
Abstract
A new methodology is developed in this work to solve a one-dimensional (1D) nonlinear wave propagation problem. In its response, the space variable is converted to time functions at different locations, and the resultant time functions are merged with the time variable. Since the merged variables are essentially time-delay variables, the main point of the methodology is that the governing equation of the nonlinear wave propagation problem can be converted to a corresponding nonlinear delay differential equation (DDE) with multiple delays. The new methodology is shown how to formulate the converted DDE, and a modified incremental harmonic balance method is used to solve the 1D nonlinear DDE by introducing a delay matrix operator, where a formula of the Jacobian matrix is derived and can be efficiently and automatically used in the Newton method. This new methodology is demonstrated by solving examples of 1D monatomic chains under the nonlinear Hertzian contact law and with cubic springs. Results well match those in previous works, but derivation effort of solutions and calculation time can be significantly reduced here. When the algorithm of the methodology is compiled as a computer program, there is no additional derivation required to solve wave propagation problems associated with different governing equations.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Wave propagation has been extensively studied in the literature. Wave dispersion relations can reflect the nature of different types of waves in materials and structures and become a main topic of wave propagation problems. The wave theorem in elastic solids and experimental validation can be found in [1].
Many interesting phenomena such as stop bands, pass bands, and tunable band-gap characteristics can exhibit in periodic materials and structures [2]. Elastic wave propagation characteristics in elastic periodic structures are mainly obtained under linear approximation [3]. Waves in periodic structures with nonlinearities can exhibit tunable wave propagation characteristics [4]. However, some inherent relations between nonlinearities and wave propagation characteristics in elastic structures are largely unknown. Hence, influence of nonlinearities on elastic waves in materials and structures is important for control of high-strength elastic waves in solids. Many investigations in the literature mainly focus on discrete chain-like structures. Nonlinear chains were investigated in [5] with consideration of ground springs and external forcing via a multiple-scale perturbation method. Monocoupled subsystem chains with cubic nonlinearities were investigated in [6] and amplitude-dependent nonlinear wave propagation characteristics were obtained there. Wave solutions of a discrete lattice with weak nonlinearities were obtained by Sreelatha and Joseph [7]. Narisetti et al. [8] studied wave solutions of a discrete nonlinear structure using a perturbation method and obtained amplitude-dependent characteristics of a nonlinear periodic structure. Group velocities of a discrete nonlinear periodic lattice was studied in [9] via a perturbation method. Amplitude-dependent dispersion in nonlinear periodic structures was studied by Manktelow [10] via a transfer matrix method. Recently, Packo [11] studied Lamb wave propagation characteristics of nonlinear plates using a perturbation method and obtained tunable band-gap characteristics. Autrusson et al. [12] studied reflection of longitudinal waves and Rayleigh waves at the edge of a quadratically nonlinear elastic plate based on perturbation methods. Wang et al. [13] adopted the Lindstedt–Poincare perturbation method to analyze wave propagation in a one-dimensional (1D) chain of an atomic lattice. To deal with a wave propagation problem with strong nonlinearities, a harmonic balance method was employed to analyze wave propagation characteristics of nonlinear periodic lattices [14], where compounded time and space variables are used as the coordinate of harmonic functions. Frandsen and Jensen [15] adopted a mass-spring system to study a weakly nonlinear periodic chain and analyzed variation of a band-gap structure using a multiple-scale method. Lazarov and Jensen [16] analyzed linear chains with nonlinear oscillators and revealed amplitude-dependent dispersion relations based on a harmonic balance method. Duan et al. [17] studied coupled nonlinear waves in two-dimensional lattices and derived the coupled Korteweg–deVries equation and a nonlinear dispersion relation. In the above methods, derivation of solutions can be complicated and calculation can be costly when there are strong nonlinearities and large degrees of freedom of systems.
To overcome these issues, a new methodology is proposed in this work to calculate steady-state periodic responses of wave propagation problems. Although wave responses travel in the space coordinate, they can be treated as stationary vibration responses if space phase differences can be compensated by time functions. This compensation can be done for the steady-state wave responses due to their unchanged space periodicity, and the time functions are time delays in the vibration responses. Consider an individual lattice unit that can be a particle or segment that repeats in a structure; motions of its adjacent particles or segments are the same as that of this unit with different delays. In this methodology, the governing equation of a 1D wave propagation problem is first converted to a corresponding delay differential equation (DDE) with multiple delays. A modified incremental harmonic balance (IHB) method that was developed in [18] is used to solve the DDE, and wave propagation solutions are constructed from solutions of the DDE.
