
Abstract
This paper deals with a low-frequency analysis of a viscoelastic inhomogeneous bar subject to end loads. The spatial variation of the problem parameters is taken into consideration. Explicit asymptotic corrections to the conventional equations of rigid body motion are derived in the form of integro-differential operators acting on longitudinal force or bending moment. The refined equations incorporate the effect of an internal viscoelastic microstructure on the overall dynamic response. Comparison with the exact time-harmonic solutions for extension and bending of a bar demonstrates the advantages of the developed approach. This research is inspired by modeling of railcar dynamics.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Mathematical modeling of the effect of an internal microstructure, aimed to extend the range of validity of the traditional equations of rigid body dynamics, is of obvious interest for various industrial applications. In particular, computational procedures for predicting longitudinal forces in railway dynamics (e.g., see recent contributions Iwnicki 2006; Ansari et al. 2009; Chen et al. 2012) may benefit from taking into account the absorption of vibration energy by transported loads including raw materials.
Among the publications on the subject, we mention (Milton and Willis 2007) which suggests a general methodology within the framework of linear anisotropic elasticity leading to a sort of ‘macroscale’ Newton’s second law with a frequency-dependent mass. We also cite here (Addessamad et al. 2009) dealing with homogenization of viscoelastic periodic media.
This paper is concerned with a low-frequency analysis of an inhomogeneous viscoelastic microstructure. The adapted asymptotic methodology was earlier exploited both for periodic and thin functionally graded structures; see, e.g., Craster et al. (2013) and references therein. The proposed perturbation scheme is developed for an inhomogeneous viscoelastic bar governed by the conventional integral constitutive relations in linear viscoelasticity with strains in the left-hand sides; see Sect. 2. In-plane horizontal, vertical and rotational motions induced by prescribed end forces and moments are studied starting from the classical one-dimensional theories for bar extension and bending. In the case of bending, the consideration is restricted to a symmetry of problem parameters that enables separation of vertical and rotational motions. A typical timescale characterizing viscous behavior is assumed to be much greater than the time elastic waves take to propagate the distance between the ends of the bar.
Explicit low-frequency corrections to the equations of rigid body motion are constructed in Sects. 3 and 4. They are given in the form of integro-differential operators acting on longitudinal force or bending moment. An example of a homogeneous bar is presented in Sect. 5. A comparison with the exact solutions of the original time-harmonic problems for extension and bending of a bar (see Sect. 7 and the Appendix) demonstrates the advantages of the proposed approach. Numerical data are calculated for a Voigt bar.
2 Statement of the problem
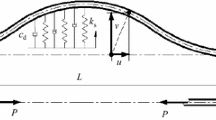
Consider a viscoelastic inhomogeneous bar of length 2l subject to end longitudinal and transverse forces as well as end bending moments, see Fig. 1. The 1D equations of motion are written as
and
where x is the longitudinal coordinate, t is time, u is longitudinal displacement, w is transverse displacement, F is longitudinal force, G is bending moment, N is transverse force, and m(x) is mass per unit length.

