
Abstract
This paper is to propose a new definition of two-dimensional (2D) Wigner distribution (2D-WD) and two-dimensional ambiguity function (2D-AF) associated with two-dimensional nonseparable linear canonical transform (2D-NS-LCT), namely 2D-NLCWD and 2D-NLCAF. This allows for several consequences of the basic properties of the proposed distributions such as the shift properties, the conjugation symmetry property, the marginal properties, the Moyal formula, and the relationships with the two-dimensional short-time Fourier transform (2D-STFT). Furthermore, we point out the usefulness and efficacy of newly defined distributions for detecting two-dimensional linear frequency-modulated (2D-LFM) signals.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The 2D-NS-LCT (also known as two-dimensional free metaplectic transformations) has found many applications in digital signal processing, optical system modeling, and many other areas (Ding and Pei, 2011; Ding et al., 2012; Dong and Galatsanos, 2002; Koç et al., 2010; Liu et al., 2010; Pei and Ding, 2001; Pei and Ding, 2009; Ravi et al., 2018; Rodrigo et al., 2007b; Zhang, 2023; Zhao et al., 2014). The 2D-NS-LCT is also known as generalized of some well-known transforms such as the gyrator transform, the coupling transform, and the homogenous coordinate/affine transform (Pei and Ding, 2001; Rodrigo et al., 2007a), in which the two dimensions are coupled to each other by four additional cross-parameters. With six constraints and ten independent parameters, 2D-NS-LCT is more flexible in applications in optics, and signal processing, especially in image processing (Koç et al., 2010; Pei and Ding, 2001; Ravi et al., 2018). It can be considered to solve some problems that typical one-dimensional transform cannot deal with. The 2D-NS-LCT of a signal f with real parameters \(\mathcal {M}=(A,B,C,D) \left( \textrm{det}(B)\ne 0\right) \) is defined as Koç et al. (2010)
where
and the values of \(k_1, k_2, k_3, p_1, p_2,\) and \(p_3\) are given by
The parameter matrix A, B, C and D are all \(2\times 2\) submatrices and B is invertible:
\(A= \begin{pmatrix} a_{11}&{}a_{12}\\ a_{21}&{}a_{22} \end{pmatrix},\) \( B= \begin{pmatrix} b_{11}&{}b_{12}\\ b_{21}&{}b_{22} \end{pmatrix},\) \( C= \begin{pmatrix} c_{11}&{}c_{12}\\ c_{21}&{}c_{22} \end{pmatrix},\) \( D= \begin{pmatrix} d_{11}&{}d_{12}\\ d_{21}&{}d_{22} \end{pmatrix}. \) In this case the transformation matrix \(\mathcal {M}=(A,B,C,D)\) of the system is defined as
The corresponding parameter matrices must satisfy the constraints
or
where I is a \(2\times 2\) identity matrix. As can be seen, the constraints of (1.3) and (1.4) can be rewritten as
and
respectively.
Let \(k:=(k_1,k_2,k_3), \,p:=(p_1,p_2,p_3),\,k-p:=(k_1-p_1,k_2-p_2,k_3-p_3)\) and
Thus, equation (1.1) becomes
Using (1.3), and (1.7) the reversibility of 2D-NS-LCT can be expressed as follows
In the sequel, let \(\mathcal {M}^{-1}=\left( D^{T},-B^{T},-C^{T},A^{T}\right) \), we call
the inverse transform of \(\mathbb {L}\).
The classical one-dimensional Wigner distribution and ambiguity function (1D-WD, 1D-AF), as well as the one-dimensional Wigner distribution, and ambiguity function associated with the linear canonical transform (1D-WD-LCT, 1D-AF-LCT), are very crucial in optics, signal processing nonstationary signals and the detection of chirp signals. Their properties and diverse applications can be found in several recent publications (Bai et al., 2012; Che et al., 2012; Johnston, 1989; Minh, 2023; Pei and Ding, 2010; Pei and Ding, 2010; Shah and Teali, 2023; Zhang and Lou, 2015; Zhang, 2016; Zhang et al., 2021). The classical 2D-WD and 2D-AF are very conducive to two-dimensional signal processing. Namely, they are used to estimate and detect 2D-linear frequency-modulated (2D-LFM) and can be defined as Pei and Ding (2010)
where the superscript “*” denotes the complex conjugation. In addition, the combinations of 2D-NS-LCT and 2D-WD (2D-AF) can inherit the advantages of 2D-NS-LCT and the excellent characteristics of 2D-WD (2D-AF), which can be found in some recent publications (Teali et al., 2023; Wei and Shen, 2022; Zhang et al., 2023; Zayed, 2019). Naturally, the 2D-WD in the 2D-NS-LCT domain (2D-WDNL) and 2D-AF in the 2D-NS-LCT domain (2D-AFNL) can be deduced directly by substituting the kernels of the two-dimensional Fourier transform by the kernels of 2D-NS-LCT, respectively. They can be defined as follows (Zhang et al., 2023)
Nevertheless, the complete theoretical system and extensions of the 2D-WD (2D-AF) associated 2D-NS-LCT remain unknown, so additional knowledge on them is very welcome. The main contributions of the paper is summarized below:
-
To formulate the novel definition of 2D-NLCWD and 2D-NLCAF. Furthermore, the classical 2D-WD and 2D-AF exist as special cases of the proposed distributions. Therefore, our new distributions fully inherit the advantages of both 2D-NS-LCT and 2D-WD and 2D-AF. More specifically, we also obtain the 2D-WD and 2D-AF associated with the gyrator transform, which promises to have interesting potential applications.
