
An attempt has been made to perform a comparative study on advances in the shear deformation theory for analyzing the statics and dynamics of different plates with the use of numerical examples. Initially, shape functions for the displacement field across the plate thickness are compared, and then, the stresses, deflections, and natural frequencies of laminated composite plates are also compared.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1. Introduction
Composite laminates are widely preferred structures due to their high stiffness and strength-to-weight ratio. Besides, these structures have a high fatigue strength and good corrosion resistance. To investigate the structural and mechanical properties of these types of materials, studies on their static and dynamic behavior are needed. They include the analysis of inplane/out-of-plane stress vs. strain, load vs. displacement, buckling vs. postbuckling, and free and forced vibration relations.
The initial development of beam and plate theories started in the beginning of the 17th century. Daniel Bernoulli and Leonhard Euler were the first who proposed a beam theory including all kinematic and static assumptions. This theory later became known as the Euler–Bernoulli beam theory and paved a way for the development of various theories for plates and shells. In the middle of the 18th century, Kirchhoff [1] formulated a theory purely devoted to plates. Chladni experimentally verified the theory, and S. Germain was the first to propose an equation for vibrations of plates, as reported in [2].
Kirchhoff reduced the 3-D equations of motion of plates to 2-D ones, derived using Navier and Poisson power series and introducing the assumption that the normal to plate midplane remains unchanged after bending of plates. The central deflection w of a plate under the action of a uniform surface load q is determined by the equation
where Δ is the Laplace operator.
Later, Strutt [3] approximated the results of boundary value problems using a direct method. In 1908, Ritz [4] reformulated an approximation technique to obtain a generalized solution, which is currently known as the Rayleigh–Ritz method. An analogical approach for shells was suggested by Love [5] and is known as the Kirchhoff–Love shell theory.
For the first time, the shear deformation effect was introduced into deformation equation by Timoshenko [6]. He used it for beams and reformulated beam vibration equations. This theory is now known as the Timoshenko first-order shear beam theory. The interpretations of nonlinear deformation of thin plates were first addressed by von Karman [7]. He assumed that the strains of thin plates are nonlinear due to large deflections and accordingly formulated his beam theory. Later on, other refined theories of shells and plates were proposed [8,9,10,11,12,13]. The concept of asymptotic integration was first introduced by Gol’denveizer [12, 13]. This expansion method was then used by Heijden [14] in the elasticity equation to obtain 2-D equations of boundary conditions. Meantime, several modifications of Kirchhoff’s plate theory was proposed, among which Reissner’s modification became widely popular. Reissner [15] introduced 3-D statically admissible fields, which set an extra boundary condition, and a sixth-order equation instead of Kirchhoff’s fourth-order one was obtained. A number of other works on this topic were also published by him [16,17,18,19,20] and other researchers [21,22,23,24,25,26,27,28,29]. The modified deflection equation for plates has the form
Mindlin [30] extended Kirchhoff’s plate theory to dynamic problems using shear stress assumptions. The modified deflection equation of plates is
Later on, many works [31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61,62,63,64,65,66,67,68] were published in this field. Most of researchers have concluded that Reissner’s and Mindlin’s formulations are very similar in the finite-element formulation, and this theory now is commonly known as the Reissner–Mindlin plate theory or the first-order shear deformation theory (FSDT).
These theories were modified into higher-orders ones (HSDTs), based on various assumptions, by many researchers [21,22,23, 26, 27, 29, 39, 43, 47, 69,70,71,72,73,74]. In [24, 38, 61,62,63, 75], plate bending theories and Reissner’s theory and analyzed, the disadvantages of FSDT and CLPT are revealed and removed with the use of a sixth-order equation of motion for practically applicable end conditions.
According to the literature information, the different plate theories used can be classified as the classical laminated plate theory (CLPT), the first-order shear deformation theory (FSDT), and higher-order shear deformation theories (HSDTs). They will be discussed more fully in what follows.
1.1. Classical laminated plate theory (CLPT)
This theory is useful to analyze thin laminated composite plates. It is simple, but disregards shear deformations. The midplane is assumed to represent the 3-D plate in the 2-D form, because plate thickness and the position of its midplane remain unchanged during deformation. As a result, the shear deformation and stress are neglected in the transverse direction. Some of the modern conceptions using Kirchhoff’s approach to the plate theory are assigned to the CLPT. Reddy and Robbins [76] presented a displacement-field-based comparative study of CLPT. Liu and Li [77] presented shear deformation, layer-wise, and zig-zag theories in their study. They developed global local double-superposition theories. The progress in theories laminated composite plates (LCPs) and sandwiched plates was assessed by Altenbach [2]. A review of displacement- and stress-based modified FSDTs of LCPs is given by Ghugal and Shimpi [52], where various refined shear deformation theories for LCPs are discussed. A study on the zig-zag theory for LCPs and shells was presented by Carrera [53]. The development of FSDT for plates and shells was analyzed by Reddy and Arciniega [54]. A selective survey and evaluation of the transverse/interlaminar stress in LCPs was given by Kant and Swaminathan [56]. The account of the effect of free edge since 1967 was reviewed by Mittelstedt and Becker [57]. Liew et al. [58] employed the general theory of thin plates, including surface effects, to study their static and dynamic responses. Shimpi and Patel [78] redefined the plate theory by using two variables to study the natural frequencies of plates and showed its closeness to the CLPT. Ebrahimi and Rastgo [79] examined the vibration parameters of thin functionally graded (FG) circular plates by using the CLPT and verified its results by comparing them with 3D finiteelement (FE) calculations. Carrera and Brischetto [80] discussed the Poisson locking mechanism by using simplified kinematic assumptions for isotropic, orthotropic, and multilayered composite plates. Mohammadi et al. [81] presented an analytical Levy solution for a buckling analysis of thin FG plates based on the CLPT for different end conditions, power factors, and aspect ratios of the plates. Ansari et al. [82] reformulated the CLPT by using an interatomic potential and Eringen’s nonlocal equation to study the biaxial buckling and vibration of graphene sheets. Malekzadeh and Shojaee [83] employed the differential quadrature method with two variables to refine the CLPT and applied it to a dynamic analysis of nanoplates. Mahi et al. [84] formulated a new plate theory using Hamilton’s principle and the Navier-type technique to obtain the natural frequencies of different plates. Reddy et al. [85] presented FE models using nonlinear theories for axisymmetric bending of circular plates. Zhang et al. [86] presented an improvised form of CLPT in an element-free KP-Ritz framework for a buckling analysis of graphene sheets. Do and Thai [87] reformed Kirchhoff’s plate theory for a thermomechanical analysis of FG materials and compared the results found with FSDT calculations. Joshi et al. [88] presented a nonclassical analytical model for studying the free vibrations of FG plates in thermal environments by modifying couple stresses. The thermal buckling was found to depend on the buckling temperature and the fundamental frequency. Li and Lee [89] analyzed a circular plate subjected to concentrated and uniformly distributed transverse loads to obtain the deflection, rotation, and stresses at the plate center using Bessel functions and explicit expressions.
1.2. First-order shear deformation theory
The first conception of rotary inertia and shear deformation was introduced into the plate equation by Reissner [15]. Later on, for dynamic problems, Mindlin [30] improved the theoretical model of plate deformation. Since both the theories consider the shear deformation effect on plate deformation, they are named the first-order shear deformation theory. However, the concept of shear deformation is not unique — it is an extension of Timoshenko work of beam vibration [6]. The effect of shear is introduced by shear correction factors. This factor is chosen considering various aspects — the energy of shear deformation, material constants, the assembling pattern of laminate, geometry, configuration, loading, and end conditions. The FSDT is generally employed to analyze thin and moderately thick plates.