Much work has been done to develop methods to solve DDEs. The center manifold method is commonly used to theoretically study stability of autonomous DDEs and Hopf bifurcations in the neighborhood of the origin [19]. It can be used to find amplitudes of limit cycles [20] and calculate critical delays for Hopf bifurcations [21, 22]. For a nonlinear time-delay system, a perturbation method was adopted to convert it to a linear time-delay system [23], whose local stability can be studied. Besides the above analytical methods, there are many numerical methods to solve DDEs. The Chebyshev collocation method [24], the semi-discretization method [25], and the temporal finite element analysis method [26] are usually used to obtain responses and analyze stability of time-delay systems. An IHB method has also been used to obtain periodic solutions of DDEs [27]. A modified IHB method was developed in [28] to automatically and efficiently obtain periodic solutions of a single-degree-of-freedom nonlinear system, where calculation time was reduced by over a hundred times. This method was extended to solve different types of differential equations, such as a multi-degree-of-freedom ordinary differential equation [29], a partial differential equation (PDE) [30], and an autonomous DDE [18]. In the extended IHB method for solving the DDE, delayed variables can be explicitly expressed by premultiplying the dependent variable by a delay matrix operator. The matrix operator is time-invariant if time delays are constant. Although the residual and each column of the Jacobian matrix can be obtained by the fast Fourier transform (FFT) [27], calculation effort can be significant if the order of the Fourier series is high. A semi-analytical method was developed in [30] to efficiently construct the Jacobian matrix for a PDE, and the procedure there was modified in [18] to construct the Jacobian matrix for the DDE. Due to direct construction of the Jacobian matrix by a matrix operation formula, integration of Jacobian matrix calculation is eliminated and calculation efficiency is significantly improved based on previous work results. In this work, the converted DDE from a wave propagation problem involves not only time delays but also time advances. Thus, the method in [18] is modified here to deal with the residual and Jacobian matrix calculation with both time delays and advances. Compared with perturbation methods that were used to solve nonlinear wave propagation problems, application of the new methodology with the IHB method is to solve steady-state periodic solutions, which can be used for dispersion analysis of phononic crystals. Advantages of the proposed methodology are as follows: (1) it can deal with strong and general nonlinearities, such as an equation under the nonlinear Hertzian contact law [14], where perturbation methods may fail; (2) it can handle large degree-of-freedom systems; and (3) while derivation of the algorithm of the methodology is complex, the algorithm can be compiled as a computer program and calculation can be automatically implemented by it for different wave propagation problems, where a customized derivation is usually needed if a perturbation method is used for a new problem.
In the next section, the governing equation of a 1D nonlinear wave propagation problem is converted to a nonlinear DDE with multiple delays. The new methodology with the IHB method is presented to solve steady-state periodic solutions of the DDE. Finally, monatomic 1D chains in [14] under the nonlinear Hertzian contact law and [8] with cubic springs are used as examples to demonstrate the detailed solution procedure; dispersion characteristics are shown to well match those in the previous works.
2 Solutions of a 1D wave propagation problem by solving a DDE
2.1 Construction of a DDE for a 1D wave propagation problem
The governing equation of a 1D wave propagation problem with general nonlinearities can be written as
where \(F(\cdot )\) is a nonlinear function, \(u^{(j)}\) is the response of the j-th particle, \(n_{\mathrm{R}}\) and \(n_{\mathrm{L}}\) are numbers of its right- and left-sided particles, respectively, that interact with it, t is the time variable, and an overdot denotes a time derivative. The goal of this work is to calculate steady-state periodic solutions of \(u^{(j)}(t)\). Due to periodicity of steady-state wave propagation, the number j of the particle of interest is set to zero; \(u^{(0)}(t)\) is denoted by u(t) for simplification. Equation (1) then becomes
and a solution of \(u^{(j)}\) with \(j=-n_{\mathrm{L}},\ldots ,n_{\mathrm{R}}\) is written as
where \(\omega \) is the angular frequency of the wave propagation problem and \(\mu \) is the wave number. One can define delayed variables of u(t) in Eq. (3):
where \(T_{j}=\mu j\) is the time delay of the j-th particle. The governing equation in Eq. (2) then becomes a nonlinear DDE with multiple delays:
where \(\omega \) and \(\mu \) are parameters of the DDE. Note that \(u_{0}\) is denoted by u in what follows. State-steady periodic solutions of the original wave propagation problem are equivalent to those of the DDE, which can be effectively solved using the new methodology.
2.2 Steady-state periodic solutions of the nonlinear DDE
The IHB method is presented here to solve the DDE in Eq. (5), where the Jacobian matrix is directly constructed by a semi-analytically derived formula, and significant calculation effort can be saved. Note that Eq. (5) includes both time delays and advances. First, a dimensionless time variable is defined as \(\tau =\omega t\), and the first and second time derivatives of u(t) are
respectively, where a prime denotes a derivative with respect to \(\tau \). The delayed variables are
With normalization of Eq. (5), the DDE is changed to
and its steady-state solution \(u(\tau )\) can be approximated by a series of harmonic functions:
where M is the order of the truncated Fourier series, the superscript \(\mathrm {T}\) denotes the transpose of a vector or matrix, \(\mathbf{C }_{\mathrm{s}}\) is the set of basis functions:
and \(\mathbf{q }=\left[ a_{0}\ a_{1}\ \cdots a_{M}\ b_{1}\ \cdots b_{M}\right] ^{\mathrm {T}}\) is the generalized coordinate vector for \(\mathbf{C }_{\mathrm{s}}\). The first and second derivatives of u are obtained by applying a derivative matrix operator \(\mathbf{G }\) on the generalized coordinate vector \(\mathbf{q }\):
respectively, where
in which \({\varvec{0}}_{M}\) (\({\varvec{0}}_{M\times M}\)) is the M-dimensional zero vector (matrix).
