
Abstract
A class of nonlinear velocity-dependent problems must be solved iteratively for conventional integration methods since there exists no completely explicit integration method among them. A completely explicit structure-dependent integration method is developed in this work, and it can be applied to solve such problems non-iteratively. A completely explicit method for time integration is characterized by the adoption of explicit difference formulas for both the displacement and velocity increment. It can be derived from an eigen-based theory, and this theory can provide a fundamental basis for the feasibility of time integration. The new method generally has no serious disadvantages of weak instability and unusual overshoot in high-frequency steady-state responses that have been found in the current completely explicit structure-dependent integration methods. It is analytically and numerically verified that it can be used to solve nonlinear velocity-dependent problems without nonlinear iterations and can have a comparable accuracy in contrast to the solutions obtained from conventional integration methods with an iteration procedure. Its computational efficiency due to no nonlinear iterations is also affirmed by numerical examples.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In earthquake engineering or structural dynamics, an equation of motion can be derived from the dynamic equilibrium of inertia force, damping force, restoring force and external force, where the damping and/or restoring force might be nonlinearly formulated. In fact, in the nonlinear regime, they can be combined together as a nonlinear function of displacement and/or velocity. A class of nonlinear rate-depending viscoelastic or nonlinear elastic models [1,2,3,4,5] generally possesses this trait. In addition, it can be also applied to denote a geometrically nonlinear system. As an example, many buildings have been equipped with various nonlinear viscous and/or viscoelastic dampers to largely dissipate seismic energy and thus to suppress dynamic responses [1, 2, 4, 5]. Such dampers are often classified as velocity-dependent dampers since the force–displacement response properties are mainly a function of the relative velocity or the frequency of motion [6]. This type of nonlinear problems must be solved iteratively by conventional integration methods [7,8,9,10,11,12,13,14,15,16,17,18,19,20,21], whose coefficients of the both difference formulas are scalar constants. Although the Newmark explicit method [7] and central difference method are generally classified as explicit methods, they still require an iteration procedure for solving such nonlinear velocity-dependent problems. This is because that they only have an explicit displacement difference formula, while the velocity difference formula is implicit. Hence, strictly speaking, they are semi-explicit methods. In contrast, a completely explicit method, whose two difference formulas are explicit, can solve such nonlinear problems without nonlinear iterations. However, there is no completely explicit method in conventional integration methods. For a semi-explicit method, the next step displacement can be explicitly calculated from the explicit displacement difference equation and therefore the corresponding displacement-dependent restoring force can be yielded. However, the next step velocity cannot be explicitly determined due to the use of an implicit velocity difference equation. Hence, an iteration procedure is required to determine the next step velocity and its corresponding nonlinear velocity-dependent damping force. On the other hand, for a completely explicit method, both the next step displacement and velocity can be directly calculated from the explicit displacement and velocity difference equations. As a result, the corresponding restoring force, damping force or the combination of the two forces can be explicitly determined. Hence, a completely explicit method is of great interest.
Structure-dependent integration methods (SDIMs) are different from conventional integration methods in coefficients. They are characterized by structure dependency since their coefficients of the difference formulas can be functions of initial structural properties and step size [22,23,24,25,26,27,28,29,30,31,32,33]. Since many abbreviations are used in this work, they are listed in Table 1 for brevity. Most SDIMs are semi-explicit methods [21,22,23,24,25,26,27,28,29], and only a few are completely explicit methods [30,31,32,33]. It has been validated that SDIMs can solve nonlinear problems with a high computational efficiency [24, 29]. However, these problems must involve no nonlinear velocity-dependent force, and thus, they can be solved by semi-explicit SDIMs without involving nonlinear iterations. Although some fully explicit SDIMs [30,31,32,33] can solve nonlinear velocity-dependent problems without an iteration procedure, they all have the critical defects of weak instability and an overshoot in high-frequency steady-state response in addition to a poor capability to seize structural nonlinearity and a conditional stability for stiffness hardening systems. These properties preclude them from practical applications [34,35,36,37].
A family of completely explicit SDIMs will be developed in this work. A theoretical basis of the development of SDIMs can be manifested from an eigen-based theory, which will be applied to verify the feasibility of each main stage of the development procedure. This procedure consists of three main stages: (1) to decompose a coupled equation of motion into a series of uncoupled modal equations of motion; (2) to develop an eigen-dependent integration method (EDIM) to solve each uncoupled modal equation of motion; and (3) to convert all the developed EDIMs into a SDIM. The first and third stages can be achieved by using an eigen-decomposition technique. The second stage plays a key role to successfully develop a SDIM, and thus, details will be presented and explained. After the development of the proposed family of SDIMs, its numerical properties will be explored for both linear elastic and nonlinear systems. In addition, it will be analytically verified why it can simultaneously combine an explicit implementation and an unconditional stability in the solution of nonlinear systems. Some numerical examples will be adopted to validate the numerical properties of the proposed family of SDIMs and to validate that it can be applied to solve nonlinear velocity-dependent problems without involving any nonlinear iterations. Finally, a series of large nonlinear velocity-dependent systems will be solved to assess the computational efficiency of the completely explicit SDIMs, semi-explicit SDIMs and implicit methods.
The outline of this work is organized as follows: The detailed development of a family of EDIMs is presented in Sect. 2 including the basic assumptions for its general formulation, the determination of the eigen-dependent coefficients, the requirement of a load-dependent term and the insight into the low and high-frequency behaviors. Numerical properties of the proposed family of EDIMs are discussed in Sect. 3, where the stability, accuracy and numerical damping for both linear elastic and nonlinear systems are explored. Besides, a stability amplification factor is also used to enlarge an unconditional stability interval. Section 4 presents the results of the study of the high-frequency overshoot for both transient and steady-state responses. No weak instability is also verified in this section. In Sect. 5, the transformation from an EDIM to a SDIM is presented and its importance is also discussed. The implementation details of the proposed family of SDIMs are shown in Sect. 6, and the comparison of completely explicit SDIMs is presented in Sect. 7. To examine the capability of the proposed family of SDIMs, some numerical examples are studied in Sect. 8. The conclusions and recommendations are given in Sect. 9.
2 Development of eigen-dependent integration method
In structural dynamics, a coupled equation of motion for a n-degree of freedom system can be generally expressed as:
where M, C and K correspond to the mass, viscous damping coefficient and stiffness matrices; f is an external force vector; and u, \( {\dot{\mathbf{u}}} \) and \(\ddot{\mathbf{{u}}}\) are the displacement, velocity and acceleration vectors, respectively. For a linear elastic system, Eq. (1) can be decomposed into a set of uncoupled equations of motion as:
where \( m^{(k)} \), \( c^{(k)} \) and \( k^{(k)} \) are the generalized mass, viscous damping coefficient and stiffness of the k-th mode, respectively. Besides, \( f^{(k)} \) is the generalized external force of the k-th mode. In this equation, the superscript (k) is used to represent the k-th mode. For brevity, the superscript will be omitted in the subsequent study. Thus, Eq. (2) becomes:
An EDIM will be developed to solve modal equation of motion as shown in Eq. (3), where a total of n uncoupled modal equations of motion is implied.
2.1 Basic assumptions
In addition to a modal equation of motion, two difference formulas are required to formulate an EDIM. Since the purpose of this study is to develop a completely explicit family of SDIMs, the two difference formulas should involve no current step data so that it can have a completely explicit formulation. As a result, the proposed family of SDIMs is assumed to be in the form of:
where di, vi, ai and fi are the nodal displacement, velocity, acceleration and external force, respectively; \( p_{i + 1} \) is known as a load-dependent term, which can eliminate an adverse overshoot in high-frequency steady-state responses. The parameters of \( \beta_{1} \) to \( \beta_{3} \) are adopted to represent the coefficients of the two difference formulas; and they are no longer limited to be scalar constants but can be eigen dependent. In addition, m, c and k can be considered as the generalized mass, generalized viscous damping coefficient and generalized stiffness, respectively, for a specific modal equation of motion.
An important goal of the development of an EDIM for solving each modal equation of motion is that the modal equations of motion of low-frequency modes must be accurately solved, while for those of high-frequency modes, no unstable results must be guaranteed. In general, each coefficient of \( \beta_{1} \), \( \beta_{2} \) and \( \beta_{3} \) can be expressed as a rational function of \( \varOmega_{0} \), where both the numerator and denominator can be assumed to be polynomial functions of \( \varOmega_{0} \). Notice that \( \varOmega_{0} = \omega_{0} (\Delta t) \) and \( \omega_{0} = \sqrt {k_{0} /m} \), where k0 is an initial generalized stiffness. A scalar constant must be included in the numerator and denominator so that an eigen-dependent coefficient can degenerate into a scalar constant in the limit \( \varOmega_{0} \to 0 \) (or for low-frequency modes) and \( \varOmega_{0} \to \infty \) (or for high-frequency modes). On the other hand, the maximum order of \( \varOmega_{0} \) in numerator must be no more than that of the denominator. This is mainly because that an instability will experience in the limit \( \varOmega_{0} \to \infty \) (or for high-frequency modes) if the maximum power of \( \varOmega_{0} \) in the numerator is larger than that of the denominator. This assumption is a key step to guarantee that there will be no abnormal amplitude growth or numerical explosions. Thus, an eigen-dependent coefficient will become a scalar constant in the two limiting cases. Apparently, a low-frequency mode can be accurately integrated and no instability occurs in high-frequency modes if the scalar constants of eigen-dependent coefficients are appropriately determined.
Based on these assumptions, one can simply assume that a scalar constant in numerator matches with a linear polynomial function of \( \varOmega_{0} \) in denominator; a linear polynomial function of \( \varOmega_{0} \) in numerator matches with a quadratic polynomial function of \( \varOmega_{0} \) in denominator; and others. In order to involve the unknown parameters as less as possible for simplicity, \( B = 1 + 2\gamma \xi \varOmega_{0} \) can be selected as a linear polynomial function of \( \varOmega_{0} \), while \( D = 1 + 2\gamma \xi \varOmega_{0} + \beta \varOmega_{0}^{2} \) can be chosen as a quadratic polynomial function of \( \varOmega_{0} \), where \( \beta \) and \( \gamma \) are the parameters to control numerical properties. As a result, the denominator of \( \beta_{1} \) to \( \beta_{3} \) can be assumed in the formulation of B, D or BD. The coefficients of \( \beta_{1} \) to \( \beta_{3} \) are eigen dependent and are functions of the eigenvalue (i.e., modal frequency) and step size, i.e., \( \varOmega_{0} \). After a series of the pilot study, the coefficients of \( \beta_{1} \), \( \beta_{2} \) and \( \beta_{3} \) can be taken as:
where gi for \( i = 1,2,3 \) and hi for \( i = 1,2 \) are scalar constants. It will be shown later that Eq. (5) can be used to develop a completely explicit family of SDIMs with favorable numerical properties. Other eigen-dependent forms of \( \beta_{1} \) to \( \beta_{3} \) may be also adopted to develop SDIMs. It can be found that the coefficient \( \beta_{i} \) will become a scalar constant of gi in the limit \( \varOmega_{0} \to 0 \), while it will tend to zero in the limiting case of \( \varOmega_{0} \to \infty \). Notice that a combination of B and D to formulate the denominator of \( \beta_{2} \) and the adoption of B to formulate the denominator of \( \beta_{3} \) are new trails in this study and have never been seen in the literature.
2.2 Determination of eigen-dependent coefficient
A numerical method must be convergent; and consistency in conjunction with stability implies convergence based on the Lax equivalence theory [38]. Hence, the satisfaction of convergence can be applied to determine the scalar constants gi and hi. Consistency of an integration method can be proved by examining its order of accuracy, which can be determined from the local truncation error. As a result, the local truncation error of the proposed family of EDIMs must be first found so that the scalar constant coefficients can be appropriately determined. Before the derivation of the local truncation error for the proposed family of SDIMs, it is required to derive an approximating displacement difference equation from Eq. (4) after eliminating velocities and accelerations. As a result, it is found to be:
where
The use of the approximating displacement difference equation to derive a local truncation error can be found in Ref. [39]. As a result, the local truncation error for the proposed family of EDIMs is found to be:
This equation can be applied to determine the eigen-dependent coefficients of \( \beta_{1} \) to \( \beta_{3} \) as well as the load-dependent term \( p_{i + 1} \). To simplify the determination process, a zero loading is considered first. After determining the coefficients of \( \beta_{1} \) to \( \beta_{3} \), they can be substituted in Eq. (8) and then, it can be applied to determine the load-dependent term \( p_{i + 1} \).
Both the desired order of accuracy and no overshoot in high-frequency steady-state responses must be met for determining the eigen-dependent coefficients. Notice that any term of the power of \( \varOmega_{0} \) or \( \omega_{0} \) equal to or greater than 2 in the local truncation error will result in an unusual high-frequency overshoot in steady-state responses [40], and thus, it must disappear. Based on Eq. (8), a first-order accuracy can be obtained if the first two terms are removed, whereas a second-order accuracy can be achieved if the first five terms on the right side are eliminated. After setting zero coefficients for the first two terms, one can have:
As a result, \( g_{1} = g_{3} = 1 \) is found. Although the third to fifth terms can have a first-order accuracy, they are quadratic terms of \( \omega_{0} \), and thus, they must clear away. For this purpose, one can set a zero coefficient for the third term and assume that the fourth and fifth terms have the same coefficient. The former leads to \( h_{1} = \gamma \). Hence, after substituting \( g_{1} = g_{3} = 1 \) and \( h_{1} = \gamma \) in the coefficients of the fourth and fifth terms, they become \( \gamma - \tfrac{1}{2} \) and \( g_{2} - 1 \), respectively. The latter assumption will result in \( \gamma - \tfrac{1}{2} = g_{2} - 1 \), which gives \( g_{2} = \gamma + \tfrac{1}{2} \). Since the fourth and fifth terms have the same coefficient of \( \gamma - \tfrac{1}{2} \), they can be alternatively expressed as:
This equation is derived from the first derivative of equation of motion. Clearly, the fourth and fifth terms will disappear if \( \gamma = \tfrac{1}{2} \) is taken or alternatively expressed if \( \gamma \ne \tfrac{1}{2} \). Clearly, this alternative expression is independent of \( \omega_{0} \) as shown on the right side of Eq. (10).
It is seen that the sixth to eighth terms are second order accurate. However, they are quadratic terms of \( \varOmega_{0} \), and the seventh term is not only a quadratic term of \( \varOmega_{0} \) but also a cubic term of \( \omega_{0} \). Hence, they must be eliminated or alternatively expressed. If the sixth and seventh terms have the same coefficient of Cc, they can be alternatively written as:
This equation is similar to Eq. (10) except for different coefficients between \( \gamma - \tfrac{1}{2} \) and \( C_{c} 2\xi \varOmega_{0} \). It is found that the left-side terms are quadratic terms of \( \varOmega_{0} \), while the right-side terms are linear terms of \( \varOmega_{0} \). Hence, this transformation can eliminate the terms to cause an adverse overshoot in high-frequency steady-state responses. As a result, \( C_{c} = \gamma \left( {\gamma - \tfrac{1}{2}} \right) \) and \( h_{2} = - \beta + \gamma \left( {\gamma + \tfrac{1}{2}} \right) \) can be found. Consequently, the coefficients of \( \beta_{1} \) to \( \beta_{3} \) can be explicitly written as:
Apparently, the eighth term in Eq. (8) must also disappear since it is a quadratic of \( \varOmega_{0} \).
After determining the eigen-dependent coefficients of \( \beta_{1} \) to \( \beta_{3} \), the local truncation error of Eq. (8) can be largely simplified after the substitution of Eq. (12) in it and is found to be:
This family of EDIMs generally has a first-order accuracy, while it can have a second-order accuracy if \( \gamma = \tfrac{1}{2} \) is adopted. The first term will vanish for \( \gamma = \tfrac{1}{2} \). Hence, the term \( \beta \varOmega_{0}^{2} \ddot{u}_{i} /D \) will become a dominant error term for a large \( \varOmega_{0} \) since it is the only quadratic term of \( \varOmega_{0} \) as \( \gamma = \tfrac{1}{2} \). It will result in an adverse overshoot in high-frequency steady-state responses. This adverse term can be eliminated if the load-dependent term \( p_{i + 1} \) is introduced to meet the following equation:
This equation is derived from the second time derivative of the equation of motion. Although the left-side terms include a quadratic term of \( \varOmega_{0} \), there exists no quadratic term of \( \varOmega_{0} \) on the right-side terms. Hence, this transformation can be applied to remove the adverse term \( \beta \varOmega_{0}^{2} \ddot{u}_{i} /D \). Hence, it is validated that a loading-dependent term is generally required for a SDIM.
It is manifested from Eq. (14) that \( p_{i + 1} \) is required to produce the term of \( - \beta \tfrac{1}{m}\left( {\Delta t} \right)^{2} \ddot{f}_{i} /D \) in the local truncation error so that Eq. (14) can be satisfied. As a result, it is chosen to be:
Apparently, \( p_{i + 1} \) is a function of the dynamic loading and thus it is a load-dependent term. After substituting Eqs. (10) in (9), the local truncation error becomes:
This equation discloses that the dominant error term \( \beta \varOmega_{0}^{2} \ddot{u}_{i} /D \) is removed, and thus, there will be no unusual overshoot in high-frequency steady-state responses. It is necessitated to adopt \( \gamma = \tfrac{1}{2} \) for the proposed family of EDIMs so that a second-order accuracy can be achieved. For brevity, this family of integration methods is referred as a family of completely explicit methods (CEM) herein.
2.3 Confirmation of load-dependent term
An example is used to confirm the importance of the addition of the load-dependent term \( p_{i + 1} \) into the displacement difference equation for CEM. For this purpose, an undamped forced vibration response is calculated for the equation of motion:
where \( \bar{\omega } \) is a driving frequency. For zero initial conditions, an exact solution is found to be:
where \( z = \bar{\omega }/\omega_{0} \) is a ratio of vibration frequency. The first and second terms on the right side of this equation denote a steady-state response and a transient response, respectively. For a large \( \omega_{0} \) (or a high-frequency mode), the ratio z will tend to zero. This implies that Eq. (18) will reduce to \( u (t )\approx u\sin (\bar{\omega }t) \) for a small z value. In this case, the total response is almost dominated by the steady-state response and there is almost no contribution from the transient response. Thus, a forced vibration response to a system with high-frequency modes can be used to reveal whether CEM has an overshoot in high-frequency steady-state responses.
A natural frequency as large as \( \omega_{0} = 10^{5} \;{\text{rad/s}} \) is considered. Besides, a driving frequency of \( \bar{\omega } = 1\;{\text{rad/s}} \) is also taken, and thus, \( z = 10^{ - 5} \) is found. Clearly, the total solution is dominated by the steady-state response. Hence, a reliable solution can be achieved if the steady-state response is accurately integrated. For this purpose, \( \Delta t = 0.5\;{\text{s}} \) is adopted. This is because that a harmonic load can be faithfully represented if \( \Delta t/\bar{T} \) is less than \( \tfrac{1}{12} \), where \( \bar{T} \) is the period of the harmonic load [41]. This implies that \( \Delta t = 0.5\;{\text{s}} \) can accurately integrate the steady-state response since the value of \( \Delta t/\bar{T} \) is as small as \( 1/(4\pi ) \), where \( \bar{T} = 2\pi \). At first, CEM without \( p_{i + 1} \) is used to compute the forced vibration responses. Subsequently, CEM with \( p_{i + 1} \) is also used to calculate the solutions. Two members of CEM are considered. One is the member of \( \beta = \tfrac{1}{4} \) and \( \gamma = \tfrac{1}{2} \); and the other is \( \beta = \gamma = \tfrac{1}{2} \). All the numerical results are plotted in Fig. 1. It is seen in Fig. 1a, c that both members of CEM show a very significant overshoot in the steady-state response without a load-dependent term \( p_{i + 1} \), while the calculated results coincide with the exact solution for both members of CEM with \( p_{i + 1} \) as shown in Fig. 1b, d. The necessity of including the load-dependent term in the displacement difference formula is evident.