-
To explore the fundamental properties of the proposed distributions, including the shift properties, the conjugation symmetry property, the marginal properties, the Moyal formula, and the relationship with the 2D-STFT.
-
To execute certain graphical simulations for the detection of the single-component and multi-component 2D-LFM signals by using the proposed distributions. More importantly, the 2D-NLCWD and 2D-NLCAF are flexible than 2D-WDNL and 2D-AFNL in detecting 2D-LFM signals since there are three extra parameters.
The rest of the article is organized as follows: Section 2 gives the definition of 2D-NLCWD and 2D-NLCAF. Moreover, a brief review of proposed distributions and some of their special cases are also presented. Section 3 gives some important properties of the proposed distributions such as the shift properties, the conjugation symmetry properties, the marginal properties, the Moyal formula, and the relationship with the 2D-STFT. In Sect. 4, we apply the proposed transform to detect and estimate the single-component and multi-component 2D-LFM signals. Finally, the conclusion is given in Sect. 5.
2 The 2D-NLCWD and 2D-NLCAF
As can be seen, the relationships between 2D-WD, 2D-AF and the 2D-classical convolution can be presented by
where \(*\) is defined as
where \(f, g \in L^2(\mathbb {R}^2).\)
Therefore, this allows us to define the new kind 2D-NLCWD and 2D-NLCAF as
Definition 1
For given set of parameters \(\mathcal {M}=(A,B,C,D)\) the new 2D-NLCWD and 2D-NLCAF of a signal \(f\in L^2(\mathbb {R})\) are defined as
By using (2.3), (2.4), (2.5) and performing the change of variables, we obtain
Due to the notations (1.7), the kernel of 2D-NS-LCT can be rewritten as
Therefore, by simple computations, equations (2.6) and (2.7) become
where \(\mathcal {C}_{k-p}^{\frac{1}{4}}(u,v)=\left[ \mathcal {C}_{k-p}(u,v)\right] ^{\frac{1}{4}}.\)
It is easy to see that the 2D-NLCWD and 2D-NLCAF can not deduced from 2D-WDNL and 2D-AFNL. Moreover, they are modulated and scaling versions of cross-term 2D-WD and cross-term 2D-AF in time and frequency variables, respectively
and
We now consider some special cases of (2.8) and (2.9) as follows
-
By choosing
$$\begin{aligned} \mathcal {M}= \begin{pmatrix} a_{11}&{}0&{}b_{11}&{}0\\ 0&{}a_{22}&{}0&{}b_{22}\\ c_{11}&{}0&{}d_{11}&{}0\\ 0&{}c_{22}&{}0&{}d_{22} \end{pmatrix}, \end{aligned}$$the 2D-NS-LCT reduces to the 2D-separable linear canonical transform (2D-S-LCT). We can mention some well-known of its special cases including the 2D- Fourier transform, the 2D-Fresnel transform, the 2D- fractional Fourier transform, the 2D-chirp transform and the 2D-scaling transform (Pei and Ding, 2001). We thus obtain novel distributions corresponding to 2D-S-LCT.
