
The problems of using gradient measurements in magnetic exploration are considered. In many cases, to solve various geological problems, information on the intensity of the geomagnetic field and its gradients, as measured by special equipment, is important. The results of the development and construction of a three-component fluxgate magnetometer-gradiometer intended for measuring on the earth’s surface the absolute values of the three components of the geomagnetic field strength vector and the corresponding three components of the gradient are presented. Installation in the device of additional measuring sensors – accelerometers, enables one to calculate the orientation of these vectors in space. The device of the magnetometer-gradiometer is described, its functional diagram and the principle of operation are presented. The set of instrumental errors arising in the manufacture of three-axis systems of fluxgates and accelerometers designed for measuring the components of the geomagnetic field strength and determining the orientation of the device is considered. A method of finding instrument errors and algorithmic correction of information signals that come from measuring sensors is presented. It is shown that this method provides a significant increase in measurement accuracy. Examples of field testing of the device are given. The presented magnetometer-gradiometer can be used to accurately localize tectonic disturbances, low-power zones of magnetic mineralization, previously identified ore bodies and determine the details of their structure.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction. In magnetic exploration, the gradients of a geomagnetic field are understood to be derivatives of the scalar function in given directions, that is, the concept of “gradient” is identified with the concept of “component of the gradient vector.” However, in practice, instead of directional derivatives, one has to operate with finite differences in the values of the elements of terrestrial magnetism, reduced to the size of the base. These values can be found in one of the horizontal directions or vertically. Thus, the value of the gradient is attributed to the point of space located in the middle of the base [1]. Of the entire range of problems of gradiometry, the determination of local inhomogeneities of superweak magnetic fields within the natural variations of the geomagnetic field is of greatest interest. It is also necessary to calculate or measure the gradient in a detailed exploration of deposits with a shallow bed of magnetic rocks for more accurate localization of ore bodies and the solution of other problems associated with the separation of the effects of various objects by the magnetic field. Such measurements are especially important for complex anomalies, when the magnetic fields of large and small bodies overlap one another [2]. In this case, the vertical gradient contains information about the depth of the disturbing object, while the horizontal gradient highlights the boundaries of the object in the horizontal plane of inhomogeneities.
The magnetic field gradient can be measured in two ways:
– using magnetometers, setting them at different heights and relating the resulting measurement difference to a unit of distance between the measurement levels;
– special magnetometers-gradiometers, the design of which allows you to immediately obtain the values of the gradients.
Direct gradient measurements of magnetic field elements have a significant advantage over observations of element values when detecting or indicating relatively small magnetic objects that lie at a depth of no more than 6–7 m from the level of the survey. However, this is only true if the errors in the gradient measurements do not exceed the errors in the measurements of the magnetic field. In addition, this problem is closely related to hardware capabilities [3].
Equipment for measuring magnetic fields and gradients. At present, gradiometer magnetometers have been widely used to measure the gradient ΔT of the full geomagnetic field vector or its vertical component ΔZ [4]. The measurement of the gradient modulus of the vertical component of the magnetic field is the most simple in execution and characterized by the smallest measurement error. But the range of problems that can be solved by the method of three-component gradiometry of the magnetic field, with this method is significantly narrowed.
The low threshold of sensitivity, the presence of a directional pattern, simplicity of design, reliability and high performance have played a paramount role in choosing the type of sensors for constructing magnetometric equipment. At present, magnetometric instruments implemented on fluxgate sensors have found widespread use [5, 6]. There is experience in the creation of two-component magnetometer-gradiometers (Laboratory for Independent Research, site of I. A. Mukhin, http://imlab.narod.ru/M_Fields/Dig_Magn_Grad/Dig_Magn_Grad.htm). When detecting ferromagnetic objects hidden in the surface layers of the Earth and separating complex anomalies, the size of the measuring base of the device is of great importance. The larger the measuring base, the wider the research radius, but the measurement error in this case also increases. Therefore, when designing gradiometers and choosing the size of the measuring base, it is necessary to be guided by the research tasks.