High-frequency steady-state response to sine load for CEM
It is worth noting that the current completely explicit SDIMs, such as CRM (by Chen and Ricles) [31], TLM (by Tang and Liu) [32] and KRM (by Kolay and Ricles) [33], exclude a load-dependent term in their formulations. Hence, they will experience an unusual overshoot in high-frequency steady-state responses. Numerical verifications of such an overshoot for these completely explicit SDIMs have been shown in References [34,35,36,37] and thus will not be elaborated again herein.
2.4 Insight into low and high-frequency behaviors
Since an important goal of an EDIM is required to accurately integrate low-frequency modes, while no numerical explosions are guaranteed for high-frequency modes so that it can combine an unconditional stability and an explicit implementation, it is important to gain an insight into the performance of CEM for solving a modal equation of motion in the limit \( \varOmega_{0} \to 0 \) and \( \varOmega_{0} \to \infty \). The case of \( \varOmega_{0} \to 0 \) is examined first. The approximating displacement difference equation for CEM as shown in Eq. (6) will reduce to be:
in the limit \( \varOmega_{0} \to 0 \). This degenerate approximating displacement difference equation of CEM is found to be the same as that of the Newmark family method [7]. This implies that the performance of CEM will be almost the same as that of the Newmark family method in the limit \( \varOmega_{0} \to 0 \). Since the Newmark family method can generally provide a very accurate solution in the limit \( \varOmega_{0} \to 0 \), thus CEM can integrate low-frequency modes as accurately as the Newmark family method.
On the other hand, in the limit \( \varOmega_{0} \to \infty \), it is very straightforward to find that the asymptotic values of \( \beta_{1} \), \( \beta_{2} \), \( \beta_{3} \) and \( p_{i + 1} \) are all equal to zero, and thus, the formulation of CEM becomes:
The characteristic equation corresponding to this degenerate formulation of CEM can be easily found and is \( \lambda \left( {\lambda - 1} \right)^{2} = 0 \). Clearly, the eigenvalues are found to be \( \lambda_{1} = \lambda_{2} = 1 \) and \( \lambda_{3} = 0 \). As a result, it is verified that an unconditional stability can be achieved in the limit \( \varOmega_{0}^{ (k )} \to \infty \) or a high-frequency mode for any combination of \( \beta \) and \( \gamma \) for CEM since the three eigenvalues are less than or equal to 1.
After exploring the limiting cases of \( \varOmega_{0} \to 0 \) and \( \varOmega_{0} \to \infty \), it is confirmed that CEM can accurately integrate low-frequency modes, while there is no instability for high-frequency modes. As a result, these characteristics can perfectly satisfy the important goal for developing a desired EDIM and thus CEM is successfully developed for solving each modal equation of motion.
3 Nonlinear numerical properties
An integration method not only aims for conducting linear but also nonlinear dynamic analysis, and then, its performance for solving nonlinear systems must be thoroughly explored. The variation of stiffness for a nonlinear system must be faithfully reflected so that the numerical properties of the integration method can be assessed. The ratio of the stiffness at the end of the i-th time step over the initial stiffness can be applied to monitor the stiffness change within the time step. As a result, it can be expressed as:
Based on this definition, \( 0 < \delta_{i} < 1 \), \( \delta_{i} = 1 \) and \( \delta_{i} > 1 \) imply that an instantaneous stiffness at the end of the i-th time step is less than, equal to and greater than the initial stiffness, respectively. In addition, these three cases are also corresponding to stiffness softening, linear elastic and stiffness hardening. Since \( \delta_{i} \) can be applied to represent a structural nonlinearity at the time of \( t = t_{i} \), it is named as an instantaneous degree of nonlinearity at the end of the i-th time step [23,24,25, 27,28,29].
Although \( \delta_{i} \) is defined based on a single degree of freedom system, it can be extended to a multiple degree of freedom system by using an eigen-decomposition technique. In fact, a n-degree of freedom system at the end of i-th time step can be decomposed into n uncoupled single degree of freedom systems as:
where \( m^{(k)} \), \( c_{i}^{(k)} \), \( k_{i}^{(k)} \) and \( f_{i}^{(k)} \) are the mass, viscous damping coefficient, stiffness and dynamic load for the k-th mode at the end of the i-th time step, respectively. The system is assumed to have a classical damping matrix so that the coupled equation of motion can be decomposed into a series of uncoupled modal equations of motion. Based on Eq. (22), one can have:
where \( \omega_{0}^{(k)} \) and \( \omega_{i}^{(k)} \) are the natural frequencies of the k-th mode based on the initial generalized stiffness and the generalized stiffness at the end of the i-th time step; and \( \delta_{i}^{(k)} \) is the instantaneous degree of nonlinearity at the end of the i-th time step for the k-th mode.
3.1 Nonlinear stability property
An integration procedure can be expressed as a recursive matrix form, and thus, the numerical properties of the integration method can be evaluated. This matrix form can be constructed from the computing sequence of the (i + 1)-th time step. At the end of the i-th time step, the data of di, vi and ai are available at the beginning of the (i + 1)-th time step. At first, the displacement \( d_{i + 1} \) can be calculated from the second line of Eq. (4). The restoring force \( r_{i + 1} \) in correspondence to the displacement \( d_{i + 1} \) can be determined from an assumed force–displacement relationship and can be written as \( r_{i + 1} = k_{i + 1} d_{i + 1} \), where \( k_{i + 1} \) is the stiffness at the end of the (i + 1)-th time step. Next, the velocity \( v_{i + 1} \) can be computed from the third line of Eq. (4). Finally, the acceleration \( a_{i + 1} \) can be determined from the equation of motion, i.e., the first line of Eq. (4). As a result, a recursive matrix form for a free vibration response for CEM can be written as:
where \( {\mathbf{X}}_{i + 1} = \left[ {d_{i + 1} ,(\Delta t)v_{i + 1} ,(\Delta t)^{2} a_{i + 1} } \right]^{\text{T}} \); \( {\mathbf{A}}_{i + 1} \) is an amplification matrix at the (i + 1)-th time step. An explicit expression of \( {\mathbf{A}}_{i + 1} \) is found to be:
Clearly, the amplification matrix \( {\mathbf{A}}_{i + 1} \) may vary for a different time step since \( \varOmega_{i + 1}^{2} \) is determined from the stiffness \( k_{i + 1} \) at the end of (i + 1)-th time step and \( k_{i + 1} \) will generally vary for a nonlinear system.
In general, the characteristic equation for \( {\mathbf{A}}_{i + 1} \) can be calculated from \( \left| {{\mathbf{A}}_{i + 1} - \lambda {\mathbf{I}}} \right| = 0 \) and is found to be:
where \( \lambda \) is an eigenvalue and the coefficients of A1 to A3 for general nonlinear systems are found to be:
This characteristic equation can be used to assess the numerical properties of CEM for the (i + 1)-th time step but not for a complete integration procedure. However, the results are still indicative since a complete integration procedure consists of each time step.
A stable computation can be achieved if \( \rho ({\mathbf{A}}_{i + 1} ) \le 1 \) is met [39], which will result in either a bounded oscillatory response or an exponential decay response. In general, \( \rho ({\mathbf{A}}_{i + 1} ) \) is defined as the spectral radius of the amplification matrix \( {\mathbf{A}}_{i + 1} \) at the end of the (i + 1)-th time step and it can be written as \( \rho ({\mathbf{A}}_{i + 1} ) = \hbox{max} \left| {\lambda_{j} } \right| \) where \( j = 1,2,3 \). In Eq. (27), a zero eigenvalue is implied by \( A_{3} = 0 \). Hence, the requirement of \( \rho ({\mathbf{A}}_{i + 1} ) \le 1 \) leads to the stability conditions:
It is complicated to mathematically derive the stability conditions of CEM for nonlinear systems for \( \xi \ne 0 \). Hence, only the stability conditions are analytically derived for \( \xi = 0 \), whereas for \( \xi \ne 0 \) they will be numerically computed. The stability conditions for zero viscous damping are:
where \( \varOmega_{0}^{\left( u \right)} \) is referred as an upper stability limit. The conditions of \( \beta \ge \gamma^{2} \) and \( \gamma \ge \tfrac{1}{2} \) must be met, which will lead to \( 2\beta /\gamma \) generally larger than or equal to 1.
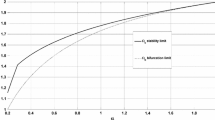
The variations of \( \varOmega_{0}^{\left( u \right)} \) versus \( \delta_{i + 1} \) for different \( \xi \) values, including the case of \( \xi = 0 \), for different members of CEM are plotted in Fig. 2. It is seen that the unconditional stability intervals for \( \beta = \tfrac{1}{4} \), \( \tfrac{1}{2} \) and \( \tfrac{3}{4} \) with \( \gamma = \tfrac{1}{2} \) are corresponding to \( 0 < \delta_{i + 1} \le 1 \), \( 0 < \delta_{i + 1} \le 2 \) and \( 0 < \delta_{i + 1} \le 3 \) for \( \xi = 0 \). This phenomenon is consistent with the analytical prediction by the first line of Eq. (29), i.e., \( 0 < \delta_{i + 1} \le 2\beta /\gamma \), where a large \( \beta \) implies a large unconditional stability interval as \( \gamma = \tfrac{1}{2} \). Very different results are found for the case of \( \xi \ne 0 \). In fact, the results for the three members of \( \beta = \tfrac{1}{4} \), \( \tfrac{1}{2} \) and \( \tfrac{3}{4} \) with \( \gamma = \tfrac{1}{2} \) for \( \xi = 0.15 \) and 0.3 only have an unconditional stability interval of \( 0 < \delta_{i + 1} \le 1 \). Hence, it can be concluded that CEM with \( \gamma = \tfrac{1}{2} \) generally has an unconditional stability of \( 0 < \delta_{i + 1} \le 1 \) except for zero viscous damping. An unconditional stability interval of \( 0 < \delta_{i + 1} \le 2 \) is generally of practical significance. This is because it is very rare for a real structure that its instantaneous stiffness is greater than twice of the initial stiffness, i.e., \( \delta_{i + 1} > 2 \).