The delayed variable \(u_{j}\) can be expressed by applying a delay matrix operator on \(\mathbf{q }\), as shown below. Using Eq. (8) in Eq. (10) yields
Expanding trigonometric functions
with \(m=1,\ldots ,M\), and converting them to a matrix form yield
where
is the delay matrix operator for the delay \(T_{j}\). Note that both the derivative and delay matrix operators are linear and their superposition property is useful in later derivation. Substituting a guess solution of \(\mathbf{q }\) into Eq. (9) yields
where \(r(\tau ,\mathbf{q },\omega ,\mu )\) is the residual of the function F. The goal here is to find an approximated solution of \(\mathbf{q }\) so that each harmonic component of the residual r vanishes. A set of orthogonal basis functions
is used in the Galerkin procedure on r, which yields the harmonic balanced residual \(\mathbf{r }\) of the nonlinear DDE:
which is a column vector with the same size as that of \(\mathbf{C }_{s1}\). The FFT is used to obtain components in \(\mathbf{r }\), as explained below. One can obtain a set of residuals \(\left[ r(\tau _{n},\mathbf{q },\omega ,\mu )\right] _{n=0,\ldots ,M_{T}-1}\) by evaluating \(r(\tau ,\mathbf{q },\omega ,\mu )\) at discrete times \(\left[ \tau _{n}=\frac{2\pi n}{M_{T}}\right] _{n=0,\ldots ,M_{T}-1}\), where \(M_{T}\) is the number of samples in a period \(2\pi \). Thus, the harmonic balanced residual \(\mathbf{r }(\mathbf{q },\omega ,\mu )\) can be efficiently calculated by conducting the FFT of the set \(\left[ r(\tau _{n},\mathbf{q },\omega ,\mu )\right] _{n=0,\ldots ,M_{T}-1}\).
The next step is to calculate Jacobian matrices of \(\mathbf{r }(\mathbf{q },\omega ,\mu )\) with respect to \(\mathbf{q }\), \(\omega \) and \(\mu \). If the residual \(r(\tau ,\mathbf{q },\omega ,\mu )\) is uniformly convergent, Jacobian matrices of the harmonic balanced residual \(\mathbf{r }(\mathbf{q },\omega ,\mu )\) are
By comparing Eqs. (17) and (18) with Eq. (16), \(\mathbf{J }_{\omega }\) and \(\mathbf{J }_{\mu }\) can be obtained from FFTs of \(\frac{\partial r}{\partial \omega }=\frac{\partial F}{\partial \omega }\) and \(\frac{\partial r}{\partial \mu }=\frac{\partial F}{\partial \mu }\), respectively. However, \(\mathbf{J }_{\mathbf{q }}\) cannot be calculated this way since neither \(\frac{\partial r}{\partial \mathbf{q }}\) can be directly obtained from the nonlinear function F nor the FFT of \(\frac{\partial r}{\partial \mathbf{q }}\) can be conducted. Hence, \(\frac{\partial r}{\partial \mathbf{q }}\) is expanded by substituting Eqs. (11)–(13) into Eq. (15), which yields
where \(\mathbf{D }_{0}\) is the \((2M+1)\)-dimensional identity matrix by substituting \(j=0\) into Eq. (14). Note that partial differential functions \(F_{dd}=\frac{\partial F}{\partial u^{\prime \prime }}\), \(F_{d}=\frac{\partial F}{\partial u'}\) and \(F_{j}=\frac{\partial F}{\partial u_{j}}\) are all analytical functions that can be easily derived for a given F. Substituting Eq. (20) into Eq. (19) and moving constant matrices \(\mathbf{G }^{2}\), \(\mathbf{G }\) and \(\mathbf{D }_{j}\) out of integrals yield
While one can conduct FFTs of all components of all row vectors in the above integrals, much repeated calculation makes the approach inefficient. A semi-analytical formula of \(\mathbf{J }_{\mathbf{q }}\) is derived here, where only Fourier coefficients of scalar functions \(F_{dd}\), \(F_{d}\) and \(F_{j}\) are needed. Note that the form of the integrals in Eq. (21) is \(\frac{1}{\pi }\int _{0}^{2\pi }\mathbf{C }_{s1}f(\tau )\mathbf{C }_{\mathrm{s}}^{\mathrm {T}}\mathrm{d}\tau \), where \(f(\tau )\) are partial differential functions. One can express \(f(\tau )\) by the Fourier series, i.e., \(f(\tau )=\Phi ^{\mathrm {T}}\mathbf{f }\), where
and \(\mathbf{f }=\left[ f_{-M}\ \cdots \ f_{M}\right] ^{\mathrm {T}}\) is the Fourier coefficient vector that can be obtained by the FFT of \(f(\tau )\). The following formula then holds:
where

and \(\mathbf{f }_{T}\) is a truncated Toeplitz form of \(f(\tau )\):
Thus, \(\mathbf{J }_{\mathbf{q }}\) in Eq. (21) can be directly calculated with use of the formula in Eq. (22):
where \(\mathbf{f }_{dd,T}\), \(\mathbf{f }_{d,T}\) and \(\mathbf{f }_{j,T}\) are Toeplitz forms of \(F_{dd}\), \(F_{d}\) and \(F_{j}\), respectively, which can be constructed by their Fourier coefficients. This formula of \(\mathbf{J _{\mathrm {q}}}\) only requires one to calculate FFTs of \(F_{dd}\), \(F_{d}\) and \(F_{j}\) , and calculation can be efficient even if high-order harmonics are needed for problems with strong nonlinearities.