In the Laboratory of Borehole Geophysics of the Institute of Geophysics, Ural Branch of the Russian Academy of Sciences, a working model of the MGP-02 three-component pedestrian magnetometer-gradiometer was developed. This model is intended for measurements on the earth’s surface of the absolute values of the three components of the geomagnetic field vector – vertical Z, horizontal in the instrument plane of inclination of the HX and HY, which is horizontal, orthogonal to HX. In addition, using the developed layout, it is possible to measure the three components of the geomagnetic field gradient. Such a device can be used to more accurately localize previously identified ore bodies and determine the details of their structure. The installation of additional measuring modules – accelerometers, allows not only to measure the vector of the total geomagnetic field, its components and their gradients, but also to calculate the spatial orientation of these vectors.
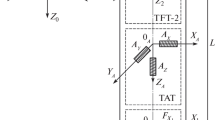
Figure 1 shows a structure diagram of the developed magnetometer-gradiometer. Here I and II are measuring modules (magnetometers), each of which contains two mutually orthogonal sensor systems installed coaxially between each other:

Schematic arrangement of measuring sensors in the magnetometer-gradiometer MGP-02.
– magnetic sensors (fluxgates) X, Y, Z, designed for measuring the components of the geomagnetic field;
– gravity sensors (accelerometers) U1, U2, U3 to determine the orientation of the fluxgates relative to the inclination plane of the device.
The MGP-02 magnetometer-gradiometer has a typical gradiometer structure with two measuring modules identical in characteristics and spaced 150 cm apart.The base size was chosen based on the ratio of the permissible measurement error and the research radius. In Fig. 2 we show a functional diagram of the magnetometer-gradiometer MGP-02 under consideration. This magnetometer operates at a doubled frequency with synchronous detection and a deep negative coupling [7, 8]. The signals of the fluxgates of both measuring modules from the block of primary converters 1 through the switch 2 are fed to the input of the measuring circuit of the magnetometer 4, operating in the mode of temporary separation of channels.

Functional diagram of the magnetometer-gradiometer MGP-02: 1) the block of primary converters; 2) switch; 3) switch; 4) measuring circuit of the magnetometer; 5) accelerometer measurement circuit; 6) analog to digital converter; 7) memory block; 8) shift register; 9) output latch; 10) control block; 11) power supply unit.
Similarly, the signals of the accelerometers through the switch 3 are fed to the input of the measuring circuit of the signals of the accelerometers 5. The circuit of the device contains low-pass filters to eliminate high-frequency vibration signals and a high-resistance voltage follower. Step signals of direct current from the outputs of blocks 4, 5 get to the inputs of an analog- to-digital converter (ADC) 6. This design uses a double integration ADC with a capacitor charge time of 20 ms. This allows you to completely eliminate interference with a frequency of 50 Hz. The output of the ADC in the form of a parallel binary code is supplied to the inputs of the memory unit 7 and is recorded in it. In the reading mode, the parallel binary code is supplied to the shift register 8 and then to the output latch 9, which provides a pause at each data transmission step to synchronize its reception by the computer. The control unit 10 sequences the operation of all units. The power supply unit 11 is connected to the battery installed in the control panel.
The measured signals coming from the fluxgates and accelerometers are functionally related to the spatial orientation angles of the borehole tool body. As mentioned above, the full vector of the geomagnetic field, measured by each sensor system, can be represented by three components: vertical Z; the horizontal in the device inclination plane НX and the horizontal НY, orthogonal to НX. When the instrument rod is installed in a sub-horizontal position, the horizontal components of the magnetic field gradient are measured, while the sub-vertical one measures the vertical components. To determine them in each measuring module, a system of measuring sensors is used, consisting of three orthogonally located rigidly mounted fluxgates and three accelerometers, the directions of the sensitivity axes of which correspond to the sensitivity axes of the fluxgates. The true values of the components of the vector of the geomagnetic field and the angular parameters of the device in the coordinate system attached to the device inclination plane are determined by the following formulas:
where Zax is the measured signal coming from the axial fluxgate; Xm, Ym are the measured signals coming from the X, Y fluxgates; α = arctan(U2/U3) is the angle of rotation of the accelerator system relative to the device inclination plane at a given point (sighting angle); \( \upvarphi =\left\{{\left[\left({U}_2^2+{U}_3^2\right)\right]}^{1/2}/{U}_1\right\}. \)
The angular parameters α and φ of the device are calculated from the readings of the accelerometers U1, U2, U3.
