
Abstract
We give properties of strict pseudocontractions and demicontractions defined on a Hilbert space, which constitute wide classes of operators that arise in iterative methods for solving fixed point problems. In particular, we give necessary and sufficient conditions under which a convex combination and composition of strict pseudocontractions as well as demicontractions that share a common fixed point is again a strict pseudocontraction or a demicontraction, respectively. Moreover, we introduce a generalized relaxation of composition of demicontraction and give its properties. We“ apply these properties to prove the weak convergence of a class of algorithms that is wider than the Douglas–Rachford algorithm and projected Landweber algorithms. We have also presented two numerical examples, where we compare the behavior of the presented methods with the Douglas–Rachford method.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In the last three decades, many researchers studied the properties of averaged operators in real Hilbert spaces [2, 4, 6, 14, 15]. Here, we recall that an averaged operator T is defined as a strict convex combination of a nonexpansive operator and identity. Important examples of averaged operators in a real Hilbert space \(\mathcal {H}\) are the metric projection [4], the resolvent of a maximally monotone operator [6], the proximity operator related to a lower semi-continuous convex function [6], and the Landweber operator [13, 14]. It is well known that convex combinations as well as compositions of averaged operators are again averaged operators [4, 14, 15, 40]. This property enables construction of a wide class of averaged operators which have many applications in signal processing, image reconstruction from projections, medical imaging (in particular in computerized tomography), radiation therapy treatment planning, optics, supervised learning process, and many other areas [15, 22, 28, 48]. These problems may be modelled as common fixed point problems, split feasibility problems, or variational inequality problems. For these problems, appropriate methods employing convex combinations or compositions of averaged operators have been constructed in many papers. In the last three decades, these methods were developed in many publications and extended to algorithms employing averaged operators defined on a Hilbert space; see, e.g., [4, 6, 14,15,16, 22] and the references therein. Averaged operators T with nonempty \(\textrm{Fix}T\) have a convenient property, namely the demi-closedness principle
[41]. This yields weak convergence of algorithms employing these operators. However, the evaluation of averaged operators with a specified subset of fixed points is often not straightforward. Thus, classes of operators wider than the averaged ones that have a fixed point, namely strongly quasi-nonexpansive operators (also called strongly attracting), had to be defined [4, 12, 15, 35]. Here, we recall that an operator \(T:\mathcal {H}\rightarrow \mathcal {H}\) with nonempty \(\textrm{Fix}T\) is called \(\rho \)-strongly quasi-nonexpansive, where \(\rho \in (0,+\infty )\) if
for all \(x\in \mathcal {H}\) and all \(z\in \textrm{Fix}T\). In many cases, these operators may be evaluated in a much simpler manner than their averaged counterparts [15]. An important example of a strongly quasi-nonexpansive operator in a Hilbert space is a subgradient projection related to a lower semicontinuous convex function. Other examples include a Landweber operator related to a strongly quasi-nonexpansive operator [16, 17, 19, 51] and its extrapolation [17, 19, 33]. It turns out that convex combinations as well as compositions of strongly quasi-nonexpansive operators that share a common fixed point are again strongly quasi-nonexpansive [4, 15, 52]. Moreover, a class of strongly quasi-nonexpansive operators that share a common fixed point and satisfy the demi-closedness principle is also closed under convex combinations and compositions [20]. This property is important for the convergence properties of corresponding algorithms [20]. In the recent decade, operators from wider classes than averaged operators and quasi-nonexpansive operators, namely strict pseudocontractions and demicontractions, have been applied for solving the problems mentioned above; see, e.g., [3, 8, 9, 24, 34, 35, 37, 39, 45, 49, 50, 54]. Here, we recall that an operator \(T:\mathcal {H}\rightarrow \mathcal {H}\) with nonempty \(\textrm{Fix}T\) is called \(\alpha \)-strict pseudocontraction, where \(\alpha \in (-\infty ,1)\), if
for all \(x,y\in \mathcal {H}\) [10, Def. 1], [32]. Properties of strict pseudocontractions were studied recently in [3], where these operators were called conically averaged. If we suppose that \(\textrm{Fix}T\ne \emptyset \) and set \(y\in \textrm{Fix}T\) in (1), then we obtain the definition of an \(\alpha \)-demicontraction [32]. If \(\alpha \in (-\infty ,0)\), then T is respectively averaged or \(-\alpha \)-strongly quasi-nonexpansive. Demicontractions were also used in extrapolated versions of appropriate algorithms for the (multiple) split common fixed point problem; see, e.g., [23, 26, 31, 46, 47, 53]. Besides of a recent paper [3], other papers mentioned above do not study the properties of strict pseudocontractions and demicontractions in detail. However, these properties are important for the convergence of algorithms employing those operators, enable a simplification of proofs of convergence, and allow to apply parameters from a wider range. The aim of this paper is answering the following questions:
-
1.
Are classes of strict pseudocontractions and classes of demicontractions that share a common fixed point and satisfy the demi-closedness principle closed under convex combinations?
-
2.
Is it true (and under what conditions) that composition of strict pseudocontractions as well as composition of demicontractions that share a common fixed point and satisfy the demi-closedness principle is again a strict pseudocontraction or a demicontraction satisfying the demi-closedness principle, respectively?
-
3.
What should we suppose on operators T and U being pseudocontractions or demicontractions, on relaxation parameters \(\lambda _{k}\), \(k\ge 0\), and on extrapolation function \(\sigma :\mathcal {H} \rightarrow [ 1,+\infty )\), employed in an iterative process \(x^{k+1}=x^{k}+\lambda _{k}\sigma (x^{k})(UT(x^{k})-x^{k})\) in order to guarantee weak convergence of \(x^{k}\) to a fixed point of UT?
Answers on the part of questions 1 and 2 regarding strict pseudocontractions were recently presented in [3, Props 2.4 and 2.5]. The main results of this paper are contained in Sections 3.2 and 3.3 and in Sect. 4, where we give answers to the remaining parts of questions 1 and 2 and to question 3.
2 Preliminaries
In the whole paper, \(\mathcal {H}\) denotes a real Hilbert space with inner product \(\langle \cdot ,\cdot \rangle \) and the related norm \(\Vert \cdot \Vert \). We suppose that \(\mathcal {H}\) is nontrivial, that is \(\mathcal {H}\ne \{0\}\). For an operator \(T:\mathcal {H}\rightarrow \mathcal {H}\) and \(\lambda >0\), denote by \(T_{\lambda }:=\textrm{Id}+\lambda (T-\textrm{Id})\) the \(\lambda \)-relaxation of T, where \(\textrm{Id}\) denotes the identity operator. If \(\lambda \in (0,1)\), then \(T_{\lambda }\) is a convex combination of T and \(\textrm{Id}\). Note that \((T_{\lambda })_{\mu }=T_{\lambda \mu }\), \(\lambda ,\mu >0\). The set \(\textrm{Fix}T:=\{z\in \mathcal {H}:Tz=z\}\) is called the fixed point set, and an element of \(\textrm{Fix}T\) is called a fixed point. Below, we recall some well-known notions which we use in this paper.
Definition 2.1
We say that an operator \(T:\mathcal {H}\rightarrow \mathcal {H}\) is as follows:
-
(a)
nonexpansive (NE), if for all \(x,y\in \mathcal {H}\)
$$\begin{aligned} \Vert T(x)-T(y)\Vert \le \Vert x-y\Vert \text {;} \end{aligned}$$(2) -
(b)
\(\alpha \)-averaged (\(\alpha \)-AV), where \(\alpha \in (0,1)\), if there is an NE operator S such that
$$\begin{aligned} T=(1-\alpha )\textrm{Id}+\alpha S\text {;} \end{aligned}$$ -
(c)
firmly nonexpansive (FNE), if for all \(x,y\in \mathcal {H}\)
$$\begin{aligned} \langle T(x)-T(y),x-y\rangle \ge \Vert T(x)-T(y)\Vert ^{2}\text {;} \end{aligned}$$(3) -
(d)
\(\lambda \)-relaxed firmly nonexpansive (\(\lambda \)-RFNE), where \(\lambda >0\), if T is a \(\lambda \)-relaxation of an FNE operator;
-
(e)
an \(\alpha \)-strict pseudocontraction (\(\alpha \)-SPC), where \(\alpha \in (-\infty ,1)\), if for all \(x,y\in \mathcal {H}\)
$$\begin{aligned} \Vert T(x)-T(y)\Vert ^{2}\le \Vert x-y\Vert ^{2}+\alpha \Vert (T(x)-x)-(T(y)-y)\Vert ^{2}\text {;} \end{aligned}$$(4)
Averaged operators were introduced in [2], where many properties of these operators were presented. FNE operators were studied in [12], in [43], and in [30, Section 11]. Strict pseudocontractions were studied in [10, Def. 1] and in [32]. In [3, Def. 2.1], a \(\lambda \)-RFNE operator was called \(\Theta \)-conically averaged, where \(\Theta =\lambda /2\).
Proposition 2.2
Let \(\lambda >0\). An operator \(T:\mathcal {H}\rightarrow \mathcal {H}\) is \(\lambda \)-RFNE if and only if for all \(x,y\in \mathcal {H}\)
Proof
See [10, Th. 1] or [15, Cor. 2.2.3]. \(\square \)
Proposition 2.3
Let \(\lambda >0\). An operator \(T:\mathcal {H}\rightarrow \mathcal {H}\) is \(\lambda \)-RFNE if and only if T is an \(\alpha \)-SPC, where \(\alpha =(\lambda -2)/\lambda \in (-\infty ,1)\).
Proof
For \(\lambda \in (0,2)\), the proposition was proved in [15, Cor. 2.2.15]. It follows from the proof of [15, Cor. 2.2.15], that the proposition is true for arbitrary \(\lambda >0\). See also [3, Prop. 2.2(iii)].\(\square \)
Clearly, an operator T is NE if and only if T is a 0-SPC. Moreover, Proposition 2.3 yields that an operator T is \(\frac{\lambda }{2}\)-averaged (equivalently \(\lambda \)-RFNE with \(\lambda \in (0,2)\)) if and only if T is an \(\alpha \)-SPC, where \(\alpha =1-\frac{2}{\lambda }< 0\).
Definition 2.4
Let \(T:\mathcal {H}\rightarrow \mathcal {H}\) be an operator with nonempty \(\textrm{Fix}T\). We say that T is as follows:
-
(a)
quasi-nonexpansive (QNE), if for all \(x\in \mathcal {H}\) and \(z\in \textrm{Fix}T\)
$$\begin{aligned} \Vert T(x)-z\Vert \le \Vert x-z\Vert \text {;} \end{aligned}$$(6) -
(b)
\(\rho \)-strongly quasi-nonexpansive (\(\rho \)-SQNE), where \(\rho \ge 0\), if for all \(x\in \mathcal {H}\) and \(z\in \textrm{Fix}T\)
$$\begin{aligned} \Vert T(x)-z\Vert ^{2}\le \Vert x-z\Vert ^{2}-\rho \Vert T(x)-x\Vert ^{2} \text {;} \end{aligned}$$(7)If \(\rho >0\) then we simply say that T is SQNE;
-
(c)
a cutter, if for all \(x\in \mathcal {H}\) and \(z\in \textrm{Fix}T\)
$$\begin{aligned} \langle z-x,T(x)-x\rangle \ge \Vert T(x)-x\Vert ^{2}\text {;} \end{aligned}$$(8) -
(d)
a \(\lambda \)-relaxed cutter, where \(\lambda >0\), if T is a \(\lambda \)-relaxation of a cutter, equivalently, for all \(x\in \mathcal {H}\) and \(z\in \textrm{Fix}T\)
$$\begin{aligned} \lambda \langle z-x,T(x)-x\rangle \ge \Vert T(x)-x\Vert ^{2}\text {;} \end{aligned}$$(9) -
(e)
an \(\alpha \)-demicontraction (or an \(\alpha \)-demicontractive operator), where \(\alpha \in (-\infty ,1)\), if for all \(x\in \mathcal {H}\) and \(z\in \textrm{Fix}T\)
$$\begin{aligned} \Vert T(x)-z\Vert ^{2}\le \Vert x-z\Vert ^{2}+\alpha \Vert T(x)-x\Vert ^{2}\text {.} \end{aligned}$$(10)
The name QNE operator was introduced by Dotson in [29], and the name SQNE operator was introduced by Bruck in [11]. In [38], a relaxed cutter was called an operator satisfying condition (A). An \(\alpha \)-strict pseudocontraction with a fixed point is an \(\alpha \)-demicontraction. Clearly, if \(\alpha \le 0\), then an \(\alpha \)-demicontraction is \(\rho \)-SQNE, where \(\rho =-\alpha \), so the notion of a demicontraction is an extension of the notion of an SQNE operator. An example of FNE operator is the metric projection \(P_{C}\) onto a closed convex subset \(C\subseteq \mathcal {H}\). In particular, for an affine subspace \(H\subseteq \mathcal {H}\) (e.g., a hyperplane), for all \(x\in \mathcal {H}\) and \(z\in H\), it holds
Thus, for any \(\lambda >0\) and a \(\lambda \)-relaxed projection \((P_{H})_{\lambda }\), it holds
\(x\in \mathcal {H}\) and \(z\in H\). Further properties of NE, AV, FNE, RFNE, QNE, SQNE operators, cutters, and relaxed cutters as well as relations among these operators which we use in this paper can be found, e.g., in [15, Secs 2.1 and 2.2]. Below, we recall relations of demicontractions to relaxed cutters and to SQNE operators. The following results are well known; see, e.g., [36, Rem. 2.3].