-
In the case \(k_i=p_i\,(i\in \{1,2,3\}),\, b_{12}=b_{21}\), the 2D-NLCWD and 2D-NLCAF can be considered as special cases of distributions introduced in Wei and Shen (2022), which are given by
$$\begin{aligned} {2D}&\mathcal {W}_f^{\mathcal {M}}\left( x,y,u,v\right) \\&=\frac{1}{4\pi ^2\vert \textrm{det}(B)\vert }\int _{\mathbb {R}^2}f\left( x+\dfrac{\tau }{2}, y +\dfrac{\eta }{2}\right) f^*\left( x-\dfrac{\tau }{2}, y-\dfrac{\eta }{2}\right) \nonumber \\&\textrm{e}^{\frac{i}{\textrm{det}(B)}\left[ (-b_{22}u+b_{12}v)\tau +(b_{21}u-b_{11}v) \eta \right] }\textrm{e}^{\frac{i}{2\textrm{det}(B)}\left[ 2p_1x\tau +p_2(x\eta +y\tau )+2p_3y \eta \right] }\textrm{d}\tau \textrm{d}\eta ,\\ {2D}\mathcal {L}_f^{\mathcal {M}}&(\tau ,\eta ,u,v)\\&=\frac{1}{4\pi ^2\vert \textrm{det}(B)\vert }\int _{\mathbb {R}^2}f\left( x+\dfrac{\tau }{2}, y +\dfrac{\eta }{2}\right) f^*\left( x-\dfrac{\tau }{2}, y-\dfrac{\eta }{2}\right) \nonumber \\&\textrm{e}^{\frac{i}{\textrm{det}(B)}\left[ (-b_{22}u+b_{12}v)x+(b_{21}u-b_{11}v)y\right] } \textrm{e}^{\frac{i}{2\textrm{det}(B)}\left[ 2p_1x\tau +p_2(x\eta +y\tau )+2p_3y\eta \right] }\textrm{d}x\textrm{d}y. \end{aligned}$$ -
By choosing
$$\begin{aligned} \mathcal {M}_{\theta }= \begin{pmatrix} \cos \theta &{}0&{}0&{}\sin \theta \\ 0&{}\cos \theta &{}\sin \theta &{}0\\ 0&{}-\sin \theta &{}\cos \theta &{}0\\ -\sin \theta &{}0&{}0&{}\cos \theta \end{pmatrix}. \end{aligned}$$In such a particular case, 2D-NS-LCT is the gyrator transform, which promises to be a useful tool in holography, image processing, beam characterization, mode transformation, and quantum information (Dong and Galatsanos, 2002; Liu et al., 2010; Pei and Ding, 2009; Rodrigo et al., 2007b). Then, equations (2.8), and (2.9) take the form
$$\begin{aligned}&{2D}\mathcal{L}\mathcal{W}_f^{\mathcal {M}_{\theta }}\left( x,y,u,v\right) = \frac{1}{4\pi ^2\sin ^2\theta }\int _{\mathbb {R}^2}f\left( x+\dfrac{\tau }{2}, y+\dfrac{\eta }{2}\right) \nonumber \\&\quad \times f^*\left( x-\dfrac{\tau }{2}, y-\dfrac{\eta }{2}\right) \textrm{e}^{i(x\eta +y\tau )\cot \theta } \textrm{e}^{-i(u\eta +v\tau )\csc \theta }\textrm{d}\tau \textrm{d}\eta , \end{aligned}$$(2.10)$$\begin{aligned}&{2D}\mathcal{L}\mathcal{A}_f^{\mathcal {M}_{\theta }}(\tau ,\eta ,u,v)= \frac{1}{4\pi ^2\sin ^2\theta }\int _{\mathbb {R}^2}f\left( x+\dfrac{\tau }{2}, y+\dfrac{\eta }{2}\right) \nonumber \\&\quad \times f^*\left( x-\dfrac{\tau }{2}, y-\dfrac{\eta }{2}\right) \textrm{e}^{i(x\eta +y\tau )\cot \theta } \textrm{e}^{-i(uy+vx)\csc \theta }\textrm{d}x\textrm{d}y, \end{aligned}$$(2.11)which are therefore 2D-WD and 2D-AF associated with the gyrator transform. When \(\theta =\dfrac{\pi }{2}\), (2.10) and (2.11) turn to the well- known 2D-WD and 2D-AF (cf. (1.8), (1.9)), respectively.
3 Properties of the 2D-NLCWD and 2D-NLCAF
Properties of the 2D-NLCWD and 2D-NLCAF will be obtained in this section.