The magnetic azimuth AZ and the modulus of the horizontal component H are calculated using the corresponding formulas from [8]:
Analysis of the influence of instrument device errors on the accuracy of measurements. Development and manufacture of three-component magnetometer-gradiometers using systems for determining the orientation of fluxgates and their design and technological development are inextricably linked with research and development of methods to improve the accuracy of measurements, as well as the use of methods for mathematical correction of instrumental errors [10,11,12,13].
The gravitation channel of the device uses AT-1306 accelerometers (NPO Temp-Avia, Russia), having an operating temperature in the range of –50–120°C, while their conversion coefficient varies in the range 1.105–1.118, and zero maintenance – in the range of 14–7.5·10–3 g. A thermometer is installed in the accelerometer block, whose readings govern the corrections made to the calculated parameters that reduce the temperature errors of the accelerometers by more than 10 times compared with certified performance ratings. Differential fluxgates are used in the magnetic channel of the device. An amorphous alloy 71KNSR developed at the Institute of Metal Physics, Ural Branch of the Russian Academy of Sciences [14], was used as a core. When using core material from one batch, the drift of the zero level of the fluxgate, in the range of operating temperatures of the device, does not exceed ±1.5 nT. The deep negative feedback with which the magnetometer-gradiometer is covered enables a high stability of sensitivity of the fluxgates. In addition, reading the data of the thermometer of the accelerometer block installed in the immediate vicinity of the fluxgates allows temperature corrections to be made to the readings of magnetic sensors. Thus, the design of the device and the introduction of temperature corrections make it possible to obtain high stability of the metrological characteristics of magnetometric and accelerometric channels and to exclude temperature drift.
To determine the temporal drift of the magnetometric channels of the device in the magnetic pavilion of the Arti observatory, bench tests were carried out for 2.5 h at normal temperatures in the screen, as well as in “normal field” conditions. After averaging and introducing corrections, the temporal drift of the components of the geomagnetic field was up to 2 nT in the screen and up to 3 nT in the “normal field.”
A special place in the aggregate of parameters affecting the metrological characteristics of the device is occupied by errors due to its design. In this case, this is a series of design and technological parameters, such as the non-orthogonal orientation of the sensitivity axes of the primary converters with respect to the reference bases of the device, the non-parallel arrangement of the sensitivity axes of the measuring sensors, etc. [15, 16]. Errors characterizing the structural design of the equipment are systematic for each particular instrument and introduce multiplicative noise into the measurement results [17].
In Fig. 3 we show the skew angles of the axes of the measuring sensors arising in the manufacture of three-axis measuring systems of fluxgates and accelerometers, where ƒ1′, ƒ1″ are the angles between the axis of the borehole tool and the sensitivity axis of the accelerometer U1; ƒ2, ƒ3 are the angles of deviation from orthogonality of the axes of the borehole tool and accelerometers U2, U3; ƒ4 ′ , ƒ4″ are the angles between the axis of the borehole tool and the sensitivity axis of the fluxgate Z; ƒ5 is the angle of deviation from the orthogonality of the axes of the borehole tool and the fluxgate Y; ƒ6 is the angle of deviation from the orthogonality of the axes of the borehole tool and fluxgate X; γ1 is the angle of deviation from the orthogonality of the accelerometers U2, U3; γ2 is the angle of deviation from the orthogonality of the fluxgates X, Y; Δα is the angle between the axes of the fluxgate X and the accelerometer U2.

Sources of instrument errors in the production of fluxgate and accelerometer systems.