Theorem 2.5
Let \(T:\mathcal {H}\rightarrow \mathcal {H}\) have a fixed point and \(\lambda >0\). The following conditions are equivalent:
-
(i)
T is a cutter;
-
(ii)
\(T_{\lambda }\) is an \(\alpha \)-demicontraction with \(\alpha =(\lambda -2)/\lambda \in (-\infty ,1)\).
Proof
If \(\lambda \in (0,2]\), then it follows from [15, Th. 2.1.39] that T is a cutter if and only if \(T_{\lambda }\) is \(\rho \)-SQNE with \(\rho {:=}(2-\lambda )/\lambda \in [ 0,+\infty )\). The second part of this equivalence means that \(T_{\lambda }\) is an \(\alpha \)-demicontraction with \(\alpha =-\rho =(\lambda -2)/\lambda \in (-\infty ,0]\). It follows from the proof of [15, Th. 2.1.39] that the theorem is true for arbitrary \(\lambda >0\). If \(\lambda >2\) then \(\alpha =(\lambda -2)/\lambda \in (0,1)\).\(\square \)
Because the function \(f:(0,+\infty )\rightarrow (-\infty ,1)\) defined by \(f(\lambda )=(\lambda -2)/\lambda \) is a bijection, Theorem 2.5 states that every demicontraction can be treated as a relaxation of a cutter and vice versa. Replacing \(T_{\lambda }\) by S in Theorem 2.5, setting \(\lambda :=2/(1-\alpha )\) for \(\alpha \in (-\infty ,1)\), we obtain the following result which is equivalent to Theorem 2.5.
Corollary 2.6
Let \(S:\mathcal {H}\rightarrow \mathcal {H}\) have a fixed point, \(\alpha \in (-\infty ,1)\) and \(\lambda =2/(1-\alpha )\in (0,+\infty )\). Then, the following conditions are equivalent:
-
(i)
S is an \(\alpha \)-demicontraction.
-
(ii)
S is a \(\lambda \)-relaxed cutter.
Theorem 2.5 and Corollary 2.6 yield that a relaxation of a demicontraction is again a demicontraction (cf. [9, Lem. 3.1]).
Corollary 2.7
Let \(S:\mathcal {H}\rightarrow \mathcal {H}\) have a fixed point, \(\alpha \in (-\infty ,1)\) and \(\mu >0\). Then the following conditions are equivalent:
-
(i)
S is an \(\alpha \)-demicontraction.
-
(ii)
\(S_{\mu }\) is a \(\beta \)-demicontraction, where \(\beta =(\mu +\alpha -1)/\mu \in (-\infty ,1)\).
The notion of the demi-closedness principle defined below is important for the convergence properties of algorithms employing relaxed cutters.
Definition 2.8
We say that an operator \(T:\mathcal {H}\rightarrow \mathcal {H}\) satisfies the demi-closedness principle if \(T-\textrm{Id}\) is demiclosed at 0, i.e., for any bounded sequence \(\{x^{k}\}_{k=0}^{\infty }\) with \(\Vert T(x^{k})-x^{k}\Vert \rightarrow 0\) and for its weak cluster point y it holds that \(y\in \textrm{Fix}T\).
In some publications, the notion weak regularity of T is applied for an operator T satisfying the demi-closedness principle; see, e.g., [20]. It is well known that a nonexpansive operator satisfies the demi closedness principle [41]. Obviously, a relaxation of an operator satisfying the demi-closedness principle also satisfies the demi-closedness principle. In particular, a strict pseudocontraction, as a relaxation of an FNE operator, satisfies the demi-closedness principle. Moreover, a convex combination as well as composition of SQNE operators that share a common fixed point and satisfy the demi-closedness principle also satisfies the demi-closedness principle [16, Thms 4.1 and 4.2]. In what follows, we give conditions under which strict pseudocontractions as well as demicontractions also share these properties. It is well known that fixed point iterations employing RFNE operators as well as algorithms employing relaxed cutters (or, equivalently, SQNE operators) that satisfy the demi-closedness principle generate sequences which converge weakly, under the assumption that the relaxation parameters are in (0, 2). We briefly recall corresponding results. Let \(V:\mathcal {H}\rightarrow \mathcal {H}\) be an operator with a fixed point. Consider the following iteration
where \(x^{0}\in \mathcal {H}\) is arbitrary and \(\nu _{k}\ge 0\) is a relaxation parameter applied in the k-th iteration, \(k\ge 0\). The following result which is due to Reich [44, Theorem 2] is also known in the literature as the Krasnosel’skiĭ-Mann theorem (see, e.g., [14, Thms 2.1 and 2.2]).
Proposition 2.9
If V is FNE with \(\textrm{Fix}V\ne \emptyset \), \(\nu _{k}\in [ \varepsilon ,2-\varepsilon ]\) for some \(\varepsilon \in (0,1)\) and \(x^{k}\) is generated by iteration (11) then \(x^{k}\) converges weakly to an element of \(\textrm{Fix}V\).
Many variants of the following result are well known (see, e.g., [15, Cor. 3.7.3] or its more general versions [5, Th. 2.9] or [20, Th. 6.1(i)]).
Proposition 2.10
If V is a cutter satisfying the demi-closedness principle, \(\nu _{k}\in [ \varepsilon ,2-\varepsilon ]\) for some \(\varepsilon \in (0,1)\) and \(x^{k}\) is generated by iteration (11), then \(x^{k}\) converges weakly to an element of \(\textrm{Fix}V\).
An equivalent formulation of the proposition below was proposed by Măruşter in [38, Th. 1]. By the first look, this result seems to be more general than Proposition 2.10 (see also [10, Th. 12] for a related result).
Proposition 2.11
Let \(\alpha \in (-\infty ,1)\), \(V:\mathcal {H}\rightarrow \mathcal {H}\) be an \(\alpha \)-demicontraction satisfying the demi-closedness principle and the sequence \(\{x^{k}\}_{k=0}^{\infty }\) be generated by iteration (11). If \(\nu _{k}\in [\varepsilon ,1-\alpha -\varepsilon ]\) for some \(\varepsilon \in (0,\frac{1-\alpha }{2})\), then \(x^{k}\) converges weakly to an element of \(\textrm{Fix}V\).
Remark 2.12
If \(\alpha =-1\) in Proposition 2.11, then, by Corollary 2.6, V is a cutter (1-RFNE operator). Thus, Proposition 2.10 follows from Proposition 2.11. Nevertheless, Proposition 2.11 can also be reduced to Proposition 2.10. Indeed. Suppose that V is an \(\alpha \)-demicontraction and \(\nu _{k}\in [ \varepsilon ,1-\alpha -\varepsilon ]\) for some \(\varepsilon \in (0,\frac{1-\alpha }{2})\). By Corollary 2.6, \(T:=V_{\frac{1-\alpha }{2}}\) is a cutter. Consequently, \(V_{\nu _{k}}=T_{\lambda _{k}}\), where \(\lambda _{k}=\frac{2\nu _{k}}{1-\alpha }\in [ \frac{2\varepsilon }{1-\alpha },2-\frac{2\varepsilon }{1-\alpha }]\), i.e., V satisfies the assumptions of Proposition 2.10. We see that the assumption that V is an \(\alpha \)-demicontraction in Proposition 2.11 is superfluous. It is enough to suppose that V is a cutter and \(\nu _{k}\in [ \varepsilon ,2-\varepsilon ]\) for some \(\varepsilon \in (0,1)\) or, equivalently, that V is quasi-nonexpansive and \(\nu _{k}\in [ \varepsilon ,1-\varepsilon ]\) for some \(\varepsilon \in (0,1/2)\).
Many iterations studied in the last decades can be presented as special cases of (11). We recall here two algorithms.
Example 2.13
Let T and U be FNE. Define \(V:=U_{2}T_{2}\) (\(T_{2}\) and \(U_{2}\) are NE as 2-relaxations of FNE operators) and let \(\nu _{k}=\nu =\frac{1}{2}\). Then, \(U_{2}T_{2}\) is NE as composition of NE operators, consequently \(V_{\nu }\) is FNE and (11) with \(\nu _{k}=\frac{1}{2}\) is, actually, the averaged alternating reflection method (also called Douglas–Rachford method); see [6]. Clearly, for arbitrary \(\nu \in (0,1)\), the operator \(V_{\nu }\) is averaged. If, additionally, \(\textrm{Fix}V\ne \emptyset \), then \(V_{\nu }\) is an SQNE operator satisfying the demi-closedness principle, thus, for any sequence \(\{x^{k}\}_{k=0}^{\infty }\) generated by the iteration \(x^{k+1}=V_{\nu _{k}}x^{k}\) where \(\nu _{k}\in [ \varepsilon ,1-\varepsilon ]\) for some \(\varepsilon \in (0,1/2)\), converges weakly to a fixed point of V. Now define \(V:=U_{\mu }T_{\lambda } \) where \(\lambda ,\mu >0\) (or, equivalently, V is composition of an \(\alpha \)- and a \(\beta \)-SPC, where \(\alpha ,\beta \in (-\infty ,1)\)). Under what conditions on \(\lambda ,\mu >0\) (equivalently on \(\alpha ,\beta \in (-\infty ,1)\)) and \(\nu _{k}\) any sequence \(\{x^{k}\}_{k=0}^{\infty }\) generated by iteration (11) converges weakly to a fixed point of V? In particular, may one of the parameters \(\lambda \) or \(\mu \) be greater than 2? For example, if \(V=U_{\mu }T_{\lambda }\), where \(\lambda +\mu =4\), does the convergence hold for some \(\nu _{k}\)? Answer on this questions follows from [3, Props 2.5 and 2.9]. Natural questions arise at this point. Does the convergence remain true if we suppose that T and U are cutter operators that share a common fixed point and satisfy the demi-closedness principle instead of the assumption that T and U are FNE and \(\textrm{Fix}V\ne \emptyset \)? Under what conditions on \(\lambda \) and \(\mu \) it holds \(\textrm{Fix}V=\textrm{Fix}T\cap \textrm{Fix}U\)? These questions will be answered in Sects. 3 and 4.
Example 2.14
In [39], Moudafi considered the following split common fixed point problem (SCFPP):
where \(A:\mathcal {H}_{1}\rightarrow \mathcal {H}_{2}\) is a nonzero bounded linear operator, \(\mathcal {H}_{1}\) and \(\mathcal {H}_{2}\) are two real Hilbert spaces, \(S:\mathcal {H}_{2}\rightarrow \mathcal {H}_{2}\) is an \(\alpha \)-demicontraction with \(\textrm{Fix}S=Q\), U : \(\mathcal {H}_{1}\rightarrow \mathcal {H}_{1}\) is a \(\beta \)-demicontraction with \(\textrm{Fix}U=C\), both satisfying the demi-closedness principle, and \(F:=C\cap A^{-1}(Q)\ne \emptyset \). Moudafi proposed the following iteration for solving the SCFPP:
where \(x^{0}\in \mathcal {H}_{1}\) is arbitrary, \(\mu _{k}\in (\varepsilon ,1-\beta -\varepsilon )\) for some \(\varepsilon \in (0,\frac{1-\beta }{2})\), \(\lambda \in (0,1-\alpha )\) and T is the Landweber operator related to S, i.e.
(see [21] for a definition of the Landweber transform \(\mathcal {L}\{\cdot \}\)). Moudafi proved that for arbitrary \(x^{0}\in \mathcal {H}_{1}\) the sequence \(\{x^{k}\}_{k=0}^{\infty }\) generated by iteration (13), where T is given by (14), converges weakly to an element of F [39, Th. 2.1]. Related algorithms for the so called multiple split fixed point problems (MSFPP) with cyclic application of Landweber transform were studied in [49] and [50]. Moudafi supposed that \(\alpha ,\beta \in [ 0,1)\), but the convergence also holds for arbitrary \(\alpha ,\beta \in (-\infty ,1)\). Indeed, suppose for simplicity, that \(\mu _{k}\) is constant, i.e., \(\mu _{k}=\mu \in (0,1-\beta )\) for all \(k\ge 0\). Similarly as in [16, Lem. 4.1], one can prove that T is an \(\alpha \)-demicontraction and \(\textrm{Fix}T=A^{-1}(\textrm{Fix}S)\). By Corollary 2.7, \(T_{\lambda }\) is a \(\gamma \)-demicontraction, where \(\gamma =1-\frac{1-\alpha }{\lambda }< 0\), i.e., \(T_{\lambda }\) is \(-\gamma \)-SQNE, and \(U_{\mu }\) is a \(\delta \)-demicontraction, where \(\delta =1-\frac{1-\beta }{\mu }< 0\), i.e. \(U_{\mu }\) is \(-\delta \)-SQNE. Thus, \(U_{\mu }T_{\lambda }\) is \(\kappa \)-SQNE, where \(\kappa =-(\gamma ^{-1}+\delta ^{-1})^{-1}\) [15, Cor. 2.1.47], \(\textrm{Fix}(U_{\mu }T_{\lambda })=\textrm{Fix}U_{\mu }\cap \textrm{Fix}T_{\lambda }=\textrm{Fix}U\cap \textrm{Fix}T=F\) [15, Th. 2.1.26(ii)] and \(U_{\mu }T_{\lambda }\) satisfies the demi-closedness principle [20, Cor. 5.6(i)]. Proposition 2.10 yields now that any sequence \(\{x^{k}\}_{k=0}^{\infty }\) generated by iteration (13), where T is given by (14), converges weakly to an element of F. The convergence also holds if \(\mu _{k}\) is not constant. To prove it, one should introduce a definition of a sequence of operators satisfying the demi-closedness principle and apply [20, Cor. 5.5(i)] instead of [20, Cor. 5.6(i)]. Note that iteration (13) employed, actually, SQNE operators \(U_{\mu _{k}}\) and \(T_{\lambda }\). Natural questions arise at this point. Is it possible to allow that \(T_{\lambda }\) and/or \(U_{\mu _{k}}\) are demicontractions which are not SQNE? Under what conditions on \(\lambda ,\mu ,\nu _{k}>0\) any sequence \(\{x^{k}\}_{k=0}^{\infty }\) generated by the iteration \(x^{k+1}=(U_{\mu }T_{\lambda })_{\nu _{k}}(x^{k})\) converges weakly to an element of F? Theses questions will be answered in Sects. 3 and 4.