Variation of upper stability limit with \( \delta_{i + 1} \) for CEM with \( \sigma = 1 \)
3.2 Enlargement of unconditional stability interval
Stability analysis reveals that CEM is only unconditionally stable in the interval of \( 0 < \delta_{i + 1} \le 1 \), while it will become conditionally stable as \( \delta_{i + 1} > 1 \) for the subfamily of \( \beta \ge \tfrac{1}{4} \) with \( \gamma = \tfrac{1}{2} \) for nonzero viscous damping. As a result, the applications of CEM for time integration might be very inconvenient or severely limited since it may not be known as a priori regarding the variation of the stiffness for the system under analysis. One can apply a stability amplification factor \( \sigma \) to enlarge an unconditional stability interval for SDIMs [42]. This technique is adopted for CEM to improve its unconditional stability interval. The concept of a stability amplification factor originates from a virtual enlargement of \( k_{0} \). This is because an unconditional stability interval can be enlarged if the initial stiffness is changed from \( k_{0} \) to \( \sigma k_{0} \). After this change, an unconditional stability interval is modified from \( 0 < \delta_{i + 1} \le 1 \) to \( 0 < \delta_{i + 1} \le \sigma \) since CEM can have an unconditional stability interval of \( 0 < \delta_{i + 1} \le 1 \) for nonzero viscous damping for \( \beta \ge \tfrac{1}{4} \) and \( \gamma = \tfrac{1}{2} \). Hence, an unconditional stability interval can be arbitrarily enlarged if \( \sigma \) is chosen to be greater than 1. This technique is simple since only the slight modifications of the eigen-dependent coefficients are needed. In fact, only the displacement difference formula needs to be modified for CEM, where the denominator of \( \beta_{1} \), \( \beta_{2} \) and \( \beta_{3} \) as well as \( p_{i + 1} \) are adjusted to be:
where the derivation of \( p_{i + 1} \) is the same as the procedure used for deriving Eq. (15). The case of \( \sigma = 1 \) implies that the technique is not applied to CEM. Clearly, this change will alter the stability properties of CEM, and thus, the stability properties of the modified formulation of CEM must be further explored so that an appropriate value of \( \sigma \) can be determined.
After obtaining the characteristic equation of the modified formulation of CEM, the stability conditions for this modified CEM for \( \xi = 0 \) can be similarly derived and are found to be:
where \( \beta \ge \gamma^{2} \) and \( \gamma \ge \tfrac{1}{2} \) must be also met. This equation discloses that an unconditional stability interval can be effectively enlarged by \( \sigma \) if \( \beta \) and \( \gamma \) are appropriately chosen to meet \( \beta \ge \gamma^{2} \) and \( \gamma \ge \tfrac{1}{2} \). Notice that the choice of \( \gamma = \tfrac{1}{2} \) is generally required to have a second-order accuracy; and thus, \( \beta \ge \tfrac{1}{4} \) must be chosen so that an unconditional stability interval of \( 0 < \delta_{i + 1} \le \sigma \) can be obtained.
Similar to the plot of Fig. 2, the variations of \( \varOmega_{0}^{\left( u \right)} \) versus \( \delta_{i + 1} \) for different \( \xi \) values and for different members of CEM with \( \sigma = 2 \) are shown in Fig. 3. Notice that Fig. 2 shows the results for CEM with \( \sigma = 1 \), while those for CEM with \( \sigma = 2 \) are plotted in Fig. 3. Comparing Figs. 3 to 2, it is found that \( \sigma = 2 \) alters an unconditional stability interval from \( 0 < \delta_{i + 1} \le 4\beta \) to \( 0 < \delta_{i + 1} \le 8\beta \) for \( \xi = 0 \), while for \( \xi \ne 0 \) an unconditional stability interval will be changed from \( 0 < \delta_{i + 1} \le 1 \) to \( 0 < \delta_{i + 1} \le 2 \) as \( \beta \ge \tfrac{1}{4} \). Hence, a choice of \( \beta > \tfrac{1}{4} \) with \( \sigma = 2 \), such as a member of \( \beta = \tfrac{1}{2} \) or \( \tfrac{3}{4} \) with \( \sigma = 2 \), is still unable to have an unconditional stability interval larger than \( 0 < \delta_{i + 1} \le 2 \) for \( \xi \ne 0 \). This indicates that there is no need to select a member of \( \beta > \tfrac{1}{4} \) with \( \gamma = \tfrac{1}{2} \) since a large \( \beta \) value will lead to a large period distortion, which will be shown later. As a result, the member of \( \beta = \tfrac{1}{4} \) and \( \gamma = \tfrac{1}{2} \) of CEM with \( \sigma = 2 \) might be the best member of CEM based on stability consideration since it can have an unconditional stability interval of \( 0 < \delta_{i + 1} \le 2 \) for both \( \xi = 0 \) and \( \xi \ne 0 \). In addition to the change of stability property, the properties of period distortion and numerical dissipation will be also altered after introducing a stability amplification factor into the displacement difference formula. Consequently, these properties must be also further evaluated.