-
(1) Conjugation properties
-
(i)
Conjugation-Covarriance Property:
$$\begin{aligned} \left[ {2D}\mathcal{L}\mathcal{W}_f^{\mathcal {M}}\left( x,y,u,v\right) \right] ^*&={2D}\mathcal{L}\mathcal{W}_f^{\overline{\mathcal {M}}}\left( x,y,u,v\right) ,\\ \left[ {2D}\mathcal{L}\mathcal{A}_f^{\mathcal {M}}(\tau ,\eta ,u,v)\right] ^*&={2D}\mathcal{L}\mathcal{A}_f^{\overline{\mathcal {M}}}(-\tau ,-\eta ,-u,-v), \end{aligned}$$where matrix parameter \(\overline{\mathcal {M}}=(D^T,B^T,C^T,A^T).\)
-
(ii)
Symmetry-Conjugation Property: The 2D-NLCWD and 2D-NLCAF of \(\breve{f}(x,y)=f(-x,-y)\) can be expressed as the forms
$$\begin{aligned} {2D}\mathcal{L}\mathcal{W}_{\breve{f}}^{\mathcal {M}}\left( x,y,u,v\right) ={2D}\mathcal{L}\mathcal{W}_f^{\mathcal {M}}\left( -x,-y,-u,-v\right) , \\ {2D}\mathcal{L}\mathcal{A}_{\breve{f}}^{\mathcal {M}}(\tau ,\eta ,u,v)={2D} \mathcal{L}\mathcal{A}_{f}^{\mathcal {M}}(-\tau ,-\eta ,-u,-v). \end{aligned}$$
Proof
We prove \((\textrm{i})\). Using (2.8), we may observe that
Changing the variables \(-\tau =\tau _1, -\eta =\eta _1\) allow us to realize that
Let \(\overline{\mathcal {M}}=(D^T,B^T,C^T,A^T)\), which is defined as
It is easy to see that \(\overline{\mathcal {M}}\) satisfies the relation (1.3). In addition, based on (1.2), (1.5) and (1.6), we obtain
Therefore
Thus, we can achieve the desired relation as follows
Furthermore, from (2.9) and (3.1), we derive
The proof is completed. \(\square \)
-
(2) 2D-NS-LCT marginal property
The 2D-NS-LCT marginal property of the 2D-NLCWD and 2D-NLCAF can be given as follows
Proof
We will just prove (3.2). For (3.3), we proceed in a similar way. With the aid of (2.8), we obtain
Next, considering \(x_1=x+\dfrac{\tau }{2}, y_1=y+\dfrac{\eta }{2},x_2= x-\dfrac{\tau }{2},y_2= y-\dfrac{\eta }{2},\) we get
which yields (3.2). The proof is concluded. \(\square \)
The Moyal formulas of 2D-NLCWD and 2D-NLCAF will be obtained in (3) as follows.
-
(3) Moyal formula
Assume \(b_{11}^2+(b_{12}+b_{21})^2> 0\) and \(b_{22}^2+(b_{12}+b_{21})^2>0\). The Moyal formula of the 2D-NLCWD and 2D-NLCAF of \(f, g\in L^2(\mathbb {R}^2)\) can be presented by
where the usual inner product in \( L^2(\mathbb {R}^2)\) as \(\langle .,.\rangle \), which is given by
Proof
In order to prove (3.4), we start by interpreting the left-hand side of it.
where \(\delta \) denotes the Dirac delta function. Since \(b_{11}^2+(b_{12}+b_{21})^2> 0\) and \(b_{22}^2+(b_{12}+b_{21})^2>0\) then
Making the substitution \(x_1=x+\dfrac{\varepsilon }{2}, y_1= y+\dfrac{\sigma }{2}, x_2=x-\dfrac{\varepsilon }{2}, y_2= y-\dfrac{\sigma }{2}\) implies that
which is the desired result.