With use of formulas of the harmonic balanced residual \(\mathbf{r }(\mathbf{q },\omega ,\mu )\) and Jacobian matrices \(\mathbf{J }_{\omega }\), \(\mathbf{J }_{\mu }\) and \(\mathbf{J _{\mathrm {q}}}\) in Eqs. (16)–(18) and (24), guess solutions of \(\omega \), \(\mu \) and \(\mathbf{q }\) can be updated by the Newton method to find final solutions \(\omega =\omega _{\mathrm{ss}}\), \(\mu =\mu _{\mathrm{ss}}\) and \(\mathbf{q }=\mathbf{q }_{\mathrm{ss}}\), respectively, so that the Euclidean norm of \(\mathbf{r }(\mathbf{q }_{\mathrm{ss}},\omega _{\mathrm{ss}},\mu _{ss})\) vanishes and the solution of \(u^{(j)}(t)\) is \(u^{(j)}(t)=\mathbf{C }_{\mathrm{s}}^{\mathrm {T}}(\tau )\mathbf{q }\) with \(\tau =\omega _{\mathrm{ss}}t-\mu _{\mathrm{ss}}j\). The procedure to calculate steady-state periodic wave solutions by solving the DDE is summarized below:
- 1.
Convert the original wave propagation problem in Eq. (2) to the corresponding DDE in Eq. (5);
- 2.
Normalize the DDE to Eq. (9) by introducing the dimensionless time variable \(\tau =\omega t\);
- 3.
Construct approximated responses \(u=[\mathbf{C }_{\mathrm{s}}^{\mathrm {T}}(\tau )\mathbf{q }]_{\tau =\tau _{n}}\) and their derivatives \(u'=[\mathbf{C }_{\mathrm{s}}^{\mathrm {T}}(\tau )\mathbf{G }\mathbf{q }]_{\tau =\tau _{n}}\) and \(u^{\prime \prime }=[\mathbf{C }_{\mathrm{s}}^{\mathrm {T}}(\tau )\mathbf{G }^{2}\mathbf{q }]_{\tau =\tau _{n}}\) at discrete times \(\left[ \tau _{n}=\frac{2\pi n}{M_{T}}\right] _{n=0,\ldots ,M_{T}-1}\) with guess solutions of \(\mathbf{q }\) and \(\omega \);
- 4.
Construct delay variables \(u_{j}=[\mathbf{C }_{\mathrm{s}}^{\mathrm {T}}(\tau )\mathbf{D }_{j}\mathbf{q }]_{\tau =\tau _{n}}\) at discrete times \(\left[ \tau _{n}=\frac{2\pi n}{M_{T}}\right] _{n=0,\ldots ,M_{T}-1}\) with a guess solution of \(\mu \) in \(T_{j}=\mu j\);
- 5.
Evaluate residuals \([r(\tau ,\mathbf{q },\omega ,\mu )]_{\tau =\tau _{n}}\) in Eq. (16) at discrete times \(\left[ \tau _{n}=\frac{2\pi n}{M_{T}}\right] _{n=0,\ldots ,M_{T}-1}\) by substituting \(u=[\mathbf{C }_{\mathrm{s}}^{\mathrm {T}}(\tau )\mathbf{q }]_{\tau =\tau _{n}}\), \(u'=[\mathbf{C }_{\mathrm{s}}^{\mathrm {T}}(\tau )\mathbf{G }\mathbf{q }]_{\tau =\tau _{n}}\), \(u''=[\mathbf{C }_{\mathrm{s}}^{\mathrm {T}}(\tau )\mathbf{G }^{2}\mathbf{q }]_{\tau =\tau _{n}}\), and \(u_{j}=[\mathbf{C }_{\mathrm{s}}^{\mathrm {T}}(\tau )\mathbf{D }_{j}\mathbf{q }]_{\tau =\tau _{n}}\) into the DDE;
- 6.
Calculate the harmonic balanced residual \(\mathbf{r }(\mathbf{q },\omega ,\mu )\) by calculating Fourier coefficients of \([r(\tau ,\mathbf{q },\omega ,\mu )]_{\tau =\tau _{n}}\)using the FFT;
- 7.