Whitney and Pagano [90] presented shear deformation theories for heterogeneous laminated plates considering local transverse shear deformations. This work was extended to LCPs [91]. Noor [73] used both 2-D Kirchhoff’s and FSDT theories to determine the vibration frequencies of multilayer plates. He presented an improved CLPT theory to represent the 3-D elasticity equations by using higher-order functions. Liew et al. [92] presented an extensive appraisal on vibrations of thick plates. Reddy and Kuppusamy [93] employed 3-D elasticity equations and a shear-deformable plate theory to analyze vibration parameters of anisotropic plates. Reddy [94] presented a generalized 2-D FSDT of LCPs in lieu of displacement field approximation across the plate thickness. Later, [95], he generalized the laminate theory based on displacements of 2-D plates. In [96], a theory of shear deformation of LCPs with the use of Reissner variational principle is presented by Murakami. In [97], Chandrashekhara et al. presented a theory of shear-deformable LCPs using Reissner’s variational principle to calculate their inplane response. Averill et al. [98] proposed an exact solution for symmetric laminated composites beams using the FSDT and considering the rotary inertia. Touratier [99] carried out a finite-element analysis (FEA) for plates with great side-to-thickness ratios to get an exact value for shear constraints. Jonnalagadda et al. [100] used the FSDT by neglecting shear correction factors to analyze shear stresses at the bottom and top surface of plates. Eisenberger et al. [101] used the FSDT for a graphite/epoxy LCPs to determine shear deformations at different their aspect ratios. Qi et al. [102] analyzed the exact vibration frequency of a laminated beam considering the effect of rotary inertia and shear deformations. Wang [103] proposed a modified form of the conventional FSDT assuming that inplane displacements varied linearly and the transverse deflection remained constant across the plate thickness. KnightJr et al. [104] studied the free vibration response of a fiber-reinforced skew LCP by the FSDT assuming two shear strains in the place of two rotational displacements to overcome shear locking. Rolfes et al. [105] reformulated the conventional Reissner’s and Mindlin’s theory assuming a variable distribution of the transverse shear strain across the plate thickness. Tanov et al. [106] formulated a FSDT using a single-field displacement FE model to analyze the transverse thermal stresses in laminated plates. Auricchio et al. [107] modified the shell-type FE in the FSDT and eliminated the correction factor to calculate the actual distribution of shear strain and stress in the thickness direction. Wen et al. [108] presented a new mixed variational formulation considering the out-of-plane stress as the factor for variation to obtain an analytical solution neglecting the shear correction factor. Yu [109] studied large deflections of Reisner’s plates using the boundary element method and presented a numerical model based on 2-D elasticity equations to analyze the geometrical nonlinearity in bending and verified the results obtained. Shimpi et al. [110] modified the FSDT without altering the kinematic assumptions. He used the variational asymptotic technique assuming 2-D plate displacements instead of 3-D displacement fields to find an exact solution and compared results with those obtained from the CLPT and FSDT. Nguyen et al. [111] developed two new FSDTs assuming two unknown functions instead of three ones to calculate the modal parameters of simply supported plates. Reddy [112] derived the transverse shear stresses from membrane stresses and equilibrium equations of plates using the FSDT. Ma et al. [113] modified and reformulated the CLPT and FSDT using the nonlinear Eringen and von Karman strains to integrate the bending response of plates. Zhu et al. [114] developed a nonclassical Mindlin plate with a reformed couple-stress theory to determine the natural frequency of a plate with a varying of thickness. Thai et al. [115] conducted a FEA to study the free vibration of a LCP based on the FSDT. Thai et al. [116] have used four unknown variables in the FSDT instead of two ones to obtain displacement equations. Mantari et al. [117] presented closed-form of solutions by reducing the number of unknowns and using Hamilton’s principle to find the natural frequency of a simply supported plate. Liu et al. [118] presented a simple FSDT incorporating Hamilton’s principle to obtain a Navier-type analytical solution for predicting the fundamental frequencies. Rikards et al. [119] presented a model for analyzing the static bending, buckling, and natural frequency of a moderately thick micro-FG plate with account of shear locking and shear deformation.
1.3. Higher-order shear deformation theory (HSDT)
The FSDT is efficient and accurate for a total structural analysis of thin and moderately thick LCPs. However, the accuracy of the interlaminar stress distribution, delamination, and local strains is unpredictable. Further, the FSDT is limited to simply supported plates. Thus, a HSDT was formulated to overcome the difficulties of CLPT and FSDT. The first work in this direction was published by Reddy [69]. His findings are summarized in book [47]. Setoodeh et al. [120] studied vibrations of plates by a FEA with triangular elements. Hull et al. [121] analyzed the vibration parameter of LCPs resting on elastically restrained edges by the FEA. Ahmadian et al. [122] performed a FEA of vibration of orthotropic square stepped plates. Desai et al. [123] conducted a forced vibration analysis for rectangular plates using the FEA. An accurate 3-D higher-order 18-node element was implemented in the FEA by Sheikh et al. [124] to study the free vibration of a LCP. Chakrabarti [125] modified the FSDT using a triangular element to overcome the shear locking by considering the transverse and shear displacements to obtain vibration parameters of a plate. A nonconforming C1-FEA (triangular element) was used by Chakrabarti and Sheikh [126,127,128] to calculate the natural frequencies of LCPs. Latheswary et al. [129] investigated the nonlinear dynamic response of a thin skew LCP using a FEA with von Karman’s assumption for large amplitudes. The free vibration frequencies for a LCP were derived from the TSDT (third-order) using the FEA by Batra [130]. Batra et al. [131] used the Langrange shape function in the FEA for a static and dynamic analysis of a thick isotropic plate with the help of HSDT. Shiau [132] calculated the natural frequencies of thick square plates made from different materials. Moleiro et al. [133] used a highly accurate triangular plate element in a FEA to study free vibrations of a thermally buckled sandwich LCP. Soares et al. [134] and Tanveer 135] developed mixed least-square FE models to study the free-vibration of an LCP. A nonlinear displacement field was developed by Kuo [136] considering the shear strain in the forced vibration response of a piezo-laminated composite. The vibration analysis of an LCP with an inconsistent fiber spacing was studied by Van et al. using the FEA [137]. Taj [138] modeled the vibration response of LCPs/shells by the FEA with a smooth quadrilateral flat shell element allowing inplane rotations. Manna [139] presented a FEA formulation based on the TSDT for static and dynamic responses of FG plates subjected to external loads. Natarajan [140] modified the FSTD to a HSDT by using 18-node 51-DOF element to study the vibration of tapered isotropic plates with a linearly varying thickness. A quad-8 FE based on the HSDT was used in the FEA by Li et al. [141] to investigate the free vibration behavior of sandwich FG plates. Ribeiro [142] proposed a layerwise model in the FEA with an 8-node element to study the free vibration of sandwich composite plates. Kucukrendeci [143] developed a hierarchical FEA model for studying nonlinear vibrations of geometrically nonlinear thick plates. Thai et al. [144] applied the FEA to studying the vibration of LCPs on an elastic foundation. Carrera et al. [145] formulated a NS-DSG3 method neglecting the shear correction factor in static, free vibration, and buckling analyses of LCPs. Chakraverty et al. [146] refined the HSDT using single and layerwise theories to study free vibrations of simple supported square anisotropic plates. The Gram-Schmidt technique was employed by Watkins et al. [147] to calculate the fundamental frequencies of plates made from different inhomogenous materials. Honda [148] used the Mauclarin series for calculating the natural frequencies of plates on an elastic foundation. An analytical formulation incorporating spline functions was developed by Iurlaro et al. [149] to determine the parameters of free vibration of curvilinear reinforcing fibers in an LCP. Fazzolari [150] rederived the nonlinear equation of motion included in the refined zig-zag theory to study the statics and dynamics of layered composites. The Ritz formulation and Carerra’s unified formulas were used to study the free vibration response of LCP and FG plates in thermal environments [151,152,153,154]. Xiang and Wei [155] and Shen et al. [156] used Levy’s solution to exactly calculate the buckling and vibration parameters of rectangular multiply spanned Mindlin plates. Chen et al. [157] reformulated Reddy’s HSDT for a dynamic analysis of LCPs with predominant shear deformations in a thermal environment. The 3-D approach and DQEM were used by Malekzadeh et al. [158] to study the free vibrations of cross-ply rectangular LCPs. The DQEM was employed in the FEA in [159, 160] for studying free vibrations of LCPs resting on Winkler’s foundation. Neves et al. [161] made use of Careera’s formulation and a radial basis function for a static and dynamic analysis of thin and thick LCPs. Rodrigues et al. [162] modeled a modified HSDT for FG plates to analyze their static and dynamic responses. Rodrigues et al. [163] and Liu et al [164] used the finite-difference method on the basis of local collocation and radial basis functions and involved Murakami’s zig-zag theory for a vibration analysis of LCPs. Qian et al. [165] used the Fourier series and Galerkin’s approach for determining the free vibration of sandwich panels with square honeycomb cores. Zhu [166] used the meshless local Petroc–Galerkin technique for investigating free and forced vibrations of plates. Wang et al. [167] and Aydogdu [168] used the discrete singular convolution method in the HSDT for an analysis of free vibration of thin plates at different boundary conditions. Amabili [169] put forward a HSDT for bending and stress analysis for LCPs with up to five degrees of freedom. Aghababei [170] presented a comparative analysis of nonlinear forced vibrations of isotropic and LC plates by using the CLPT, FSDT, and HSDT. Zhang et al. [171] formulated a third-order HSDT using Eringen’s nonlocal linear elasticity theory to examine the minor and quadratic variations of shear strains and shear stresses across the plate thickness. Karama et al. [172] presented an overview of FEAs for LCPs. Thai [173] presented a model for multilayered composite materials based on a kinematic approach to study their bending, vibration, and buckling. Kant [174] presented a Levy-type solution based on the principle of minimum total potential energy to study the buckling of orthotropic plates. Pandya [175] and Levy [176] proposed a FE model for a stress analysis of LCPs using the shear deformation theory and found that the displacement field was quadratic in nature. Stein [177], Touratier [178], Shimpi [179], and Soldatos [180] expressed the displacement as the component of a trigonometric function of shear strain. Shimpi [181] assumed that the displacement field is hyperbolic in nature, but the displacement in the thickness direction was assumed constant. Shimpi et al. [78] modified the FSDT and excluded the shear strain. Later, they considered the shear strain [182] to calculate the bending and shearing displacements [183, 184] for thick plates. Improved and generalized models for the displacement field using trigonometric functions (only in the length and width directions) are presented in [59, 185,186,187,188]. Xiang et al. [189] used the displacement as a sine function of shear strains in the longitudinal and lateral directions. Later, the displacement field was assumed to be hyperbolic [186]. In the first case, the displacements in the thickness direction were assumed as constant and integral parts of bending and shear deformations. More recently, the displacement in the thickness direction has been taken quadratic. Daouadji et al. [190] simplified the displacement field for calculating an n th-order shear deformation of plates. Zenkour et al. [191] again modified the trigonometric displacement function in the length and width directions using four variables (longitudinal and transverse displacements). Bessaim [192] used the displacement as a sine function of shear strain and a cosine function of displacement in the thickness direction. The field to hyperbolic sinusoidal and cosinusoidal forms was used by Thai [193]. Thai et al. [194] used a discrete model of HSDT to define the displacement field. Later, the shear deformation field was modified to a hyperbolic sinusoidal form by incorporating bending [195]. They simplified the displacement field to a cubic form [194]. Trigonometric sine and cosine function were used to express displacement fields in [192, 196]. Zhang [197] used HSDTs to study the dynamic behavior of damaged LCPs. Song et al. [198], Mahi et al. [199], and Phung-Van et al. [200] modified Reddy’s theory to a cubic form for studying the vibration of CNT-reinforced composites, graphene nanoplatelets, FG composite plates, and isotropic sandwiched composite plates, respectively. An isogeometric analysis with a modified HSDT approach was used to study LCPs [199, 201] and FG plates [200]. Bousahla et al. [202] employed a refined hyperbolic form of HSDT to analyze vibrations of LCPs. Choe et al. [203] generalized the displacement equations of HSDT by considering the local force vectors. Sayyad and Ghugal [60] proposed a simple form of HSDT along with a numerical calculation. Narayan et al. [204] used the multisegment partitioning technique in the HSDT to simplify the boundary condition of a shell for a relevant formulation of the displacement field. Abdelmalek et al. [205] considered the variable stiffness of a LCP by a spatial distribution model in the FEA for studying its thermal buckling behavior. Kumar et al. [206] formulated a temperature- and moisture-dependent micromechanical model for an n th-order HSDT taking into account the parabolic distribution of the transverse shear strain. Khiloun et al. [207] proposed two new HSDTs for FGMs using a meshless technique in the FEA. Mohammadzadeh et al. [208] proposed a simple form of HSDT using Hamilton’s principle for a modal study of FG plates. Kulikov et al. [209] analyzed the nonlinear dynamics of an FG sandwich plate using the Runge–Kutta method. Altenbech et al. [210] employed a hybrid mixed four-node finite element to analyze FG plates. Vasiliev [64] published a detailed presentation of a sixth-order plate theory. Altenbech et al. [211] and Zhavoronok [212] modified the theories of plates and shells incorporating surface stresses into them. Piskunov [213] used the 3-D reduction technique and developed a shell model using the Lagrangian density and other boundary conditions to formulate a Vekua-type shell model. Neves et al. [214] developed a higher-order theory to obtain a stress–strain relationship for shearing and compressive loads. Piskunov and Rasskazov [66] implemented the FE method and approximated nonclassical 3-D theories by a 2-D model.
