
Measurement errors of acoustical parameters during ultrasonic inspection of metal pipes using an excitation signal in the form of a radio pulse are examined.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
In recent years, methods and means of ultrasonic inspection of long-length objects: cores, pipes, plates, sheets, rails, etc., have been studied. The foundation of these methods is the waveguide effect of the propagation of ultrasound for significant distances. Various types and modes of ultrasonic vibrations in the wave guide are thus used: longitudinal and surface (Rayleigh) waves and Lamb waves [1,2,3]. Creation of similar ultrasonic systems demands knowledge of dependences of velocity of sound C and attenuation coefficient α on frequency ƒ for waves of various types.
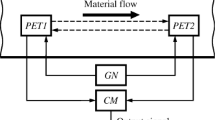
Determination of the dependences of C(ƒ) and α(ƒ) is possible on the basis of resonant methods, but for the objects of long length possessing waveguide properties, there arise problems associated with features of the propagation of ultrasonic waves: a large number of resonances, simultaneous excitation of waves of several types, etc. The purpose of this work is to establish the possibility of measuring the dispersive dependences of C(ƒ) and α(ƒ) for metal pipes by using as the sounding ultrasonic pulse (USP) an amplitude-modulated signal in the form of a radio pulse (RP). In experiments, the duration and amplitude of a RP was 50 μsec and 9 V, and the carrier frequency varied in the range of 30–600 kHz. Piezoelectric transducers (PT) installed on the end face of a metal part or on the surface of a pipe were used for excitation of the RP (Fig. 1, PT1). During excitation by a single pulse, its duration, amplitude, and steepness of the pulse front were 0.5 μsec, 9 V, and 0.03 V/nsec, respectively. In order to reduce the background level, averaging on 100 digital implementations was used (N = 100). The methodology of the experiment is given in more detail in [4].

Location of piezoelectric transducer on a pipe surface: PT1 is the emitting piezoelectric transducer; PT2 and PT3 are receiving piezoelectric transducers.
Figure 2 presents averaged digital oscillograms of a signal for a steel pipe of diameter 114 mm, length 2 m, and wall thickness 4 mm. Figure 2 a shows oscillograms of signals for PTs installed at the end faces of a pipe. The use of RP makes it possible to identify a wave as having longitudinal polarization (with the greatest velocity), or with transverse. Figure 2 b shows oscillograms of signals for PTs installed on the surface of a pipe with an input angle 50° (see Fig. 1). Excitation of RP permits creating and identifying a Rayleigh surface wave (curve 7) and Lamb wave (curve 6). When using a single pulse, only the Rayleigh wave is observed (curve 5), but it is impossible to separate the Lamb wave from noise (N ≥ 100). In this, the increase in amplitude of the pulse to 50 V does not in fact provide a positive effect for any input angles.

Digital oscillograms of signals for the piezoelectric transducer installed at the end faces of a pipe (a) and its surface (b) for charging frequency ƒ = 300 kHz: 1, 5) excitation by a single pulse of longitudinal and surface (Rayleigh) waves; 2, 3, 4, 6, 7) excitation by radio pulse waves: longitudinal, transverse, reflected longitudinal, Lamb, and Rayleigh, respectively.
From results of measurements of the time of passage between the PTs emitting and receiving the RP with a different frequency of charging, it is possible to calculate the velocity of sound from the formula
where l 1 is the distance between the PTs; t is the arrival time of the ultrasonic pulse, determined by increasing the first half wave of the background level by 10%; t 0 is the signal delay time, equal to the sum of the delay times of a signal in the electronic path of the initiation of an ultrasonic pulse of the measuring system, and the propagation of ultrasonic waves to the PTs and the converter sample of the contact area.
The attenuation coefficient is computed as
where U 2 and U 3 are the amplitudes of the voltage of the corresponding signals at the piezoelectric transducers PT2 and PT3 (see Fig. 1); and l 2 is the distance between PT2 and PT3.
Measurement error of acoustic characteristics using RP. As indicated above, an RP with various frequency of charging was used as the sounding signal for determining the velocity of sound and the attenuation coefficient of ultrasonic waves in pipes. The main contribution to the measurement error of velocity comes from errors associated with the determination of the length of a sample and with the signal passage time, ΔC l and ΔC t , respectively.
The value of ΔC l is defined by the error δl of measuring linear dimension of a pipe or other object of measurements, and is in this case less than 1 mm. For pipe length l = 1 m, the contribution to relative error is no greater than 0.1%, and for l = 2 m, it is 0.05%. From this, we obtain ΔC l = ±6 m/sec for C = 6000 m/sec.
The error ΔC t contains several components:
Here, the error \( \Delta {\mathrm{C}}_{t_0} \) is associated with determining the time t 0 of hardware delay; \( \Delta {\mathrm{C}}_{t_{\mathrm{USP}}} \) is caused by the uncertainty and dispersion of the moment of time of recording the arrival of the ultrasonic pulse due to noise and the steepness of the acoustic front of the pulse, and has systematic \( \Delta {\mathrm{C}}_{t_{\mathrm{USP}}}^{\mathrm{sys}} \) and random \( \Delta {\mathrm{C}}_{t_{\mathrm{USP}}}^{\mathrm{ran}} \) components; \( \Delta {\mathrm{C}}_{t_{\mathrm{RP}}} \) is determined by the additional time delay in recording the arrival time of the RP by comparison with the arrival time of a single ultrasonic pulse.