3 Properties of strict pseudocontractions and demicontractions
In this section, we give conditions under which convex combinations as well as compositions of demicontractions (satisfying the demi-closedness principle) are again demicontractions (satisfying the demi-closedness principle).
3.1 Convex combinations of strict pseudocontractions and demicontractions
Let \(T_{i}:\mathcal {H}\rightarrow \mathcal {H}\), \(i\in I:=\{1,2,...,m\}\). The following theorems extend [15, Thms 2.1.50 and 2.2.35], where only the case \(\lambda _{i}\in (0,2)\), \(i\in I\), was considered. An equivalent formulation of the theorem below is presented in [3, Prop. 2.4].
Theorem 3.1
Let \(T_{i}\) be \(\lambda _{i}\)-RFNE where \(\lambda _{i}\in (0,+\infty )\), \(i\in I\), \(w_{i}>0,i\in I\), with \(\sum _{i=1}^{m}w_{i}=1\) and \(T:=\sum _{i=1}^{m}w_{i}T_{i}\). Then:
-
(i)
T is \(\lambda \)-RFNE with
$$\begin{aligned} \lambda =\sum _{i=1}^{m}w_{i}\lambda _{i}\text {;} \end{aligned}$$(15) -
(ii)
The relaxation parameter \(\lambda \) satisfies inequalities
$$\begin{aligned} 0< \min _{i\in I}\lambda _{i}\le \lambda \le \max _{i\in I}\lambda _{i}< +\infty \text {.} \end{aligned}$$(16)
Proof
In [15, Th. 2.2.35] the case \(\lambda _{i}\in (0,2)\), \(i\in I\), was considered. It follow from the proof of [15, Th. 2.2.35] that the theorem is true for arbitrary \(\lambda _{i}\in (0,+\infty )\), \(i\in I\).\(\square \)
Corollary 3.2
Let \(T_{i}\) be an \(\alpha _{i}\)-SPC, where \(\alpha _{i}\in (-\infty ,1)\), \(i\in I\), \(w_{i}>0,i\in I\), with \(\sum _{i=1}^{m}w_{i}=1\), and \(T:=\sum _{i=1}^{m}w_{i}T_{i}\). Then:
-
(i)
T is an \(\alpha \)-SPC with
$$\begin{aligned} \alpha =1-\left( \sum _{i=1}^{m}\frac{w_{i}}{1-\alpha _{i}}\right) ^{-1}\text {;} \end{aligned}$$(17) -
(ii)
The parameter \(\alpha \) satisfies inequalities
$$\begin{aligned} -\infty< \min _{i\in I}\alpha _{i}\le \alpha \le \max _{i\in I}\alpha _{i}< 1 \text {.} \end{aligned}$$(18)
Proof
By Proposition 2.3, \(T_{i}\) is \(\lambda _{i}\)-RFNE, where \(\lambda _{i}=\frac{2}{1-\alpha _{i}}\), \(i\in I\). Theorem 3.1 yields that T is \(\lambda \)-RFNE, where \(\lambda =\sum _{i=1}^{m}\frac{2w_{i}}{1-\alpha _{i}}\). Applying Proposition 2.3 again, we obtain that T is an \(\alpha \)-SPC with
This proves part (i). Moreover,
which proves part (ii). \(\square \)
Theorem 3.3
Let \(T_{i}:\mathcal {H}\rightarrow \mathcal {H}\) be a \(\lambda _{i}\)-relaxed cutter, where \(\lambda _{i}\in (0,+\infty )\), \(i\in I\), \(\bigcap _{i=1}^{m}\textrm{Fix}T_{i}\ne \emptyset \), \(w_{i}>0,i\in I\), with \(\sum _{i=1}^{m}w_{i}=1\), and \(T=\sum _{i=1}^{m}w_{i}T_{i}\). Then:
-
(i)
The operator T is a \(\lambda \)-relaxed cutter with \(\lambda \) given by (15).
-
(ii)
The relaxation parameter \(\lambda \) satisfies inequalities (16).
-
(iii)
\(\textrm{Fix}T=\bigcap _{i=1}^{m}\textrm{Fix}T_{i}\).
-
(iv)
Suppose that \(T_{i}\), \(i\in I\), satisfy the demi-closedness principle. Then T also satisfies the demi-closedness principle.
Proof
(cf. [15, Th. 2.1.50]) Let \(x\in \mathcal {H}\) and all \(z\in \bigcap _{i\in I}\textrm{Fix}T_{i}\). Denote \(v_{i}:=\frac{w_{i}\lambda _{i}}{\lambda }\) and define \(U_{i}:=(T_{i})_{\lambda _{i}^{-1}}\), \(i\in I\). Then, \(U_{i}\) is a cutter, \(T_{i}x-x=\lambda _{i}(U_{i}-x)\), \(v_{i}>0\), \(i\in I\), and \(\sum _{i=1}^{m}v_{i}=1\). By the convexity of the function \(\Vert \cdot \Vert ^{2}\), we obtain
(ii) is obvious.
(i) and (iii) The inclusion \(\bigcap _{i=1}^{m}\textrm{Fix}T_{i}\subseteq \textrm{Fix}T\) is clear. If \(\textrm{Fix}T=\emptyset \), then the converse inclusion is obvious. Suppose that \(\textrm{Fix}T\ne \emptyset \). For \(x\in \textrm{Fix}T\) there hold equalities in (19)–(22) which in view of \(\frac{w_{i}}{\lambda _{i}}>0\), \(i\in I\), means that \(x\in \textrm{Fix}T_{i}\), \(i\in I\). This yields (i) and (iii).
(iv) Define \(U:=\sum _{i=1}^{m}v_{i}U_{i}\). By (i), U is a cutter. We have
Because \(U_{i}\) satisfies the demi-closedness principle as a relaxation of \(T_{i}\), \(i\in I\), the operator U satisfies the demi-closedness principle [16, Th. 4.1]. Consequently, T also satisfies the demi-closedness principle as a relaxation of U.\(\square \)
Corollary 3.4
Let \(T_{i}:\mathcal {H}\rightarrow \mathcal {H}\) be an \(\alpha _{i}\)-demicontraction, where \(\alpha _{i}\in (-\infty ,1)\), \(i\in I\), \(\bigcap _{i=1}^{m}\textrm{Fix}T_{i}\ne \emptyset \), \(w_{i}>0,i\in I\), with \(\sum _{i=1}^{m}w_{i}=1\), and \(T:=\sum _{i=1}^{m}w_{i}T_{i}\). Then:
-
(i)
T is an \(\alpha \)-demicontraction with \(\alpha \) given by (17).
-
(ii)
The parameter \(\alpha \) satisfies inequalities (18).
-
(iii)
\(\textrm{Fix}T=\bigcap _{i=1}^{m}\textrm{Fix}T_{i}\).
-
(iv)
Suppose that \(T_{i}\), \(i\in I\), satisfy the demi-closedness principle. Then, T also satisfies the demi-closedness principle.
3.2 Composition of strict pseudocontractions and demicontractions
Before we formulate the main result of this paper, we prove an auxiliary lemma. Let \(\lambda ,\mu >0\). Consider the following equation:
If \(\lambda =2\) and \(\mu =2\), then arbitrary \(\nu \ne 0\) is a solution of (23). Otherwise, if \(\lambda \mu =4\), then (23) has no solution. One can easily check that in other cases, the unique solution of (23) is
In particular, if \(\lambda =2\) and \(\mu \ne 2\) or if \(\mu =2\) and \(\lambda \ne 2\), then \(\nu ^{*}=2\) is the unique solution of (23). Level lines of the function \(\nu (\lambda ,\mu )\) are presented on Fig. 1. Note that \(\nu (\lambda ,\mu )\) is well defined if and only if \(\lambda \mu \ne 4\). Moreover, one can be easily proved that if \(\lambda \mu < 4\), then \(\lambda +\mu >\lambda \mu \) and \(\nu (\lambda ,\mu )>0\) (see Appendix). If \(4< \lambda \mu < \lambda +\mu \), then \(\nu (\lambda ,\mu )< 0\). If \(\lambda +\mu < \lambda \mu \), then \(\lambda \mu >4\) and \(\nu (\lambda ,\mu )>0\). However, in the latter case \(\nu \le \min \{\lambda ,\mu \}\), where the equality holds if and only if \(\min \{\lambda ,\mu \}=2\).

Solution \(\nu \) of (23) depending on \(\lambda \) and \(\mu \)
The following auxiliary lemma shows the properties of the solution of (23) for \(\lambda \mu < 4\) (cf. [15, Lem. 2.1.45], where the case \(\lambda ,\mu < 2\) was considered).
Lemma 3.5
Let \(\lambda ,\mu >0\) be such that \(\lambda \mu < 4\). Then:
-
(i)
The unique solution \(\nu ^{*}=\nu (\lambda ,\mu )\) of (23) satisfies the following inequalities
$$\begin{aligned} 0< \min \{\lambda ,\mu \}< \frac{4\min \{\lambda ,\mu \}}{\min \{\lambda ,\mu \}+2}\le \nu ^{*} \end{aligned}$$(25)and
$$\begin{aligned} \nu ^{*}\ge \max \{\lambda ,\mu \}\text {;} \end{aligned}$$(26) -
(ii)
If, additionally, \(\lambda ,\mu < 2\) then
$$\begin{aligned} \nu ^{*}\le \frac{4\max \{\lambda ,\mu \}}{\max \{\lambda ,\mu \}+2}< 2\text {;} \end{aligned}$$(27)
Proof
Note that \(\frac{\partial \nu }{\partial \lambda }(\lambda ,\mu )=4\frac{(\mu -2)^{2}}{(4-\lambda \mu )^{2}}\ge 0\). Similarly, \(\frac{\partial \nu }{\partial \mu }(\lambda ,\mu )=4\frac{(\lambda -2)^{2}}{(4-\lambda \mu )^{2}}\ge 0\). Suppose that \(\lambda \le \mu \). Note that \(\lambda < 2\) in this case, because \(\lambda \mu < 4\). Thus,
Moreover,
if \(\lambda \le \mu < 2\). Now suppose that \(\mu \le \lambda \). In a similar way as above one can prove that
Moreover,
if \(\mu \le \lambda < 2\). The considerations made above prove all of the inequalities in (25)-(27).
\(\square \)
Let \(\lambda ,\mu >0\) be such that \(\lambda \mu < 4\). The theorem below shows that composition of \(\lambda \)-RFNE and \(\mu \)-RFNE operators is \(\nu (\lambda ,\nu )\)-RFNE. This result extends a well-known result of Ogura and Yamada [40, Theorem 3(b)] (cf. [15, Theorem 2.2.37]), where the case \(\lambda ,\mu \in (0,2)\) was considered. Moreover, we show that the constant \(\nu ^{*}:=\nu (\lambda ,\mu )\) is optimal. An equivalent formulation of the first part of (ii) of the theorem below was presented in [3, Prop. 2.5] in terms of conically averaged operators. However, we give another proof of this part which we apply in Section 3.3 in order to introduce extrapolations of compositions of RFNE operators and extrapolations of compositions of relaxed cutters. As far as we know, the second part of item (ii) in the theorem below as well as items (i) and (iii)-(v) are new. For \(x,y\in \mathcal {H}\) denote \(a_{1}:=T(x)-x\), \(a_{2}:=T(y)-y\), \(b_{1}:=UT(x)-T(x)\) and \(b_{2}:=UT(y)-T(y)\).
Theorem 3.6
Let \(\lambda ,\mu >0\), \(T:\mathcal {H}\rightarrow \mathcal {H}\) be \(\lambda \)-RFNE, \(U:\mathcal {H}\rightarrow \mathcal {H}\) be \(\mu \)-RFNE. Then,
-
(i)
For arbitrary \(x,y\in \mathcal {H}\) and for arbitrary \(\nu \in \mathbb {R} {\setminus } \{0\}\) it holds that
$$\begin{aligned}{} & {} \langle y-x,(UT(x)-x)-(UT(y)-y)\rangle -\frac{1}{\nu }\Vert (UT(x)-x)-(UT(y)-y)\Vert ^{2} \nonumber \\\ge & {} (\frac{1}{\lambda }\!-\!\frac{1}{\nu })\Vert a_{1}\!-\!a_{2}\Vert ^{2}\!+\!(\frac{1}{\mu }\!-\!\frac{1}{\nu })\Vert b_{1}\!-\!b_{2}\Vert ^{2}\!+\!(1-\frac{2}{\nu })\langle a_{1}\!-\!a_{2},b_{1}\!-\!b_{2}\rangle \text {.} \end{aligned}$$(30) -
(ii)
If \(\lambda \mu < 4\), then UT is \(\nu ^{*}\)-RFNE, where \(\nu ^{*}:=\nu (\lambda ,\mu )\) is given by (24). Consequently, UT satisfies the demi-closedness principle. Moreover, if \(\dim \mathcal {H}\ge 2\), then the constant \(\nu ^{*}\) is optimal, i.e., for arbitrary \(\rho \in (0,\nu ^{*})\) there are a \(\lambda \)-RFNE operator T and a \(\mu \)-RFNE operator U such that UT is not \(\rho \)-RFNE.
-
(iii)
If \(\lambda \mu < \lambda +\mu \) and \(\textrm{Fix}T\cap \textrm{Fix}U\ne \emptyset \), then \(\textrm{Fix}UT=\textrm{Fix}T\cap \textrm{Fix}U\).
