
Abstract
Fractional partial differential equations have many applications in science and engineering. However, not only the analytical solution existed for a limited number of cases, but also the numerical methods are very complicated and difficult. The aim of this paper is to present an efficient wavelet operational method based on the second Chebyshev wavelet to solve the fractional partial differential equations. We derived the convergence of the two-dimensional second Chebyshev wavelet and give the second Chebyshev wavelet operational matrix of fractional integration. Then we present a computational method based on the above results for solving a class of fractional partial differential equations. The initial equations are transformed into a Sylvester equation. Some numerical examples are given to demonstrate the simplicity, clarity and powerfulness of the new method.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Most of the scientific problems and phenomena arise nonlinearly in various fields of mathematical physics and applied sciences, such as fluid mechanics [1, 2], plasma physics [3, 4], fluid physics [5], solid-state physics [6] and geochemistry. The investigation of traveling wave solutions of the evolution equations plays a significant role to look into the internal mechanism of physical phenomena [7]. In recent years, the use of fractional calculus of modeling physical systems has been widely considered [8,9,10,11]. For example, the nonlinear oscillation of earthquake can be modeled with fractional derivatives, and the fluid-dynamic traffic model with fractional derivatives can eliminate the deficiency arising from the assumption of continuum traffic flow. A lot of researches have shown the advantageous use of the fractional calculus in the modeling and control of dynamical systems [12, 13]. Fractional differential equations are generalized from integer order ones, which are obtained by replacing integer order derivatives by fractional ones [14]. Recently, considerable interest in fractional differential equations has been stimulated due to their numerous applications in different fields.
The utility of fractional partial differential equations (PDEs) in mathematical modeling has attracted many attention in recent years. However, a small number of algorithms for the numerical solution of fractional partial differential equations have been suggested. These methods include finite difference method [15], homotopy analysis method [16], generalized differential transform method [17], homotopy perturbation method [18], Jacobi tau approximation method [19], variational iteration method [20], orthogonal polynomials method [21] and spectral method [22].
Some of the above methods are based on the approximation of the two definitions of fractional derivatives: the Caputo definition and the Riemann–Liouville definition [14]. They are complicated and time consuming. Wavelet method has been applied for solving partial differential equations from the beginning of 1990s. The construction and application of wavelet numerical method have typically focused on the selection of different wavelets and the derivation of wavelet-based discrete forms [23,24,25,26,27]. Using wavelet numerical method has several advantages: (1) The main advantage is that after discreting the coefficient matrix of algebraic equation is spare. (2) The wavelet method is computer oriented; thus, solving higher order equation becomes a matter of dimension increasing. (3) The solution is a multi-resolution type. (4) The solution is convergence, even the size of increment may be large. Therefore, in the last two decades the wavelet method has been applied for solving partial differential equations [28,29,30,31,32]. The second Chebyshev wavelet which is constructed by us has been used to approximate the solutions the fractional differential equations [33], fractional integro-differential equations [23, 24, 34] and weakly singular Volterra integral equations [35] as a more efficient and accurate method.