Tuning was carried out on the UKI-2 inclinometer table installed in a separate magnetic pavilion of the Arti observatory. In the pavilion, all conditions were created for observing the homogeneity of the geomagnetic field in the volume of the gradiometer. The digital magneto-variational stations of the Kvarts-3EM and Kvarts-4 observatories, having a sensitivity of 0.1 nT/division, provided continuous year-round recording of variations of the Earth’s magnetic field components, i.e., its longitudinal X, transverse Y, and vertical component Z. Using a POS-1 proton magnetometer with a standard deviation of less than 0.1 nT and based on the Overhauser effect, the magnitude of the magnetic field vector F was determined. Using Theodolite 3T2KP equipped with a fluxgate sensor for observing the declination angle D and the inclination I of the modulus of magnetic induction vector F, each day we measured the absolute values of these quantities with an accuracy of 10 s. The absolute values of the modulus of the total vector of the geomagnetic field in 2019 were within the range of 56523 nT. To determine the inhomogeneity of the magnetic field in the volume of the magnetometer-gradiometer, we conducted preliminary measurements of the magnetic field with a POS-1 magnetometer. As a result of the measurements, the maximum discrepancies in the absolute values of the magnetic field were 3.5 nT.
In the ideal case, the sensitivity axes of the X, Y, Zax fluxgates and accelerometers U1, U2, U3 should be directed along the axes of the basis of the device body and aligned with each other. In practice, the angles of deviation of the axes of sensitivity of the primary transducers from the axes of the basis of the device can reach 5°. The combination of instrument errors arising in the manufacture of measuring systems with rigidly mounted sensors has a significant impact on the accuracy of measuring the components of the geomagnetic field and determining the orientation of the device.
Methods of tuning a magnetometer-gradiometer. In this work, the authors present a technique developed to determine the output parameters of the primary transducers rigidly fixed in the housing of the borehole tool when tested in a non-magnetic rotary inclinometer table, which provides increased rigidity when installing the device and the accuracy of the azimuth, zenith, and sighting corners. Using a simple algorithmic basis of mathematical correction of signals received from measuring sensors, instrument errors of the device and their influence on the accuracy of measurements are determined.
Each measuring system was set up separately, since the instrument errors of each system are individual. The axis of the device was the axis of the rod, which coincides with the sensitivity axes of the Zax_I, Zax_II fluxgates and the accelerometers U1_I, U1_II (cf. Fig. 1). The main condition for making the tuning work is the uniformity of the magnetic field at the installation site of the inclinometer table.
The essence of the methodology for determining instrument errors in the manufacture of the device is as follows. The device is sequentially oriented in space so that the contribution of each corresponding component of the system of accelerometers or fluxgates takes a certain value at which the influence of instrument errors on it will be maximum (when finding the misalignment angles and non-orthogonality of the axes of the primary transducers) or, conversely, is negligible (when determining the zero signal level and conversion coefficients of the primary converters).
In the measurement process, the parameters Zm, Xm, Ym, U1m, U2m, U3m are recorded. To bring them to true values associated with the coordinate system of the device, we use the transformation formulas of rectangular coordinates. Then, the output parameters of the primary converters will be calculated using the following formulas:
where U1m, U2m, U3m, Xm, Ym, Zm are the readings of the corresponding accelerometers and fluxgates; U10, U20, U30, X0, Y0, Z0 are the zero level offsets of the signals of the primary converters; K1, K2, K3, KX, KY, KZ are the transmission coefficients of the primary converters; ƒ1 ′ , ƒ1″, ƒ2, ƒ3, ƒ4 ′ , ƒ4″, ƒ5, ƒ6, γ1, γ2 are the axis deviation angles of the primary transducers from the bases of the device; αm is the measured line of sight; Δα is the angle between the axes of the X fluxgate and the accelerometer U2.