-
(iv)
Suppose that \(\lambda \mu >4\). If \(\lambda \mu \le \lambda +\mu \) and \(\dim \mathcal {H}\ge 2\) or if \(\lambda \mu >\lambda +\mu \), then there are a \(\lambda \)-RFNE operator T and a \(\mu \)-RFNE operator U such that UT is not RFNE.
-
(v)
If \(\lambda \mu \ge \lambda +\mu \), then there are a \(\lambda \)-RFNE operator T and a \(\mu \)-RFNE operator U such that \(\textrm{Fix}UT\ne \textrm{Fix}T\cap \textrm{Fix}U\ne \emptyset \).
Proof
(i) Let \(\nu \in \mathbb {R} \) and \(x,y\in \mathcal {H}\) be arbitrary. It follows from (5) that \(\langle y-x,a_{1}-a_{2}\rangle \ge \frac{1}{\lambda }\Vert a_{1}-a_{2}\Vert ^{2}\) and \(\langle T(y)-T(x),b_{1}-b_{2}\rangle \ge \frac{1}{\mu }\Vert b_{1}-b_{2}\Vert ^{2}\). We have
(ii) Let \(\lambda \mu < 4\) and \(\nu ^{*}=\nu (\lambda ,\mu )\) be defined by (24). By Lemma 3.5(i), \(\nu ^{*}\ge \max \{\lambda ,\mu \}>0\), thus, \(\frac{1}{\lambda }-\frac{1}{\nu ^{*}}\ge 0\) and \(\frac{1}{\mu }-\frac{1}{\nu ^{*}}\ge 0\). Now Lemma 3.5 and the properties of the inner product give
where the sign \({\mp }\) should be replaced by – if 0 \(< \nu ^{*}< 2\) and by \(+\) if \(\nu ^{*}\ge 2\). By inequalities (31)-(35),
By Proposition 2.2 this means that UT is a \(\nu ^*\)-RFNE. Consequently, UT satisfies the demi-closedness principle as a relaxation of an NE operator.
Now, suppose that \(\dim \mathcal {H}\ge 2\). We prove that \(\nu ^{*}\) is optimal. Suppose for simplicity, that \(\mathcal {H}=\mathbb {R}^{2}\). Denote \(H:=\{x=(x_{1},x_{2})\in \mathbb {R} ^{2}:x_{2}=0\}\) and \(H_{k}:=\{x=(x_{1},x_{2})\in \mathbb {R} ^{2}:x_{1}-kx_{2}=k\}\) and define \(T:=(P_{H})_{\lambda }\) and \(U_{k}:=(P_{H_{k}})_{\mu }\), \(k\ge 0\). Clearly, T is \(\lambda \)-RFNE, \(U_{k}\) is \(\mu \)-RFNE and \(z_{k}:=(k,0)\) is the only fixed point of \(U_{k}T\). Let \(\rho \in (0,\) \(\nu ^{*})\). We prove that for some \(k\ge 0\) the operator \(U_{k}T\) is not \(\rho \)-RFNE. For \(x=(0,\xi )\) with \(\xi \in \mathbb {R} \) we have \(T(x)=(0,(1-\lambda )\xi )\),
and
Define
In order to prove that for \(\rho < \nu ^{*}\) and for some \(k\ge 0\) the operator \(U_{k}T\) is not \(\rho \)-RFNE it is enough to show that \(f(\xi ,\rho ):=\lim _{k\rightarrow \infty }f_{k}(\xi ,\rho )< 0\) for some \(\xi \in \mathbb {R} \) and for arbitrary \(\rho \in (0,\) \(\nu ^{*})\). Actually, it is enough to show this for \(\rho \) close to \(\nu ^{*}\), because, if an operator S is \(\nu _{1}\)-RFNE and \(\nu _{2}>\nu _{1}\), then S is \(\nu _{2}\)-RFNE. By (37)-(38), we have
Note that \(0< \lambda +\mu -\lambda \mu < \nu ^{*}\). If \(\rho \in (\lambda +\mu -\lambda \mu ,\nu ^{*})\), then the function \(f(\cdot ,\rho )\) attains its minimum at
equal to
A direct calculus shows that \(h(\nu ^{*})=0\) and that
Thus, for \(\rho < \nu ^{*}\) and sufficiently close to \(\nu ^{*}\) we have \(f(\xi ^{*}(\rho ),\rho )< 0\). This completes the proof of (ii).
(iii) Let \(\lambda \mu < \lambda +\mu \) and \(\textrm{Fix}T\cap \textrm{Fix}U\ne \emptyset \). If \(\max \{\lambda ,\mu \}< 2\), then T and U are SQNE and it follows from [4, Prop. 2.10] that \(\textrm{Fix}UT=\textrm{Fix}T\cap \textrm{Fix}U\). Suppose that \(\max \{\lambda ,\mu \}\ge 2\). Lemma 3.5(i) yields that \(\nu ^{*}\ge 2\) if \(\lambda \mu < 4\). Moreover, \(\nu ^{*}<0\) if \(\lambda \mu >4\). The inclusion \(\textrm{Fix}T\cap \textrm{Fix}U\subseteq \textrm{Fix}UT\) is clear. We prove that
The inclusion is obvious if \(\textrm{Fix}UT=\emptyset \). Suppose that \(\textrm{Fix}UT\ne \emptyset \) and that the opposite to (41) holds true. Inequalities (31)–(35) for \(y\in \textrm{Fix}UT\) give
(note that (35) with the \(+\) sign instead of \({\mp }\) is also true if \(4< \lambda \mu < \lambda +\mu \), because \(\nu ^{*}< 0\) in this case). Let \(x\in \text {Fix}UT\) be such that \(x\notin \text {Fix}T\cap \text {Fix}U \). Then, it follows from (42) that
and
This leads to \(\sqrt{\frac{1}{\lambda }-\frac{1}{\nu ^{*}}}=\sqrt{\frac{1}{\mu }-\frac{1}{\nu ^{*}}}\), consequently, \(\lambda =\mu \ge 2\). This stands in contradiction to the assumption \(\lambda \mu < \lambda +\mu \), which proves (41).
(iv) We consider 2 cases:
(a) \(4< \lambda \mu \le \lambda +\mu \) and \(\dim \mathcal {H}\ge 2\). For simplicity we suppose that \(\mathcal {H}= \mathbb {R} ^{2}\). For the operators T and \(U_{k}\), we use the same notation as in (ii). Let \(x=(0,\xi )\) with \(\xi \in \mathbb {R} \). Then, \(U_{k}T(x)\) is given by (37). Suppose that for all \(k\ge 0\), the operators \(U_{k}T\) are RFNE; consequently, they are relaxed cutters. Then, \(\langle z_{k}-x,U_{k}T(x)-x\rangle \ge \frac{1}{\nu _{k}}\Vert U_{k}T(x)-x\Vert ^{2}\ge 0\) for some \(\nu _{k}>0\), \(k\ge 0\), and
for all \(\xi \in \mathbb {R} \). If \(\lambda \mu =\lambda +\mu \), then we obtain \(\alpha <0\) for some \(\xi \), a contradiction. If \(\lambda \mu < \lambda +\mu \), then
Thus, for \(\xi =\frac{(\lambda -2)\mu }{2(\lambda +\mu -\lambda \mu )}\) we obtain \(\alpha <0\), a contradiction. Thus, there is \(k\ge 1\) for which \(\langle z_{k}-x,U_{k}Tx-x\rangle <0\). This means that \(U_{k}T\) is not a relaxed cutter; thus, \(U_{k}T\) is not RFNE.
(b) \(\lambda \mu >\lambda +\mu \). Then, \(\lambda >1\). Let \(H\subseteq \mathcal {H}\) be a hyperplane. Denote \(P:=P_{H}\) and define \(T:=P_{\lambda }\) and \(U:=P_{\mu }\). Clearly, T is \(\lambda \)-RFNE, U is \(\mu \)-RFNE and \(\textrm{Fix}UT=\textrm{Fix}T=\textrm{Fix}U=H\). Let \(x\in \mathcal {H}\) and \(z\in H\) be arbitrary. We have \(y:=P_{\lambda }(x)=x+\lambda (P(x)-x)\). By the properties of the metric projection, \(P(y)=P(x)\). Thus,
and
if \(x\notin H\), which means that UT is not a relaxed cutter; thus, UT is not RFNE.
(v) Let \(\lambda \mu \ge \lambda +\mu \). Then, \(\lambda >1\). Let \(H\subseteq \mathcal {H}\) be a hyperplane. Denote \(P:=P_{H}\), \(\sigma :=\frac{\lambda }{\mu (\lambda -1)}\) and define \(T:=P_{\lambda }\) and \(U:=(P_{\sigma })_{\mu }=P_{\sigma \mu }\). Clearly, T is \(\lambda \)-RFNE, U is \(\sigma \mu \)-RFNE and \(\textrm{Fix}T=\textrm{Fix}U=H\). Similarly as in the proof of case (b) of (iv), for any \(x\in \mathcal {H}\), we have
which means that \(\textrm{Fix}UT=\mathcal {H}\ne H=\textrm{Fix}T\cap \textrm{Fix}U\).\(\square \)
By Proposition 2.3, there is equivalence between \(\alpha \)-SPC and \(\lambda \)-RFNE operators, where \(\alpha \in (-\infty ,1)\) and \(\lambda =2/(1-\alpha )\in (0,+\infty )\). Thus, Theorem 3.6 can be presented in terms of SPC instead of RFNE operators. Note that for \(\alpha ,\beta \in (-\infty ,1)\), the inequality \(\alpha +\beta < \alpha \beta \) implies that \(\alpha +\beta <0\), consequently at least one of \(\alpha ,\beta \) is negative and \(\frac{\alpha \beta }{\alpha +\beta }< 1\) (see Appendix).
Corollary 3.7
Let \(\alpha ,\beta \in (-\infty ,1)\), \(T:\mathcal {H}\rightarrow \mathcal {H}\) be an \(\alpha \)-SPC, \(U:\mathcal {H}\rightarrow \mathcal {H}\) be a \(\beta \)-SPC.
-
(i)
If \(\alpha +\beta < \alpha \beta \), then UT is a \(\gamma ^{*}\)-SPC, where
$$\begin{aligned} \gamma ^{*}=\gamma (\alpha ,\beta )=\frac{\alpha \beta }{\alpha +\beta }\text {.} \end{aligned}$$(44)Consequently, UT satisfies the demi-closedness principle. If, additionally,
-
(a)
\(\alpha ,\beta < 0\), then \(\gamma ^{*}<0\).
-
(b)
\(\alpha \beta <0\), then \(\gamma ^{*}\in (0,1)\).
Moreover, if \(\dim \mathcal {H}\ge 2\), then the constant \(\gamma ^{*}\) is optimal, i.e., for arbitrary \(\rho \in (-\infty ,\gamma ^{*})\), there are an \(\alpha \)-SPC T and a \(\beta \)-SPC U such that UT is not a \(\rho \)-SPC.
-
(a)
-
(ii)
If \(\alpha +\beta <0\) and \(\textrm{Fix}T\cap \textrm{Fix}U\ne \emptyset \), then \(\textrm{Fix}UT=\textrm{Fix}T\cap \textrm{Fix}U\).
-
(iii)
Suppose that \(\alpha +\beta >\alpha \beta \). If \(\alpha +\beta \le 0\) and \(\dim \mathcal {H}\ge 2\) or if \(\alpha +\beta >0\), then there are an \(\alpha \)-SPC T and a \(\beta \)-SPC U such that UT is not an SPC.
-
(iv)
If \(\alpha +\beta \ge 0\), then there are an \(\alpha \)-SPC T and a \(\beta \)-SPC U such that \(\textrm{Fix}UT\ne \textrm{Fix}T\cap \textrm{Fix}U\ne \emptyset \).
Let \(\lambda ,\mu >0\) be such that \(\lambda \mu < 4\), \(T:\mathcal {H}\rightarrow \mathcal {H}\) be \(\lambda \)-RFNE, \(U:\mathcal {H}\rightarrow \mathcal {H}\) be \(\mu \)-RFNE (equivalently, let \(T:\mathcal {H}\rightarrow \mathcal {H}\) be an \(\alpha \)-SPC, \(U:\mathcal {H}\rightarrow \mathcal {H}\) be a \(\beta \)-SPC, where \(\alpha ,\beta \in (-\infty ,1)\) are such that \(\alpha +\beta < \alpha \beta \)) with \(\textrm{Fix}(UT)\ne \emptyset \). Theorem 3.6 (equivalently, Corollary 3.7) together with Proposition 2.9 and the fact that \((UT)_{1/\nu ^{*}}\) is FNE yield the weak convergence of sequences \(x^{k+1}=(UT)_{\lambda _{k}/\nu ^{*}}(x^{k})\) to some \(x^{*}\in \textrm{Fix}(UT)\), where \(\lambda _{k}\in [ \varepsilon , 2-\varepsilon ]\) for some small \(\varepsilon >0\). In Section 4 we show that an enlarged range of \(\lambda _{k}\) guarantees the weak convergence (see Theorem 4.1 and Corollaries 4.2 and 4.4).
If we set \(y\in \textrm{Fix}T\) in Definition 2.1(e), then we receive the definition of an \(\alpha \)-demicontraction (equivalently a \(\lambda \)-relaxed cutter; see Corollary 2.6). Thus, Theorem 3.6 yields a part of the following result which extends a well known result of Yamada and Ogura [52, Proposition 1(d)] (cf. [15, Theorem 2.1.46]), where only the case \(\lambda ,\mu \in (0,2)\) was considered. The optimality of the constant \(\nu ^{*}\) which was proved in Theorem 3.6 also applies for composition of relaxed cutters. As far as we know, the results presented in the theorem below are new. Denote \(a:=T(x)-x\) and \(b:=UT(x)-T(x)\).