In this paper, we propose the second Chebyshev wavelet operational matrix method to solve the fractional partial differential equations. Consider the following fractional partial differential equations
subject to
where \(\frac{\partial ^{\alpha }u}{\partial {x^{\alpha }}}\) and \(\frac{\partial ^{\beta }u}{\partial {t^{\beta }}}\) are fractional derivative of Caputo sense, \(f,\varphi _1,\varphi _2,\theta _1,\theta _2\) are the known continuous functions, u(x, t) is the unknown function, \(0<\alpha , \beta \le 1\).
The outline of this article is as follows: In Sect. 2, we introduce some necessary definitions and mathematical preliminaries of fractional calculus. In Sect. 2, we give the second Chebyshev wavelet operational matrix of fractional integration. In Sect. 4, the convergence of the two-dimensional second Chebyshev wavelet for expansion two variable continuous function is investigated. In Sect. 5, we summarize the application of the second Chebyshev wavelet operational matrix method to the solution of fractional-order partial differential equations. In Sect. 6, we provide several examples to show the efficiency and simplicity of the method. Concluding remarks are given in the last section.
2 Preliminaries and notations
We first review some basic definitions of fractional calculus, which are required for establishing our results [14].
Definition 1
A real function \(f(t), t>0,\) is said to be in the space \(C_\nu , \nu \in R\) if there exists a real number \(k ~(k>\nu ),\) such that \(f(t)=t^k f_1(t)\), where \(f_1(t)\in C[0,\infty )\), and it is said to be in the space \(C^m_\nu \) iff \(f^{(m)}\in C_{\nu }, m\in N\).
Definition 2
The Riemann–Liouville fractional integral operator \(I^{\alpha }\) of order \(\alpha \), of a function \(f\in C_{\nu }, \nu \ge -1\) , is defined as:
Definition 3
The fractional derivative of f(t) in the Caputo sense is defined as:
where \(x>0, f \in C^m_{-1}\).
For the Caputo derivative, we have: if \(m-1<\alpha \le m, m\in N\) and \(f\in C^m_{\nu }, \nu \ge -1\), then
and
For more details on the mathematical properties of fractional derivatives and integrals, see [14].
3 The second Chebyshev wavelet and operational matrix of the fractional integration
3.1 The construction of the second Chebyshev wavelet
The second Chebyshev wavelet which defined on the interval [0, 1) has the following form [36]:
where \(n=1,\ldots ,2^{k-1}\) and k is any positive integer, and
here the coefficient \(\sqrt{2/\pi }\) is used for orthonormality; \({U}_{m}(t)\) is the second Chebyshev polynomials of degree m with respect to the weight function \(\omega (t)=\sqrt{1-t^2}\). They are defined on the interval \([-1,1]\) by the recurrence:
The weight function \(\tilde{\omega }(t)=\omega (2t-1)\) has to be dilated and translated as \( \omega _n(t)=\omega (2^kt-2n+1). \)
The second Chebyshev wavelet forms an orthonormal basis for \(L^2_{\omega _n}[0,1)\), i.e.,
where \((\cdot ~,~\cdot )\) denotes the inner product in \(L^2_{\omega _n}[0,1]\). The second Chebyshev wavelet has compact support \([(n-1)/2^{k-1}, n/2^{k-1}],~n=1,\ldots ,2^{k-1}\).
3.2 Function approximation
A function f(t) defined over [0,1] may be expressed in terms of the second Chebyshev wavelet as
where the coefficients \( c_{nm}\) are given by
We can approximate the function f(t) by the truncated series