Variation of upper stability limit with \( \delta_{i + 1} \) for CEM with \( \sigma = 2 \)
3.3 Zero numerical damping and period distortion
The numerical accuracy and dissipation of an integration method can be assessed by a relative period error and a numerical damping ratio, respectively. A relative period error and a numerical damping ratio can be assessed by using the following procedure for a nonlinear system. A bounded oscillatory response can be achieved if the two principal roots are complex conjugates. These two roots at the end of the (i + 1)-th time step can be written in an exponential form as:
where \( j = \sqrt { - 1} ,\;\bar{\varOmega }_{i + 1} = \bar{\omega }_{i + 1} (\Delta t) \) and \( \bar{\varOmega }_{i + 1}^{D} = \bar{\varOmega }_{i + 1} \sqrt {1 - \xi^{2} } \). Consequently, the phase shift \( \bar{\varOmega }_{i + 1}^{D} \) and the numerical damping ratio \( \bar{\xi }_{i + 1} \) can be determined by:
where \( \bar{\xi }_{i + 1} \) is a measure of numerical damping. After obtaining \( \bar{\varOmega }_{i + 1}^{D} \), a relative period error can be calculated by:
where \( \bar{T}_{i + 1} \) and \( T_{i + 1} \) represent the computed and true periods of the system. The terms of \( \bar{\xi }_{i + 1} \) and \( \bar{\omega }_{i + 1} \) are treated as the quantities corresponding to \( \xi_{i + 1} \) and \( \omega_{i + 1} \) in a numerical solution.
The second line of Eq. (27) reveals that A2 = 1 for the case of \( \gamma = \tfrac{1}{2} \) and \( \xi = 0 \). As a result, it can be deduced from Eq. (33) that \( \bar{\xi }_{i + 1} = 0 \) for CEM. This indicates that CEM, in general, has no numerical damping. Meanwhile, the variations of the relative period errors versus \( \Delta t/T_{0} \) for the members of \( \beta = \tfrac{1}{4} \) and \( \gamma = \tfrac{1}{2} \) with \( \sigma = 1 \), 2 and 3 of CEM are plotted in Fig. 4 for different \( \sigma \) and \( \delta_{i + 1} \). It is seen in this figure that period distortion increases with increasing \( \Delta t/T_{0} \) for each curve. The relative period error increases with the increase in \( \sigma \) for a given value of \( \Delta t/T_{0} \). This implies that a large \( \sigma \) accompanies a large period distortion. This accuracy study in conjunction with the stability analysis can conclude that a large \( \sigma \) will lead to a large unconditional stability interval but accompanies large period distortion.

Variation of relative period error with \( \Delta t/T_{0} \) for CEM with different \( \sigma \) and \( \delta_{i + 1} \)
For brevity, the members of \( \beta = \tfrac{1}{4} \) and \( \gamma = \tfrac{1}{2} \) with \( \sigma = 1 \), 2 and 3 will be referred as CEM1 to CEM3, respectively. Apparently, CEM1 can have the least period distortion, but it only possesses an unconditional stability interval of \( 0 < \delta_{i + 1} \le 1 \). Hence, it is useful for solving linear elastic and stiffness softening systems. On the other hand, CEM3 can have an unconditional stability interval of \( 0 < \delta_{i + 1} \le 3 \), but it will cause too much period distortion. As a result, it seems that CEM2 might be appropriate for practical applications since it generally has an unconditional stability interval of \( 0 < \delta_{i + 1} \le 2 \) with an acceptable period distortion.
4 No unusual overshoot and weak instability
An overshoot is an adverse property for time integration since it might result in an inaccurate solution. An overshoot in early high-frequency transient responses, which were calculated from the Wilson \( - \theta \) method [43], has been discovered by Goudreau and Taylor in 1972 [44] although it is an unconditionally stable method. This might occur in conventional integration methods due to a stable amplification matrix with an arbitrarily large norm [45]. On the other hand, an overshoot in high-frequency steady-state responses has been found in a general SDIM due to the lack of a load-dependent term in the eigen-dependent difference formula [40]. Consequently, these two types of overshoot must be thoroughly examined for CEM.
4.1 Overshoot in transient response
A simple technique has been proposed by Hilber and Hughes [45] to detect an overshoot in early transient responses of high-frequency modes. In fact, the overshoot potential of an integration method can be revealed by examining the discrete displacement and velocity calculated from the previous step data. In general, the behavior as \( \varOmega_{0} \to \infty \) can provide an indication of the high-frequency response behavior of an integration method. Using Eq. (24), the following equations can be obtained for the limiting case of \( \varOmega_{0} \to \infty \).
There is no overshoot in displacement for any member of CEM since \( d_{i + 1} \) is independent of \( \varOmega_{0} \). In contrast, an overshoot in velocity will be experienced. This is because that \( v_{i + 1} \) is linearly proportional to \( \varOmega_{0} \).
The free vibration response to the initial conditions of d0 = 1 and v0 = 0 for a linear elastic, single degree of freedom system can be applied to confirm the overshooting behavior of CEM1 and CEM2. A time step of \( \Delta t = 10T_{0} \) is adopted for each time history analysis. The results are shown in Fig. 5. The result obtained from the constant average acceleration method (AAM) is also plotted for comparison. The velocity term is normalized by the natural frequency of the system so that it can have the same unit as displacement. A significant amplitude growth is found in Fig. 5a, b for CEM1. Thus, CEM1 has an overshoot both in displacement and in velocity. These results are inconsistent with the analytical results, which indicate no overshoot in displacement as shown in Eq. (35). On the other hand, although a significant amplitude growth is also found in Fig. 5d for CEM2, there is no amplitude growth in displacement in Fig. 5c. These results are in agreements with the analytical results. Apparently, the analytical results of the overshooting study are unable to reveal the bifurcation phenomena found in Fig. 5a, c corresponding to CEM1 and CEM2. Hence, a further investigation of this inconsistence is needed and will be explored later. It will be proved next that the unusual amplitude growth for CEM1 is caused by a weak instability.