The proof of (3.5) will be omitted because its proof is very similar to the proof of (3.4). \(\square \)
For convenience in proving the time-shift property, we denote
-
(4) Time- shift Property
-
(i)
The 2D-NLCWD of \(\overline{f}(x,y)=f(x-x_0,y-y_0)\) is
$$\begin{aligned}&{2D}\mathcal{L}\mathcal{W}_{\overline{f}}^{\mathcal {M}}\left( x,y,u,v\right) \\&\hspace{56.9055pt}=\Omega _1(x,y,u,v)\cdot {2D}\mathcal{L}\mathcal{W}_{f}^{\mathcal {M}} \left( x-x_0,y-y_0,u+\delta _1,v+\delta _2\right) , \end{aligned}$$where
$$\begin{aligned} \left\{ \begin{array}{ll} \delta _1=-\tilde{b}_{11}\left[ (p_1+k_1)x_0+\frac{(p_2+k_2)y_0}{2}\right] -\tilde{b}_{12}\left[ \frac{(p_2+k_2)x_0}{2}+(p_3+k_3)y_0\right] \\ \delta _2=-\tilde{b}_{12}\left[ (p_1+k_1)x_0+\frac{(p_2+k_2)y_0}{2}\right] -\tilde{b}_{22}\left[ \frac{(p_2+k_2)x_0}{2}+(p_3+k_3)y_0\right] , \end{array} \right. \end{aligned}$$and
$$\begin{aligned}&\Omega _1(x,y,u,v)=\mathcal {C}_{k-p}(x_0,y_0)\mathcal {C}_{p-k}(\delta _1,\delta _2)\nonumber \\&\quad \times \textrm{e}^{-\frac{i}{2\textrm{det}(B)}\left\{ [2(k_1-p_1)\delta _1 +(k_2-p_2)\delta _2]u+[(k_2-p_2)\delta _1+2(k_3-p_3)\delta _2]v\right\} }\nonumber \\&\quad \times \textrm{e}^{\frac{i}{2\textrm{det}(B)}\left[ 2(p_1-k_1)x_0x+(p_2-k_2) (xy_0+x_0y)+2(p_3-k_3)yy_0\right] } \nonumber \\&\quad \times \textrm{e}^{\frac{i}{\textrm{det}(B)}(b_{12}-b_{21}) (x_0\delta _2-\delta _1y_0+vx_0-uy_0-\delta _2x+\delta _1y)}. \end{aligned}$$(3.6) -
(ii)
The 2D-NLCAF of \(\overline{f}(x,y)=f(x-x_0,y-y_0)\) is given by
$$\begin{aligned}&{2D}\mathcal{L}\mathcal{A}_{\overline{f}}^{\mathcal {M}}(\tau ,\eta ,u,v)=\Omega _2 (\tau ,\eta ,u,v)\cdot {2D}\mathcal{L}\mathcal{A}_{f}^{\mathcal {M}}(\tau ,\eta ,u+\zeta _1,v+\zeta _2), \end{aligned}$$where
$$\begin{aligned} \left\{ \begin{array}{ll} \zeta _1=-\tilde{b}_{11}\left[ 2(p_1-k_1)x_0+(p_2-k_2)y_0\right] \\ \hspace{5cm}-\tilde{b}_{12}\left[ (p_2-k_2)x_0+2(p_3-k_3)y_0\right] \\ \zeta _2=-\tilde{b}_{12}\left[ 2(p_1-k_1)x_0+(p_2-k_2)y_0\right] \\ \hspace{5cm}-\tilde{b}_{22}\left[ (p_2-k_2)x_0+2(p_3-k_3)y_0\right] , \end{array} \right. \end{aligned}$$and
$$\begin{aligned}&\Omega _2(\tau ,\eta ,u,v)=\mathcal {C}_{k-p}(x_0,y_0)\mathcal {C}_{p-k}^{\frac{1}{4}} (\zeta _1,\zeta _2)\textrm{e}^{\frac{i}{4\textrm{det}(B)}(b_{12}-b_{21}) (\zeta _1\eta -\zeta _2\tau )}\\&\quad \times \textrm{e}^{-\frac{i}{2\textrm{det}(B)}\left\{ \left[ 2b_{22} (u+\zeta _1)-(b_{12}+b_{21})(v+\zeta _2)\right] x_0+\left[ 2b_{11}(v+\zeta _2) -(b_{12}+b_{21})(u+\zeta _1)\right] y_0\right\} }\nonumber \\&\quad \times \textrm{e}^{-\frac{i}{8\textrm{det}(B)}\left\{ [2(k_1-p_1)\zeta _1 +(k_2-p_2)\zeta _2]u+[(k_2-p_2)\zeta _1+2(k_3-p_3)\zeta _2]v\right\} }\\&\quad \times \textrm{e}^{\frac{i}{4\textrm{det}(B)} \left\{ 2(p_1+k_1)x_0\tau +(p_2+k_2)(x_0\eta +y_0\tau )+2(p_3+k_3)y_0\eta \right\} }. \end{aligned}$$
Proof
We prove (i). Due to the notation (1.7), it is easy to verify that
With the help of (3.7), we deduce
where
Finding \(\delta _1,\delta _2\) satisfy
which gives us
Due to the formulas (2.8),(3.7) and (3.8), we can be recast as
where \(\Omega _1(x,y,u,v)\) is given by (3.6). The proof is completed. \(\square \)
-
(5) Frequency Shifting Property
-
(i)
The 2D-NLCWD of \(\widehat{f}(x,y)=f(x,y)\textrm{e}^{i(u_0x+v_0y)}\) has the form