2. Formulation of Displacement Fields
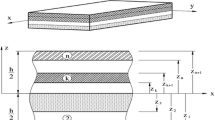
Kirchhoff [1] formulated his theory of plates in 1850. He considered the displacements of a plate as functions of two coordinates, neglected the transverse one, and assumed that the 3-D displacement field can be expressed as a 2-D one. Later Reissner [15] and Mindlin [30] abandoned the Kirchhoff’s assumption and assumed that the normal to the midsurface of plates remains during their deformation unchanged, but not necessarily perpendicular to the midsurface of thick plates. Mindlin assumed that the displacement in the thickness direction is linear and the thickness of plates is unchanged, whereas Reissner reasoned that the stress in the thickness direction varies quadrically in nature. Later, various researchers modified the theories by introducing various assumptions. The displacement fields of existing plate theories can be summarized as follows (see Fig. 1):

Displacement of the midsurface of a thin plate in the CLPT and FSDT [77].
CLPT
FSDT
SSDT
TSDT
Nth order shear deformation theory
The displacement fields stated by Eqs. (4) and (5) have a polynomial form, but they can be modified to other forms depending upon the assumptions made and can be reformulated in parabolic, hyperbolic, trigonometric, and other ones. Examples of displacement fields adopted by different researchers are presented in Table 1.
3. Constitutive Relations
According to Reddy’s theory, the generalized displacement field for an orthotropic laminate having k layers can be written as
For linear variations of displacements across the plate thickness, the functions for ϕ are given by
where \( {\psi}_1^n=1-\frac{\overline{z}}{h_k},\mathsf{and}\;{\psi}_2^n=\frac{\overline{z}}{h_k},o\le \overline{z}\le {h}_n. \)
In some cases, displacement fields are assumed quadratic, namely,
where
The normal strains associated with the displacement field for an n th-order displacement are
For a composite plate with k layers, the assembled stress–strain equation is written as
Equation (11) in the matrix form is
whereQij are the stiffness coefficients of laminate layers.
For thin plates, neglecting the stresses and strains across its thickness, Eq. (12) can be reduced to a 2D form, namely,
The normal and shear strains in the x, y, and z directions are
Assuming bending and shearing of the plate, the matrix strains can be expressed in terms of displacement as
where g(z) = 1− f′ (z) and f (z) is a shape function.
3.2 Kinematics equations
According to the principle of virtual work, the normalized strain energy in the plate is given by
In term of stress resultants, the normalized strain energy is expressed as
For an orthotropic plate, the stress resultants are shown in Fig. 2, and they are determined as

Stress resultants in beam cross section.
For a laminated orthotropic plate, the stress resultants in terms of total strain are expressed as
According to Hamilton’s principle, the equations of motions based on the first variation of Langragian can be obtained as follows:
Using appropriate boundary conditions, the displacements are given by
Inserting them into the Langragian equation, the folowing equation for vibration characteristics is obtained:
4. Comparative Results of Plate Theories
4.1 Shape functions
In this review, all models of LCPs are categorized. The current work is intended to clear up the ability of different plate theories to predict the influence of transverse shear. To get effective results, the HSDT can be used. The variations of displacement field and shear strains in the CLPT, FSDT, and HSDT are illustrated in Fig. 3. Computation of shear strains and stresses in thethe 3-D elasticity formulation (Eqs. (11)-(22)) is difficult and time-consuming due to the great number of parameters. Therefore, the shear and wrapping effects are included in the general formulations of HSDT. The transverse displacements of plates are described using a shape function. The shape functions adopted by different researchers are presented and compared in Table 1. The variations of displacement fields across the plate thickness in different plate theories with various shape functions are shown (Fig. 4).

Variation of transverse displacements of plates in different plate theories.

Variation of shape function f(z) across the thickness z/h of plates in different plate theories.
4.2 Static analysis
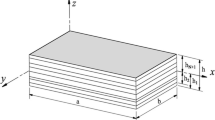
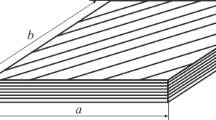
A static analysis of results for LCPs found by different shear deformation theories were based on literature data. Square LCPs with material property E1 = 174.6 GPa, E2 = 7 GPa, G = 3.5 GPa and ν =0.25 [188] and different aspect ratios are subjected to uniform loads. The central deflections and stresses are taken in the nondimensional form
Figure 5 a shows the nondimensional central deflections \( \overline{w} \) of plates subjected to a uniform load q vs. aspect ratio a/h based on different plate theories. The normal \( {\overline{\sigma}}_{xx} \) and shear \( {\overline{\tau}}_{xz} \) stresses as functions of a/h are presented in Fig. 5 b, c.

(a) Nondimensional central deflection \( \overline{w} \) of the plate vs. aspect ratio a/h. (b) Normal stress \( {\overline{\sigma}}_{xx} \) vs. aspect ratio a/h. (c) Shear stress \( {\overline{\tau}}_{xz} \) vs. aspect ratio a/h. (d) Nondimensional central deflection w under a uniform load q. (e) Normal stress \( {\overline{\sigma}}_{xx} \) vs. load q. (f): Shear stress \( {\overline{\tau}}_{xz} \) vs. load q.
Fig. 5 d, f shows the nondimensional central \( \overline{w} \) and the normal \( {\overline{\sigma}}_{xx} \) and shear \( {\overline{\tau}}_{xz} \) stresses as functions of the uniform load q according to different theories.
4.3 Dynamic analysis
The natural dimensionless frequencies of plates with various aspect ratios given by different shear deformation theories are presented in Table 2. The ratio of elastic moduli E1/E2 was kept fixed at 20. The nondimensional fundamental frequency \( \overline{\omega} \) was calculated by a simplified Eq. (31), namely,
Figure 6 shows the nondimensional natural frequency \( \overline{\omega} \) as a function of aspect ratio a/h. It is seen that the natural frequencies of thin to moderately thick plates with a high aspect ratio do not depend on plate theory assumptions. The decrease in the natural frequency with increasing aspect ratio is a usual phenomenon caused by significant losses in the plate stiffness. This is illustrated in Fig. 6.

Nondimensional natural frequency \( \overline{\omega} \) vs. aspect ratio a/h.
5. Conclusions
In this investigation, different plate theories used for static and dynamic analyses of LCPs have been reviewed and analyzed.
For thin to moderately thick plates, the CLPT and FSDT are used to simplify the equation of motions and to find exact solutions. In these theories, shear correction factors are neglected, and the distribution of shear strain is assumed linear. CLT and FSDT are efficient and economical in predicting the total response of laminates rather than the local responses due to the presence of such local defects as notches, holes, grooves, and steppings. However, it is reported that the values of stresses components derived from the plate theories are not so accurate than those given by exact elasticity theory solutions. It is found that the mean square error depends on plate thickness [71, 72].