Comparison of overshoot response in displacement and velocity for CEM1 and CEM2
4.2 Overshoot in steady-state response
The example given in Eq. (17) is also applied to substantiate that an introduction of a stability amplification factor into the loading term in the displacement difference equation as shown in the second line of Eq. (4) is needed. Hence, an overshoot in high-frequency steady-state responses can be removed. CEM2 and CEM3 are applied to solve the problem by using \( \Delta t = 0.5\;{\text{s}} \). The calculated results are plotted in Fig. 6. Since the results almost coincide with the exact solution, it is evident that the modification of the loading term by a stability amplification factor \( \sigma \) is appropriate.

High-frequency steady-state response to sine load for CEM with different \( \sigma \) values
4.3 Weak instability
A serious disadvantage of weak instability has been found for some SDIMs, such as CRM, TLM and KRM. Both analytical and numerical methods have been adopted to explore the weak instability of these SDIMs [34,35,36,37]. A weak instability might result in an inaccurate solution or even an instability although an appropriate time step is adopted. Hence, it is important to explore whether CEM has such a weak instability. A technique can detect the weak instability of an integration method by calculating a free vibration solution of a linear elastic, single degree of freedom system, where the solution is mathematically derived but not numerically calculated from a computer.
The free vibration response of an undamped, linear elastic, single degree of freedom system is solved by CEM. Equation (3) is adopted for this example except that zero viscous damping and zero dynamic loading are assumed. The initial displacement of \( d_{0} \) and initial velocity of \( v_{0} \) are taken. The free vibration response can be theoretically obtained and is found to be:
where \( d_{n} = u\left( {t_{n} } \right) \) and \( t_{n} = n\left( {\Delta t} \right) \). On the other hand, the numerical solution calculated from CEM can be mathematically derived from Eq. (24) by taking \( {\mathbf{A}}_{i + 1} = {\mathbf{A}} \), which implies a linear elastic system, and thus, it becomes:
where \( {\mathbf{X}}_{0} = \left[ {\begin{array}{*{20}c} {d_{0} ,} & {\left( {\Delta t} \right)v_{0} ,} & {\left( {\Delta t} \right)^{2} a_{0} } \\ \end{array} } \right]^{\text{T}} \) is defined. The initial acceleration \( a_{0} \) can be determined from the equation of motion for given values of \( d_{0} \) and \( v_{0} \). As a result, \( (\Delta t)^{2} a_{0} = - \varOmega_{0}^{2} d_{0} \) is found for zero viscous damping.
To mathematically derive the numerical solution calculated from CEM, it is required to yield the eigenvalues and eigenvectors for the amplification matrix A. For simplicity, the subfamily of \( \gamma = \tfrac{1}{2} \) in addition to a zero viscous damping ratio is considered. The three eigenvalues of A can be found from \( \left| {{\mathbf{A}} - \lambda {\mathbf{I}}} \right| = 0 \) and are found to be:
The eigenvector matrix corresponding to these three eigenvalues for the matrix A is found to be:
Apparently, CEM generally has three linearly independent eigenvectors, and thus, the amplification matrix A is diagonalizable [46], and thus, the expression of \( {\mathbf{A}} = {\mathbf{\varPhi \varLambda }}^{n} {\varvec{\Phi}}^{ - 1} \) can be achieved, where \( {\varvec{\Lambda}} \) is a diagonal matrix and its diagonal term is \( \lambda_{i} \), \( i = 1,2,3 \). This indicates that CEM generally has no weak instability. However, after a close look at Eq. (39), it is found that the first and second columns of \( {\varvec{\Phi}} \) will become identical as \( \beta \sigma = 1/4 \) in the limit \( \varOmega_{0} \to \infty \), such as CEM1. In this case, CEM1 no longer has three linearly independent eigenvectors and thus the matrix A cannot be diagonalized.
As an alternative way to mathematically derive the numerical solution of Eq. (37), there exists a non-singular matrix \( {\varvec{\Psi}} \) to convert the matrix A into a Jordan form such as \( {\mathbf{A}} = {\mathbf{\varPsi J\varPsi }}^{ - 1} \), where J is the Jordan canonical form of the matrix A [46]. As a result, Eq. (37) can be rewritten as:
where the matrices \( {\varvec{\Psi}} \), J and Jn corresponding to CEM1 in the limiting case of \( \varOmega_{0} \to \infty \) are found to be:
where \( \lambda_{3} = 0 \); and \( \lambda_{1} = \lambda_{2} = - 1 \) which can be determined from Eq. (38) by taking \( \beta \sigma = 1/4 \) as \( \varOmega_{0} \to \infty \). After substituting Eqs. (41) in (40), the numerical solution obtained from CEM1 in a mathematical form corresponding to Eq. (36) is found to be:
In this equation, the coefficient of \( \left( {\Delta t} \right)v_{0} \) is very similar to that of the exact solution except for the slight change from \( \varOmega_{0} \) to \( \bar{\varOmega }_{0} \) in the sine term. On the other hand, the coefficient of d0 generally increases with the increase in n and is different from that of exact solution, i.e., \( \cos \left( {n\varOmega_{0} } \right) \), which is a bounded function and varies from −1 to 1. This indicates that dn will rise with the increase in n. Clearly, the growth of dn is a linear function of n, and thus, CEM1 has a weak instability. In general, a weak instability is applicable to polynomial growth in n of arbitrary order. This type of amplitude growth is weaker than that of the instability caused by a spectral radius greater than 1.
This analytical study can be applied to thoroughly explain why CEM1 as shown in Fig. 5a shows a significant amplitude growth, while there is no amplitude growth in Fig. 5c for CEM2. A weak instability for CEM1 is responsible for an amplitude growth found in Fig. 5a, whereas CEM2 has no such a weak instability property, and thus, Fig. 5c exhibits no amplitude growth effect. Clearly, this weak instability property will prevent CEM1 from practical applications. Notice that any combinations of \( \beta \sigma = 1/4 \) will result in a weak instability for CEM due to the lack of three linearly independent eigenvectors in the limit \( \varOmega_{0} \to \infty \).
After this study of CEM, it can be drawn that it can have favorable numerical properties, such as an unconditional stability, a second-order accuracy and an explicit formulation. More importantly, it has no serious disadvantages of the current completely explicit SDIMs, i.e., a weak instability and an overshoot in high-frequency steady-state responses. Notice that a weak instability only occurs for the member of \( \beta \sigma = 1/4 \) and \( \gamma = \tfrac{1}{2} \); and all other members of CEM have no such property. As a result, it is promising for practical applications.
5 Transformation of EDIM into SDIM
A novel family of the completely explicit EDIMs is successfully developed in the solution of the equation of motion for a single degree of freedom system or a modal equation of motion. In addition, it is also shown that this family of EDIMs can have desired numerical properties without any adverse properties. However, it cannot be directly used to solve a multiple degree of freedom system since it is only applicable to solve a modal equation of motion or an equation of motion for a single degree of freedom system. Although it is possible to compute each modal solution by using an EDIM and to obtain a total solution by applying a mode superposition method for linear elastic systems, it is very time-consuming for conducting an eigen-analysis to obtain eigendata for a large system. In addition, a mode superposition method will fail for a nonlinear system. As an alternative, there is a motive to transform all the EDIMs into a SDIM.
It is evident that the avoidance of an eigen-analysis of the problem under dynamic analysis is very important to facilitate the feasibility of SDIMs. The conversion from all the EDIMs to a SDIM can be achieved by using an inverse procedure of an eigen-decomposition technique. As a result, the general formulation of CEM for a multiple degree of freedom system can be generally written as:
where M, \( {\mathbf{C}}_{i + 1} \) and \( {\mathbf{K}}_{i + 1} \) are mass, viscous damping and stiffness matrices; \( {\mathbf{d}}_{i + 1} \), \( {\mathbf{v}}_{i + 1} \), \( {\mathbf{a}}_{i + 1} \) and \( {\mathbf{f}}_{i + 1} \) are nodal vectors of displacement, velocity, acceleration and external force at the end of the (i + 1)-th time step, respectively. The damping matrix \( {\mathbf{C}}_{i + 1} \) and stiffness matrix \( {\mathbf{K}}_{i + 1} \) in the first line of this equation may vary with time for a nonlinear system. Hence, the damping force vector \( {\mathbf{s}}_{i + 1} \) and the restoring force vector \( {\mathbf{r}}_{i + 1} \) are often introduced to replace \( {\mathbf{C}}_{i + 1} {\mathbf{v}}_{i + 1} \) and \( {\mathbf{K}}_{i + 1} {\mathbf{d}}_{i + 1} \) in the solution procedure, respectively.
The coefficient matrices of B1 to B3 and load-dependent vector of \( {\mathbf{p}}_{i + 1} \) in correspondence to Eqs. (12) and (15) for a multiple degree of freedom system are found to be:
where \( {\mathbf{B}} = {\mathbf{M}} + \gamma \sqrt \sigma \left( {\Delta t} \right){\mathbf{C}}_{0} \) and \( {\mathbf{D}} = {\mathbf{M}} + \gamma \sqrt \sigma \left( {\Delta t} \right){\mathbf{C}}_{0} + \beta \sigma \left( {\Delta t} \right)^{2} {\mathbf{K}}_{0} \). Notice that C0 and K0 are the initial damping and stiffness matrices, respectively. Equation (43) with the coefficient matrices shown in Eq. (44) can be spectrally decomposed into a series of EDIMs for each modal equation of motion if the system is assumed to be linear elastic. Since B1 to B3 and \( {\mathbf{p}}_{i + 1} \) are functions of the initial structural properties of M, C0 and K0, thus, CEM with the formulation shown in Eq. (43) is structure dependent. This explains why CEM can be also considered as a SDIM. This conversion is very important since it enables the time integration of a multiple degree of freedom system to be conducted simultaneously for each mode.
6 Implementation
It is of great interest to examine the actual performance of CEM in time integration. Hence, a possible implementation of CEM is implemented. At first, the second line of Eq. (43) can be used to determine the displacement vector di+1 and the solution procedure is described next. The explicit expression of this equation can be written as:
where \( \Delta {\mathbf{d}}_{i + 1} = {\mathbf{d}}_{i + 1} - {\mathbf{d}}_{i} \); and the third term on the right side of this equation must be solved first so that z can be obtained. In fact, the following equation is solved to obtain z:
Hence, the solution of \( \Delta {\mathbf{d}}_{i + 1} \) can be obtained from Eq. (45) after substituting z in it. Based on the displacement vector di+1, the restoring force vector ri+1 in correspondence to this vector can be obtained from an assumed force–displacement relation. Next, the velocity vector can be obtained from the third line of Eq. (43) and is:
Similarly, after obtaining the velocity vector vi+1, the damping force vector si+1 can be obtained from an assumed force–velocity relation. Finally, the acceleration vector ai+1 can be calculated by using the equations of motion and is numerically equivalent to solve:
A direct elimination method is often adopted to solve Eqs. (45) to (48). However, it can be avoided for solving Eq. (48) if M is a diagonal matrix. Similarly, Eqs. (46) and (47) can be also avoided for zero damping. This implementation discloses that no nonlinear iterations are needed for CEM for solving nonlinear velocity-dependent problems.
A direct elimination method consists of a triangulation and a substitution. The triangulation of the matrix of B, D or M is needed to be conducted only once since it is invariant for a whole step-by-step integration procedure. This is the key point for a SDIM to compute efficiently in the nonlinear dynamic analysis although no involvement of nonlinear iteration is a prerequisite for the efficient computations. Notice that a triangulation consumes much more computational efforts than a substitution in a direct elimination method. Many numerical experiments have been conducted to ascertain the superior computational efficiency of SDIMs over conventional integration methods in the solution of general structural dynamics problems [23, 24, 27,28,29], where low-frequency modes almost entirely contribute to the total solution, while the contributions from high-frequency responses are insignificantly.
7 Comparisons of completely explicit SDIMs
After the investigations of CEM, it is of interest to compare its numerical properties, such as unconditional stability, accuracy, overshoot, capability of seizing structural nonlinearity and weak instability, to those of the other completely explicit SDIMs, such as CRM, TLM and KRM. For brevity, the comparisons of these numerical properties are listed in Table 2 for the convenience of the subsequent discussions.
In general, CRM, TLM and KRM only have an unconditional stability for linear elastic and stiffness softening systems, i.e., \( 0 < \delta_{i + 1} \le 1 \), while they become conditionally stable for stiffness hardening systems. Since CEM2 can have an unconditional stability interval of \( 0 < \delta_{i + 1} \le 2 \), it can have unconditional stability for a certain number of stiffness hardening systems in addition to any stiffness softening and linear elastic systems. Hence, its applications to nonlinear dynamic analysis are much more convenient than CRM, TLM and KRM based on stability consideration. All the four completely explicit SDIMs have a second-order accuracy and can be explicitly implemented in the solution of any nonlinear velocity-dependent problems. They will show no overshooting behavior in high-frequency transient responses. However, CRM, TLM and KRM have an unusual overshoot in high-frequency steady-state responses, while CEM exhibits no such an adverse overshoot as shown in Fig. 10. It is illustrated in Fig. 7 that both CEM and TLM can have a better capability of seizing structural nonlinearity when compared to CRM and KRM. It is very important to note that CRM, TLM and KRM have an adverse weak instability property, and thus, an inaccurate solution will be obtained or even numerical instability might be experienced although a time step is appropriately chosen for time integration. In general, CEM has no such an adverse weak instability property except for CEM1.