Determination of the zero level of signals and conversion coefficients of accelerometers and fluxgates. The zero level of the output signal of the measuring sensor is considered to be the error of its readings in the absence of the influence of the measured fields. Zero signals U20, U30 of accelerometers located orthogonally to the axis of the inclinometer magnetometer with a step of 90° are determined by rotating the device around the longitudinal axis. The casing of the device is fixed on the inclinometer table strictly horizontally, the zenith angle φ = 90°. The output value, which is taken from the accelerometer U2 located along the line of the force of gravity, that is, down, will be positive and maximal (U2max(+)). In this case, the reading of the accelerometer U3 orthogonal to it will be close to zero. When the instrument is rotated clockwise 90°, the value of U3, on the contrary, will be as positive as possible (U3max(+)), and the value of U2 will tend to zero. In subsequent turns, the values taken from the accelerometers oriented upwards, that is, against gravity, will be maximally negative and amount to U2max(–) and U3max(–). The distortions of the output parameters of the accelerometers U2, U3, associated with the deviation of their axes from the axes of the basis of the device, will practically have no affect.
The conversion coefficient of the axial accelerometer is conventionally taken as unity; then the coefficients K2, K3 are determined by bringing the level of the output parameters of the accelerometers U2, U3 to the output level of the accelerometer U1. To determine U10 – the zero offset of the axial accelerometer U1 – the device is fixed in the inclinometer table vertically. The maximal positive value U1max(+) corresponds to the position of the device when the axial accelerometer is located in the direction of gravity (φ = 0), and the maximal negative value U1max(–) is obtained when the axial accelerometer U1 is oriented against gravity (φ = 180°). The “zeros” of the accelerometers U20, U30 installed perpendicular to the axis of the borehole device are determined by setting the axis of the device perpendicular to the direction of the gravity vector and its full rotation along the line of sight. We find the “zeros” X0, Y0 of the X and Y fluxgates, coaxial with the accelerometers U2, U3 when setting the axis of the instrument perpendicular to the direction of the geomagnetic field vector and its complete rotation along the target angle α with a step of 90°. Thus, there is a four-position technique. We will calculate the zero level Z0 of the axial fluxgate Z by analogy with the axial accelerometer U1, but in this case we will install the device in the direction and opposite to the direction of the geomagnetic field vector. The conversion coefficients KX, KY, KZ will be preliminarily determined when calibrating the device in calibration rings, where we take signal Zm for the base value. Then we assign the coefficient KZ the value “1,” and we bring the coefficients KX, KY to the coefficient KZ.
All obtained “zeros” and conversion coefficients must be entered into the correction file of the primary corrections.
Determination of misalignment angles and deviations from the orthogonality of the axes of the measuring systems. After calculating the “zeros” and the conversion coefficients, the misalignment angles and deviations from the orthogonal position of the measuring systems are determined. These parameters can be found using the software module, which is part of the instrument software, which enables semi-automatic selection of the values of the angles ƒ1–ƒ6 up to tenths of angular minutes. All conversion coefficients selected in this way, “zeros” and the deviation angles of the measuring systems from the axes of the basis are entered into the correction fi le, which is involved in processing measurements in the operating mode.
Measurement and calculation of secondary corrections. Secondary corrections are calculated according to the results of standard measurements, which are carried out during the axial rotation of the primary transducer blocks in a normal magnetic field with a rigid fastening of the rod in the inclinometer table. The resolution of measurements along the zenith angle is 5°. For each set angle, the device is completely scrolled along the apsidal angle α and through 30° for each azimuth value. In azimuth, there is also a complete revolution of the device with a resolution of 30°, that is, 0, 30, 60, ..., 330°. For each zenith angle, 12 tables are created corresponding to 12 azimuths. After recording the entire data array, secondary corrections are calculated based on the functional independence of the calculated physical parameters from the axial rotation of the device.
The deviation of the measured parameters from theoretical is calculated. Moreover, in all formulas for calculating the components of the geomagnetic field, all previously calculated errors and coefficients recorded in the files of the primary corrections are used. The calculated results are recorded in the secondary correction tables.