Derive the partial differential functions \(\frac{\partial F}{\partial \omega }\), \(\frac{\partial F}{\partial \mu }\), \(F_{dd}=\frac{\partial F}{\partial u^{\prime \prime }}\), \(F_{d}=\frac{\partial F}{\partial u'}\), and \(F_{j}=\frac{\partial F}{\partial u_{j}}\), evaluate them at discrete times \(\left[ \tau _{n}=\frac{2\pi n}{M_{T}}\right] _{n=0,\ldots ,M_{T}-1}\) in the same way as that in Step 5, and calculate their Fourier coefficients by FFTs;
- 8.
Calculate Jacobian matrices of \(\mathbf{r }(\mathbf{q },\omega ,\mu )\) with respect to \(\omega \) and \(\mu \) by conducting FFTs of \(\frac{\partial F}{\partial \omega }\) and \(\frac{\partial F}{\partial \mu }\), respectively, in the same way as that in Step 6;
- 9.
Construct the Jacobian matrix \(\mathbf{J }_{\mathbf{q }}\) by substituting Toeplitz forms of \(F_{dd}\), \(F_{d}\) and \(F_{j}\) into Eq. (24), where the Toeplitz forms are constructed using their Fourier coefficients from Step 7, as shown in Eq. (23); and
- 10.
Update \(\omega \), \(\mu \) and \(\mathbf{q }\) by the Newton method with use of the residual and Jacobian matrices from Steps 6, 8 and 9 until the Euclidean norm of \(\mathbf{r }(\mathbf{q },\omega ,\mu )\) vanishes at \(\omega =\omega _{\mathrm{ss}}\), \(\mu =\mu _{\mathrm{ss}}\) and \(\mathbf{q }=\mathbf{q }_{\mathrm{ss}}\), and construct the steady-state wave solution as \(u^{(j)}(t)=\mathbf{C }_{\mathrm{s}}^{\mathrm {T}}(\tau )\mathbf{q }\) with \(\tau =\omega _{\mathrm{ss}}t-\mu _{\mathrm{ss}}j\).
The above procedure can be automatically implemented by a computer program and the only manual work is partial differentiation of the DDE, which can be a much easier task than derivation of Jacobian matrices in the classical IHB method.

Schematic of the 1D monatomic chain
3 Examples and results
3.1 1D monatomic chain under the nonlinear Hertzian contact law
In the example of a 1D monatomic chain that was analyzed in [14], as shown in Fig. 1, the nonlinear Hertzian contact law is used to describe interaction of neighboring particles, and the governing equation of a particle is
where
in which \(E=68.9\) GPa is the Young’s modulus, \(R=9.5025\) mm is the radius of the particle sphere, \(m=9.73\) g is the mass of the particle, \(\nu =0.35\) is the Poisson’s ratio, and \(\delta _{0}=0.0031\) mm is the compressive deformation of two adjacent particles due to a static force \(F_{0}=20\) N acting on two ends of the chain.
For given \(\omega \) and \(\mu \), the steady-state solution of \(u^{(j)}\) is \(u^{(j)}=U(\omega t-T_{j})\). Assuming \(j=0\) for the current particle, one has
Delayed variables \(u^{(-1)}\) and \(u^{(1)}\) are
with \(T_{-1}=-\mu \) and \(T_{1}=\mu \), respectively.
The dimensionless time variable is \(\tau =\omega t\). With the time variable transformation, the original equation in Eq. (25) is converted to
where
Fourier series approximations of \(u(\tau )\) and its derivatives and delayed variables are
Substituting the above approximated variables with a guess solution of \(\mathbf{q }\) into Eq. (26) yields the residual
where
The harmonic balanced residual \(\mathbf{r }(\mathbf{q },\omega ,\mu )\) can be directly calculated by the FFT of \(\left[ r(\tau _{n},\mathbf{q },\omega ,\mu )\right] _{n=0,\ldots ,M_{T}-1}\) at discrete times \(\left[ \tau _{n}=\frac{2\pi n}{M_{T}}\right] _{n=0,\ldots ,M_{T}-1}\).