Free vibration responses to a system with a nonlinear displacement-dependent restoring force
In general, CEM can possess the favorable numerical properties as those of CRM, TLM and KRM, such as unconditional stability for linear elastic, stiffness softening systems, a second-order accuracy, a completely explicit formulation, no overshooting in high-frequency transient responses. On the other hand, it can have some improved numerical properties in contrast to CRM, TLM and KRM, such as a certain of unconditional stability for stiffness hardening systems, a good capability of seizing structural nonlinearity, no unusual overshoot in high-frequency steady-state response and no adverse weak instability. Consequently, it can be concluded that the performance of CEM in the solution of general nonlinear systems will be much better than the current completely explicit SDIMs.
8 Numerical examples
Some numerical examples will be solved by CEM so that its actual performance for solving nonlinear systems, including nonlinear velocity-dependent problems, can be examined. In general, the results obtained from CEM will compare with the solutions either obtained from the Newmark explicit method (NEM) or AAM to show that CEM has a comparable accuracy when compared with general second-order accurate integration methods. The results will also compare with those calculated from the current completely explicit SDIMs so that the enhanced numerical properties can be substantiated. In addition, the analytically obtained stability property for CEM and the effectiveness of the stability amplification factor will be also affirmed by analyzing a 7-story shear building. The computational efficiency of CEM in the solution of nonlinear velocity-dependent problems is also validated.
8.1 A nonlinear displacement-dependent restoring force
There is a nonlinear system that is very useful for evaluating the performance of an integration method in the solution of nonlinear systems. The governing equation of motion can be simply written as:
where the initial stiffness is 1 N/m for u(0) = 0. Hence, \( \omega_{0} = 1 \) rad/s and the initial structural period is found to be \( 2\pi s \). The stiffness will be softening after the system deforms, and thus, the restoring force is nonlinearly displacement dependent. Clearly, both semi-explicit and completely explicit methods can be applied to solve this problem without nonlinear iterations.
A large initial displacement or velocity will lead to a large reduction of the stiffness. The free vibration responses to the initial conditions of u(0) = 0 and \( \dot{u}(0) = 150 \) are plotted in Fig. 7. The result obtained from NEM with \( \Delta t = 0.001\;{\text{s}} \) is considered as a reference solution. The response to this initial value problem is calculated by using CEM2 with \( \Delta t = 0.3\;{\text{s}} \). For comparison, it is also obtained from CRM, TLM and KRM with \( \rho_{\infty } = 0.8 \), where \( \rho_{\infty } \) is the spectral radius of KRM as \( \varOmega_{0} \to \infty \) and is an indicator of numerical damping for high-frequency modes.
It is seen in Fig. 7a, b that CEM2 and TLM can have an acceptable solution with a comparable accuracy to that calculated from NEM with the same time step, whereas the results obtained from CRM and KRM largely deviate from the reference solution. It is seen in Fig. 7c that the system experiences a significant stiffness softening since \( \delta_{i + 1} \) varies between 10−10 and 10−7. This example validates that CEM and TLM can seize the rapid variation of the stiffness softening nonlinearity and thus they give an accurate solution. It is evident that both CRM and KRM cannot have such a good capability of capturing structural nonlinearity and thus they result in an inaccurate solution.
8.2 A nonlinear velocity-dependent damping force
Since the purpose of this work is to develop a completely explicit SDIM for solving a various of nonlinear systems without involving nonlinear iterations. In this example, an equation of motion with a nonlinear velocity-dependent damping force is considered and is expressed as:
where the mass is 1 kg and constant stiffness is 10 N/m. As a result, \( \omega_{0} = \sqrt {10} \;{\text{rad/s}} \) and the structural period is found to be \( 2\pi /\sqrt {10} \approx 1.99\;{\text{s}} \). Clearly, the damping coefficient is \( 1/(1 + \left| {\dot{u}} \right|) \), and thus, the damping force varies nonlinearly and is velocity dependent. Free vibration responses to \( u(0) = 1.0 \) and \( \dot{u}(0) = 10.0 \) will be calculated. A completely explicit method, such as CEM, CRM, TLM and KRM, can solve this problem non-iteratively, whereas a semi-explicit or implicit method will involve an iteration procedure.
The free vibration response obtained from AAM with \( \Delta t = 0.01\;{\text{s}} \) is considered as a reference solution. In addition, CEM2, CRM, TLM and KRM are also used to compute the response with a time step of \( \Delta t = 0.05\;{\text{s}} \). Numerical results are plotted in Fig. 8. Notice that an iteration procedure is required to carry out time integration for AAM. In addition, the average iteration number for each time step is 4.83, while there are no nonlinear iterations for the other integration methods. In general, each completely explicit SDIM can give a reliable solution with a comparable accuracy in contrast to AAM except that KRM exhibits a relatively large response error. This example attests that CEM can solve a velocity-dependent problem without involving nonlinear iterations.

Free vibration responses to a system with a nonlinear velocity-dependent damping force
8.3 A 7-story shear building
To validate that CEM can have a good performance not only for solving a single degree of freedom system but also a multiple degree of freedom system, a 7-story shear building is considered. This building is intentionally designed to have relatively high-frequency modes. The structural and vibrational properties of the building are shown in Fig. 9 for brevity. A lumped mass is assumed for each story and is \( m_{i} = 10^{4} \;{\text{kg}} \), for \( i = 1,2, \ldots ,7 \). On the other hand, the stiffness of the i-th story can be generally expressed as:
where \( \alpha \) is an arbitrary constant; and ui is the displacement at the i-th story. The lowest and the highest initial natural frequencies of the building are found to be 7.62 and \( 10^{4} \;{\text{rad/s}} \), respectively. An appropriate choice of \( \alpha \) can be applied to simulate a different stiffness type of the building. In fact, the following three stiffness types are considered:

Structural and vibrational properties of a 7-story shear-beam building
Since \( \alpha = 0 \) implies a constant ki, thus S2 is a linear elastic system. Clearly, S1 is a stiffness softening system, while S3 is a stiffness hardening system.
At first, S1 is applied to validate that CEM have no overshoot in a high-frequency steady-state response, while the other completely explicit SDIMs have such an adverse overshoot property. For this purpose, a concentrated load of \( f(t) = 10^{12} \sin (20t)N \) is imposed on the bottom story shown in Fig. 9. The result obtained from NEM with a time step of \( \Delta t = 10^{ - 5} \;{\text{s}} \) is considered as a reference solution for comparison. The time integration is also carried out by using CEM2, CRM, TLM and KRM with a time step of \( \Delta t = 0.02\;{\text{s}} \), and the results are plotted in Fig. 10. Notice that \( \Delta t = 0.02\;{\text{s}} \) can accurately integrate the first mode since \( \Delta t/T_{0} \) is as small as 0.024, where \( T_{0} = 2\pi /\omega_{0} = 0.82 \), while a significant period distortion is found for the highest mode. The time step is small enough to faithfully represent the sine loading since the value \( \Delta t/\bar{T} \) is as small as 0.064, where \( \bar{T} = 2\pi /\bar{\omega } \), and \( \bar{\omega } = 20\;{\text{rad/s}} \) [41]. Apparently, CEM2 provides very accurate solutions, while CRM, TLM and KRM lead to inaccurate solutions. This is because that they have an adverse overshoot in high-frequency steady-state responses.