where the coefficient vector C and the second Chebyshev wavelet function vector \(\varPsi (t)\) are \(m'=2^{k-1}M\) column vectors.
For simplicity, Eq. (7) can be written as:
where \(c_i=c_{nm},~\psi _{i}(t)=\psi _{nm}(t)\).
The index i can be determined by the relation \(i=M(n-1)+m+1\); thus, we have:
Taking the collocation points as following
we define the second Chebyshev wavelet matrix \(\varPhi _{m'\times m'}\) as
where \(m'=2^{k-1}M\). For example, when \(M=3\) and \(k=2\), the second Chebyshev wavelet matrix is expressed as
In the same way, a function \(u(x,t)\in L^2_{\omega _n}([0,1]\times \ [0,1])\) can be also approximated as
paginationpagebreak
where U is \(m'\times m'\) matrix with \(u_{ij}=(\psi _i(x),(u(x,t),\) \(\psi _j(t))).\) We use the wavelet collocation method to determine the coefficients \(u_{ij}\). Taking collocation points as Eq. (10), we obtain the matrix form of Eq. (11)
where \(U=[u_{ij}]_{m'\times m'}, K=[u(x_i,t_j)]_{m'\times m'}\).
3.3 Operational matrix of the fractional integration
The second Chebyshev wavelet operational matrix of the fractional integration has been derived in [23, 24]; here, we simply introduce it.
Let \(I^{\alpha }\) is fractional integration operator of the second Chebyshev wavelet; we can obtain
where matrix \(P_{{m'}\times {m'}}^{\alpha }\) is called the second Chebyshev wavelet operational matrix of fractional integration.
From [23, 24, 37], the matrix \( P_{{m'}\times {m'}}^{\alpha }\) is given by
where
and
For example, when \(\alpha =1/2,~m'=6\) the operational matrix of fractional integration has the following form
4 Convergence of the two-dimensional second Chebyshev wavelet
In this section, we investigate the convergence of the two-dimensional second Chebyshev wavelet for expansion a two variable continuous function.
Theorem 4.1
If the series \(\sum _{i=0}^{\infty }\sum _{j=0}^{\infty }u_{ij}\psi _i(x)\psi _j(y) \) converge to u(x, y) on the square \([0,1)\times [0,1)\), then we have
Proof
The proof is straightforward. \(\square \)
Theorem 4.2
If the sum of the abstract value of the second Chebyshev wavelet coefficients of a continuous function u(x, y) form a convergent series, then the second Chebyshev wavelet expansion is absolutely uniformly convergent, and convergent to the function u(x, y).
Proof
The proof is straightforward. \(\square \)
Theorem 4.3
If a continuous function \(u(x,y)\in L^2([0,1)\times [0,1))\) has bounded mixed fourth partial derivative \(\frac{\partial ^4 u(x,y)}{\partial x^2 \partial y^2}\), then the second Chebyshev wavelet expansion of the function converges uniformly to the function.
Proof
Let u(x, y) be a function defined on \([0,1)\times [0,1)\) and \(\left| \frac{\partial ^4 u(x,y)}{\partial x^2 \partial y^2}\right| \le \tilde{M}\), where \(\tilde{M}\) is a positive constant. \(\square \)
The second Chebyshev wavelet coefficients of continuous function u(x, y) are defined as
where \(i=M(n_1-1)+m_1+1, j=M(n_2-1)+m_2+1\).
Now, let \(2^{k_1}x-2n_1+1=t\) and then
By letting \(t=\cos \theta _1\) and the definition of the second Chebyshev wavelet, it follows
Using the integration by parts, we have
A simple computation shows that [38]
Similar analysis in [38], we also get
Therefore,
This means that the series \(\sum _{i=0}^{\infty }\sum _{j=0}^{\infty }u_{ij}\) is absolutely convergence and the previous theorem results that the expansion of the u(x, y) converges uniformly.
5 Applications of the operational matrix of fractional integration
Consider the fractional-order partial differential equations
subject to
Let \(\frac{\partial ^{2}{u}}{\partial {x}\partial {t}}\approx \varPsi ^\mathrm {T}(x)U\varPsi (t)\), and then, we have