After tuning performed at the Arti observatory under conditions of a normal magnetic field on a three-axis inclinometer table UKI-2, it was possible to achieve absolute measurement errors of the components of the geomagnetic field within 5–20 nT. Such values applied to the absolute values of the geomagnetic field on the territory of the observatory constitute 0.01–0.04%. In addition, the position of the vector of the geomagnetic field in space was determined with an accuracy of 0.03°, which is comparable with the observational instrument observations. The achieved measurement accuracy is preserved during measurements of the components of the geomagnetic field vector within ±80000 nT. The intrinsic noise of the device during measurements of the total vector of the geomagnetic field after entering all corrections decreased from the level of ±200 to ±2 nT.
To check the operation of the equipment and software, the authors of this article conducted field measurements of the magnetic field of objects whose position in space is known. The source of the anomalous magnetic field was a metal pipe lying on the surface (Fig. 4). The measurements were carried out on the profile directly above the pipe. A rather strong (350– 400 nT) abnormal field arises above the pipe. Magnetic field elements were measured along a profile extending perpendicular to the longitudinal axis of the pipe at a distance of 1.25 m from its end. The distance l between the measurement points is 1 m. The measurement procedure for obtaining all tensor elements includes measurements at three positions of the device. Tripod height at which the instrument rod was attached, was 150 cm. In the first position, the gradiometer rod was installed horizontally along the direction of the measurement profile, and in the second position it was turned 90° and placed perpendicular to the profile. In the third position, the bar was placed in an upright position. For each orientation of the instrument, we measured the three components of the geomagnetic field, the azimuth of the magnetic declination of the horizontal component, and the angular installation parameters of the measuring sensors. The totality of all measurements forms an array of data on the basis of which it is possible to calculate all the gradients of the total field T and all the gradients of the components of this vector in the Cartesian coordinate system Z, Hx, Hy adopted for field magnetometry. Thus, it is also possible to calculate and construct in space the gradient vectors of the total fi eld gradient (gradT) and the gradient vectors of the anomalous field (gradTa).

Measurements with a magnetometer-gradiometer over a metal pipe: а – metal pipe; ZZ ′ – modulus of the vertical gradient of the vertical compo- of the geomagnetic field vector; I – geomagnetic field vector inclination, h – tripod height.
From Fig. 4 it follows that already at the approach to the desired object, the gradient of the vertical component of the vector of the geomagnetic field changes by 130 nT, and the inclination of the vector of the geomagnetic field by 0.24°. The ability of the presented gradiometer-magnetometer to record anomalies of magnetic declination of this magnitude indicates a rather high accuracy of measurements of magnetic field elements and their orientation.
Conclusion. Direct instrumental determination of geomagnetic field gradients are obviously promising if the error in their measurement is significantly lower than the error in measuring absolute field values. Therefore, this problem is closely related to the hardware capabilities of ensuring a given measurement accuracy. The article considers the hardware aspect of using fluxgate sensors and accelerometers to directly measure the three components of the magnetic field gradient vector. The proposed method for the mathematical correction of instrument errors that inevitably occur during the construction of the device, made it possible to achieve acceptable measurement accuracy. The measured gradients of the components of the geomagnetic field are independent of magnetic field variations. If it is possible to provide a certain azimuth, additional information appears that allows you to determine the direction of the magnetic object from the measurement point.
References
Instructions for Magnetic Exploration (ground magnetic survey, aeromagnetic survey, hydromagnetic survey), Nedra, Leningrad (1981).
A. A. Logachev and V. P. Zakharov, Magnetic Exploration, Nedra, Leningrad (1979), 5th ed.
S. S. Zvezhynsky and I. V. Parfentsev, “Magnetometric fluxgate gradiometers for the search for explosive objects,” Spetstekhn. i Svyaz, No. 1, 16–29 (2009).
D. G. Milovzorov and V. Kh. Yasoveev, “Mathematical modeling of gradient transducers with fluxgate sensors,” Avtometriya, 53, No. 4, 95–103 (2017), DOI: https://doi.org/10.15372/AUT20170411.