$$\begin{aligned}&{2D}\mathcal{L}\mathcal{W}_{\widehat{f}}^{\mathcal {M}}(x,y,u,v)=\mathcal {C}_{p-k} (t_1,t_2)\textrm{e}^{\frac{i}{\textrm{det}(B)}(b_{12}-b_{21})(t_1y-t_2x)}\\&\quad \times \textrm{e}^{-\frac{i}{2\textrm{det}(B)}\left\{ [2(k_1-p_1) t_1+(k_2-p_2)t_2]u+[(k_2-p_2)t_1+2(k_3-p_3)t_2]v\right\} }\\&\quad \times {2D}\mathcal{L}\mathcal{W}_{f}^{\mathcal {M}}(x,y,u+t_1,v+t_2). \end{aligned}$$where
$$\begin{aligned} \left\{ \begin{array}{ll} t_1=-2\tilde{b}_{11}u_0\textrm{det}(B)-\tilde{b}_{12}v_0\textrm{det}(B)\\ t_2=-\tilde{b}_{12}u_0\textrm{det}(B)-2\tilde{b}_{22}v_0\textrm{det}(B). \end{array} \right. \end{aligned}$$ -
(ii)
The 2D-NLCAF of \(\widehat{f}(x,y)=f(x,y) \textrm{e}^{i(u_0x+v_0y)}\) can be expressed as
$$\begin{aligned}&{2D}\mathcal{L}\mathcal{A}_{\widehat{f}}^{\mathcal {M}}(\tau ,\eta ,u,v)= \textrm{e}^{i(u_0\tau +v_0\eta )}{2D}\mathcal{L}\mathcal{A}_{f}^{\mathcal {M}}(\tau ,\eta ,u,v). \end{aligned}$$
Proof
We prove \((\textrm{i})\) since the proof of property \((\textrm{ii})\) is straightforward. By simple computations, we proceed as
We now find parametters \(t_1,t_2\), which satisfy
By simple computations, we obtain
Therefore, the above equations turn into
Using (3.7) and (3.10), the relation (3.9) turns to
which completes the proof. \(\square \)
-
(6) Relationship with the 2D-STFT
The STFT of a signal f(x, y) is defined as
where g(x, y) is the window function.
The relationships between the 2D-NLCWD and the 2D-STFT can be given by
where
and
In addition, the relationships between the 2D-NLCAF and the 2D-STFT can be presented by
where
Proof
Performing the change of variables \(x_1=x+\dfrac{\tau }{2}, y_1=y+\dfrac{\eta }{2}\), the relations (2.8) becomes
By virtue of (3.7), and (3.13), we proceed as
where
This allow us to recognize that
Next, let us consider
It is easy to verify that the above expression has the following form
Invoking equation above, the relation (3.14) can be rewritten as
which yields (3.11). We ignore the proof of (3.12) since it can be deduced in the similar way. \(\square \)
4 Applications
In this section, the 2D-NLCWD and 2D-NLCAF will be used for the detection of single-component and multi-component 2D-LFM signals as effective. Without loss of generality, we assume that \(\textrm{det}(B)=1.\)
4.1 Single-component 2D- LFM signal
Suppose that the single-component 2D-LFM signal is modeled as follows
where the amplitude \(A_0\), initial frequency \(m_0,r_0\), and frequency rate \(n_0,s_0\).
It is observed that
By applying (2.4), the 2D-NLCWD of \(\mathcal {S}(x,y)\) can be derived as
When \(p=k\), which means \(p_1=k_1, p_2=k_2,p_3=k_3,\) we infer directly that
Similarly, by simple computations and owing to (2.5), the 2D-NLCAF of \(\mathcal {S}(x,y)\) can given by
When \(p=k\), equation above becomes
Equations (4.2) and (4.3) show that if we choose a suitable parameter \(\mathcal {M}\), the 2D-NLCWD and 2D-NLCAF of the single-component 2D-LFM signal \(\mathcal {S}(x,y)\) can produce pulse signals. This indicates that the 2D-NLCWD and 2D-NLCAF are useful and effective for detecting single-component 2D-LFM signals. For example, we consider the single-component 2D-LFM signal:
and the parameter
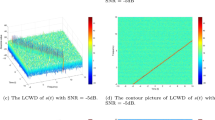
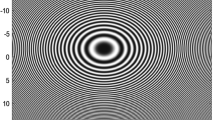
The 2D-NLCWD and 2D-NLCAF of \(\mathcal {S}_0(x,y)\) in some special value of (x, y) and \((\tau ,\eta )\) are shown in Fig. 1 and Fig. 2.