Scheme of loading
Linear viscoelastic behavior within the classical theories of extension and bending can be described by the following relations (see, e.g., Cristensen 1982; Rabotnov 1980):
and
where e=u x and κ=w xx are the longitudinal and bending strains. We also use the notation: E(x) is the Young’s modulus, A(x) is cross-sectional area, I(x) is the second moment of inertia, K(γ(x)t) is creep kernel depending on function γ(x). For example, for the Voigt model
with \(\gamma(x)=\frac{E(x)}{\mu(x)}\), where μ(x) denotes viscosity. In this case, we get from (2.4) and (2.5), respectively,
and
The boundary conditions corresponding to the end forces and moments shown in Fig. 1 are
and
The goal of the paper is to consider low-frequency motions starting from the governing equations above. Let us denote typical values of the variable quantities m(x), E(x), A(x), I(x) and γ(x) by m 0, E 0, A 0, I 0, and γ 0, respectively. In what follows, we assume that a typical time scale of viscous behavior \(\gamma_{0}^{-1}\) is much greater than a characteristic time that elastic waves take to propagate the distance between the ends of the bar, i.e.,
for horizontal motions governed by (2.1), (2.4) and (2.9), whereas
for vertical and rotational motions governed by (2.2), (2.3), (2.5), and (2.10).
3 Horizontal motion
Consider the problem of (2.1), (2.4) and (2.9) under the asymptotic assumption (2.11). We introduce dimensionless variables and dimensionless displacement and force by the formulae
and
where
is a small parameter related to (2.11). Then we get
and
with
where
and
Here and below we assume that the integral term in the right-hand side of (3.5) is of order F ∗.
We are looking for the solution of (3.4)–(3.6) in the form
At leading order
subject to the boundary conditions
Immediately, we get from the second equation (3.10) that
i.e., at leading order we observe horizontal rigid body motion. Next, we have from the first equation (3.10), taking into account the imposed boundary conditions (3.11), that
At the same time,
or
At next order
with the homogeneous boundary conditions f 1(±1,τ)=0. By integrating the second equation (3.16), we have
where v 1(τ) is a low-frequency correction to the center displacement. The second derivative of (3.17) in the dimensionless time is
We also get from the first equation (3.16) and the homogeneous boundary conditions above that
Finally, we obtain for the acceleration of the center (ξ=0) that
or in the original variables
where a h (t)=lv tt (t) and \(M= \int_{-l}^{l}m(x)\,dx\) denote acceleration and mass, respectively, and
The derived formula (3.21) contains in the right-hand side a low-frequency correction to the classical equation of rigid body motion Ma h =F 2−F 1. This correction incorporates the effect of viscoelasticity of an inhomogeneous bar and makes possible calculating dynamic response caused by self-equilibrated external loads, i.e., F 1=F 2. The quantity (3.22) is crucial for the obtained correction. It corresponds to the low-frequency variation of the longitudinal force along the length.
A similar formula can be derived for any point of the structure (|x|≪l) starting from the equations in this section, in particular, for the left (x=l) and right (x=−l) ends, respectively. Indeed, we get for the ends of the bar (|x|=∓l)
where the upper(lower) sign corresponds to the left (right) end.
4 Vertical motion and rotation
For the sake of simplicity, we assume a symmetry of the problem parameters specified by even functions m(x),E(x),I(x), and γ(x). In this case the boundary condition (2.10) corresponding to the bending vibration can be separated into two parts:
and
where
and
In the low-frequency domain, the boundary conditions (4.1) and (4.2) govern perturbed rigid body vertical motion and rotation, respectively; see Fig. 2.