In some cases, to minimize the variation of results, shear correction factors are introduced into the FSDT.
It the plate thickness is great enough to cause rotational deformations, the shear strain is included in the displacement equation and the displacement field is formed as in the HSDT, where the distribution of shear stress and strain is assumed parabolic, hyperbolic, or trigonometric. But the unknown parameters in the displacement functions are reliant on the plate thickness. HSDTs with a greater number of unknown variables are more effective.
Plate theories rarely take into account the distributions of transverse stresses and strains distribution across the plate thickness; therefore, it is also important to address the exact static and dynamic behavior of LCPs.
• New theories have to be developed for LCPs based on old fundamental solution methods, which can result in a united approach to the analysis of LCPs.
• The HSDTs using trigonometric functions for shear deformations need further investigations.
• The FEA is the most widely used method, as reported in the literature.
• The meshless method is a reliable alternative to the FEA, irrespective of plate thickness. Computations in it are based on 3-D equilibrium equations and give rather accurate results. However, they are very laborious due to the involvement of many variables, depending on the number of layers in a LCP.
• To minimize this difficulty, the shear (ws) and warping (wb) are included directly in formulations.
• Linear analyses of free vibrations of LCPs are more common than nonlinear ones.
• From the comparison of numerical models for static and dynamic analyses, the following conclusions can be drawn.
• The central deflections of plates calculated by the CLPT are smaller than those given by the FSDT and other forms of HSDT.
• The distribution of normal stresses is linear in the CLPT, irrespective of aspect ratios.
• The nondimensional normal stress increases with growing load, but the shear stress decreases.
• The natural frequency of LCPS with high aspect ratios (of thin plates) is constant irrespective of the theory used for computation.
Advantages of HSDT
• The results obtained for the natural frequencies, deflections, stresses, and strains are more real due to the use of higherorder polynomials.
• The inclusion of shear stress and strain is feasible.
• The geometrical nonlinearity in the structures can be considered.
• A reduced integration is not required to obtain acceptable results.
• The distribution of shear in beam profile can be designed and modeled according to the assumptions accepted, i.e., it can be parabolic, hyperbolic, or trigonometric.
• It is useful for determining the local stress-strain state in plates.
• The use of shear correction factors is unnecessary.
• The theories are easy to formulate and they require less computation time.
• In the static analysis, the HSDT yields more accurate and consistent result for the displacement field
Disadvantages of HSDT
• The complexity of computation is rather high due to the inclusion of higher-order polynomial terms to accurately predict result.
• HSDTs with more than five unknown variables are cumbersome and highly demanding.
• For layered solids, the constitutive parameters are specific for each layer, and they have to be incorporated in computations when approximating the constitutive relations and equations of motions.
• The consistency of property variations when using HSDT has not been explored.
• In a dynamic analysis, at high vibrations, the use of HSDT gives a poor approximation for the true shear stress.
• The true shear is maximized at the outer surfaces, which may not be correct in reality.
References
G. R. Kirchhoff, “Uber das gleichgewicht und die bewegung einer elastischen Scheib,” J. Reine Angew. Math. (Crelle’s J), 40, 51-88 (1850).
H. Altenbach and V. Eremeyev, “Thin-walled structural elements: classification, classical and advanced theories, new applications, in: shell-like structures: advanced theories and applications,” Springer International Publishing, CISM International Centre for Mechanical Sciences, 572, 1-62 (2017). https://doi.org/10.1007/978-3-319-42277-0_1
J. W. Strutt, The Theory of Sound, Vol. 1, MacMillan and Co, London (1877).
W. Ritz, “Über eine neue Methode zur lösung gewisser Variations Probleme der Mathema-tischen Physic,” J. für die reine und angewandte Mathematik, 135, 1-61. (1908).
A. E. H. Love, A Treatise on the Mathematical Theory of Elasticity (2nd ed.), University Press, Cambridge (1906).
S. P. Timoshenko, “On the correction for shear of the differential equation for transverse vibrations of prismatic bars,” Philosophical Magazine Series, 6(245), No. 41, 744-746 (1921).
T. von Kármán, Festigkeits Probleme im Maschinenbau, Encyklopädie der Mathematischen Wissenschaften, B. G. Teubner, Leipzig, 311-385 (1910).
K. M. Mushtari and K. Z. Galimov, Nonlinear Theory of Thin Elastic Shells, NSF-NASA, Washington (1961).
A. I. Lurie, Statics of the Thin Elastic Shells [in Russian], Moscow, Gostekhizdat (1947).
A. I. Lurie, On the Static-Geometric Analogy of the Theory of Shells, Muschelishvili Anniversary Volume, Philadelphia, SIAM (1961).
V. Z. Vlasov, General Theory for Shells and its Application in Engineering [in Russian], Moscow, Gostekhizdat (1949).
A. L. Gol’denveizer, “Derivation of an approximate theory of bending of a plate by the methods of asymptotic integration of the equations of the theory of elasticity,” Prikl. Matem, Mekh, 26, No.4, 1000-1025 (1962).
A. L. Gol’denveizer, “Derivation of an approximate theory of shells by means of asymptotic integration of the equations of the theory of elasticity,” Prikl. Matem. Mekh., 27, No. 4, 903-924 (1963).
A. M. A. Van der Heijden, On modified boundary conditions for the free edge of a shell, Ph. D. Thesis, TH Delft, Delft (1976).
E. Reissner, “On the theory of bending of elastic plates,” J. of Mathematics and Physics, 23, 184-191 (1944).
E. Reissner, “The effect of transverse shear deformation on the bending of elastic plates,” J. of Applied Mechanics, 12, No. A, 69-77 (1945).
E. Reissner, “On bending of elastic plates,” Quarterly of Applied Mathematics, 5, 55-68 (1947).
E. Reissner, “On a variational theorem in elasticity,” J. of Mathematics and Physics, 29, 90-95 (1950).
E. Reissner and Y. Stavsky, “Bending and stretching of certain types of heterogeneous aelotropic elastic plates,” J. of Applied Mechanics, 28, 402-408 (1975).
E. Reissner, “Reflection on the theory of elastic plates,” Applied mechanics review, 38, No.11, 1453-1464 (1985).
L. H. Donnel, Beams, Plates, and Shells, Engineering societies monographs series, McGraw-Hill, New York (1976).
K. H. Lo, R. M. Christensen, and E. M. Wu, “A higher-order theory of plate deformation,” J. Appl. Mech. 44, 663-676 (1977).
K. H. Lo, R. M. Christensen, and E. M. Wu, “Stress determination for higher-order plate theory,” Int. J. Solids Struct., 14, 655-662 (1978).
K. Vijayakumar and G. K. Ramaiah, “Analysis of vibration of clamped square plates by the Rayleigh-Ritz method with asymptotic solutions from a modified Bolotin Method,” J. of Sound and Vibration, 56, No. l, 127-135 (1978).
T. Lewinski, “A note on recent developments in the theory of elastic plates with moderate thickness,” Eng. Trans., 34, No. 4, 531-542 (1986).
T. Lewinski, “On refined plate models based on kinematical assumptions,” Ingenieur Arch., 57, No. 2, 133-146 (1987).
J. Blocki, “A higher-order linear theory for isotropic plates-i, theoretical considerations,” Int. J. Solids Struct., 29, No.7, 825-836 (1992).
R. Kienzler, “On consistent plate theories,” Arch. Appl. Mech. 72, 229-247 (2002). https://doi.org/10.1007/s00419-002-0220-2
M. Batista, “The derivation of the equations of moderately thick plates by the method of successive approximations,” Acta Mech., 210, 159-168 (2010).
R. D. Mindlin, “Influence of rotary inertia and shear on flexural motions of isotropic elastic plates,” J. of Applied Mechanics Transactions of the ASME, 18, 31-38(1951).
I. N. Vekua, “On one method of calculating prismatic shells,” Trudy Tbilis. Mat. Inst., 21, 191-259 (1955).
I. N. Vekua, Shell Theory: General Methods of Construction, Advanced Publishing Program, Pitman Advanced Publishing Program, Boston-London-Melbourne (1985).
V. V. Novozhilov, The Theory of Thin Shells, Noordhoff, Groningen (1959).
P. M. Naghdi, “The theory of shells and plates,” In S. Flügge (Ed.), Handbuch der Physik, Springer, VIa/2, New York, 425-640 (1972).
S. A. Ambarcumyan, Theory of Anisotropic Plates: Strength, Stability, and Vibrations, Hemispher Publishing, Washington (1991).
P. A. Zhilin, “Mechanics of deformable directed surfaces,” International J. of Solids and Structures, 12, 635-648 (1976).
P. A. Zhilin, “On the theories of Poisson and Kirchhoff from the point of view of modern plate theories,” Mekhanika Tverdogo Tela, 3, 49-64 (1992).
K. Vijayakumar, “Poisson–Kirchhoff paradox in flexure of plates,” Technical Notes, American Institute of Aeronautics and Astronautics, 26, No. 2, 247-249 (1988).
H. Altenbach, “Eine direkt formulierte lineare Theorie für viskoelastische Platten und Schalen,” Ing.-Arch., 58, 215-228 (1988).