Bottom story responses to applied sine load for S1
The free vibration responses to an initial displacement vector u(0) with zero velocity vector for S2 are applied to confirm that there is no weak instability for CEM2. Since the seventh mode has a natural frequency as high as \( 10^{4} \;{\text{rad/s}} \), its modal shape is chosen to be the initial displacement vector, i.e., \( {\mathbf{u}}(0) = \phi_{7} \). The free vibration responses are calculated by CEM2, CRM, TLM and KRM with the time step of \( \Delta t = 10^{ - 2} \;{\text{s}} \). Numerical solutions are plotted in Fig. 11. For comparison, the solution obtained from NEM with \( \Delta t = 10^{ - 5} \;{\text{s}} \) is considered as a reference solution. It is manifested from Fig. 11a that there is no unusual amplitude growth for CEM2 although it is unable to give a reliable solution due to the adoption of a relatively large time step, whereas a significant amplitude growth is found in Figs. 11b, c. An amplitude growth is also found in the early response as shown in Fig. 11d for KRM. However, the response diminishes to zero due to a high-frequency numerical damping. It is evident that CEM2 has no weak instability, while CRM, TLM and KRM exhibit a critical defect of weak instability.

Bottom story responses to initial displacement vector of the seventh modal shape for S2
In general, a SDIM exhibits no unconditional stability for stiffness hardening systems unless an appropriate stability amplification factor is adopted. The importance of the adoption of \( \sigma = 2 \) for CEM will be illustrated by using S3. For this purpose, S3 is subjected to an earthquake ground record of TCU084, which was collected from the mainshock of Chi–Chi earthquake in Taiwan with a time interval of \( 5 \times 10^{ - 3} \;{\text{s}} \). In addition, the peak ground acceleration of TCU084 is scaled to 0.5 g. The result obtained from using AAM with a time step of \( \Delta t = 5 \times 10^{ - 3} \;{\text{s}} \) is considered as a reference solution for comparison. Meanwhile, CEM2, CRM, TLM and KRM are also applied to calculate the seismic responses by using the same time step. Calculated results are shown in Fig. 12. In addition, the instantaneous degree of nonlinearity of each mode for each time step is also computed by using Eq. (23) and the results of \( \delta_{i}^{(k)} \) for \( k = 1,3,5 \) and 7 are plotted in Fig. 13. It is found in Fig. 12a that the result obtained from CEM2 coincided with the reference solution. On the other hand, the results calculated from CRM, TLM and KRM become unstable after about 8 s. Clearly, different stability properties for stiffness hardening systems are responsible for the different phenomena in seismic responses. It is seen in Fig. 13 that \( \delta_{i}^{(k)} \) generally varies between 1 and 1.8 for each mode. Clearly, there exists no stability problem for CEM2 since it can have an unconditional stability interval of \( 0 < \delta_{i + 1} \le 2 \). In addition, the time step is small enough to accurately integrate the low-frequency modes. As a result, an accurate solution is obtained. On the other hand, the violation of the upper stability limit for the highest mode is responsible for numerical explosions for using CRM, TLM and KRM. In Fig. 13d, the maximum value of \( \delta_{i}^{(7)} \) is about 1.005, whose corresponding upper stability limit for CRM and TLM is found to be about 28.28 [36], while for KRM, it is found to be about 45.82 [35]. On the other hand, the product of the highest initial natural frequency and step size is as large as \( \varOmega_{0}^{(7)} = \omega_{0}^{(7)} (\Delta t) = 50 \), which is larger than each upper stability limit. As a result, an instability occurs.

Top story responses of S3 under Chi–Chi earthquake record TCU084

Time histories of instantaneous degree of nonlinearity for some modes
8.4 A large assemblage of mass-dashpot-spring system
A series of nonlinear mass-dashpot-spring system is considered and is schematically shown in Fig. 14, where \( m_{i} = 1\;{\text{kg}} \) for \( i = 1,2, \ldots ,n. \) The damping force for each degree of freedom consists of two different damping types. One is a linear dashpot cL, and the other is a nonlinear velocity-dependent damper cN. Hence, the damping coefficient for each degree of freedom can be written as:
where \( c_{i}^{L} \) is a constant and \( c_{i}^{N} \) is defined as:

Free vibration response to a velocity-dependent problem
In general, \( x > 0 \) and \( y > - 1 \) are generally found [3]. In this exploration, \( x = 10 \) and \( y = - \tfrac{1}{2} \) are taken. Meanwhile, the stiffness is assumed to be a combination of a linear part and a nonlinear function of drift and is defined as:
In general, the story stiffness will reduce for nonzero drift, i.e., \( u_{i} - u_{i - 1} \ne 0 \).
Finally, an equation for the assemblage of the mass-dashpot-spring system can be derived and also expressed as shown in Eq. (1). In general, the mass matrix \( {\mathbf{M}} = {\mathbf{I}} \) is found and is a unit matrix; and the viscous damping coefficient matrix is \( {\mathbf{C}} = {\mathbf{C}}^{L} + {\mathbf{C}}^{N} \). For simplicity, \( {\mathbf{C}}^{L} \) is assumed to be a stiffness-proportional damping, i.e., a function of the stiffness matrix. As a result, \( {\mathbf{C}}^{L} \), \( {\mathbf{C}}^{N} \) and the stiffness matrix K can be explicitly expressed as:
where a1 can be determined from a specified viscous damping ratio of the fundamental mode [47], i.e., \( a_{1} = 2\xi_{0}^{(1)} /\omega_{0}^{(1)} \). Apparently, K is a nonlinear function of displacement and thus a nonlinear restoring force is displacement dependent, whereas C is a nonlinear function of displacement and velocity and thus a nonlinear damping force is both displacement and velocity dependent. Hence, this equation can be explicitly solved by a completely explicit method, while it must be iteratively solved by a semi-explicit or an implicit method.
The choices of \( n = 250 \), 500 and 1000 will be applied to simulate the systems of 250-DOF, 500-DOF and 1000-DOF, respectively. The lowest and highest undamped natural frequencies are found before conducting time integration and are listed in Table 3. The lowest natural frequency is applied to determine \( a_{1} \) by taking \( \xi_{0}^{(1)} = 0.05 \) for the fundamental mode. Each system is subject to a sine acceleration of ag at its base. The Chang semi-explicit method (CSM) [24], AAM and CEM2 are adopted to calculate the solutions, and each analysis is conducted for a total of \( N = 100 \) steps. A maximum allowable time step is chosen for time integration. Hence, the loading duration of each analysis is found to be \( t_{d} = 100 \times \left( {\Delta t} \right) \). All these data are also summarized in Table 3 for brevity. The results obtained from AAM with \( \Delta t = 0.01 \), 0.02 and 0.04 s are treated as reference solutions for the systems of 250-DOF, 500-DOF and 1000-DOF, respectively.
The solutions of the three systems are plotted in Fig. 15. In each plot of this figure, it is seen that AAM, CSM and CEM2 give almost the same solutions and the solutions only slightly deviate from the reference solutions. Thus, \( \Delta t = 0.075 \), 0.15 and 0.3 s can be considered as the maximum allowable time steps to yield reliable results for the 250-DOF, 500-DOF and 1000-DOF systems, respectively. Two conclusions can be drawn from the results. One is that CEM2 can have the same performance as a semi-explicit SDIMs or an implicit method in the solution of nonlinear velocity-dependent problems; and the other is that an unconditional stability for stiffness softening systems is indicated since the value of \( \omega_{0}^{(n)} (\Delta t) \) for the highest mode of each system is as large as 150, 300 and 600 corresponding to the 250-DOF, 500-DOF and 1000-DOF systems.