Theorem 3.8
Let \(\lambda ,\mu >0\), \(T:\mathcal {H}\rightarrow \mathcal {H} \) be a \(\lambda \)-relaxed cutter, \(U:\mathcal {H}\rightarrow \mathcal {H}\) be a \(\mu \)-relaxed cutter and let \(\textrm{Fix}T\cap \textrm{Fix}U\ne \emptyset \). Then
-
(i)
For arbitrary \(x\in \mathcal {H}\) and \(z\in \textrm{Fix}T\cap \textrm{Fix}U\) and for arbitrary \(\nu \in \mathbb {R} \) it holds that
$$\begin{aligned} \langle z\!-x,UT(x)\!-x\rangle \!-\frac{1}{\nu }\Vert UT(x)\!-x\Vert ^{2}\!\ge \! (\frac{1}{\lambda }\!-\frac{1}{\nu })\Vert a\Vert ^{2}\!+(\frac{1}{\mu }-\frac{1}{\nu })\Vert b\Vert ^{2}\!+(1\!-\frac{2}{\nu })\langle a,b\rangle \text {.} \end{aligned}$$(45) -
(ii)
If \(\lambda \mu < 4\), then UT is a \(\nu ^{*}\)-relaxed cutter, where \(\nu ^{*}=\nu (\lambda ,\mu )\) is given by (24). Moreover, if \(\dim \mathcal {H}\ge 2\), then the constant \(\nu ^{*}\) is optimal, i.e. for arbitrary \(\rho \in (0,\nu ^{*})\) there are a \(\lambda \)-relaxed cutter T and a \(\mu \)-relaxed cutter U such that UT is not a \(\rho \)-relaxed cutter.
-
(iii)
If \(\lambda \mu < \lambda +\mu \), then \(\textrm{Fix}UT=\textrm{Fix}T\cap \textrm{Fix}U\).
-
(iv)
Suppose that \(\lambda \mu >4\). If \(\lambda \mu \le \lambda +\mu \) and \(\dim \mathcal {H}\ge 2\) or if \(\lambda \mu >\lambda +\mu \), then there are a \(\lambda \)-relaxed cutter T and a \(\mu \)-relaxed cutter U such that UT is not a relaxed cutter.
-
(v)
If \(\lambda \mu \ge \lambda +\mu \), then there are a \(\lambda \)-relaxed cutter T and a \(\mu \)-relaxed cutter U such that \( \textrm{Fix}UT\ne \textrm{Fix}T\cap \textrm{Fix}U\).
-
(vi)
Suppose that T and U satisfy the demi-closedness principle. If \(4\ne \lambda \mu < \lambda +\mu \), then the operators UT and \((UT)_{1/\nu ^{*}}\) also satisfy the demi-closedness principle.
Proof
Let \(x\in \mathcal {H}\) and \(z\in \textrm{Fix}T\cap \textrm{Fix}U\) be arbitrary. Denote \(a:=T(x)-x\) and \(b:=UT(x)-T(x)\). It follows from (9) that \(\langle z-x,a\rangle \ge \frac{1}{\lambda }\Vert a\Vert ^{2}\) and \(\langle z-T(x),b\rangle \ge \frac{1}{\mu }\Vert b\Vert ^{2}\). Thus, for relaxed cutters T and U inequalities (31)-(34) hold for \(y=z\) which proves (i). This and inequality (35) gives
where the sign \({\mp }\) should be replaced by − if \(0< \nu ^{*}< 2\) and by \(+\) if \(\nu ^{*}\ge 2\) or \(\nu ^{*}<0\). The proof of (ii)-(v) is similar to the proof of Theorem 3.6.
(vi) Let \(4\ne \lambda \mu < \lambda +\mu \). If \(\max \{\lambda ,\mu \}< 2\), then T, U are SQNE and UT satisfies the demi-closedness principle [16, Th. 4.2]. Suppose that \(\max \{\lambda ,\mu \}\ge 2\). Then, \(\nu (\lambda ,\mu )\ge 2\) or \(\nu (\lambda ,\mu )< 0\), as it was observed before. In this case, the sign \({\mp }\) in (46) should be replaced by \(+\). Let \(z\in \textrm{Fix}T\) be fixed, \(\{x^{k}\}_{k=0}^{\infty }\) be a bounded sequence with \(\Vert UT(x^{k})-x^{k}\Vert \rightarrow 0\), \(y\in \mathcal {H}\) be its weak cluster point and let \(\{x^{n_{k}}\}_{k=0}^{\infty } \) be its subsequence such that \(x^{n_{k}}\rightharpoonup y\). We prove that \(y\in \textrm{Fix}UT\). Note that \(T_{\lambda ^{-1}}\) is a cutter and \(\textrm{Fix}T_{\lambda ^{-1}}=\textrm{Fix}T\). By [15, Cor. 2.1.37],
i.e. \(\Vert T(x^{k})-x^{k}\Vert \) is bounded. Similarly as before, denote \( a^{k}:=T(x^{k})-x^{k}\) and \(b^{k}:=UT(x^{k})-T(x^{k})\). Let \(\{x^{m_{k}}\}_{k=0}^{\infty }\subseteq \{x^{n_{k}}\}_{k=0}^{\infty }\) be such that \(\Vert a^{m_{k}}\Vert \rightarrow \alpha \) for some \(\alpha \ge 0\). We prove that \(\alpha =0\). Suppose that the opposite holds, i.e. \(\alpha >0 \). By setting \(x=x^{m_{k}}\) in (46), we obtain
consequently,
Because \(a^{k}+b^{k}=UT(x^{k})-x^{k}\rightarrow 0\), it holds \(b^{k}=-a^{k}+d^{k}\) with \(d^{k}\rightarrow 0\), thus \(\Vert b^{m_{k}}\Vert \rightarrow \alpha \). By the triangle inequality,
This yields
consequently, \(\sqrt{\frac{1}{\lambda }-\frac{1}{\nu ^{*}}}=\sqrt{\frac{1}{\mu }-\frac{1}{\nu ^{*}}}\) which yields \(\lambda =\mu \ge 2\), a contradiction to the assumption \(\lambda \mu < \lambda +\mu \). Thus, \(\alpha =0\), i.e. \(\Vert T(x^{m_{k}})-x^{m_{k}}\Vert =\Vert a^{m_{k}}\Vert \rightarrow 0\) and \(\Vert UT(x^{m_{k}})-T(x^{m_{k}})\Vert =\Vert b^{m_{k}}\Vert \rightarrow 0\). Because T satisfies the demi-closedness principle, \(y\in \textrm{Fix}T\). Moreover \( y^{m_{k}}:=T(x^{m_{k}})=a^{m_{k}}+x^{m_{k}}\rightharpoonup y\). Because U satisfies the demi-closedness principle, \(y\in \textrm{Fix}U\). Thus, \(y\in \textrm{Fix}UT\), i.e. UT satisfies the demi-closedness principle. Consequently, \((UT)_{1/\nu ^{*}}\) also satisfies the demi-closedness principle as a relaxation of an operator satisfying the demi-closedness principle.\(\square \)
Theorem 3.8 can be presented in terms of demicontractions instead of relaxed cutters.
Corollary 3.9
Let \(\alpha ,\beta \in (-\infty ,1)\), \(T:\mathcal {H}\rightarrow \mathcal {H}\) be an \(\alpha \)-demicontraction, \(U:\mathcal {H}\rightarrow \mathcal {H}\) be a \(\beta \)-demicontraction, and let \(\textrm{Fix}T\cap \textrm{Fix}U\ne \emptyset \).
-
(i)
If \(\alpha +\beta < \alpha \beta \), then UT is a \(\gamma ^{*}\)-demicontraction, where \(\gamma ^{*}\) is given by (44). If, additionally,
-
(a)
\(\alpha ,\beta < 0\) then \(\gamma ^{*}<0\) and UT is \(-\gamma ^{*}\)-SQNE.
-
(b)
\(\alpha \beta < 0\) then \(\gamma ^{*}\in (0,1)\).
Moreover, if \(\dim \mathcal {H}\ge 2\), then the constant \(\gamma ^{*}\) is optimal, i.e., for arbitrary \(\rho \in (-\infty ,\gamma ^{*})\) there are an \(\alpha \)-demicontraction T and a \(\beta \)-demicontraction U such that UT is not a \(\rho \)-demicontraction.
-
(a)
-
(ii)
If \(\alpha +\beta < 0\), then \(\textrm{Fix}UT=\textrm{Fix}T\cap \textrm{Fix}U\).
-
(iii)
Suppose that \(\alpha +\beta >\alpha \beta \). If \(\alpha +\beta \le 0\) and \(\dim \mathcal {H}\ge 2\) or if \(\alpha +\beta >0\), then there are an \(\alpha \)-demicontraction T and a \(\beta \)-demicontraction U such that UT is not a demicontraction.
-
(iv)
If \(\alpha +\beta \ge 0\), then there are an \(\alpha \)-demicontraction T and a \(\beta \)-demicontraction U such that \(\textrm{Fix}UT\ne \textrm{Fix}T\cap \textrm{Fix}U\).
-
(v)
Suppose that T and U satisfy the demi-closedness principle. If \(\alpha +\beta < 0\), then the operators UT and \((UT)_{1/\nu ^{*}}\) also satisfy the demi-closedness principle.
Let \(\lambda ,\mu >0\) be such that \(\lambda \mu < 4\), \(T:\mathcal {H} \rightarrow \mathcal {H}\) be a \(\lambda \)-relaxed cutter, \(U:\mathcal {H} \rightarrow \mathcal {H}\) be a \(\mu \)-relaxed cutter (equivalently, let \(T: \mathcal {H}\rightarrow \mathcal {H}\) be an \(\alpha \)-demicontraction, \(U: \mathcal {H}\rightarrow \mathcal {H}\) be a \(\beta \)-demicontraction, where \(\alpha ,\beta \in (-\infty ,1)\) are such that \(\alpha +\beta < \alpha \beta \) ) with \(\textrm{Fix}T\cap \textrm{Fix}U\ne \emptyset \), both satisfying the demi-closedness principle. Theorem 3.8 (equivalently, Corollary 3.9) together with Proposition 2.10 and the fact that \((UT)_{1/\nu ^{*}}\) is a cutter yield the weak convergence of sequences \(x^{k+1}=(UT)_{\lambda _{k}/\nu ^{*}}(x^{k})\) to some \(x^{*}\in \textrm{Fix}T\cap \textrm{Fix}U\), where \(\lambda _{k}\in [ \varepsilon -2-\varepsilon ]\) for some small \(\varepsilon >0\). In Section 4, we show that an enlarged range of \(\lambda _{k}\) guarantees the weak convergence (see Theorem 4.5 and Corollary 4.6).
Let \(T_{i}:\mathcal {H}\rightarrow \mathcal {H}\) be an \(\alpha _{i}\)-demicontraction where \(\alpha _{i}\in (-\infty ,1)\smallsetminus \{0\}\), \(i\in I:=\{1,2,...,m\}\). Define \(T:=T_{m}T_{m-1}...T_{1}\) and denote
\(k=1,2,...,m\). The following Theorem extends [15, Th. 2.1.48], where the case \(\alpha _{i}< 0\), \(i\in I\), is considered.
Theorem 3.10
Let \(\alpha _{i}\in (-\infty ,1)\smallsetminus \{0\}\), \(i\in I\), where \(\alpha _{i}>0\) for at most one \(i\in I\). Suppose that \(T_{i}:\mathcal {H}\rightarrow \mathcal {H}\), \(i\in I\), are \(\alpha _{i}\)-demicontractions that share a common fixed point. If \(\gamma _{m}<1\), then the operator T is a \(\gamma _{m}\)-demicontraction and \(\textrm{Fix}T=\bigcap _{i=1}^{m}\textrm{Fix}T_{i}\). If, moreover, \(T_{i}\), \(i\in I\), satisfy the demi-closedness principle, then the operator T also satisfies the demi-closedness principle.
Proof
Consider two cases:
(a) \(\alpha _{i}< 0\) for all \(i\in I\). Then, \(T_{i}\) is \(-\alpha _{i}\)-SQNE, \(i\in I\), and it follows from [15, Th. 2.1.48] that T is \(-\gamma _{m}\)-SQNE which means that T is a \(\gamma _{m}\)-demicontraction. Moreover, [4, Prop. 2.10(i)] yields \(\textrm{Fix}T=\bigcap _{i=1}^{m}\textrm{Fix}T_{i}\). If all \(T_{i}\), \(i\in I\), satisfy the demi-closedness principle, then [16, Th. 4.2] yields that T also satisfies the demi-closedness principle.