J. Altenbach, H. Altenbach, and V. A. Eremeyev, “On generalized Cosserat-type theories of plates and shells: a short review and bibliography,” Arch of Appli Mech., 80, No. 1, 73-92 (2010).
K. E. Kurrer, The History of the Theory of Structures, From Arch. Analysis to Computational Mechanics, Berlin: Ernst & Sohn (2008).
T. Léwinski, “On refined plate models based on kinematical assumptions,” Ing.-Arch., 57, 133-146 (1987).
K. H. Lo, R. M. Christensen, and E. M. Wu, “A higher-order theory of plate deformation, part 1: Homogeneous plates,” J. of Applied Mechanics Transactions of the ASME, 44, 663-668 (1977).
G. Maugin, Continuum Mechanics through the Twentieth Century, Springer, Cham (2013).
P. M. Naghdi, The theory of shells and plates, in S. Flügge (Ed.), Handbuch der Physik, Springer, VIa/2, New York, 425-640 (1972).
V. Panc, Theories of Elastic Plates, Leyden: Nordhoff Int. Publ, (1975).
J. N. Reddy, Mechanics of Laminated Composite Plates: Theory and Analysis, 2nd ed. CRC Press, Boca-Raton (2004).
S. P. Timoshenko, History of Strength of Materials, McGraw-Hill, New York (1953).
I. Todhunter and K. Pearson, A History of the Theory of Elasticity and of the Strength of Materials: from Galilei to Lord Kelvin, New York-Dover (1960).
G. Jaiani and P. Podio-Guidugli, IUTAM Symposium on relations of shell, plate, beam and 3d models, Proceedings, Tbilisi, Georgia, Springer Science & Business Media, 9 (2007).
H. Altenbach, “Theories for laminated and sandwich plates, a review,” Mech Compos Mater., 34, No. 3, 243-152 (1998).
Y. M. Ghugal and R. P. Shimpi, “A review of refined shear deformation theories of isotropic and anisotropic laminated plates,” J. Reinf. Plast Compos., 20, 255-272 (2001).
E. Carrera, “Historical review of zig-zag theories for multilayered plates and shells,” Appl Mech Rev., 56, 65-75 (2003).
J. N. Reddy and R. A. Arciniega, “Shear deformation plate and shell theories: from Stavsky to present,” Mech Adv Mater Struct., 11, 535-82 (2004).
J. N. Reddy, Theory and Analysis of Elastic Plates and Shells, 2nd ed, CRC Press, Boca-Raton (2007).
T. Kant and K. Swaminathan, “Estimation of transverse/ interlaminar stresses in laminated composites – a selective review and survey of current developments,” Compos. Struct., 49, 65-75 (2000).
C. Mittelstedt and W. Becker , “Interlaminar stress concentrations in layered structures: Part I-A, Selective literature survey on the free-edge effect since 1967,” J. Compos Mater, 38, No.12, 1027-1062 (2004).
K. M. Liew, Y. Xiang and S. Kitipornchai, “Research on thick plate vibration: a literature survey,” J. of Sound and Vibr., 180, No. 1, 163-176 (1995).
J. L. Mantari, A. S. Oktem and C. G. Soares, “Static and dynamic analysis of laminated composite and sandwich plates and shells by using a new higher-order shear deformation theory,” Compos. Struct., 94, 37-49 (2011).
A. S. Sayyad and Y. M. Ghugal, “On the free vibration analysis of laminated composite and sandwich plates: A review of recent literature with some numerical results,” Comp. Stru., 129, 177-201 (2015).
K. Vijayakumar, “New look at Kirchhoff’s theory of plate,” AIAA J., 47, No.4, 1045-1046 (2009).
K. Vijayakumar, “Review of a few selected theories of plates in bending,” Int. Sch. Res. Notices, 291-478, (2014). https://doi.org/10.1155/2014/291478
K. Vijayakumar, “A relook at Reissner’s theory of plates in bending,” Arch Appl. Mech., 81, 1717-1724 (2011).
V. V. Vasiliev, “Modern conceptions of plate theory,” Comp. Struct., 48, 39-48 (2000).
J. Altenbech and G. I. Mikhasev, “Shell and membrane theories in mechanics and biology from macro to nano scale structures,” Adv. Struct. Materials, 45 (2014).
V. G. Piskunov, A. O. Rasskazov, “Evolution of the theory of laminated plates and shells,” International Applied Mechanics, 38, 135-166 (2002).
H. Altenbach and V. Eremeyev, “Thin-walled structural elements: classification, classical and advanced theories, new applications, in: shell-like structures: advanced theories,” CISM International Centre for Mechanical Sciences, 572 (2017). https://doi.org/10.1007/978-3-319-42277-0_1
S. Krenk, “Theories for elastic plates via orthogonal polynomials,” J. of Appl. Mech., 48, 900-904 (1981).
J. N. Reddy, “A simple higher-order theory for laminated composite plates,” J. of Appl. Mecha. Trans. of the ASME, 51, No.4, 745-752 (1984).
A. V. Krishna Murty and S. Vellaichamy, “Higher-order theory of homogeneous plate flexure”, AIAA J., 26, No.6, 719-725 (1988).
R. P. Nordgren, “A bound on the error in plate theory,” Quarterly of Appl. Math., Jan, 587-595 (1971).
R. P. Nordgren, “A bound on the error in plate theory,” Quarterly of Appl. Math., 551-556 (1972).
A. K. Noor, “Free vibrations of multilayered composite plates,” AIAA J., 11, No.2 (1973).
W. Wang and M. X. Shi, “Thick plate theory based on general of elasticity,” Acta Mech., 123, 27-36 (1997).
K. Vijayakumar, “On a sequence of approximate solutions: bending of a simply supported square plate,” Int. J. Adv. Struct. Eng., 5, No. 18, 1-10 (2013).
J. N. Reddy and Jr D. H. Robbins, “Theories and computational models for composite laminates,” Appl. Mech. Rev, 47, 147-69 (1994).
D. S. Liu and X. Y. Li, “An overall view of laminate theories based on displacement hypothesis,” J. Compos Mater, 30, 1539-61 (1996).
R. P. Shimpi and H. G. Patel, “Free vibrations of plate using two variable refined plate theory,” J. of S. and Vibr., 296, No. 4/5, 979-999, (2006).
M. Ebrahimi and A. Rastgo, “An analytical study on the free vibration of smart circular thin FGM plate based on classical plate theory,” Thin-Walled Struct., 46, No. 12, 1402-1408 (2008).
E. Carerra and S. Brischetto, “Analysis of thickness locking in classical, refined and mixed multilayered plate theories,” Comp. Struct., 82, No. 4, 549-562 (2008).
M. Mohammadi, A. R. Saidi, and E. Jomehzadeh, “Levy solution for buckling analysis of functionally graded rectangular plates,” Appli. Comp. Mater. 17, No. 2, 81-93 (2009).
R. Ansari, A. Shahabodini, and H. Rouhi, “Prediction of the biaxial buckling and vibration behavior of graphene via a nonlocal atomistic-based plate theory,” Comp. Struct., 95, 88-94 (2013).
P. Malekzadeh and M. Shojaee, “Free vibration of nanoplates based on a nonlocal two-variable refined plate theory,” Comp. Struct., 95, 443-452 (2013).
A. Mahi, E. A. A. Bedia, and A. Tounsi, “A new hyperbolic shear deformation theory for bending and free vibration analysis of isotropic, functionally graded, sandwich and laminated composite plates,” Appl. Math. Modelling, 39, No. 9, 2489-2508 (2015).
J. N. Reddy, J. Jani Romanoff, and J. Antonioloya, “Nonlinear finite element analysis of functionally graded circular plates with modified couple stress theory,” European J. of Mechanics - A/Solids, 56, 92-104 (2016).
Y. Zhang, L. W. Zhang, K. M. Liew, and J. L. Yu, “Buckling analysis of graphene sheets embedded in an elastic medium based on the kp-Ritz method and nonlocal elasticity theory,” Eng. Analy. with Boundary Elements, 70, 31-39 (2016).
V. N. V. Do and C. H. Thai, “A modified Kirchhoff plate theory for analyzing thermomechanical static and buckling responses of functionally graded material plates,” Thin-Walled Struct., 117, 113-126 (2017).
P. V. Joshi, A. Gupta, R. Salhotra, A. M. Rawani, and G. D. Ramtekkar, “Effect of thermal environment on free vibration and buckling of partially cracked isotropic and FGM micro plates based on a non classical Kirchhoff’s plate theory: An analytical approach,” Int. J. of Mech. Sci., 131/132, 155-170 (2017).
X. F. Li and K. Y. Lee, “Nonclassical axisymmetric bending of circular Mindlin plates with radial force,” Meccanica, 54, No. 10, 1623-1645 (2019).
J. M. Whitney and N. J. Pagano, “Shear deformations in heterogeneous anisotropic plates,” J. of Appli. Mech., 37, 1031-1036 (1970).
C. T. Sun and J. Whitney, “Theories for the dynamic response of laminated plates,” AIAA J., 11, No. 7, 1038-1039 (1973).
K. M. Liew, Y. Xiang, and S. Kitipornchai, “Research on thick plate vibration: a literature survey”, J. of Sound and Vibration, 180, No. 1, 163-176 (1995).