In the guessed \(\mathbf{q }=\left[ a_{0}\ a_{1}\ \cdots a_{M}\ b_{1}\ \cdots b_{M}\right] ^{\mathrm {T}}\), \(a_{0}=0\) is known and \(a_{1}=A\) can be a preset constant. In this case, the average of \(r(\tau ,\mathbf{q },\omega ,\mu )\) is also zero, which indicates that the first component of \(\mathbf{r }(\mathbf{q },\omega ,\mu )\) is zero. For the other two variables \(\omega \) and \(\mu \), \(\mu \) is assumed to be known in every calculation, and \(\omega \) and rest components of \(\mathbf{q }\) are to be found to make rest components of \(\mathbf{r }(\mathbf{q },\omega ,\mu )\) vanish. Thus, the new unknown variable set is
The Jacobian matrix \(\mathbf{J }_{\omega }\) can be calculated by the FFT of \(\frac{\partial r}{\partial \omega }=2\omega \mathbf{C }_{\mathrm{s}}^{\mathrm {T}}\mathbf{G }^{2}\mathbf{q }\). To obtain the Jacobian matrix \(\mathbf{J }_{\mathbf{q }}\), the following partial derivatives of Eq. (26) are first obtained:
Fourier coefficients of the above partial derivatives can be calculated by the FFT and their Toeplitz forms can be constructed, which are denoted by \(\mathbf{f }_{dd,T}\), \(\mathbf{f }_{d,T}\), \(\mathbf{f }_{0,T}\), \(\mathbf{f }_{-1,T}\) and \(\mathbf{f }_{1,T}\), respectively. Note that the partial derivative in Eq. (32) is constant and its Toeplitz form is a diagonal matrix with \(\omega ^{2}\) as diagonal components; the Toeplitz form of \(\frac{\partial F}{\partial u'}\) in Eq. (33) is zero. Finally, the Jacobian matrix \(\mathbf{J }_{\mathbf{q }}\) can be calculated by the formula in Eq. (24). There are two steps to construct the Jacobian matrix of \(\mathbf{r }(\mathbf{q },\omega ,\mu )\) with respect to the new variable \(\mathbf{x }\): first, the second column in \(\mathbf{J }_{\mathbf{q }}\) is replaced by \(\mathbf{J }_{\omega }\) since \(a_{1}\) in \(\mathbf{x }\) is replaced by \(\omega \), and second, the first row and column of \(\mathbf{J }_{\mathbf{q }}\) are removed since the first components of \(\mathbf{r }(\mathbf{q },\omega ,\mu )\) and \(\mathbf{q }\) are zero, respectively.

Dispersion of the 1D monatomic chain calculated by the proposed method with \(M=3,\ 7,\ 13\) and \(A=0.1\delta _{0}\)
Based on the algorithm described above, solutions of \(\mathbf{q }\) and \(\omega \) can be calculated by the Newton method, which are denoted by \(\mathbf{q }_{\mathrm {ss}}\) and \(\omega _{\mathrm{ss}}\), respectively. Thus, the steady-state solution of the \(j-\)th particle is \(u^{(j)}=u_{\mathrm {ss}}(\tau )=\mathbf{C }_{\mathrm{s}}^{\mathrm {T}}\mathbf{q }_{\mathrm {ss}}\) with \(\tau =\omega t-\mu j\). For performance analysis of this method, influence of the order of the Fourier series M is first studied. The frequency \(f=\frac{\omega }{2\pi }\) is calculated for each \(\mu \) that varies from zero to \(\pi \) when \(A=0.1\delta _{0}\), and their relationship is plotted in Fig. 2. Different values of \(M=3,\ 7,\ 13\) are used in the algorithm, and the plot shows that their results are almost the same due to weak nonlinearity of the chain. When strong nonlinearity \(A=0.9\delta _{0}\) is applied at \(\mu =0.6\), the value \(f=3.0338\) that is calculated with \(M=3\) is different from values \(f=3.0406\) that are calculated with both \(M=7\ \mathrm {and}\ 13\). When nonlinearity is stronger with \(A=1.5\delta _{0}\) and \(\mu =0.6\), differences between \(f=3.1216\) with \(M=3\) and \(f=3.1504\) with \(M=7\ \mathrm {and}\ 13\) become larger. Thus, \(M=13\) is used in the following calculation for guaranteed convergence. Dispersion of the monatomic chain is calculated, as shown in Fig. 3. The results with nonlinearities \(A=0.1\delta _{0},\ 0.5\delta _{0},\ 0.9\delta _{0}\) are the same as those in [14]; dispersion with \(A=1.5\delta _{0}\) is also plotted in Fig. 3, which is not shown in [14]. Differences among f with \(A=1.5\delta _{0}\) and different values \(M=3,\ 7,\ 13\) at \(\mu \) that varies from 0.3 to 3.14 are shown in Table 1. It can be seen that accuracy of f with \(M=3\) at small \(\mu \) is worse than that at large \(\mu \), since more harmonics are involved in periodic responses of a particle at smaller \(\mu ,\) as shown in Fig. 4. The steady-state longitudinal wave pattern of the 1D monatomic chain at a time instant with \(A=1.5\delta _{0}\) and \(\mu =0.3\) is shown in Fig. 5.