(b) \(\alpha _{j}>0\) for some \(j\in I\). Then, \(\alpha _{i}< 0\) for all \(i\ne j\). Suppose that \(\gamma _{m}< 1\). Denote
We have
Note that \(\gamma _{j-1}< 0\), \(\beta _{j+1}< 0\) and
Thus,
By (a), \(U_{j+1}\) is a \(\beta _{j+1}\)-demicontraction with \(\beta _{j+1}< 0\), \(\textrm{Fix}U_{j+1}=\bigcap _{i=j+1}^{m}\textrm{Fix}T_{i}\), \(V_{j-1}\) is a \(\gamma _{j-1}\)-demicontraction with \(\gamma _{j-1}< 0\) and \(\textrm{Fix}V_{j-1}=\bigcap _{i=1}^{j-1}\textrm{Fix}T_{i}\). If \(T_{i},\) \(i=1,2,...,j-1\), satisfy the demi-closedness principle, then [16, Th. 4.2] yields that \(V_{j-1}\) also satisfies the demi-closedness principle. Because \(\gamma _{j-1}\alpha _{j}< 0\), (48) yields
Now, Corollary 3.9(i)-(ii) yields that \(V_{j}\) is a \(\gamma _{j}\)-demicontraction with \(\gamma _{j}\in (0,1)\) and
If \(T_{i},\) \(i=1,2,...,j\), satisfy the demi-closedness principle, then Corollary 3.9(v) yields that \(V_{j}\) also satisfies the demi-closedness principle as composition of \(T_{j}\) and \(V_{j-1}\) satisfying (49). Because \(\beta _{j+1}\gamma _{j}< 0\), it holds
Applying Corollary 3.9(i)-(ii) again, we obtain that \( T=U_{j+1}V_{j}\) is a \(\gamma _{m}\)-demicontraction and
Finally, if \(T_{i},\) \(i\in I\), satisfy the demi-closedness principle, then [16, Th. 4.2] yields that \(U_{j+1}\) also satisfies the demi-closedness principle and Corollary 3.9(v) yields that T also satisfies the demi-closedness principle as composition of \(U_{j+1}\) and \(V_{j}\) satisfying (50).\(\square \)
3.3 Extrapolation of composition of demicontractions
Let \(\lambda ,\mu >0\) be such that \(\lambda \mu < 4\). In Theorem 3.8, we proved that for composition of \(\lambda \)- and \(\mu \)-relaxed cutters T and U, the operator UT is a \(\nu ^{*}\)-relaxed cutter, where the constant \(\nu ^{*}\) is given by (24). Moreover, we proved that for \(\rho \in (0,\nu ^{*})\) the operator UT need not to be a \(\rho \)-relaxed cutter. It turns out that if we allow \(\rho \) to depend on T, U and x then we can decrease \(\rho \) for which UT is a \(\rho \)-relaxed cutter. Applying this property in corresponding algorithms, we are able to enlarge the step size \(\Vert x^{k+1}-x^{k}\Vert \) without loss of the Fejér monotonicity of \(\{x^{k}\}_{k=0}^{\infty }\). This can lead to a faster convergence of \(x^{k}\) to a solution. We start with the definition of a generalized relaxation of an operator.
Definition 3.11
Let \(\sigma :\mathcal {H}\rightarrow (0,+\infty )\) and let \(S:\mathcal {H}\rightarrow \mathcal {H}\) be an operator. We call the operator \(S_{\sigma }:\mathcal {H}\rightarrow \mathcal {H}\) defined by
a generalized relaxation of S and \(\sigma \) is called a relaxation function. If \(\sigma (x)\ge 1\) for all \(x\in \mathcal {H}\) and \(\sigma (x)>1\) for at least one \(x\notin \textrm{Fix}S\), then \(S_{\sigma }\) is called an extrapolation of S and \(\sigma \) is called an extrapolation function. If S is a cutter, then \(S_{\sigma }\) is called a generalized \(\sigma \)-relaxed cutter.
If the function \(\sigma \) is constant, then the above definition coincides with the classical definition of a relaxation. Clearly, in the case of generalized relaxation, the constant \(\lambda \) in inequality (9) should be replaced by \(\sigma (x)\).
Extrapolations of FNE operators as well as of cutters have been successfully applied in many papers, e.g., in [25, 42] (extrapolation of simultaneous projection), [17, 21, 33, 35] (extrapolation of a Landweber type operator) or [18] (extrapolation of cyclic projection).
In this and in the next section, we answer the following questions:
-
1.
Let T and U be SPCs with \(\textrm{Fix}(UT)\ne \emptyset \). What should be supposed on the extrapolation function \(\sigma :\mathcal {H}\rightarrow (0,+\infty )\) in order to receive the weak convergence of sequences \(x^{k}\) generated by the iteration \(x^{k+1}=(UT)_{\sigma }(x^{k})\), \(x^{0}\in \mathcal {H}\), to a fixed point of UT?
-
2.
Let T and U be demicontractions with \(\textrm{Fix}T\cap \textrm{Fix}U\ne \emptyset \). What should be supposed on the extrapolation function \(\sigma :\mathcal {H}\rightarrow (0,+\infty )\) in order to receive the weak convergence of sequences \(x^{k}\) generated by the iteration \(x^{k+1}=(UT)_{\sigma }(x^{k})\), \(x^{0}\in \mathcal {H}\), to a common fixed point of U and T?
Before we formulate our main result of this section, we prove the following Lemma.
Lemma 3.12
Let \(\lambda ,\mu >0\) be such that \(\lambda \mu < 4\) and \(a,b\in \mathcal {H}\) be such that \(\Vert a\Vert ^{2}+\Vert b\Vert ^{2}>0\). Then,
and
Proof
Inequality (51) is clear if \(\langle a,b\rangle \ge 0\). If \(\langle a,b\rangle < 0\), then it follows from the properties of the inner product and from the assumption that
Moreover, \(\lambda +\mu -\lambda \mu >0\), because \(\lambda \mu < 4\) (see Appendix). A direct calculus shows that
where the sign ± should be replaced by \(+\) if \((\lambda -2)(\mu -2)\le 0\) and by − if \((\lambda -2)(\mu -2)>0\). This proves inequality (52) which completes the proof.\(\square \)
Similarly as before, for operators T and U with \(\textrm{Fix}(UT)\ne \emptyset \) and for \(x,y\in \mathcal {H}\) denote \(a_{1}:=T(x)-x\), \(a_{2}:=T(y)-y\), \(b_{1}:=UT(x)-T(x)\), \(b_{2}:=UT(y)-T(y)\). Moreover, for \(\lambda ,\mu >0\) with \(\lambda \mu < 4\) denote
By Lemma 3.12 with \(a:=a_{1}-a_{2}\) and \(b:=b_{1}-b_{2}\) and by the definition of of \(\nu ^{*}\) given by (24), the function \(\tau ^{*}\) is well defined and \(0< \tau ^{*}(x,y)\le \nu ^{*}\). Moreover, for \(y=z\in \textrm{Fix}(UT)\),
because \(a_{2}+b_{2}=UT(z)-z=0\).
Theorem 3.13
Let \(\lambda ,\mu >0\) with \(\lambda \mu < 4\), T be \(\lambda \)-RFNE and U be \(\mu \)-RFNE with \(\textrm{Fix}(UT)\ne \emptyset \). Let \(x\in \mathcal {H}\) and \(z\in \textrm{Fix}(UT)\) be fixed and the function \(\tau :\mathcal {H}\rightarrow (0,+\infty )\) be such that
for \(x\notin \textrm{Fix}(UT)\). Then, the operator UT is a generalized \(\tau \)-relaxed cutter, consequently, \((UT)_{1/\tau }\) is a cutter which is an extrapolation of the cutter \((UT)_{1/\nu ^{*}}\). Moreover, \((UT)_{1/\tau }\) satisfies the demi-closedness principle.
Proof
Let \(x\in \mathcal {H}\). By Lemma 3.12 with \(a:=a_{1}-a_{2}\) and \(b:=b_{1}-b_{2}\), there is a function \(\tau \) satisfying (54). Note that for \(y=z\in \textrm{Fix}(UT)\) it holds \(a_{2}+b_{2}=UT(z)-z=0\). We prove that UT is a generalized \(\tau (x)\)-relaxed cutter, i.e.,
For \(z\in \textrm{Fix}(UT)\) we have
Thus, Theorem 3.6(i) with \(y=z\) and \(\nu =\tau (x)>0\) yields that it is enough to prove that
If \(x\notin \textrm{Fix}(UT)\), then (55) is equivalent to
Consequently, UT is a generalized \(\tau \)-relaxed cutter and \((UT)_{1/\tau }\) is a cutter. This and the second inequality in (54) yield that \((UT)_{1/\tau }\) is an extrapolation of \((UT)_{1/\nu ^{*}}\). By Theorem 3.6(ii), UT is \(\nu ^{*}\)-RFNE, thus \((UT)_{1/\nu ^{*}}\) is a FNE. Because \(\textrm{Fix}(UT)\ne \emptyset \), this yields that \((UT)_{1/\nu ^{*}}\) is a cutter. Moreover, \((UT)_{1/\nu ^{*}}\) satisfies the demi-closedness principle as an NE operator; thus, \((UT)_{1/\tau }\) also satisfied the demi-closedness principle as an extrapolation of \((UT)_{1/\nu ^{*}}\).\(\square \)
In order to apply Theorem 3.13, we should be able to evaluate \(\tau ^{*}(x,z)\) for some \(z\in \textrm{Fix}UT\). However, in general, this is a hard task because we do not know \(z\in \textrm{Fix}(UT)\) explicitly. Nevertheless, in some cases, one can define a function \(\tau (x)\) satisfying (54) without knowledge of \(z\in \textrm{Fix}(UT)\). This function can be applied for a construction of a cutter which is an extrapolation of the cutter \((UT)_{1/\nu ^{*}}\).
Example 3.14
Suppose that \(\lambda \in [ 1,4)\), \(\mu =1\). Then, obviously, \(\lambda \mu < 4\). Furthermore, let \(T:=(P_{A})_{\lambda }\), where \(A\subseteq \mathcal {H}\) is closed convex, \(U:=P_{B}\), where B is a closed affine subspace and \(\textrm{Fix}(P_{B}P_{A})\ne \emptyset \). It is easily seen that \(\textrm{Fix}(UT)=\textrm{Fix}(P_{B}P_{A})\). Let \(z\in \textrm{Fix}(P_{B}P_{A})\) be arbitrary, \(w:=Tz\) and \(d:=z-P_{A}(z)\). Then, \(\Vert d\Vert \) is the distance between A and B. We prove that
-
(i)
For \(x\in B\), it holds that
$$\begin{aligned} \tau ^{*}(x,z)=\left\{ \begin{array}{ll} \frac{\Vert a_{1}+b_{1}\Vert ^{2}}{\frac{1}{\lambda }\Vert a_{1}\Vert ^{2}+\Vert b_{1}\Vert ^{2}+\langle a_{1},b_{1}\rangle +\lambda \Vert d\Vert ^{2}-2\langle b_{1},d\rangle }\text {, } &{} \text {if }x\notin \textrm{Fix}(UT)\text {,} \\ 1\text {,} &{} \text {otherwise.} \end{array} \right. \end{aligned}$$(56) -
(ii)
For
$$\begin{aligned} \bar{\tau }(x):=\left\{ \begin{array}{ll} \frac{\Vert a_{1}+b_{1}\Vert ^{2}}{\frac{1}{\lambda }\Vert a_{1}\Vert ^{2}+\Vert b_{1}\Vert ^{2}+\langle a_{1},b_{1}\rangle -\frac{1}{\lambda } \Vert b_{1}\Vert ^{2}}\text {,} &{} \text {if }x\notin \textrm{Fix}(UT)\text {,} \\ 1\text {,} &{} \text {otherwise,} \end{array} \right. \end{aligned}$$(57)where \(x\in B\), it holds \(\bar{\tau }(x)\ge \tau ^{*}(x,z)\) and the operator UT is a generalized \(\bar{\tau }\)-relaxed cutter; consequently, \( (UT)_{1/\bar{\tau }}\) is a cutter.
-
(iii)
For \(\hat{\tau }:=\min \{\bar{\tau },\nu ^{*}\}\), where \(\nu ^{*}=\nu ^{*}(\lambda ,1)\) the operator UT is a generalized \(\hat{\tau }\)-relaxed cutter and \((UT)_{1/\hat{\tau }}\) is a cutter which is an extrapolation of the cutter \((UT)_{1/\nu ^{*}}\). Moreover, \((UT)_{1/\hat{\tau }}\) satisfies the demi-closedness principle.
Proof
Let \(x\in B\). For \(y=z\in \textrm{Fix}(UT)\) we have \(b_{2}=-a_{2}\). Moreover,
Let \(x\in B\setminus \textrm{Fix}(UT)\). We have \(UT(x)=P_{B}T(x)\in B\) and \(z=P_{B}(w)\). These facts, the properties of the metric projection, and the affinity of B yield
and
i.e. \(\langle a_{1},d\rangle =-\langle b_{1},d\rangle \) and \(\langle a_{1},b_{1}\rangle =-\Vert b_{1}\Vert ^{2}\). Moreover, \(\lambda \Vert d\Vert ^{2}-2\Vert b_{1}\Vert \cdot \Vert d\Vert \ge -\frac{1}{\lambda }\Vert b_{1}\Vert ^{2}\), because the function \(f(\xi ):=\lambda \xi ^{2}-2\beta \xi \) attains its minimum at \(\xi =\beta /\lambda \) equal to \(-\beta ^{2}/\lambda \). These facts yield
Part (i) follows from equalities (58)-(60) and from (53). Note that \(\Vert a_{1}\Vert >\Vert b_{1}\Vert \), because \(x\in B{\setminus } \textrm{Fix}(UT)\), consequently, \(\frac{1}{\lambda }\Vert a_{1}\Vert ^{2}+\Vert b_{1}\Vert ^{2}+\langle a_{1},b_{1}\rangle -\frac{1}{\lambda }\Vert b_{1}\Vert ^{2}>0\). Thus, \(\bar{\tau }\) is well defined and inequalities (61)-(62) show that \(\bar{\tau }(x)\ge \tau ^{*}(x,z)\). This shows that UT is a generalized \(\bar{\tau }\)-relaxed cutter, consequently, \((UT)_{1/\bar{\tau }}\) is a cutter. This proves part (ii).
