 104, 525–531 (2017)
Zayed, E.M.E.: A note on the modified simple equation method applied to Sharma–Tasso–Olver equation. Appl. Math. Comput. 218, 3962–3964 (2011)
Zayed, E.M.E., Amer, Y.A., Al-Nowehy, A.G.: The modified simple equation method and the multiple exp-function method for solving nonlinear fractional Sharma–Tasso–Olver equation. Acta Mathematicae Applicatae Sinica 32, 793–812 (2016)
Zhang, S., Zhang, H.Q.: An Exp-function method for new N-soliton solutions with arbitrary functions of a (2 + 1)-dimentional vcBK system. Comput. Math. Appl. 61, 1923–1930 (2011)
Zheng, X., Chen, Y., Zhang, H.: Generalized extended tanh-function method and its application to (1 + 1)-dimensional dispersive long wave equation. Phys. Lett. A 311, 145–157 (2003)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Kaplan, M., Mayeli, P. & Hosseini, K. Exact traveling wave solutions of the Wu–Zhang system describing (1 + 1)-dimensional dispersive long wave. Opt Quant Electron 49, 404 (2017). https://doi.org/10.1007/s11082-017-1231-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-017-1231-0