Relationship between \(\omega \) and \(\mu \) for the 1D monatomic chain with \(M=13\) and \(A=0.1\delta _{0},\ 0.5\delta _{0},\ 0.9\delta _{0},\ 1.5\delta _{0}\)

Periodic responses of a particle with dimensionless time that are calculated with \(M=13\) and \(A=1.5\delta _{0}\)

Steady-state longitudinal wave pattern of the 1D monatomic chain with \(A=1.5\delta _{0}\) and \(\mu =0.3\)
3.2 1D monatomic chain with cubic springs
In another example of a 1D monatomic chain that was studied in [8], a cubic spring is used to describe interaction between two adjacent particles, as shown in Fig. 6. The governing equation of the system in [8] is shown here for subsequent dispersion analysis using the new methodology:

1D monatomic chain with cubic springs
where \({\bar{\omega }}=\omega /\omega _{n}\), which is the ratio of the angular frequency \(\omega \) and the linear natural frequency \(\omega _{n}\), \(\tau =\omega t\), and \({\bar{\Gamma }}\) is a parameter that describes the scale of nonlinearity. Conversion from the wave propagation problem to a DDE is similar to that of the previous example. The steady-state solution is \(u^{(j)}=U(\tau -T_{j})\); the index of the current particle can be \(j=0\), so that \(u^{(j)}\), \(u^{(j-1)}\), and \(u^{(j+1)}\) are replaced by \(u^{(0)}=u(\tau )=U(\tau )\), \(u^{(-1)}=u_{-1}(\tau )=U(\tau -T_{-1})\), and \(u^{(1)}=u_{1}(\tau )=U(\tau -T_{1})\), respectively, with \(-T_{-1}=T_{1}\) equal to the wave number \(\mu \). Thus, the converted DDE is
By using the same approximations of \(u(\tau )\) and its derivatives and delayed variables as those in Eqs. (27)–(31), the residual with a guess solution \(\mathbf{q }=\left[ a_{0}\ a_{1}\ \cdots a_{M}\ b_{1}\ \cdots b_{M}\right] ^{\mathrm {T}}\) is
The harmonic balanced residual \(\mathbf{r }(\mathbf{q },{\bar{\omega }},\mu )\) can be calculated by the FFT, and the Jacobian matrix can be constructed by the same procedure as that in the previous example with use of the following new partial derivatives:
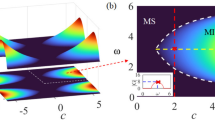
Relationships of \({\bar{\omega }}\) and \(\mu \) for different values of \({\bar{\Gamma }}\) are shown in Fig. 7. When \({\bar{\Gamma }}=0\), the corresponding curve represents the relationship for a system with linear springs. A positive \({\bar{\Gamma }}\) indicates a hardening-spring system and the corresponding frequency is larger than that for the linear-spring system; a negative \({\bar{\Gamma }}\) indicates a softening-spring system and the corresponding frequency is smaller than that for the linear-spring system. The results are consistent with those in [8].

Dispersion of the 1D monatomic chain with cubic springs with \({\bar{\Gamma }}=1,-1,0\)
4 Conclusion
A new methodology is formulated to convert a 1D nonlinear wave propagation equation to a DDE with multiple time delays and advances, and the steady-state periodic response of the wave propagation problem is equivalent to that of the DDE. A modified IHB method is used to calculate the steady-state response of an autonomous nonlinear DDE with both time delays and advances, and monatomic 1D chains under the nonlinear Hertzian contact law and with nonlinear springs are used as examples to illustrate this methodology, whose results well match those in previous works. With use of the IHB method, one can efficiently obtain an arbitrarily accurate solution by choosing the order of the Fourier series. This methodology is applicable for wave propagation problems with general nonlinearities and can be automatically implemented by a unified computer program for different problems. It can be extended to solve wave propagation problems of more complex phononic structures.
References
Graff, K.F.: Wave Motion in Elastic Solids. Courier Corporation, Chelmsford (2012)
Hussein, M.I., Leamy, M.J., Ruzzene, M.: Dynamics of phononic materials and structures: historical origins, recent progress, and future outlook. Appl. Mech. Rev. 66(4), 040802 (2014)
Wang, K., Liu, Y., Yang, Q.: Tuning of band structures in porous phononic crystals by grading design of cells. Ultrasonics 61, 25–32 (2015)
Ganesh, R., Gonella, S.: From modal mixing to tunable functional switches in nonlinear phononic crystals. Phys. Rev. Lett. 114(5), 054302 (2015)
Vakakis, A.F., King, M.E., Pearlstein, A.: Forced localization in a periodic chain of non-linear oscillators. Int. J. Non-Linear Mech. 29(3), 429–447 (1994)
Vakakis, A.F., King, M.E.: Nonlinear wave transmission in a monocoupled elastic periodic system. J. Acoust. Soc. Am. 98(3), 1534–1546 (1995)
Sreelatha, K., Joseph, K.B.: Wave propagation through a 2D lattice. Chaos Solitons Fractals 11(5), 711–719 (2000)
Narisetti, R.K., Leamy, M.J., Ruzzene, M.: A perturbation approach for predicting wave propagation in one-dimensional nonlinear periodic structures. J. Vib. Acoust. 132(3), 031001 (2010)