The absolute part of 2D-NLCWD of single-component 2D-LFM signal \(\mathcal {S}_0(x,y)\)

The absolute part of 2D-NSLCAF of of single-component 2D-LFM signal \(\mathcal {S}_0(x,y)\)
Furthermore, using (1.10) and (1.11), the 2D-WDNL and 2D-AFNL can be given by
and when \(p=0\), we have
Comparing (4.2) with (4.4) and (4.3) with (4.5), we realize that the 2D-NLCWD and 2D- NLCAF are more flexible than 2D-WDNL and 2D-AFNL in detecting a single-component LFM since extra parameters \(p_1,p_2,p_3\).

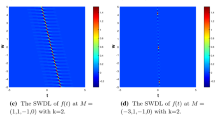
The 2D-NLCWD of tri-component 2D-LFM signal \(\mathcal {V}_0(x,y)\) with \(T=40\)
4.2 Multi-component 2D-LFM signal
The general of multi-component 2D-LFM signal has the form
where \(\mathcal {S}_j(x,y)=A_j\textrm{e}^{i\left[ (m_jx+n_jx^2)+(r_jy+s_jy^2)\right] }, \,(n_j,s_j \ne 0, \,\forall j\in \{1,...n\}).\)
It follows from (2.4) that
where
and the 2D-NLCWD of cross-term \({2D}\mathcal{L}\mathcal{W}_{\mathcal {S}_{j_1},\mathcal {S}_{j_2}}^{\mathcal {M}}\left( x,y,u,v\right) \)
When \(p=k, n_{j_1}=n_{j_2}=n_0\,,\,s_{j_1}=s_{j_2}=s_0, \forall j_1\ne j_2\), we obtain
Simlilary, the 2D-NLCAF of \(\mathcal {V}(x,y)\) can be expressed as
where
and
When \(p=k, n_{j_1}=n_{j_2}=n_0\,, \,s_{j_1}=s_{j_2}=s_0, \forall j_1\ne j_2\), the 2D-NLCAF of \(\mathcal {V}(x,y)\) can be presented as
From (4.7) and (4.8), we conclude that 2D-NLCWD and 2D-NLCAF are very useful in detecting of multi-component 2D-LFM signals. Therefore, the algorithms of 2D-NLCWD and 2D-NLCAF for multi-component 2D-LFM signals detection can also be easily deduced as well. The 2D-NLCWD of tri-component 2D chirp signal
with the parameter \(\mathcal {M}_0 \) in some special value of (x, y) are shown in Fig. 3.
5 Conclution
We have introduced two new distributions associated with 2D-NS-LCT. Then, we have proved some important properties of the proposed 2D integral transforms in great detail such as the shift properties, the conjugation symmetry properties, the marginal properties, the Moyal formula, and the relationship with the 2D-STFT. As a main consequence and application, the detection of single-component and multi-component 2D-LFM signals is also demonstrated by using the proposed transforms. Furthermore the proposed new distributions are more flexible than 2D-WDNL and 2D-AFNL in detecting 2D-LFM signals.
Data Availability
No datasets were generated or analysed during the current study.
References
Bai, R. F., Li, B. Z., & Cheng, Q. Y. (2012). Wigner-Ville distribution associated with the linear canonical transform. Journal of Applied Mathematics 1–14.
Che, T. W., Li, B. Z., & Xu, T. Z. (2012). The ambiguity function associated with the linear canonical transform. EURASIP Journal on Advances in Signal Processing, 138, 1–14.
Ding, J. J., & Pei, S. C. (2011). Eigenfunctions and self-imaging phenomena of the two-dimensional non-separable linear canonical transform. The Journal of the Optical Society of America, 28, 82–95.
Ding, J. J., Pei, S. C., & Liu, C. L. (2012). Improved implementation algorithms of the two-dimensional non-separable linear canonical transform. The Journal of the Optical Society of America, 29, 1615–1624.
Dong, P., & Galatsanos, N. P. (2002). Affine transformation resistant watermarking based on image normalization. IEEE International Conference on Image Processing, 3, 489–492.
Johnston, J. A. (1989). Wigner distribution and FM radar signal design. IEE Proceeding of F: Radar and Signal Process, 136, 81–88.
Koç, A., Ozaktas, H. M., & Hesselink, L. (2010). Fast and accurate computation of two-dimensional non-separable quadratic-phase integrals. The Journal of the Optical Society of America, 27, 1288–1302.