Unfortunately, \(\bar{\tau }(x)\) needs not to satisfy \(\bar{\tau }(x)\le \nu ^{*}(\lambda ,1)\), thus, \((UT)_{1/\bar{\tau }}\) needs not to be an extrapolation of \((UT)_{1/\nu ^{*}}\). Thus, we introduce the function \(\hat{\tau }:=\min \{\bar{\tau },\nu ^{*}\}\), where \(\nu ^{*}=\nu ^{*}(\lambda ,1)\), which obviously satisfies \(\tau ^{*}(x,z)\le \hat{\tau }(x)\le \nu ^{*}(\lambda ,1)\). Similarly as before, this yields, that \((UT)_{1/\hat{\tau }}\) is a cutter which is an extrapolation of the cutter \((UT)_{1/\nu ^{*}}\) and satisfies the demi-closedness principle.\(\square \)
If \(\textrm{Fix}T\cap \textrm{Fix}U\ne \emptyset \), then the function \(\tau ^{*}\) can be evaluated without knowledge of \(z\in \textrm{Fix}T\cap \textrm{Fix}U\), because for \(y=z\in \textrm{Fix}T\cap \textrm{Fix}U\) we have \(a_{2}=b_{2}=0\). Consequently, for \(x\notin \textrm{Fix}T\cap \textrm{Fix}U\) and for arbitrary \(z\in \textrm{Fix}T\cap \textrm{Fix}U\) we have
In this case it enough to suppose that T and U are relaxed cutters satisfying the demi-closedness principle instead of being RFNE operators.
Corollary 3.15
Let \(\lambda ,\mu >0\) with \(\lambda \mu < 4\), T be a \(\lambda \)-relaxed cutter and U be a \(\mu \)-relaxed cutter with \(\textrm{Fix}T\cap \textrm{Fix}U\ne \emptyset \). Let \(x\in \mathcal {H}\) be arbitrary and the function \(\tau :\mathcal {H}\rightarrow (0,+\infty )\) be such that
for \(x\notin \textrm{Fix}T\cap \textrm{Fix}U\), where \(\tau ^{*}(x)\) is given by (63). Then, the operator UT is a generalized \(\tau \)-relaxed cutter, consequently, \((UT)_{1/\tau }\) is a cutter which is an extrapolation of the cutter \((UT)_{1/\nu ^{*}}\). Moreover, if T and U satisfy the demi-closedness principle, then \((UT)_{1/\tau }\) also satisfies the demi-closedness principle.
4 Convergence properties of algorithms employing strict pseudocontractions and demicontractions
Let \(T,U:\mathcal {H}\rightarrow \mathcal {H}\) be two relaxed cutters (equivalently, T, U are two demicontractions) with \(\textrm{Fix}(UT)\ne \emptyset \). For a relaxation function \(\sigma :\mathcal {H}\rightarrow (0,+\infty )\) we define
a \(\sigma \)-generalized relaxation of UT. We consider the iteration
where \(x^{0}\in \mathcal {H}\) is arbitrary and the relaxation parameter \(\lambda _{k}\in [ \varepsilon ,2-\varepsilon ]\) for some small \(\varepsilon >0\). In this section we give conditions under which sequences generated by iteration (65) converge weakly to an element of \(\textrm{Fix}(UT)\ne \emptyset \). We use the same notation as in Subsection 3.3.
Theorem 4.1
Let \(\lambda ,\mu >0\) be such that \(\lambda \mu < 4\), \(T:\mathcal {H}\rightarrow \mathcal {H}\) be \(\lambda \)-RFNE and \(U:\mathcal {H}\rightarrow \mathcal {H}\) be \(\mu \)-RFNE with \(\textrm{Fix}(UT)\ne \emptyset \). Then, the sequence \(\{x^{k}\}_{k=0}^{\infty }\) generated by iteration (65), where \(\sigma =1/\tau \) with \(\tau \) satisfying (54) for all \(x\in \mathcal {H}\) and for some \(z\in \textrm{Fix}(UT)\) converges weakly to an element of \(\textrm{Fix}(UT)\).
Proof
The theorem follows directly from Theorem 3.13 and from Proposition 2.10.
\(\square \)
Setting \(\tau (x)=\nu ^{*}\) for \(x\notin \textrm{Fix}(UT)\) in Theorem 4.1 we receive the following result.
Corollary 4.2
Let \(\lambda ,\mu >0\) be such that \(\lambda \mu < 4\), \(T:\mathcal {H}\rightarrow \mathcal {H}\) be \(\lambda \)-RFNE and \(U:\mathcal {H}\rightarrow \mathcal {H}\) be \(\mu \)-RFNE with \(\textrm{Fix}(UT)\ne \emptyset \). Then, the sequence \(\{x^{k}\}_{k=0}^{\infty }\) generated by the iteration
where \(x^{0}\in \mathcal {H}\), \(\lambda _{k}\in [ \varepsilon ,2-\varepsilon ]\) for some small \(\varepsilon >0\) and \(\nu ^{*}\) is defined by (24), converges weakly to an element of \(\textrm{Fix}(UT)\).
We call the iteration (66) a relaxed alternating strict pseudocontraction (RASPC) method.
Remark 4.3
If \(\lambda =\mu =2\), \(T:=(P_{A})_{\lambda }\) and \(U:=(P_{B})_{\mu }\), then \(V:=(UT)_{\rho }\) with \(\rho =\frac{1}{2}\) is, actually, the Douglas–Rachford operator which is FNE. Thus, Theorem 4.1 extends the convergence of the Douglas–Rachford method to the case \(\lambda \mu < 4\).
Applying Proposition 2.3, Theorem 4.1 can be equivalently formulated as follows.
Corollary 4.4
Let \(\alpha ,\beta \in (-\infty ,1)\) be such that \(\alpha +\beta < \alpha \beta \), \(T:\mathcal {H}\rightarrow \mathcal {H}\) be an \(\alpha \)-SPC and \(U:\mathcal {H}\rightarrow \mathcal {H}\) be a \(\beta \)-SPC with \(\textrm{Fix}(UT)\ne \emptyset \). Then, the sequence \(\{x^{k}\}_{k=0}^{\infty }\) generated by iteration (65), where the generalized relaxation function \(\sigma =1/\tau \) with \(\tau \) satisfying
for arbitrary \(x\in \mathcal {H\setminus }\textrm{Fix}(UT)\) and some \(y=z\in \textrm{Fix}(UT)\), converges weakly to an element of \(\textrm{Fix}UT\).
Theorem 4.5
Let \(\lambda ,\mu >0\), \(T:\mathcal {H}\rightarrow \mathcal {H} \) be a \(\lambda \)-relaxed cutter and \(U:\mathcal {H}\rightarrow \mathcal {H}\) be a \(\mu \)-relaxed cutter with \(\textrm{Fix}T\cap \textrm{Fix}U\ne \emptyset \). Suppose that T and U satisfy the demi-closedness principle. If \(\lambda \mu < 4\), then the sequence \(\{x^{k}\}_{k=0}^{\infty }\) generated by iteration (65), where \(\sigma =1/\tau \) with \(\tau \) satisfying (64) and \(\tau ^{*}(x)\) defined by (63) for all \(x\in \mathcal {H}\), converges weakly to an element of \(\textrm{Fix}T\cap \textrm{Fix}U\).
Proof
Suppose that \(\lambda \mu < 4\). By Corollary 3.15, \((UT)_{\sigma }\) is a cutter which is an extrapolation of the cutter \((UT)_{1/\nu ^{*}}\) and \((UT)_{\sigma }\) satisfies the demi-closedness principle. The remaining part follows from Proposition 2.10.\(\square \)
We call iteration (65), where \(\sigma =1/\tau \) with \(\tau \) satisfying (64) and \(\tau ^{*}(x)\) defined by (63) an extrapolated alternating demicontraction (EADC) method.
Theorem 4.5 can be equivalently formulated as follows.
Corollary 4.6
Let \(\alpha ,\beta \in (-\infty ,1)\), \(T:\mathcal {H}\rightarrow \mathcal {H}\) be an \(\alpha \)-demicontraction and \(U:\mathcal {H}\rightarrow \mathcal {H}\) be a \(\beta \)-demicontraction with \(\textrm{Fix}T\cap \textrm{Fix}U\ne \emptyset \). Suppose that T and U satisfy the demi-closedness principle. If \(\alpha +\beta < \alpha \beta \), then the sequence \(\{x^{k}\}_{k=0}^{\infty }\) generated by the iteration (65), where \(\sigma =1/\tau \) with \(\tau \) satisfying
for arbitrary \(x\in \mathcal {H\setminus }\textrm{Fix}(UT)\) converges weakly to an element of \(\textrm{Fix}T\cap \textrm{Fix}U\).
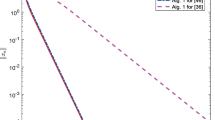
Contrary to Theorem 4.5 and Corollary 4.6, in Theorem 4.1 and in Corollary 4.4 we do not suppose that \(\textrm{Fix}T\cap \textrm{Fix}U\ne \emptyset \). We only suppose that \(\textrm{Fix}(UT)\ne \emptyset \). In the case of the Douglas–Rachford operator, i.e. \(T=2P_{A}-\textrm{Id}\) and \(U=2P_{B}-\textrm{Id}\) for closed convex subsets \(A,B\subseteq \mathcal {H}\) it is well known that \(\textrm{Fix}(UT)\ne \emptyset \) if and only if \(A\cap B\ne \emptyset \) [1, Prop. 7]. The first part of the proposition below extends [1, Prop. 7], where the case \(\lambda =\mu =2\) was proved, and is a special case of [27, Lemma 4.1(iii)]. The second part shows that for \(\lambda +\mu \ne \lambda \mu \) the nonemptiness of \(\textrm{Fix}(UT)\) is also possible if \(A\cap B=\emptyset \).
Proposition 4.7
Let \(\lambda ,\mu >0\), \(A,B\subseteq \mathcal {H}\) be nonempty, closed and convex, \(T:=(P_{A})_{\lambda }\), \(U:=(P_{B})_{\mu }\) and \(V:=UT\).
-
(i)
If \(\lambda +\mu =\lambda \mu \) then
$$\begin{aligned} \textrm{Fix}V\ne \emptyset \Longleftrightarrow A\cap B\ne \emptyset \text {;} \end{aligned}$$(68)If, moreover, \(A\cap B\ne \emptyset \), then
$$\begin{aligned} P_{A}(\textrm{Fix}V)=A\cap B\text {.} \end{aligned}$$(69) -
(ii)
If \(\lambda +\mu \ne \lambda \mu \), then there are A, B with \(A\cap B=\emptyset \) and \(\textrm{Fix}V\ne \emptyset \).

Behavior of DR method and RASPC metod
Proof
(i) Suppose that \(\lambda +\mu =\lambda \mu \). Clearly, \(A\cap B\subseteq \textrm{Fix}V\), so, if \(A\cap B\ne \emptyset \), then \(\textrm{Fix}V\ne \emptyset \). Suppose that \(\textrm{Fix}V\ne \emptyset \). By \(V=(\mu P_{B}+(1-\mu )\textrm{Id})(P_{A})_{\lambda }\) and by \(\lambda +\mu =\lambda \mu \),
This yields \(A\cap B\ne \emptyset \) which proves (68). Now we prove (69). If \(x\in A\cap B\), then \(x\in \textrm{Fix}V\) and \(P_{A}(x)=x\), thus \(x\in P_{A}(\textrm{Fix}V)\). Let now \(x\in P_{A}(\textrm{Fix}V)\). Then, \(x\in A\) and there is \(z\in \textrm{Fix}V\) such that \(x=P_{A}(z)\). By (70), \(P_{B}(P_{A})_{\lambda }(z)=x\), thus \(x\in B\). This proves (69).
(ii) Suppose that \(\lambda +\mu \ne \lambda \mu \). Let \(A,B\subseteq \mathcal {H}\) be two disjoint hyperplanes. Let \(a\in A\) and \(b:=P_{B}(a)\). If we set
then we obtain \(V(x)=x\).\(\square \)
Example 4.8
Let \(A,B\subseteq \mathcal {H}\) be nonempty closed convex subsets that share a common point, \(T=(P_{A})_{\lambda }\) and \(U=(P_{B})_{\mu }\), where \(\lambda ,\mu >0\) and \(\lambda +\mu =4\). In particular, if \(\lambda =\mu =2\) then UT is NE and \((UT)_{\frac{1}{2}}\) is, actually, the Douglas–Rachford operator. Now suppose that \(\lambda ,\mu \ne 2\). We have \(\lambda \mu < 4\) and \(\nu ^{*}=\nu (\lambda ,\mu )=4\). By Theorem 3.6(ii)–(iii) the operator UT is 4-RFNE and \(\textrm{Fix}UT=A\cap B\), consequently, the operator V defined by
is FNE with \(\textrm{Fix}V=A\cap B\) and the sequence \(\{x^{k}\}_{k=0}^{\infty }\) generated by the iteration
where \(x^{0}\in \mathcal {H}\) is arbitrary and \(\sigma _{k}\in [\varepsilon ,2-\varepsilon ]\) for some \(\varepsilon \in (0,1)\) converges weakly to some \(z\in \textrm{Fix}V\). By Corollary 4.6, the convergence also holds if T and U are demicontractions (equivalently, relaxed cutters) with \(\textrm{Fix}T=A\) and \(\textrm{Fix}U=B\) which satisfy the demi-closedness principle. By Theorem 4.1, the convergence also holds if we suppose that T and U are RFNE (or, equivalently, SPC) with \(\textrm{Fix}(UT)\ne \emptyset \) (even if \(A\cap B=\emptyset \)). On Fig. 2, we compare the behavior of the DR iteration and iteration (71) with \(\lambda =3\), \(\mu =1\) and \(\sigma _{k}=1\) (a relaxed alternating strict pseudocontraction method), where \(A,B\subseteq \mathcal {H}\) are two intersecting hyperplanes.