The approximate solution of Example 1 for \(k=2\)

The approximate solution of Example 1 for \(k=3\)

The approximate solution of Example 1 for \(k=4\)

The approximate solution of Example 1 for \(k=5\)

The exact solution for Example 1
Therefore,
Then we can get
and
Substituting Eqs. (22) and (23) into (16), we have
where \(g(x,t)=f(x,t)-I^{1-\alpha }\varphi _2(x)-I^{1-\beta }\varphi _1(t)\).
Similarly, g(x, t) can be expressed as follows
where \(G=[g_{ij}]_{m\times n}\).
Dispersing Eqs. (24) and (25) by the points \((x_i,t_j),i\) \(=1,2,\ldots , m'\) and \(j=1,2,\ldots ,m'\), we can obtain
Namely
Equation (27) is a Sylvester equation. We obtain U by solving Eq. (27). Then using Eq. (21), we get the numerical solution of u(x, t).
6 Applications and results
To test the efficiency and accuracy of our method, we consider three examples [24, 39].
Example 1
Consider the following fractional partial differential equations
subject to \(u(0,t)=u(x,0)=0,~f(x,t)=\frac{9x^{2}t^{5/3}}{5\varGamma (2/3)}+\frac{8x^{3/2}t^{2}}{3\varGamma (1/2)}.\) The exact solution is \(x^2t^2\). The numerical results for \(k=2, 3,4,5\) and \(M=2\) are shown in Figs. 1, 2, 3 and 4. The exact solution is shown in Fig. 5. The numerical solutions and the exact solution for \(x=1/4,~k=5\) are shown in Fig. 6. From these figures, we can see clearly that numerical solutions are in very good agreement with exact solution.
Example 2
Consider the following equations
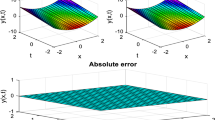
such that \(\frac{\partial {u}}{\partial {t}}\Big |_{x=0}=2t,~\frac{\partial {u}}{\partial {x}}\Big |_{t=0}=2x,~ u(0,t)=t^2+1,~u(x,0)=x^2+1\), and \(f(x,t)=\frac{\varGamma (3)x^{2-\alpha }(t^2+1)}{\varGamma (3-\alpha )}+\frac{\varGamma (3)(x^2+1)t^{2-\beta }}{\varGamma (3-\beta )}\) , the exact solution is \((x^2+1)(t^2+1)\).

Comparison of numerical solutions and exact solution of Example 1 for \(x=1/4,~k=5\)
Taking \(\alpha =1/2,~\beta =1/3\), we can obtain the absolute errors for different \(m'\) (here \(M=3\) and \(k=2,3,4,5\), respectively) in Table 1. From Table 1, we can find clearly that the absolute errors become more and more small when \(m'\) increases. The numerical results for \(m'=48\) and the exact solution are shown in Figs. 7, 8.
Example 3
Consider the following fractional partial differential equations
subject to \(\frac{\partial {u}}{\partial {t}}\Big |_{x=0}=\cos t,~\frac{\partial {u}}{\partial {x}}\Big |_{t=0}=\cos x,~ u(0,t)=\sin t,~u(x,0)=\sin x\). When \(\alpha =\beta =1\), \(U=0\) is the exact solution of Eq. (27), we can get \(u(x,t)=\sin x+\sin t\), which is the exact solution of initial partial differential equation. Figures 9 and 10 show the numerical solutions for different value of \(\alpha , \beta \), where we choose \(M=2, k=5\).

The approximate solution of Example 2 for \(m'=48\)