J. N. Reddy and T. Kuppusamy, “Natural vibrations of laminated anisotropic plates,” J. of Sound and Vibr., 94, No.1, 63-69 (1984).
J. N. Reddy, “A generalization of 2-D theories of laminated composite plates,” Comm. in Appl. Numerical Methods, 3, 173-180 (1987).
J. N. Reddy, “On the generalization of displacement-based laminate theories,” Appl. Mech. Rev., 42, No. 11S, 213-222 (1989).
H. Murakami, “Laminated composite plate theory with improved inplane responses,” J. Appl. Mech., 53, No. 3, 661-666 (1986).
K. Chandrashekhara, K. Krishnamurthy and S. Roy, “Free vibration of composite beams including rotary inertia and shear deformation,” Comp. Struct., 14, No.4, 269-279 (1990).
R. Averill and J. N. Reddy, “Behaviour of plate elements based on the first-order shear deformation theory,” Eng. Comput., 7, No. 1, 57-74 (1990).
M. Touratier, “An efficient standard plate theory,” Int. J. of Eng. Sci., 29, No. 8, 901-916 (1991).
K. D. Jonnalagadda, G. E Blandford, and T. R. Tauchert, “Piezo thermo elastic composite plate analysis using first-order shear deformation theory,” Comput. & Struct., 51, No. 1, 79-89 (1994).
M. Eisenberger, H. Abramovich, and O. Shulepov, “Dynamic stiffness analysis of laminated beams using a first-order shear deformation theory,” Comp. Struct., 31, No. 4, 265-271 (1995).
Y. Qi and N. F. Knight Jr, “A refined first-order shear-deformation theory and its justification by plane strain bending problem of laminated plates,” Int. J. of Solids and Struct., 33, No. 1, 49-64 (1996).
S. Wang, “Free vibration analysis of skew fibre-reinforced composite laminates based on first-order shear deformation plate theory,” Compu. & Struct., 63, No. 3, 525-538 (1997).
N. F. Knight Jr and Y. Qi, “On a consistent first-order shear-deformation theory for laminated plates,” Compos. Part B: Eng., 28, No. 4, 397-405 (1997).
R. Rolfes, A. K. Noor, and H. Sparr, “Evaluation of transverse thermal stresses in composite plates based on first-order shear deformation theory,” Comp. Methods in Appl. Mech. and Engin., 167, No. 3/4, 355-368 (1998).
R. Tanov and A. Tabiei, “A simple correction to the first-order shear deformation shell finite element formulations,” Finite Elements in Analysis and Design, 35, No.2, 189-197 (2000).
F. Auricchio and E. Sacco, “Refined first-order shear deformation theory models for composite laminates,” ASME. J. Appl. Mech., 70, No.3, 381-390 (2003).
P. H. Wen, M. H. Aliabadi, and A. Young, “Large deflection analysis of Reissner plate by boundary element method,” Compos. Struct., 83, No.10/11, 870-879 (2005).
W. Yu, “Mathematical construction of a Reissner–Mindlin plate theory for composite laminates,” International J. of Solids and Struct., 42, No.26, 6680-6699 (2005).
R. P. Shimpi, H. G. Patel, and H. Arya, “New first-order shear deformation plate theories,” ASME J. Appl. Mech.,74, 523-533 (2007).
T. K. Nguyen, K. Sab, and G. Bonnet, “First-order shear deformation plate models for functionally graded materials,”, Compos. Struct., 83, No.1, 25-36 (2008).
J. N. Reddy, “Nonlocal nonlinear formulations for bending of classical and shear deformation theories of beams and plates,” Int. J. of Eng. Sci., 48, No.11, 1507-1518 (2010).
H. M. Ma, X. L. Gao, and J. N. Reddy, “A nonclassical Mindlin plate model based on a modified couple stress theory,” Acta Mech., 220, No. (1/4), 217-235 (2011).
P. Zhu, Z. X Lei, and K. M Liew, “Static and free vibration analyses of carbon nano tube-reinforced composite plates using finite element method with first-order shear deformation plate theory,” Compos. Struct., 94, No.4, 1450-1460 (2012).
H. T. Thai and D. H. Choi, “Simple first-orders shear deformation theory for laminated composite plates,” Compos. Struct., 106, 754-763 (2013).
H. T Thai, T. K Nguyen, T. P. Vo, and J. Lee, “Analysis of functionally graded sandwich plates using a new first-order shear deformation theory,” European J. of Mechanics - A/Solids, 45, 211-225 (2014).
J. L. Mantari and M. Ore, “Free vibration of single and sandwich laminated composite plates by using a simplified FSDT,” Compos. Struct., 132, No. 15, 952-959 (2015).
S. Liu, T. Yu and T. Q. Bui, “Size effects of functionally graded moderately thick microplates: A novel nonclassical simple-FSDT iso-geometric analysis,” European J. of Mechanics - A/Solids, 66, 446-458 (2017).
R. Rikards, A. Chate, and O. Ozolinsh, “Analysis for buckling and vibrations of composite stiffened shells and plates,” Compos. Struct., 51, 361-70 (2001).
A. R. Setoodeh and G. Karami, “A solution for the vibration and buckling of composite laminates with elastically restrained edges,” Compos. Struct., 60, 245-53 (2003).
P. V. Hull and G. R Buchanan, “Vibration of moderately thick square orthotropic stepped thickness plates,” Appl Acoust., 64, 753-763 (2003).
M. T. Ahmadian and M. S. Zangeneh, “Forced vibration analysis of laminated rectangular plates using super elements,” Sci. Iran., 10, No. 2, 260-275 (2003).
Y. M. Desai, G. S. Ramtekkar, and A. H. Shah, “Dynamic analysis of laminated composite plates using a layer-wise mixed finite element model,” Compos. Struct., 59, 237-249 (2003).
A. H. Sheikh, P. Dey, and D. Sengupta, “Vibration of thick and thin plates using a new triangular element,” ASCE J Eng Mech., 129, 1235-44 (2003).
A. Chakrabarti and A. H. Sheikh, “A new triangular element based on higher-order shear deformation theory for flexural vibration of composite plates,” Int. J. Struct. Stab. Dyn., 2, No. 2, 163-184 (2002).
A. Chakrabarti and A. H. Sheikh, “Vibration of imperfect composite and sandwich laminates with inplane partial edge load,” Compos. Struct., 71, No. 2, 199-209 (2005).
A. Chakrabarti and A. H. Sheikh, “Vibration of laminated faced sandwich plate by a new refined element,” ASCE J. Aerosp. Eng., 17, No. 3, 123-134 (2005).
M. K. Singha and M. Ganapathi, “Large amplitude free flexural vibrations of laminated composite skew plates,” Int. J. Nonlinear Mech., 39, 1709-1720 (2005).
S. Latheswary, K. V. Valsarajan, and Y. V. K. S. Rao, “Free vibration analysis of laminated plates using higher-order shear deformation theory,” J. IEI (India), 85, 18-24 (2004).
R. C. Batra and S. Aimmanee, “Vibrations of thick isotropic plates with higher-order shear and normal deformable plate theories,” Compos. Struct., 83, 934-55 (2005).
R. C. Batra, L. F. Qian, and L. M. Chen, “Natural frequencies of thick square plates made of orthotropic, trigonal, monoclinic, hexagonal and triclinic materials,” J. Sound Vib., 270, 1074-86 (2004).
L. C. Shiau and S. Y. Kuo, “Free vibration of thermally buckled composite sandwich plates”, J. Vib. Acoust., 128, 1-7 (2006).
F. Moleiro, C. M. M. Soares, C. A. M. Soares, and J. N. Reddy, “Mixed least-squares finite element models for static and free vibration analysis of laminated composite plates,” Comput. Method Appl. M., 198, 1848-56 (2009).
C. A. M. Soares, F. Moleiro, C. M. M. Soares, and J. N. Reddy, “Layer wise mixed least-squares finite element models for static and free vibration analysis of multilayered composite plates,” Compos. Struct., 92, 2328-38 (2010).
M. Tanveer and A. V. Singh, “Nonlinear forced vibrations of laminated piezo electric plates,” J. Vib. Acoust., 132, 1-13(2010).
S. Y. Kuo and L. C. Shiau, “Buckling and vibration of composite laminated plates with variable fiber spacing,” Compos. Struct., 90, 196-200 (2009).
H. N. Van, N. M. Duy, W. Karunsena, and T. T. Cong, “Buckling and vibration analysis oflaminated composite plate/shell structures via a smoothed quadrilateral flat shell element with inplane rotations,” Compos. Structure, 89, 612-25 (2011).
G. Taj and A. Chakrabarti, “Static and dynamic analysis of functionally graded skew plates,” J. of Eng. Mechanics, 139, No. 7, 848-857 (2013).
M. Manna, “Free vibration of tapered isotropic rectangular plates,” J. Vib. Control, 18, 76-91 (2012).
S. Natarajan and G. Manickam, “Bending and vibration of functionally graded material sandwich plates using an accurate theory,” Finite Elem. Anal. Des., 57, 32-42 (2012).
D. Li, Y. Liu, and X. Zhang, “A layer wise /solid-element method of the linear static and free vibration analysis for the composite sandwich plates,” Composites: Part B., 52, 187-198 (2013).
P. Ribeiro, “A hierarchical finite element for geometrically nonlinear vibration of thick plates,” Meccanica, 38, 115-30 (2003).