Perturbed rigid body motion: (a) overall, (b) vertical, (c) rotational
We introduce a small parameter
according to (2.12) and dimensionless quantities by the formulae
Then, we get from (2.2), (2.3), (2.5), (4.1), and (4.2) that
and
with
or
In the formulae above,
We express the sought for solution as
At leading order
subject to
or
First, consider the vertical motion for which w ∗(ξ,τ) and G ∗(ξ,τ) are even functions of ξ, whereas N ∗(ξ,τ) is an odd function. In this case we get from the second equation (4.12) that
corresponding to the vertical rigid body motion. We also get, taking into account the boundary conditions (4.13) imposed on n 0, that
and
Then, we derive from the last equation (4.12), by applying the boundary conditions (4.13) related to g 0, that
At next order
and
with the homogeneous boundary conditions n 1(∓1,τ)=g 1(∓1,τ)=0, where g 0 is given by (4.18). By integrating twice the last equation (4.19), we have
leading to
Then, from the first equation (4.19) and the homogeneous boundary conditions above
Finally, we obtain for the refined acceleration of the center ξ=0 that
or
where a v (t)=lv tt (t), \(M= \int_{-l}^{l}m(x)\,dx\) and
In case of a perturbed rigid body rotation, w ∗(ξ,τ) and G ∗(ξ,τ) are odd functions of ξ, while N ∗(ξ,τ) is an even function. Thus, we get from the second equation (4.12) that
Now, we multiply the first equation (4.12) by ξ and get
By integrating the latter over the length of the structure and taking into account the boundary conditions (4.14) along with the third equation (4.12), we have
We also deduce from (4.12), (4.14) and (4.27) that
and
Then, integrating the third equation (4.19), we obtain
where g 0 is now given by (4.29) and v 1(τ)=w 1ξ (ξ,τ) at ξ=0. The second derivative of (4.30) in the dimensionless time is
Finally,
The refined angular acceleration of the center ξ=0, namely
is given by
In the original variables the last equation takes the form
where angular acceleration Ω and moment of inertia J are given by Ω=v tt and \(J= \int_{-l}^{l} x^{2} m(x) \,dx\), whereas
Equations (4.24) and (4.34) contain low-frequency corrections to classical equation of rigid body dynamics Ma v =N 1−N 2 and JΩ=G 2−G 1−l(N 1+N 2). The quantities (4.25) and (4.35) are key for the established approximate formulae. They express the leading order low-frequency variation of the bending moment along the length of the structure.
5 A homogeneous bar
The derived equations (3.21), (4.24) and (4.34) take a simpler form for the perturbed rigid body motion of a homogeneous viscoelastic bar. In this case m(x)=m, E(x)=E, A(x)=A, I(x)=I, and γ(x)=γ, and the formulae (3.22), (4.25), and (4.35) become
and
By inserting the latter into (3.21), (4.24) and (4.34), we respectively get for the horizontal motion
for the vertical motion
and for a rotation
where M=2ml, \(J=\frac{2}{3}ml^{3}\), \(\acute{F}_{0}=F_{2}-F_{1}\), and \(\acute{G}_{0}=\frac{3l}{40}(N_{1}-N_{2})+\frac{1}{6}(G_{1}+G_{2})\) in (5.5) or \(\acute{G}_{0}=-\frac{11 l}{21}(N_{1}+N_{2})+\frac {13}{7}(G_{2}-G_{1})\) in (5.6).
As an illustration, we specify these formulae for a Voigt bar; see (2.6). They become
and
6 Numerical results
As an example, consider time-harmonic motion of a homogeneous viscoelastic bar studied in the previous section. In this case the constitute relations (2.4) and (2.5) become
and
with
where ω is the circular frequency. Here and below the factor e −iωt is separated.
First, let the horizontal motion of the bar be induced by a force applied to its right end, i.e., F(−l)=0 and F(l)=F 2; see Fig. 1. Then, we get from Eq. (5.4) that
where
This formula coincides with a two-term low-frequency expansion of the exact solution of the associated problem; see (A.6) and (A.7).
It is worth mentioning that in line with the dynamic homogenization procedure developed for three-dimensional anisotropic elastic solids (Milton and Willis 2007), this result can be presented in the form of a generalized Newton’s second law with a frequency-dependent complex mass given by
The latter concept enables incorporating the effect of internal viscoelasticity into rigid body dynamics.
Numerical data are presented in Figs. 3 and 4, where \(a^{*}_{h}=Ma/F_{2}\) is the normalized acceleration plotted versus the dimensionless frequency λ h . A Voigt material is studied. In this case
with
The solid and dashed lines correspond to the exact solution (A.9) and the asymptotic formulae (6.4), respectively. The curves related to the values β=0.1,1.0,5.0 are marked with the numbers 1, 2 and 3. A numerical comparison presented in these figures demonstrates the advantage of the developed methodology, which considerably extends the range of validity of the conventional Newton’s second law. There is also a clear potential for increasing the accuracy of the formula (6.6) using Pade approximations; see, e.g., Andrianov and Awrejcewicz (2001).

Horizontal acceleration vs. frequency (real part)

Horizontal acceleration vs. frequency (imaginary part)
Now we proceed to the vertical motion caused by equal end forces, i.e., N(l)=−N(−l)=N 2 and G(±l)=0 (see Fig. 2). Thus, Eq. (5.5) becomes
where
The latter formula also corresponds to a two-term asymptotic expansion of the exact solution, see (A.9) and (A.10).
Numerical results are given in Figs. 5 and 6 for the same values of the parameter β which is now is expressed by
In addition, we adapt here the notation \(a_{v}^{*}=-Ma/2N_{2}\) and define the parameter δ in (6.8) as

Vertical acceleration vs. frequency (real part)