The exact solution for Example 2

Numerical solution of \(\alpha =3/4, \beta =2/3\) for Example 3

Numerical solution of \(\alpha =3/5, \beta =1/3\) for Example 3
7 Conclusion
In this work, we have used the second Chebyshev wavelet method to solve a class of fractional partial differential equations by combining the operational matrix of fractional integration. We transform the fractional partial differential equations into a Sylvester equation that can be solved easily.
The characteristics of the wavelets basis which lead to a sparse matrix representation are that: (1) the basis functions are orthogonal to low-order polynomials (have vanishing moments), and (2) most basis functions have small intervals of support. Hence, the method in this paper is easy implementation. The achieved results are compared with exact solution, which shows that numerical solutions are in very good coincidence with the exact solution.
References
Gao, X.Y.: Bäcklund transformation and shock-wave-type solutions for a generalized (3+1)-dimensional variable-coefficient B-type Kadomtsev-Petviashvili equation in fluid mechanics. Ocean Eng. 96, 245–247 (2015)
Gao, X.Y.: Incompressible-fluid symbolic computation and Bäcklund transformation: (3+1)-dimensional variable-coefficient Boiti–Leon–Manna-Pempinelli model. Z. Naturforsch. A 70(1), 59–61 (2015)
Zhen, H.L., Tian, B., Wang, Y.F., et al.: Soliton solutions and chaotic motions of the Zakharov equations for the Langmuir wave in the plasma. Phys. Plasm. 22(3), 032307 (2015)
Gao, X.Y.: Variety of the cosmic plasmas: general variable-coefficient Korteweg-de Vries–Burgers equation with experimental/observational support. EPL 110(1), 15002 (2015)
Gao, X.Y.: Comment on ”Solitons, Bäcklund transformation, and Lax pair for the (2+1)-dimensional Boiti-Leon-Pempinelli equation for the water waves” [J. Math. Phys. 51, 093519 (2010)]. J. Math. Phys. 56(1), 014101 (2015)
Gao, F., He, Q., Cao, R., et al.: Enhanced thermoelectric properties of the hole-doped \(Bi_{2-x}K_{x}Sr_{2} Co_{2} O_{y}\) ceramics. Int. J. Mod. Phys. B 29(28), 1550192 (2015)
Sun, W.R., Tian, B., Liu, D.Y., et al.: Nonautonomous matter-wave solitons in a Bose–Einstein condensate with an external potential. J. Phys. Soc. Jpn. 84(7), 074003 (2015)
Frederico, G.S.F., Torres, D.F.M.: Fractional conservation law in optimal control theory. Nonlinear Dynam. 53(3), 215–222 (2008)
Almedia, P., Malinowska, A.B., Torres, D.F.M.: A fractional calculus of variation of multiple integrals with applications to vibrating string. J. Math. Phys. 51(3), 033503 (2010)
El-Nabulsi, R.A., Torres, D.F.M.: Fractional actionlike variational problems. J. Math. Phys. 49(5), 053521 (2008)
Almedia, P., Torres, D.F.M.: Leitwann’s direct method for fractional optimization. Appl. Math. Comput. 217(3), 956–962 (2010)
Calderon, A.J., Vinagre, B.M., Feliu, V.: Fractional order control strategies for power electronic buck converters. Signal Process 86, 2803–2819 (2006)
Tavazoei, M.S., Haeri, M.: Chaos control via a simple fractional-order controller. Phys. Lett. A 372, 798–807 (2008)
Podlubny, I.: Fractional Differential Equations. Academic Press, New York (1999)
Meerschaert, M.M., Tadjeran, C.: Finite difference approximations for two-sided space-fractional partial differential equations. Appl. Numer. Math. 56, 80–90 (2006)
Dehghan, M., Manafian, J., Saadatmandi, A.: Solving nonlinear fractional partial differential equations using the homotopy analysis method. Numer. Methods Partial Differ. Equ. 26(2), 448–479 (2010)
Odibat, Z., Momani, S.: A generalized differential transform method for linear partial differential equations of fractional order. Appl. Math. Lett. 21, 194–199 (2008)
Momani, S., Odibat, Z.: Homotopy perturbation method for nonlinear partial differential equations of fractional order. Phys. Lett. A 365(5), 345–350 (2007)
Bhrawy, A.H., Zaky, M.A.: A method based on the Jacobi tau approximation for solving multi-term timeCspace fractional partial differential equations. J. Comput. Phys. 281, 876–895 (2015)