Narisetti, R.K., Ruzzene, M., Leamy, M.J.: A perturbation approach for analyzing dispersion and group velocities in two-dimensional nonlinear periodic lattices. J. Vib. Acoust. 133(6), 061020 (2011)
Manktelow, K., Leamy, M.J., Ruzzene, M.: Comparison of asymptotic and transfer matrix approaches for evaluating intensity-dependent dispersion in nonlinear photonic and phononic crystals. Wave Motion 50(3), 494–508 (2013)
Packo, P., Uhl, T., Staszewski, W.J., Leamy, M.J.: Amplitude-dependent Lamb wave dispersion in nonlinear plates. J. Acoust. Soc. Am. 140(2), 1319–1331 (2016)
Autrusson, T.B., Sabra, K.G., Leamy, M.J.: Reflection of compressional and Rayleigh waves on the edges of an elastic plate with quadratic nonlinearity. J. Acoust. Soc. Am. 131(3), 1928–1937 (2012)
Wang, J., Zhou, W., Huang, Y., Lyu, C., Chen, W., Zhu, W.: Controllable wave propagation in a weakly nonlinear monoatomic lattice chain with nonlocal interaction and active control. Appl. Math. Mech. 39(8), 1059–1070 (2018)
Narisetti, R.K., Ruzzene, M., Leamy, M.J.: Study of wave propagation in strongly nonlinear periodic lattices using a harmonic balance approach. Wave Motion 49(2), 394–410 (2012)
Frandsen, N.M., Jensen, J.S.: Modal interaction and higher harmonic generation in a weakly nonlinear, periodic mass-spring chain. Wave Motion 68, 149–161 (2017)
Lazarov, B.S., Jensen, J.S.: Low-frequency band gaps in chains with attached non-linear oscillators. Int. J. Non-Linear Mech. 42(10), 1186–1193 (2007)
Duan, W.S., Shi, Y.R., Zhang, L., Lin, M.M., Lv, K.P.: Coupled nonlinear waves in two-dimensional lattice. Chaos Solitons Fractals 23(3), 957–962 (2005)
Wang, X., Zhu, W., Zhao, X.: An incremental harmonic balance method with a general formula of Jacobian matrix and a direct construction method in stability analysis of periodic responses of general nonlinear delay differential equations. J. Appl. Mech. 86(6), 061011 (2019)
Zang, H., Zhang, T., Zhang, Y.: Stability and bifurcation analysis of delay coupled Van der Pol–Duffing oscillators. Nonlinear Dyn. 75(1–2), 35–47 (2014)
Molnar, T.G., Insperger, T., Stepan, G.: Analytical estimations of limit cycle amplitude for delay-differential equations. Electron. J. Qual. Theory Differ. Equ. 2016(77), 1–10 (2016)
Gilsinn, D.E.: Estimating critical Hopf bifurcation parameters for a second-order delay differential equation with application to machine tool chatter. Nonlinear Dyn. 30(2), 103–154 (2002)
Dadi, Z., Afsharnezhad, Z., Pariz, N.: Stability and bifurcation analysis in the delay-coupled nonlinear oscillators. Nonlinear Dyn. 70(1), 155–169 (2012)
Deshmukh, V., Butcher, E.A., Bueler, E.: Dimensional reduction of nonlinear delay differential equations with periodic coefficients using Chebyshev spectral collocation. Nonlinear Dyn. 52(1), 137–149 (2008)
Butcher, E.A., Bobrenkov, O.A.: On the Chebyshev spectral continuous time approximation for constant and periodic delay differential equations. Commun. Nonlinear Sci. Numer. Simul. 16(3), 1541–1554 (2011)
Insperger, T., Stepan, G.: Semi-discretization method for delayed systems. Int. J. Numer. Methods Eng. 55(5), 503–518 (2002)
Bayly, P., Halley, J., Mann, B.P., Davies, M.: Stability of interrupted cutting by temporal finite element analysis. J. Manuf. Sci. Eng. 125(2), 220–225 (2003)
Mitra, R., Banik, A., Chatterjee, S.: Dynamic stability of time-delayed feedback control system by FFT based IHB method. WSEAS Trans. Appl. Theor. Mech 4(8), 292–303 (2013)
Wang, X., Zhu, W.: A modified incremental harmonic balance method based on the fast Fourier transform and Broyden’s method. Nonlinear Dyn. 81(1–2), 981–989 (2015)
Wang, X., Zhu, W.: Dynamic analysis of an automotive belt-drive system with a noncircular sprocket by a modified incremental harmonic balance method. J. Vib. Acoust. 139(1), 011009 (2017)
Wang, X., Zhu, W.: A new spatial and temporal harmonic balance method for obtaining periodic steady-state responses of a one-dimensional second-order continuous system. J. Appl. Mech. 84(1), 014501 (2017)
Acknowledgements
The authors would like to thank the support from the National Science Foundation of China under Grant No. 11772100.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declared no potential conflict of interest with respect to the research, authorship, and publication of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Wang, X., Zhu, W. & Liu, M. Steady-state periodic solutions of the nonlinear wave propagation problem of a one-dimensional lattice using a new methodology with an incremental harmonic balance method that handles time delays. Nonlinear Dyn 100, 1457–1467 (2020). https://doi.org/10.1007/s11071-020-05535-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-020-05535-4