E. I. Krapivsky, A. N. Lyubchik, and A. A. Belikov, “Investigation of the magnetic fields of pipelines with a gradiometer to monitor their technical condition,” Proc. 5th In. Sci. School of Young Scientists and Specialists, Problems of Subsoil Development in XXI Century through the Eyes of the Young, Moscow, Nov. 11–14, 2008, URAN IPKON RAS, Moscow (2008), pp. 350–353.
A. A. Dubov, “A method for determining the limiting state of metal in the zones of SC by the gradient of the magnetic field of scattering,” Proc. 2nd Int. Conf. Diagnostics of Equipment and Structures Using Magnetic Memory of Metal, Moscow, Feb. 26–28 2001, Energodiagnostika, Moscow (2001), pp. 51–64.
Yu. G. Astrakhantsev and N. A. Beloglazova, Integrated Magnetometric Equipment for the Study of Super-Deep and Exploratory Wells, UrO RAN, Yekaterinburg (2012).
Yu. G. Astrakhantsev, N. A. Beloglazova, N. K. Mironova, and Yu. V. Golikov, “Integrated ore logging tool PRK-4203,” Radiotekhnika, No. 7, 144–152 (2016).
Yu. G. Astrakhantsev and N. A. Beloglazova, “Hardware-software complex for continuous inclinometry of oil and gas wells,” Prakt. Priborostr., No. 1, 17–21 (2003).
D. G. Milovzorov and T. M. Loginova, “Gradientometric transducers with fluxgate sensors,” Proc. 9th Int. Sci. Techn. Conf. Measurement, Control, Informatization, Barnaul, June 3–4, 2009, Izd. AltGTU im. Polzunova, Barnaul (2009), pp. 75–76.
G. V. Milovzorov, D. G. Milovzorov, V. Kh. Yasoveev, and T. A. Redkina, Ital. Sci. Rev., No. 18 (9), 53–60 (2014).
T. A. Redkina, D. G. Milovzorov, and R. R. Sadrutdinov, “On the errors of gradiometers with bio-element fluxgate sensors,” Vest. Izhevsk. GTU, No. 3, 132–135 (2014).
T. A. Redkina, D. G. Milovzorov, and V. P. Melnikov, “On the construction of gradiometers with bio-element fl uxgate sensors,” Proc. All-Russ. Sci. Pract. Conf. Innovations in Science, Engineering and Technology, Izhevsk, Apr. 28–30, 2014. Izd. UdGU, Izhevsk (2014), pp. 218–219.
Yu. G. Astrakhantsev, T. A. Sherendo, V. L. Nekhoroshkov, et al., “Use of nanocrystalline and amorphous alloys in borehole fluxgate magnetometers. Structure and properties of nanocrystalline materials,” Sb. Nauchn. Trudov RAN, UrO RAN, Ekaterinburg (1999).
N. A. Beloglazova, “Program-methodical methods of increasing the accuracy of inclinometric and magnetic measurements,” Prakt. Priborostr., No. 2, 68–71 (2003).
S. S. Zvezhinsky and I. V. Parfentsev, “Method of magneto-metric detection of explosive objects,” Spetstekhn. i Svyaz, No. 2, 8–17 (2008).
K. Khurana, L. Kepko, and M. G. Kivelson, Geophys. Monograph Ser., Washington DC (1998), pp. 311–316, DOI: https://doi.org/10.1029/GM103p0311.
Yu. G. Astrakhantsev and N. A. Beloglazova, “High-precision calibration of fluxgate magnetometers using medium-precision inclinometer tables,” Prib. Syst. Razved. Geofi z: Metr. Geofiz., 17, No. 3, 60–62 (2006).
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated from Izmeritel’naya Tekhnika, No. 5 pp. 50–57, May, 2020.
Rights and permissions
About this article

Cite this article
Astrakhantsev, Y.G., Beloglazova, N.A. Algorithmic Correction of Magnetometer Device Errors. Meas Tech 63, 383–390 (2020). https://doi.org/10.1007/s11018-020-01799-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11018-020-01799-9