I. Kucukrendeci and H. Kucuk, “Vibration analysis of laminated composite plates on elastic foundation,” J. Appl. Sci., 13, No.5, 749-754 (2013).
C. H. Thai, L. V. Tran , D. T. Tran, T. N. Thoi, and H. N. Xuan, “Analysis of laminated composite plates using higherorder shear deformation plate theory and node-based smoothed discrete shear gap method,” Appl. Math Model., 36, 5657-577 (2012).
E. Carrera, F. A. Fazzolari, and L. Demasi, “Vibration analysis of anisotropic simply supported plates by using variable kinematic and Rayleigh–Ritz method,” J. Vib. Acoust., 133, 1-16 (2011).
S. Chakraverty, R. Jindal, and V. K. Agarwal, “Effect of non-homogeneity on natural frequencies of vibration of elliptic plates,” Meccanica, 42, 585-599 (2007).
R. J. Watkins and O. Barton, “Characterizing the vibration of an elastically point supported rectangular plate using eigensensitivity analysis,” Thin-Walled Struct., 48, 327-333 (2009).
S. Honda and Y. Narita, “Natural frequencies and vibration modes of laminated composite plates reinforced with arbitrary curvilinear fiber shape paths,” J. Sound Vib., 331, 180-191 (2012).
L. Iurlaro, M. Gherlone, M. D. Sciuva, and A. Tessler, “Assessment of the refined zigzag theory for bending, vibration, and buckling of sandwich plates: a comparative study of different theories,” Compos. Struct., 106, 777-792 (2013).
F. A. Fazzolari and E. Carrera, “Free vibration analysis of sandwich plates with an isotropic face sheets in thermal environment by using the hierarchical trigonometric Ritz formulation,” Composites: Part B, 50, 67-81 (2013).
F. A. Fazzolari and E. Carrera, “Accurate free vibration analysis of thermomechanically pre/post-buckled anisotropic multilayered plates based on is fined hierarchical trigonometric Ritz formulation,” Compos. Struct., 95, 381-402 (2013).
F. A. Fazzolari and E. Carrera, “Coupled Thermo elastic effect in free vibration analysis of anisotropic multilayered plates and FGM plates by using a variable-kinematics Ritz formulation,” Eur. J. Mech.-A/Solid, 44, 157-174 (2014).
F. A. Fazzolari and J. R. Banarjee, “Axiomatic/asymptotic PVD/RMVT-based shell theories for free vibrations of anisotropic shells using an advanced Ritz formulation and accurate curvature descriptions,” Compos. Struct., 108, 91-110 (2014).
Y. Xiang and G. W. Wei, “Exact solutions for vibration of multi-span rectangular Mindlin plates,” J. Vib. Acoust., 124, 545-551 (2002).
Y. Xiang and G. W. Wei, “Exact solutions for buckling and vibration of stepped rectangular Mindlin plates,” Int. J. Solids Struct., 41, 279-94 (2004).
H. S. Shen, J. J Zheng, and X. L. Huang, “Dynamic response of shear deformable laminated plates under thermomechanical loading and resting on elastic foundations,” Compos. Struct., 60, 57-66 (2003).
W. Q. Chen and C. F. Lue, “3D free vibration analysis of cross-ply laminated plates with one pair of opposite edges simply supported,” Compos. Struct., 69, 77-87 (2005).
P. Malekzadeh, G. Karami, and M. A. Farid, “Semi-analytical DQEM for free vibration analysis of thick plates with two opposite edges simply supported,” Comp Meth. Appl. M., 193, No. 45-47, 4781-96 (2004).
S. Sharma, U. S. Gupta, and P. Singhal, “Vibration analysis of non-homogeneous orthotropic rectangular plates of variable thickness resting on Winkler foundation,” J. Appl. Sci. Eng., 15, No. 3, 291-300 (2012).
A. J. M. Ferreira, E. Carrera, M. Cinefra, and C. M. C. Roque, “Radial basis functions collocation for the bending and free vibration analysis of laminated plates using the Reissner-Mixed variational theorem,” Eur. J. Mech.-A/Solids, 39,104-12 (2013).
A. M. A. Neves, A. J. Ferreira, E. Carrera, M. Cinefra, C. M. C. Roque, and R. M. N. Jorge, “Static, free vibration and buckling analysis of isotropic and sandwich functionally graded plates using a quasi-3D higher-order shear deformation theory and a meshless technique,” Composites: Part B, 44, 657-674 (2013).
J. D. Rodrigues, C. M. C. Roque, A. J. M. Ferreira, E. Carrera, and M. Cinefra, “Radial basis functions–finite differences collocation and a unified formulation for bending, vibration and buckling analysis of laminated plates, according to Murakami’s zig-zag theory,” Compos. Struct., 93, 1613-20 (2011).
R. J. D. Rodrigues, C. M. C. Roque, A. J. M. Ferreira, M. Cinefra, and E. Carrera, “Radial basis functions-differential quadrature collocation and a unified formulation for bending, vibration and buckling analysis of laminated plates, according to Murakami’s Zig-Zag theory,” Comp. and Struct., 90-91,107-115 (2012).
J. Liu, Y. S. Cheng, R. F. Li, and F. T. K. Au, “A semi-analytical method for bending, buckling and free vibration analyses of sandwich panels with square-honeycomb cores,” Int. J. Struct. Stab. Dyn., 10, No. 1, 127-51 (2010).
L. F. Qian, R. C. Batra, and L. M. Chen, “Free and forced vibration of thick rectangular plates by using higher-order shear and normal deformable theory and meshless local Petroc-Galerkin (MLPG) method,” Comp. Model Eng. Sci., 4, 519-34 (2003).
Q. Zhu and X. Wang, “Free vibration analysis of thin isotropic and anisotropic rectangular plates by the discrete singular convolution algorithm,” Int. J. Numer. Methods Eng., 86, No.6, 782-800 (2011).
X. Wang, Y. Wang, and S. Xu, “DSC analysis of a simply supported anisotropic rectangular plate,” Compo. Struct., 94, 2576–84 (2012).
M. Aydogdu, “A new shear deformation theory for laminated composite plates,” Compos. Struct., 89, No. 1, 94-101 (2009).
M. Amabili and S. Farhadi, “Shear deformable versus classical theories for nonlinear vibrations of rectangular isotropic and laminated composite plates,” J. of Sound and Vibr., 320, No. 3, 649-667 (2009).
M. Aghababaei and J. N. Reddy, “Nonlocal third-order shear deformation plate theory with application to bending and vibration of plates,” J. of Sound and Vibr., 326, No. 1, 277-289 (2009).
Y. X. Zhang and C. H. Yang, “Recent developments in finite element analysis for laminated composite plates,” Compos. Struct., 88, 147-157 (2009).
M. Karama, K. S. Afaq, and S. Mistou, “A new theory for laminated composite plate,” Compos. Struct., 223, No. 2, 53-62 (2009).
H. T. Thai and S. E. Kim, “Levy-type solution for buckling analysis of orthotropic plates based on two variable refined plate theory,” Compos. Struct., 93, No. 7, 1738-1746 (2011).
T. Kant and B. S. Manjunatha, “An un-symmetric FRC laminate C3 finite element model with 12 degrees of freedom per node,” Eng. Comp., 5, 300-308 (1988).
B. N. Pandya and T. Kant, “Finite element stress analysis of laminated composite plates using higher-order displacement model,” Compos. Sci. Techn., l32, 137-55 (1988).
M. Levy, “Memoire sur la theorie des plaques elastique planes,” J. Math. Pure Appl., 30, 219-306 (1877).
M. Stein, “Nonlinear theory for plates and shells including effect of shearing,” AIAA J., 24, 1537-1544 (1986).
M. Touratier, “An efficient standard plate theory,” Int. J. Eng. Sci., 29, No. 8, 901-916 (1991).
R. P. Shimpi, H. Arya, and N. K. Naik, “A higher-order displacement model for the plate analysis,” J. Reinf. Plast. Compos., 22, No. 18, 1667-88 (2003).
K. P. Soldatos, “A transverse shear deformation theory for homogeneous monoclinic plates,” Acta Mech., 94, 195-200 (1992).
R. P. Shimpi and A. V. Ainapure, “Free vibration of two-layered cross-ply laminated plates using layer-wise trigonometric shear deformation theory,” J. Reinf. Plast. Compos., 23, No. 4, 389-405 (2004).
R. P. Shimpi, H. G. Patel, and H. Arya, “New first-order shear deformation theories,” J. Appl. Mech., 74, No. 3, 523-33 (2006).
R. P. Shimpi, H. G. Patel, and H. Arya, “Closure: new first-order shear deformation theories,” J. Appl. Mech., 74, No. 4, 523-533 (2007).
Y. M. Ghugal and A. S. Sayyad, “A static flexure of thick isotropic plates using trigonometric shear deformation theory,” J. Solid Mech., 2, No.1, 79-90 (2010).
Y. M. Ghugal and A. S. Sayyad, “Free vibration of thick isotropic plates using trigonometric shear deformation theory,” J. Solid Mech., 3, No. 2, 172-82 (2011).
N. E. Meiche, A. Tounsi, N. Ziane, I. Mechab, and E. A. A. Bedia, “New hyperbolic shear deformation theory for buckling and vibration of functionally graded sandwich plate,” Int. J. Mech. Sci., 53, 237-47 (2011).