Liu, Z. J., Chen, H., Liu, T., Li, P. F., Dai, J. M., Sun, X. G., & Liu, S. T. (2010). Double-image encryption based on the affine transform and the gyrator transform. Journal of the Optic, 12, 035407.
Minh, L. T. (2023). Modified ambiguity function and Wigner distribution associated with quadratic-phase Fourier transform. The Journal of Fourier and Analysis and Application. Accepted (November 6, 2023).
Pei, S. C., & Ding, J. J. (2009). Properties, digital implementation, applications, and self image phenomena of the gyrator transform. In 17th European Signal Processing Conference (EUSIPCO) (Curran Associates, Inc.) (pp. 441–444).
Pei, S. C., & Ding, J. J. (2001). Two-dimensional affine generalized fractional Fourier transform. IEEE Transactions Signal Processing, 49(4), 878–897.
Pei, S. C., & Ding, J. J. (2010). Relations between fractional operations and time-frequency distributions and their applications. IEEE Transactions Signal Processing, 49, 1638–1655.
Pei, S. C., & Ding, J. J. (2010). Fractional Fourier transform: Wigner distribution, and filter design for stationary and nonstationary random processes. IEEE Transactions Signal Processing, 58, 4079–4092.
Ravi, K., Sheridan, J. T., & Basanta, B. (2018). Nonlinear double image encryption using 2D non-separable linear canonical transform and phase retrieval algorithm. Optics & Laser Technology, 107, 353–360.
Rodrigo, J. A., Alieva, T., & Calvo, M. L. (2007). Experimental implementation of the gyrator transform. The Journal of the Optical Society of America, 24, 3135–3139.
Rodrigo, J. A., Alieva, T., & Calvo, M. L. (2007). Applications of gyrator transform for image processing. Optics Communication, 278, 279–284.
Shah, F. A., & Teali, A. A. (2023). Scaling Wigner distribution in the framework of linear canonical transform. Circuits, Systems, and Signal Processing, 42, 1181–1205.
Teali, A. A., Shah, F. A., & Tantary, A. Y. (2023). Coupled fractional Wigner distribution with applications to LFM signals. Fractals, 31(02), 2340020.
Wei, D., & Shen, Y. (2022). New two-dimensional Wigner distribution and ambiguity function associated with the two-dimensional nonseparable linear canonical transform. Circuits, Systems, and Signal Processing, 41, 77–101.
Zayed, A. (2019). A new perspective on the two- dimensional fractional Fourier transform and its relationship with the Wigner distribution. The Journal of Fourier and Analysis and Application, 25(2), 460–487.
Zhang, Z. C. (2023). Uncertainty principle for free metaplectic transformation. The Journal of Fourier and Analysis and Application, 29(71).
Zhang, Z. C., & Lou, M. (2015). New integral transforms for generalizing the Wigner distribution and ambiguity function. IEEE Signal Processing Letters, 22(4).
Zhang, Z. C. (2016). Novel Wigner distribution and ambiguity function associated with the linear canonical transform domain. Optik, 127, 4995–5012.
Zhang, Z. C., Jiang, X., Qiang, S. Z., Sun, A., Liang, Z. Y., Shi, X., & Wu, A. Y. (2021). Y: Scaled Wigner distribution using fractional instantaneous autocorrelation. Optik, 237, 166691.
Zhang, Z. C., Zhu, Z., Li, D., & He, Y. (2023). Free metaplectic Wigner distribution: Definition and Heisenberg’s uncertainty principles. IEEE Transactions on Information Theory, 69(10), 6787–6810.
Zhao, L., Healy, J. J., & Sheridan, J. T. (2014). Two-dimensional nonseparable linear canonical transform: sampling theorem and unitary discretization. The Journal of the Optical Society of America, 31(12), 2631–2641.
Acknowledgements
The author would like to thank the anonymous referees very much for suggestions and valuable remarks which have helped to improve the exposition of the paper.
Author information
Authors and Affiliations
Contributions
L. T Minh wrote the main manuscript text and reviewed the manuscript.
Corresponding author
Ethics declarations
Conflicts of interest
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Minh, L.T. Novel two-dimensional Wigner distribution and ambiguity function in the framework of the two-dimensional nonseparable linear canonical transform. Multidim Syst Sign Process 35, 11–35 (2024). https://doi.org/10.1007/s11045-024-00886-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11045-024-00886-2
Keywords
- Wigner distribution
- Ambiguity function
- Nonseparable linear canonical transform
- Single-and multi-component LFM signal