Forced vibration responses of nonlinear velocity-dependent systems
It is of interest to examine the CPU time consumed by a completely explicit method (CEM), a semi-explicit method (CSM) and an implicit method (AAM) in the step-by-step solution of this nonlinear velocity-dependent problem. For this purpose, the CPU time consumed for each dynamic analysis is recorded and summarized in Table 4. Meanwhile, the average iteration number for each time step for each method is also listed in this table. Since CEM involves no nonlinear iterations for each time step, its average iteration number is set to 1. It is seen that CSM will consume almost the same CPU time as that of AAM for each system since an iteration procedure is needed for each time step for both methods and they involve almost the same average iteration number for each analysis. It is evident that CEM involves much less CPU time in contrast to AAM and CSM. This is because that it involves no nonlinear iterations for each time step. This thoroughly explains why CEM is very computationally efficient in contrast to AAM and CSM. A ratio of R is defined as the CPU time consumed by CEM over that consumed by CSM and is shown in the last column. It seems that R decreases with the increase in the total number of the degree of freedom. In fact, \( R = 0.043 \), 0.025 and 0.023 correspond to the systems of 250-DOF, 500-DOF and 1000-DOF. This implies that the computational efficiency of CEM will increase as a total number of the degree of freedom of the system increases.
In this example, it is evident that a completely explicit SDIM can be applied to solve nonlinear velocity-dependent problems without nonlinear iterations, while an iteration procedure is required for a semi-explicit SDIM and an implicit method. Hence, the effectiveness of a completely explicit method for solving such nonlinear velocity-dependent problems is substantiated when compared to a semi-explicit method and an implicit method.
9 Conclusions
Although semi-explicit integration methods can be found in conventional integration methods, there exists no completely explicit integration method. Hence, an iterative method must be adopted for solving nonlinear velocity-dependent problems if using conventional integration methods. On the other hand, most SDIMs are semi-explicit integration methods and a few are completely explicit methods. These completely explicit SDIMs can be applied to solve nonlinear velocity-dependent problems without nonlinear iterations. However, all current completely explicit SDIMs have serious disadvantages of unusual overshoot in high-frequency steady-state responses, weak instability and conditional stability for stiffness hardening systems. Hence, it is still of great interest to develop a completely explicit SDIM that has no such disadvantages. An eigen-based theory is used to develop a completely explicit SDIM in this work.
An eigen-based theory can provide a solid foundation for developing the SDIM and a proof of its feasibility for time integration. The proposed family of SDIMs is a completely explicit method, and it can be explicitly implemented for solving structural dynamics problems, including nonlinear velocity-dependent problems, without involving nonlinear iterations for each time step. In general, it can have an unconditional stability for linear elastic and stiffness softening systems and a certain of stiffness hardening systems; a good capability of seizing structural nonlinearity and a second-order accuracy. In addition, it has no overshoot in high-frequency transient or steady-state responses. More importantly, it has no adverse weak instability except for the member of \( \beta \sigma = \tfrac{1}{4} \) and \( \gamma = \tfrac{1}{2} \). These properties substantiate that the proposed family of SDIMs are much better than the current completely explicit SDIMs. Since it can be applied to solve nonlinear velocity-dependent problems non-iteratively, it can save many computational efforts in contrast to a semi-explicit method or an implicit method. Numerical confirmations reveal that the CPU demand of the proposed family of completely explicit SDIMs can be only about 2.3% of that consumed by a semi-explicit method or an implicit method for a 1000-DOF system. As a result, it is competitive with other second-order accurate methods.
The superiority of the proposed family of SDIMs over the current completely explicit SDIMs is summarized in Table 2, where the most significant improvements are no weak instability except for \( \beta \sigma = \tfrac{1}{4} \) and no overshoot in high-frequency steady-state responses. In general, the member of \( \beta = \tfrac{1}{4} \) and \( \gamma = \tfrac{1}{2} \) of the proposed family of SDIMs with \( \sigma = 2 \) is strongly recommended for practical applications since it can have a second-order accuracy and an unconditional stability interval of \( 0 < \delta_{i + 1} \le 2 \) because it is rare for a realistic structure that will experience \( 2 < \delta_{i + 1} \). This member can be applied to solve a general nonlinear problem, either nonlinear restoring force or nonlinear damping force or the combined action of both forces, without involving any nonlinear iterations.
References
Sadek, F., Mohraz, B., Riley, M.A.: Linear procedures for structures with velocity-dependent dampers. J. Struct. Eng. 126(8), 887–895 (2000)
Oua, J.P., Long, X., Li, Q.S.: Seismic response analysis of structures with velocity-dependent dampers. J. Constr. Steel Res. 63, 628–638 (2007)
Citterio, M., Talamo, R.: Damped oscillators: A continuous model for velocity dependent drag. Comput. Math Appl. 59, 352–359 (2010)
Laalej, H., Lang, Z.Q., Daley, S., Zazas, I., Billings, S.A., Tomlinson, G.R.: Application of non-linear damping to vibration isolation: an experimental study. Nonlinear Dyn. 69, 409–421 (2012)
Alotta, G., Cavaleri, L., Di Paola, M., Ferrotto, M.F.: Solutions for the design and increasing of efficiency of viscous dampers. Open Constr. Build. Technol. J. 10, 106–121 (2016)
Building Seismic Safety Council (BSSC). NEHRP guidelines for the seismic rehabilitation of buildings. FEMA 273, Washington, DC (1997)
Newmark, N.M.: A method of computation for structural dynamics. J. Eng. Mech. Div. 85, 67–94 (1959)
Hilber, H.M., Hughes, T.J.R., Taylor, R.L.: Improved numerical dissipation for time integration algorithms in structural dynamics. Earthq. Eng. Struct. Dyn. 5, 283–292 (1977)
Wood, W.L., Bossak, M., Zienkiewicz, O.C.: An alpha modification of Newmark’s method. Int. J. Numer. Methods Eng. 15, 1562–1566 (1981)
Chang, S.Y., Mahin, S.A.: Two new implicit algorithms of pseudodynamic test methods. J. Chin. Inst. Eng. 16(5), 651–664 (1993)
Chung, J., Hulbert, G.M.: A time integration algorithm for structural dynamics with improved numerical dissipation: the generalized-α method. J. Appl. Mech. 60(6), 371–375 (1993)
Chang, S.Y.: Analytical study of the superiority of the momentum equations of motion for impulsive loads. Comput. Struct. 79(15), 1377–1394 (2001)
Zhou, X., Tamma, K.K.: Design, analysis, and synthesis of generalized single step single solve and optimal algorithms for structural dynamics. Int. J. Numer. Methods Eng. 59, 597–668 (2004)
Kim, W., Choi, S.Y.: An improved implicit time integration algorithm: The generalized composite time integration algorithm. Comput. Struct. 196, 341–354 (2018)
Lopez, S.: Changing the representation and improving stability in time-stepping analysis of structural non-linear dynamics. Nonlinear Dyn. 46, 337–348 (2006)
Lopez, S.: Relaxed representations and improving stability in time-stepping analysis of three- dimensional structural nonlinear dynamics. Nonlinear Dyn. 69, 705–720 (2012)
Shojaee, S., Rostami, S., Abbasi, A.: An unconditionally stable implicit time integration algorithm: modified quartic B-spline method. Comput. Struct. 153, 98–111 (2015)
Wang, J., Li, Z.: Implementation of HHT algorithm for numerical integration of multibody dynamics with holonomic constraints. Nonlinear Dyn. 80, 817–825 (2015)
Sun, K., Qiu, J., Karimi, H.R., Gao, H.: A novel finite-time control for nonstrict feedback saturated nonlinear systems with tracking error constraint. IEEE Trans. Syst. Man Cybern. Syst. (2019). https://doi.org/10.1109/tsmc.2019.2958072
Sun, K., Liu, L., Qiu, J., Feng, G.: Fuzzy adaptive finite-time fault-tolerant control for strict-feedback nonlinear systems. IEEE Trans. Fuzzy Syst. (2020). https://doi.org/10.1109/tfuzz.2020.2965890
Sun, K., Jianbin, Q., Karimi, H.R., Fu, Y.: Event-triggered robust fuzzy adaptive finite-time control of nonlinear systems with prescribed performance. IEEE Trans. Fuzzy Syst. (2020). https://doi.org/10.1109/tfuzz.2020.2979129
Chang, S.Y.: Explicit pseudodynamic algorithm with unconditional stability. J. Eng. Mech. 128(9), 935–947 (2002)
Chang, S.Y.: An explicit method with improved stability property. Int. J. Numer. Method Eng. 77(8), 1100–1120 (2009)
Chang, S.Y.: A new family of explicit method for linear structural dynamics. Comput. Struct. 88(11–12), 755–772 (2010)
Chang, S.Y., Yang, Y.S., Hsu, C.W.: A family of explicit algorithm for general pseudodynamic testing. Earthq. Eng. Eng. Vib. 10(1), 51–64 (2011)
Gui, Y., Wang, J.T., Jin, F., Chen, C., Zhou, M.X.: Development of a family of explicit algorithms for structural dynamics with unconditional stability. Nonlinear Dyn. 77(4), 1157–1170 (2014)
Chang, S.Y.: A family of non-iterative integration methods with desired numerical dissipation. Int. J. Numer. Methods Eng. 100(1), 62–86 (2014)
Chang, S.Y.: Dissipative, non-iterative integration algorithms with unconditional stability for mildly nonlinear structural dynamics. Nonlinear Dyn. 79(2), 1625–1649 (2015)
Chang, S.Y.: A dual family of dissipative structure-dependent integration methods. Nonlinear Dyn. 98(1), 703–734 (2019)
Chang, S.Y.: Family of structure-dependent explicit methods for structural dynamics. J. Eng. Mech. 140(6), 06014005 (2014)
Chen, C., Ricles, J.M.: Development of direct integration algorithms for structural dynamics using discrete control theory. Earthq. Eng. Struct. Dyn. 134(8), 676–683 (2008)
Tang, Y., Lou, M.L.: New unconditionally stable explicit integration algorithm for real-time hybrid testing. J. Eng. Mech. 143(7), 04017029 (2017)
Kolay, C., Ricles, J.M.: Development of a family of unconditionally stable explicit direct integration algorithms with controllable numerical energy dissipation. Earthq. Eng. Struct. Dyn. 43, 1361–1380 (2014)
Chang, S.Y.: Discussion of paper ‘Development of a family of unconditionally stable explicit direct integration algorithms with controllable numerical energy dissipation’ by Chinmoy Kolay and James M. Ricles, Earthquake Engineering and Structural Dynamics 2014; 43: 1361–1380. Earthq. Eng. Struct. Dyn. 44(2), 325–328 (2015)
Chang, S.Y.: Assessments of dissipative structure-dependent integration methods. Struct. Eng. Mech. 62(2), 151–162 (2017)
Chang, S.Y.: Performances of non-dissipative structure-dependent integration methods. Struct. Eng. Mech. 65(1), 91–98 (2018)
Chang, S.Y.: Choices of structure-dependent pseudodynamic algorithms. J. Eng. Mech. ASCE 145(5), 04019029 (2019)
Lax, P.D., Richtmyer, R.D.: Survey of the stability of linear finite difference equations. Commun. Pure Appl. Math. 9, 267–293 (1956)
Belytschko, T., Hughes, T.J.R.: Computational Methods for Transient Analysis. Elsevier, North-Holland (1983)
Chang, S.Y.: An unusual amplitude growth property and its remedy for structure-dependent integration methods. Comput. Methods Appl. Mech. Eng. 330, 498–521 (2018)
Chang, S.Y.: Accurate representation of external force in time history analysis. J. Eng. Mech. 132(1), 34–45 (2006)
Chang, S.Y.: A general technique to improve stability property for a structure-dependent integration method. Int. J. Numer. Methods Eng. 101(9), 653–669 (2015)
Bathe, K.J., Wilson, E.L.: Stability and accuracy analysis of direct integration methods. Earthq. Eng. Struct. Dyn. 1, 283–291 (1973)
Goudreau, G.L., Taylor, R.L.: Evaluation of numerical integration methods in elasto-dynamics. Comput. Methods Appl. Mech. Eng. 2, 69–97 (1972)
Hilber, H.M., Hughes, T.J.R.: Collocation, dissipation, and ‘overshoot’ for time integration schemes in structural dynamics. Earthq. Eng. Struct. Dyn. 6, 99–118 (1978)
Strang, G.: Linear Algebra and its Applications, 3rd edn. Harcourt Brace Jovanovich, International Edition, San Diego (1986)
Clough, R., Penzien, J.: Dynamics of Structures, 3rd edn. Computers & Structures, Inc., Berkeley (2010)
Acknowledgements
The author is grateful to acknowledge that this study is financially supported by the Ministry of Science and Technology, Taiwan, R.O.C., under Grant No. MOST-108-2221-E-027-017.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author declares that he has no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Chang, SY. Non-iterative methods for dynamic analysis of nonlinear velocity-dependent problems. Nonlinear Dyn 101, 1473–1500 (2020). https://doi.org/10.1007/s11071-020-05836-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-020-05836-8