J. L. Mantari, A. S. Oktem, and C. G. Soares, “A new trigonometric shear deformation theory for isotropic, laminated composite and sandwich plates,” Int. J. Solids Struct., 49, 43-53 (2012).
A. M. A. Neves, A. J. M. Ferreira, E. Carrera, C. M. C. Roque, M. Cinefra, and R. M. N. Jorge, “Bending of FGM plates by a sinusoidal plate formulation and collocation with radial basis functions,” Mech. Res. Comm., 38, 368-71 (2011).
S. Xiang, Y. X. Jin, Z. Y. Bi, S. X. Jiang, and M. S. Yang, “A nth order shear deformation theory for free vibration of functionally graded and composite sandwich plates,” Compos. Struct., 93, 2826-2832 (2011).
T. H. Daouadji, A. H. Henni, A. Tounsi, and E. A. A. Bedia, “A new hyperbolic shear deformation theory for bending analysis of functionally graded plates”, Model Simul. in Eng., 1-10 (2012). https://doi.org/10.1155/2012/159806
A. M. Zenkour, “Bending of FGM plates by a simplified four-unknown shear and normal deformations theory,” Int. J. Appl. Mech., 5, No. 2, 1-15 (2013).
A. Bessaim, M. S. A. Houari, A. Tounsi, S. R. Mahmoud, and E. A. A. Bedia, “A new higher-order shear and normal deformation theory for the static and free vibration analysis of sandwich plates with functionally graded isotropic face sheets,” J. Sandw. Struct. Mater., 15, No. 6, 671-703 (2013).
H. T. Thai and T. P. Vo, “A new sinusoidal shear deformation theory for bending, buckling, and vibration of functionally graded plates,” Appl. Math. Model, 37, No. 5, 3269-3281 (2013).
C. H. Thai, L. V. Tran, D. T. Tran, T. N. Thoi, and H. N. Xuan, “Analysis of laminated composite plates using higherorder shear deformation plate theory and node-based smoothed discrete shear gap method,” Appl. Math. Model, 36, 5657-5677 (2012).
A. M. Zenkour, “A simple four-unknown refined theory for bending analysis of functionally graded plates”, Appl. Math. Model, 37, 9041-9051 (2013).
F. Tornabene, N. Fantuzzi, M. Bacciocchi, and E. Viola, “Mechanical behavior of damaged laminated composites plates and shells: higher-order shear deformation theories,” Compos. Struct., 189, 304-329 (2018).
L. W. Zhang and B. A. Selim, “Vibration analysis of CNT-reinforced thick laminated composite plates based on Reddy’s higher-order shear deformation theory,” Compos. Struct., 160, 689-705 (2017).
M. Song, S. Kitipornchai, and J. Yang, “Free and forced vibrations of functionally graded polymer composite plates reinforced with graphene nanoplatelets,” Compos. Struct., 159, 579-588 (2017).
A. Mahi, E. A. Adda Bedia, and A. Tounsi, “A new hyperbolic shear deformation theory for bending and free vibration analysis of isotropic, functionally graded, sandwich and laminated composite plates,” Appl. Math. Modeling, 39, No.9, 2489-2508 (2015) .
P. Phung-Van, M. Abdel-Wahab, K. M. Liew, S. P. A. Bordas, and H. Nguyen-Xuan, “Isogeometric analysis of functionally graded carbon nanotube-reinforced composite plates using higher-order shear deformation theory,” Compos. Struct., 123,137-149 (2015).
K. Nedri, N. El Meiche, and A. Tounsi, “Free vibration analysis of laminated composite plates resting on elastic foundations by using a refined hyperbolic shear deformation theory,” Mechanics of Compos. Mater., 49, No. 6, 629-640 (2014).
A. A. Bousahla, M. S. A. Houari, A. Tounsi, and E. A. Adda Bedia, “A novel higher-order shear and normal deformation theory based on neutral surface position for bending analysis of advanced composite plates,” Int. J. of Computational Methods, 11, No. 6, 135-182 (2014).
K. Choe, K. Kim, and Q. Wang, “Dynamic analysis of composite laminated doubly-curved revolution shell based on higher-order shear deformation theory,” Compos. Struct., 225, 111-155 (2019).
D. A. Narayan, M. Ganapati, B. Pradyumna, and M. Haboussi, “Investigation of thermo-elastic buckling of variable stiffness laminated composite shells using finite element approach based on higher-order theory,” Compos. Struct., 211, 24-40 (2019).
A. Abdelmalek, M. Bouazza, M. Zidour, and N. Benseddiq, “Hygrothermal effects on the free vibration behavior of composite plate using nth-order shear deformation theory: a micromechanical approach”, Iranian J. of Science and Technology, Trans. of Mech. Eng., 43, No.1, 61-73 (2019).
R. Kumar, A. Lal, B. N. Singh, and J. Singh, “New transverse shear deformation theory for bending analysis of FGM plate under patch load,” Compos. Struct., 208, 91-100 (2019).
M. Khiloun, A. A. Bousahla, A. Kaci, A. Bessaim, A. Tounsi, and S. R. Mahmoud, “Analytical modeling of bending and vibration of thick advanced composite plates using a four-variable quasi 3D HSDT,” Eng. with Computers, 35, No. 2, 1-19 (2019). https://doi.org/10.1007/s00366-019-00732-1
B. Mohammadzadeh, E. Choi, and D. Kim, “Vibration of sandwich plates considering elastic foundation, temperature change and FGM faces,” Struct. Eng. and Mech., 70, No. 5, 601-621 (2019).
G. M. Kulikov, S. V. Plotnikova, and E. Carrera, “A robust, four-node, quadrilateral element for stress analysis of functionally graded plates through higher-order theories,” J. Mechanics of Adv. Materials and Struct., 25, No. 15-16, 1383-1402 (2017).
H. Altenbach, V. A. Eremeev, and N. F. Morozov, “On equations of the linear theory of shellswith surface stresses taken into account,” Mechanics of Solids, 45, No. 3, 331-342 (2010).
H. Altenbach, V. A. Eremeev, and N. F. Morozov, “Linear theory of shells taking into account surface stresses,” Doklady Physics, 54, No. 12, 531-535 (2009)
S. I. Zhavoronok, “On the variational formulation of the extended thick anisotropic shells theory of I. N. Vekua type,” Procedia Eng., 111, 888-895 (2015).
V. G. Piskunov, V. E Verijinko, S. Adil, and E. B. Summers, “A higher-order theory for the analysis of laminated plates and shells with shear and normal deformation,” Int. J. of Engi. Sci., 31, No. 6, 967-988 (1993).
A. M. A. Neves, A. J. M. Ferreira, E. Carrera, C. M. C. Roque, M. Cinefra, and R. M. N. Jorge, “A quasi-3D hyperbolic shear deformation theory for the static and free vibration analysis of functionally graded plates,” Compos. Struct., 94, 1814-1825 (2012).
N. Grover, B. N. Singh, and D. K. Maiti, “Analytical and finite element modeling of laminated composite and sandwich plates: an assessment of a new shear deformation theory for free vibration response,” Int. J. Mech. Sci., 67, 89-99 (2013).
H. T. Thai and S. E. Kim, “A simple higher-order shear deformation theory for bending and free vibration analysis of functionally graded plates,” Compos. Struct., 96,165-173 (2013).
M. Abualnour, M. S. A. Houari, A. Tounsi, E. A. A. Bedia, and S. R. Mahmoud, “A novel quasi-3D trigonometric plate theory for free vibration analysis of advanced composite plates,” Compos. Struct., 184, 688-697 (2018).
C. H. Thai, A. J. M. Ferreira, M. Abdel Wahab, and H. Nguyen-Xuan, “A generalized layerwise higher-order shear deformation theory for laminated composite and sandwich plates based on isogeometric analysis,” Acta Mechanica, 227, No. 5, 1225-1250 (2017).
N. Grover, B. N. Singh, and D. K. Maiti, “An inverse trigonometric shear deformation theory for supersonic flutter characteristics of multilayered composite plates,” Aerospace Sci. and Technol., 52, 41-51 (2016).
C. H. Thai, H. Nguyen-Xuan, S. P. A. Bordas, H. Nguyen-Xuan, and T. Rabczuk, “Isogeometric analysis of laminated composite plates using the higher-order shear deformation theory,” Mechanics of Adv. Mater. and Struct., 22, No. 6, 451-469 (2015).
Acknowledgement
The authors do hereby acknowledge the facilities and support of the Veer Surendra Sai University of Technology, Department of Production Engineering, Burla, in carrying out this research work. Authors have received no funding from any agency for this work. Special thanks to Dr. P. K. Padhi for his kind support for making the English text grammatically correct. Authors also extended their special thanks to the reviewer for his valuable comments.
Author information
Authors and Affiliations
Corresponding author
Additional information
Russian translation published in Mekhanika Kompozitnykh Materialov, Vol. 56, No. 4, pp. 675-714, July-August, 2020.
Rights and permissions
About this article

Cite this article
Parida, S.P., Jena, P.C. Advances of the Shear Deformation Theory for Analyzing the Dynamics of Laminated Composite Plates: An Overview. Mech Compos Mater 56, 455–484 (2020). https://doi.org/10.1007/s11029-020-09896-0
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11029-020-09896-0