Example 4.9
Let \(A\subseteq \mathcal {H}\) be a ball and B be a hyperplane tangent to A, \(T:=(P_{A})_{\lambda },U:=(P_{B})_{\mu }\). On Fig. 3, we compare the behavior of the DR method with an extrapolated alternating demicontraction method \(x^{k+1}=(UT)_{1/\tau ^{*}}(x^{k})\) for \(\lambda =3\) and \(\mu =1,\) where \(\tau ^{*}\) is given by (63).

Behavior of DR method and EADC method
Example 4.10
Let us come back to Example 2.14 and to iteration (13), where \(\alpha ,\beta \in (-\infty ,1)\) and \(\lambda >0\). We suppose for simplicity, that \(\mu _{k}\) is constant, \(\mu _{k}=\mu >0\). Because T is an \(\alpha \)-demicontraction with \(\textrm{Fix}T=A^{-1}(\textrm{Fix} S)=A^{-1}(Q)\) and U is a \(\beta \)-demicontraction with \(\textrm{Fix}U=C\), Corollary 2.7 yields that \(T_{\lambda }\) is a \(\gamma \)-demicontraction with \(\gamma =1-\frac{1-\alpha }{\lambda }\) and \(U_{\mu }\) is a \(\delta \)-demicontraction with \(\delta =1-\frac{1-\beta }{\mu }\). Note that, contrary to Example 2.14, \(T_{\lambda }\) is not SQNE if \(\lambda >1-\alpha \) and \(U_{\mu }\) is not SQNE if \(\mu >1-\beta \). If \( \gamma +\delta < \gamma \delta \) then, by Corollary 3.9, \(U_{\mu }T_{\lambda }\) is a \(\nu \)-demicontraction with \(\nu =\frac{\gamma \delta }{\gamma +\delta }\). Now Corollary 4.6 yields that the operator \(V:=(U_{\mu }T_{\lambda })_{1/\tau }\) with \(\tau :=\frac{2(\gamma +\delta )}{\gamma +\delta -\gamma \delta }\)is a cutter and the sequence generated by the iteration \(x^{k+1}=V_{\lambda _{k}}(x^{k})\), where \(x^{0}\in \mathcal {H}\) is arbitrary and \(\lambda _{k}\in [ \varepsilon ,2-\varepsilon ]\) for some \(\varepsilon \in (0,1)\), converges weakly to an element of \(F:=C\cap A^{-1}(Q)\). Note that Moudafi supposed in [39] that \(\lambda \in (0,1-\alpha )\), \(\mu \in (0,1-\beta )\), \(\tau =1\) and \(\lambda _{k}=1\).
References
Aragón Artacho, F.J., Campoy, R., Tam, M.K.: The Douglas-Rachford algorithm for convex and nonconvex feasibility problems. Math. Meth. Oper. Res. 91, 201–240 (2020)
Baillon, J.B., Bruck, R.E., Reich, S.: On the asymptotic behavior of nonexpansive mappings and semigroups in Banach spaces. Houston J. Math. 4, 1–9 (1978)
Bartz, S., Dao, M.N., Phan, H.M.: Conical averagedness and convergence analysis of fixed point algorithms. J. Glob. Optim. 82, 351–373 (2022)
Bauschke, H.H., Borwein, J.: On projection algorithms for solving convex feasibility problems. SIAM Rev. 38, 367–426 (1996)
Bauschke, H.H., Combettes, P.L.: A weak-to-strong convergence principle for Fejér-monotone methods in Hilbert spaces. Math. Oper. Res. 26, 248–264 (2001)
Bauschke, H.H., Combettes, P.L.: Convex analysis and monotone operator theory in Hilbert spaces, 2nd edn. CMS Books in Mathematics, Springer, Cham (2017)
Bauschke, H.H., Bendit, T., Moursi, W.M.: How averaged is the composition of two linear projections?, to appear in Numerical Functional Analysis and Optimization, (2023). https://arxiv.org/abs/2303.13738
Berinde, V.: Approximating fixed points of enriched nonexpansive mappings by Krasnoselskij iteration in Hilbert spaces. Carpathian J. Math. 35, 293–304 (2019)
Berinde, V.: Approximating fixed points results for demicontractive mappings could be obtained from their quasi-nonexpansive counterparts. Carpathian J. Math. 39, 73–84 (2023)
Browder, F.E., Petryshyn, W.V.: Construction of fixed points of nonlinear mappings in Hilbert space. J. Math. Anal. Appl. 20, 197–228 (1967)
Bruck, R.E.: Random products of contractions in metric and Banach spaces. J. Math. Anal. Appl. 88, 319–332 (1982)
Bruck, R.E., Reich, S.: Nonexpansive projections and resolvents of accretive operators in Banach spaces. Houst. J. Math. 3, 459–470 (1977)
Byrne, C.: Iterative oblique projection onto convex sets and the split feasibility problem. Inverse Probl. 18, 441–453 (2002)
Byrne, C.: A unified treatment of some iterative algorithms in signal processing and image reconstruction. Inverse Probl. 20, 103–120 (2004)
Cegielski, A.: Iterative methods for fixed point problems in Hilbert spaces. Lecture Notes in Mathematics, vol. 2057. Springer, Heidelberg (2012)
Cegielski, A.: General method for solving the split common fixed point problem. J. Optim. Theory Appl. 165, 385–404 (2015)
Cegielski, A.: Landweber-type operator and its properties. Contemp. Math. 658, 139–148 (2016)
Cegielski, A., Censor, Y.: Extrapolation and local acceleration of an iterative process for common fixed point problems. J. Math. Anal. Appl. 394, 809–818 (2012)
Cegielski, A., Gibali, A., Reich, S., Zalas, R.: Outer approximation methods for solving variational inequalities defined over the solution set of a split convex feasibility problem. Numer. Funct. Anal. Optim. 41, 1089–1108 (2020)
Cegielski, A., Reich, S., Zalas, R.: Regular sequences of quasi-nonexpansive operators and their applications. SIAM J. Optim. 28, 1508–1532 (2018)
Cegielski, A., Reich, S., Zalas, R.: Weak, strong and linear convergence of the CQ-method via the regularity of Landweber operators. Optimization 69, 605–636 (2019)
Censor, Y., Zenios, S.A.: Parallel optimization. Algorithms and Applications, Oxford University Press, New York, Theory (1997)
Chen, X., Song, Y., He, J., Gong, L.: Self-adaptive algorithms for the split common fixed point problem of the demimetric mappings. J. Appl. Math. Phys. 7, 2187–2199 (2019)
Chidume, Ch.E., Măruşter, Ş: Iterative methods for the computation of fixed points of demicontractive mappings. J. Comput. Appl. Math. 234, 861–882 (2010)
Combettes, P.L.: Convex set theoretic image recovery by extrapolated iterations of parallel subgradient projections. IEEE Trans. Image Process. 6, 493–506 (1997)
Cui, H.: Multiple-sets split common fixed-point problems for demicontractive mappings. Hindawi J. Math. Article ID 3962348, 6 pages. (2021)
Dao, M.N., Phan, H.M.: Adaptive Douglas-Rachford splitting algorithm for the sum of two operators. SIAM J. Optim. 29, 2697–2724 (2019)
Deutsch, F.: Best approximation in inner product spaces. Springer-Verlag, New York (2001)
Dotson, W.G., Jr.: On the Mann iterative process. Trans. Amer. Math. Soc. 149, 65–73 (1970)
Goebel, K., Reich, S.: Uniform convexity, hyperbolic geometry, and nonexpansive mappings. Marcel Dekker, New York and Basel (1984)
Hanjing, A., Suantai, S.: The split common fixed point problem for infinite families of demicontractive mappings. Fixed Point Theory Appl. 2018, 14 (2018)
Hicks, T.L., Kubicek, J.D.: On the Mann iteration process in a Hilbert space. J. Math. Anal. Appl. 59, 498–504 (1977)
López, G., Martín-Márquez, V., Wang, F., Xu, H.-K.: Solving the split feasibility problem without prior knowledge of matrix norms. Inverse Probl. 28(18pp), 085004 (2012)
Maingé, P.-E.: The viscosity approximation process for quasi-nonexpansive mappings in Hilbert spaces. Comput. Math. Appl. 59, 74–79 (2010)
Maingé, P.-E.: A viscosity method with no spectral radius requirements for the split common fixed point problem. Eur. J. Oper. Res. 235, 17–27 (2014)
Maingé, P.-E., Măruşter, Ş: Convergence in norm of modified Krasnoselski-Mann iterations for fixed points of demicontractive mappings. Appl. Math. Comput. 217, 9864–9874 (2011)
Marino, G., Xu, H.-K.: Weak and strong convergence theorems for strict pseudo-contractions in Hilbert spaces. J. Math. Anal. Appl. 329, 336–346 (2007)
Măruşter, Ş: The solution by iteration of nonlinear equations in Hilbert spaces. Proc. Am. Math. Soc. 63, 69–73 (1977)
Moudafi, A.: The split common fixed-point problem for demicontractive mappings. Inverse Probl. 26, 055007 (2010)
Ogura, N., Yamada, I.: Non-strictly convex minimization over the fixed point set of an asymptotically shrinking nonexpansive mapping. Numer. Funct. Anal. Optimiz. 23, 113–137 (2002)
Opial, Z.: Weak convergence of the sequence of successive approximations for nonexpansive mappings. Bull. Amer. Math. Soc. 73, 591–597 (1967)
Pierra, G.: Decomposition through formalization in a product space. Math. Program. 28, 96–115 (1984)
Reich, S.: Extension problems for accretive sets in Banach spaces. J. Funct. Anal. 26, 378–395 (1977)
Reich, S.: Weak convergence theorems for nonexpansive mappings in Banach spaces. J. Math. Anal. Appl. 67, 274–276 (1979)
Shehu, Y., Cholamjiak, P.: Another look at the split common fixed point problem for demicontractive operators. Revista de la Real Academia de Ciencias Exactas, Físicas y Naturales. Serie A. Matemáticas 110, 201–218 (2016)
Suparatulatorn, R., Cholamjiak, P., Suantai, S.: Self-adaptive algorithms with inertial effects for solving the split problem of the demicontractive operators. RACSAM 114, 40 (2020)
Suparatulatorn, R., Suantai, S., Phudolsitthiphat, N.: Reckoning solution of split common fixed point problems by using inertial self-adaptive algorithms. RACSAM 113, 3101–3114 (2019)
Stark, H., Yang, Y.: Vector space projections. A numerical approach to signal and image processing, neural nets and optics, John Wiley & Sons, Inc, New York (1998)
Tang, Y.-C., Peng, J.-G., Liu, L.-W.: A cyclic algorithm for the split common fixed point problem of demicontractive mappings in Hilbert spaces. Math. Model. Anal. 17, 457–466 (2012)
Wang, F., Cui, H.: Convergence of a cyclic algorithm for the split common fixed point problem without continuity assumption. Math. Model. Anal. 18, 537–542 (2013)
Wang, F., Xu, H.-K.: Cyclic algorithms for split feasibility problems in Hilbert spaces. Nonlinear Anal. 74, 4105–4111 (2011)
Yamada, I., Ogura, N.: Hybrid steepest descent method for variational inequality problem over the fixed point set of certain quasi-nonexpansive mappings. Numer. Funct. Anal. and Optimiz. 25, 619–655 (2004)
Yao, Y., Liou, Y.-C., Postolache, M.: Self-adaptive algorithms for the split problem of the demicontractive operators. Optimization 67, 1309–1319 (2018)
Zhou, H.: Convergence theorems of fixed points for \(\kappa \)-strict pseudo-contractions in Hilbert spaces. Nonlinear Anal. 69, 456–462 (2008)
Acknowledgements
After this paper has been accepted, Heinz Bauschke, Theo Bendit and Walaa M. Moursi made us aware on their recent result [BBM23] regarding the optimality of the Ogura–Yamada bound (24) in the context of the composition of two linear projections (one of which may even be relaxed). We thank the authors for making us aware of their recent work.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
Lemma 4.11
Let \(\lambda ,\mu >0\). If \(\lambda \mu < 4\), then \(\lambda +\mu >\lambda \mu \).
Proof
Let \(\lambda \mu < 4\). If \(\lambda \le 1\), then
which yields \(\lambda +\mu >\lambda \mu \). Let now \(\lambda >1\) and suppose that \(\lambda +\mu \le \lambda \mu \). Then, we obtain
a contradiction.\(\square \)
Lemma 4.12
Let \(\alpha ,\beta \in (-\infty ,1)\).
-
(i)
If \(\alpha +\beta < \alpha \beta \) then \(\alpha +\beta < 0\) and \(\frac{\alpha \beta }{\alpha +\beta }< 1\).
-
(ii)
If \(\frac{\alpha \beta }{\alpha +\beta }< 1\) and at most one of \(\alpha ,\beta \ge 0\) then \(\alpha +\beta < \alpha \beta \).
Proof
-
(i)
Define \(f(x)=1-\frac{2}{x}\) for \(x>0\). Then, (i) follows from Lemma 4.11 by setting \(\alpha =f(\lambda )\) and \(\beta =f(\mu )\).
-
(ii)
Let \(\frac{\alpha \beta }{\alpha +\beta }< 1\). If \(\alpha ,\beta < 0\) then \(\alpha +\beta < 0\), consequently, \(\alpha \beta >\alpha +\beta \). By the symmetry it is enough to consider the case \(\alpha < 0\), \(\beta \ge 0\). If \(\beta =0\) then \(\alpha +\beta =\alpha < 0=\alpha \beta \). If \(\beta >0\) then \(\frac{\alpha +\beta }{\alpha \beta }>1\) which yields \(\alpha +\beta < \alpha \beta \). \(\square \)
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Cegielski, A. Strict pseudocontractions and demicontractions, their properties, and applications. Numer Algor 95, 1611–1642 (2024). https://doi.org/10.1007/s11075-023-01623-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11075-023-01623-9