Elsaid, A.: The variational iteration method for solving Riesz fractional partial differential equations. Comput. Math. Appl. 60, 1940–1947 (2010)
Khalil, H., Khan, R.A.: A new method based on Legendre polynomials for solutions of the fractional two-dimensional heat conduction equation. Comput. Math. Appl. 67, 1938–1953 (2014)
Bhrawy, A.H., Zaky, M.A., Baleanu, D.: New numerical approximations for space-time fractional Burgers’ equations via a Legendre spectral-collocation method. Rom. Rep. Phys. 67(2), 1–13 (2015)
Zhu, L., Fan, Q.B.: Solving fractional nonlinear Fredholm integro-differential equations by the second kind Chebyshev wavelet. Commun. Nonlinear Sci. Numer. Simul. 17, 2333–2341 (2012)
Zhu, L., Fan, Q.B.: Numerical solution of nonlinear fractional-order Volterra integro-differential equations by SCW. Commun. Nonlinear Sci. Numer. Simul. 18, 1203–1213 (2013)
Wang, L.F., Ma, Y.P., Meng, Z.J.: Haar wavelet method for solving fractional partial differential equations numerically. Appl. Math. Comput. 227, 66–76 (2014)
Heydari, M.H., Hooshmandasl, M.R., Ghaini, F.M.: A new approach of the Chebyshev wavelets method for partial differential equations with boundary conditions of the telegraph type. Appl. Math. Model. 38, 1597–1606 (2014)
Saeedi, H., Moghadam, M.M., Mollahasani, N., Chuev, G.N.: A CAS wavelet method for solving nonlinear Fredholm integro-differential equations of fractional order. Commun. Nonlinear Sci. Numer. Simul. 16, 1154–1163 (2011)
Hariharan, G., Kannan, K., Sharma, K.R.: Haar wavelet method for solving Fishers equation. Appl. Math. Comput. 211, 284–292 (2009)
Majak, J., Pohlak, M., Eerme, M., Lepikult, T.: Weak formulation based Haar wavelet method for solving differential equations. Appl. Math. Comput. 211, 488–494 (2009)
Aziz, I., Šarler, B.: Wavelets collocation methods for the numerical solution of elliptic BV problems. Appl. Math. Modell. 37, 676–694 (2013)
Heydari, M.H., Hooshmandasl, M.R., Ghaini, F.M., Fereidouni, F.: Two-dimensional Legendre wavelets for solving fractional poisson equation with Dirichlet boundary conditions. Eng. Anal. Bound. Elem. 37, 1331–1338 (2013)
Heydari, M.H., Hooshmandasl, M.R., Mohammadi, F.: Legendre wavelets method for solving fractional partial differential equations with Dirichlet boundary conditions. Appl. Math. Comput. 234, 267–276 (2014)
Wang, Y.X., Fan, Q.B.: The second kind Chebyshev wavelet method for solving fractional differential equation. Appl. Math. Comput. 218, 8592–8601 (2012)
Wang, Y.X., Zhu, L.: SCW method for solving the fractional integro-differential equations with a weakly singular kernel. Appl. Math. Comput. 275, 72–80 (2016)
Zhu, L., Wang, Y.X.: Numerical solutions of Volterra integral equation with weakly singular kernel using SCW method. Appl. Math. Comput. 260, 63–70 (2015)
Zhu, L., Wang, Y.X.: SCW operational matrix of integration and its application in the calculus of variations. Int. J. Comput. Math. 90, 2338–2352 (2013)
Kilicman, A.: Kronecker operational matrices for fractional calculus and some applications. Appl. Math. Comput. 187, 250–265 (2007)
Zhou, F.Y., Xu, X.Y.: Numerical solution of the convection diffusion equations by the second kind Chebyshev wavelets. Appl. Math. Comput. 247, 353–367 (2014)
Yi, M.X., Huang, J., Wei, J.X.: Block pulse operational matrix method for solving fractional partial differential equation. Appl. Math. Comput. 221, 121–131 (2013)
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was supported by the Tian Yuan Special Funds of the National Natural Science Foundation of China (Grant No. 11426192), the Project of Education of Zhejiang Province (No. Y201533324) and the K. C. Wong Education Foundation, Hong Kong. The authors are grateful to the editor, the associate editor and the anonymous referees for their constructive and helpful comments.
Rights and permissions
About this article

Cite this article
Zhu, L., Wang, Y. Solving fractional partial differential equations by using the second Chebyshev wavelet operational matrix method. Nonlinear Dyn 89, 1915–1925 (2017). https://doi.org/10.1007/s11071-017-3561-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-017-3561-7