Vertical acceleration vs. frequency (imaginary part)
As before, the two-term formula (6.8) extends the range of the applicability of Newton’s second law to the vertical motion of a bar. Similarly to the data displayed in Figs. 3 and 4, we observe a better accuracy of the aforementioned formula at greater values of the parameter β responsible for the effect of viscosity.
7 Concluding remarks
The developed perturbation scheme consists of the following steps. First, we determine rigid body accelerations. Then, we calculate the leading order variation of the longitudinal force or bending moments along the bar. At next order, we evaluate the sought for corrections to rigid body accelerations expressed in terms of the aforementioned force and moments. It is worth noting that a representation of the constitutive relations in the form (2.4) and (2.5) with strains in the left-hand sides is crucial for perturbing rigid body motions.
The developed approach enables various extensions. In particular, a similar analysis can be initiated for 2D antiplane and plane problems for a viscoelastic rectangular loaded by stresses prescribed along its sides. For an elongated rectangular there is an obvious possibility for adapting higher-order asymptotic structure theories. In this case not only one-dimensional equations of motion but also related boundary conditions should be refined; see Babenkova and Kaplunov (2003a) and Babenkova and Kaplunov (2003b). It is clear that the calculation of low-frequency corrections for more general geometries relies on numerical calculations. At the same time, the perturbation algorithm presented in the paper should not be subject to major changes.
The proposed methodology is not restricted to the adapted linear viscoelastic model. More elaborate theories taking into account nonlinearity and time inhomogeneity of viscous behavior can be taken into consideration, at least for a bar. In addition, the established integro-differential relations may be applied to various problems of multibody dynamics, including evaluation of longitudinal forces in railcars.
References
Addessamad, Z., Kostin, J., Panasenko, G., Smyshlyaev, V.P.: Memory effect in homogenisation of a viscoelastic Kelvin–Voigt model with time-dependent coefficients. Math. Models Methods Appl. Sci. 9, 1603–1630 (2009)
Andrianov, I.V., Awrejcewicz, J.: New trends in asymptotic approaches: summation and interpolation methods. Appl. Mech. Rev. 54(1), 69–92 (2001)
Ansari, M., Esmailzadeh, E., Younesian, P.: Longitudinal dynamics of freight trains. Int. J. Heavy Veh. Syst. 16(1/2), 102–131 (2009)
Babenkova, E., Kaplunov, J.: The two-term interior asymptotic expansion in the case of low-frequency longitudinal vibrations of an elongated elastic rectangle. In: Proc. of the IUTAM Symposium on Asymptotics, Singularities and Homogenisation in Problems of Mechanics. Series Solid Mechanics and Its Applications, vol. 113, pp. 123–131. Kluwer Academic, Dordrecht (2003a)
Babenkova, E., Kaplunov, J.: Low-frequency decay conditions for a semi-infinite elastic strip. Proc. R. Soc. Lond. Ser. A 460, 2153–2169 (2003b)
Chen, C., Han, M., Han, Y.: A numerical model for railroad freight car-to-car end impact. Discrete Dyn. Nat. Soc. 927592, 11 (2012)
Craster, R.V., Joseph, L.M., Kaplunov, J.: Long-wave asymptotic theories: the connection between functionally graded waveguides and periodic media. Wave Motion 51, 581–588 (2013)
Cristensen, R.M.: Viscoelasticity: An Introduction, vol. 359, 2nd edn. Academic Press, San Diego (1982)
Iwnicki, S.: Handbook of Railway Vehicle Dynamics, vol. 552. CRC Press, Boca Raton (2006)
Milton, G.W., Willis, J.R.: On modifications of Newton’s second law and linear continuum elastodynamics. Proc. R. Soc. Lond. Ser. A 2079, 855–880 (2007)
Rabotnov, Yu.N.: Elements of Hereditary Solid Mechanics, vol. 387. Mir, Moscow (1980)
Acknowledgements
J. Kaplunov and A. Shestakova gratefully acknowledge support from the industrial project with AMSTED Rail, USA. J. Kaplunov’s research in the area of mechanics of inhomogeneous solids was supported by National University of Science and Technology “MISiS”, Russia by grant K3-2014-052. The authors also grateful to Dr. D. Prikazchikov for a number of valuable comments.
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
Substitute the formulae (6.1) and (6.2) into the equations of motion (2.1) and (2.2), (2.3) specified for a time-harmonic motion of a homogeneous bar and introduce dimensionless variables. Then, these equations take the form
and
where \(q_{h}^{2}=\lambda_{h}^{2}(1+i\delta)\) and \(q_{v}^{4}=\lambda _{v}^{2}(1+i\delta)\). Subject them to the boundary conditions corresponding to the problems analyzed in the previous section, i.e.,
and
The solution of the problem (A.1) and (A.3) is given by
In this case the horizontal acceleration of the center (ξ=0) is given by
Over the low-frequency band λ h ≪1 we get q h ≪1 assuming that δ∼1 (γ∼ω) in (5.3). As a result, we arrive at the expansion
The solution of the problem (A.2)–(A.4) can be written as
The associated acceleration of the center ξ=0, namely
has the following low-frequency expansion
Rights and permissions
About this article

Cite this article
Kaplunov, J., Shestakova, A., Aleynikov, I. et al. Low-frequency perturbations of rigid body motions of a viscoelastic inhomogeneous bar. Mech Time-Depend Mater 19, 135–151 (2015). https://doi.org/10.1007/s11043-015-9256-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11043-015-9256-x