An additional series of measurements was conducted to determine time t 0. A copper plate 14.6 mm thick with dimension 52 × 52 mm served as a reference sample (analogue of an infinite medium). The mean rate of propagation of longitudinal waves in the material, and comparison with the theoretical value, was calculated from the received oscillograms of acoustic signals. Then an experimental time delay t 0 = 2.28·10–7 sec was found. The time delay in the material of the PT prism also was considered during operation with inclined PTs. It was established from the results of measurements that the error \( {\updelta}_{t_0}<4\cdotp 1{0}^{\hbox{--} 8} \) sec. For a steel pipe of length 1 m and velocity of sound 6000 m/sec, the derived time t = 167 μsec, from which \( {\updelta}_{t_0}/t=0.017\% \), and for pipe length 2 m, this error decreases by approximately a factor of two. Hence, the error of velocity \( \Delta {\mathrm{C}}_{t_0} \) can be ignored. Analogous values for t 0 and \( {\updelta}_{t_0} \) were obtained when using an ultrasonic standard sample SO-2 (SN 1502/2015 [5]) as the reference.
The systematic component \( \Delta {\mathrm{C}}_{t_{\mathrm{USP}}}^{\mathrm{sys}} \) is determined by the error \( {\updelta}_{t_{\mathrm{USP}}} \) of recording the time of the “initiation” of the ultrasonic pulse and depends on the steepness of the pulse front of and the final value of the voltage level of operation of the “comparator” that is responsible for recording the electric voltage at output of the receiver signal amplifier path. This error belongs to the systematic, since generally it basically causes a “delay” in detecting the arriving signal. The effect of various factors on the error \( {\updelta}_{t_{\mathrm{USP}}} \) is analyzed in greater detail in [6,7,8]. For a single pulse, it is standard that \( {\updelta}_{t_{\mathrm{USP}}}=0.5\upmu \mathrm{sec} \), and for t = 200 μsec, the error \( {\updelta}_{t_0}/t=0.25\cdotp 1{0}^{\hbox{--} 2} \) sec (0.25%). From this, for C = 6000 m/sec the component of the measurement error of the velocity of the ultrasonic pulse will be \( \Delta {\mathrm{C}}_{t_{\mathrm{USP}}}^{\mathrm{sys}}=15 \) m/sec.
Experimental estimation of error components. Additional measurements were carried out in order to estimate the effect of RP on systematic error of measurements of velocity, as well as to find its random component. A continuous steel cylinder with diameter 5 cm and length 2.508 ± 0.0005 m was used as a reference sample, made of carbonaceous tool steel of category St U7 (98% Fe; 0.66–0.73% C; 0.17–0.33% each, Si and Mn; up to 0.25% Ni; up to 0.028% S; up to 0.03% P; up to 0.2% Cr; up to 0.25% Cu). The diameter of the base of the cylinder is sufficient to consider the cylinder to be close in acoustic properties to a continuous medium. According to data [9], the velocity of longitudinal waves in steel of category St U7 is 5900–5950 m/sec. PTs with diameter 28 mm and a maximum peak and frequency characteristic of 1.25 MHz were used, located at the end faces of the cylinder. These same PTs were used to measure the velocity of longitudinal waves, and were only installed at pipe end faces.
Excitation was first carried out by a single electric pulse of the G5-54 generator with duration 0.5 μsec and amplitude 20 V. Several series of measurements, with four measurements in each series, were performed (where the PTs were rearranged several times). The random error was computed for each series with the Student method with confidence 0.95. Table 1 shows the values of the velocity of sound, as determined by the first arriving pulse, and the random error for measurement series 1 and 3.
For all measurement series, the mean velocity C mean = 5924 m/sec was found, which coincides with data for steel of category St U7. Then the random error at excitation by single pulse \( \Delta {\mathrm{C}}_{t_{\mathrm{USP}}}^{\mathrm{ran}}=8.9 \) m/sec ≈ 9 m/sec was calculated. From this was obtained C = 5924 ± 9 m/sec, where \( \Delta {\mathrm{C}}_{t_{\mathrm{USP}}}^{\mathrm{ran}}/C=0.0015 \) (0.15%), which provides evidence of the sufficiently high precision of the method.
Measurements of the velocity of longitudinal waves in the cylinder described above were conducted in order to estimate errors of measurement of the velocity of RPs. The duration of the RP was 50 μsec for various frequencies of charging: ƒ = 100, 300, 500, and 600 kHz.
Table 2 provides mean values of velocity and random error \( \Delta {\mathrm{C}}_{t_{\mathrm{RP}}}^{\mathrm{ran}} \) for different frequencies of charging. The mean rate of RP for all measurements is equal to 5876 m/sec, which is 48 m/sec less than the velocity of a single ultrasonic pulse (5924 m/sec). This difference does not actually depend on frequency, which on one hand is an experimental fact, and on the other is explained by the fact that the rate of increase for the first half wave of the signal generator for a single pulse is higher than for an RP, even at a frequency of 500 kHz. The amplitude of a single pulse is also higher than for an RP. The indicated difference can be taken as the systematic error of determination of velocity using RP, i.e., \( \Delta {\mathrm{C}}_{t_{\mathrm{RP}}}^{\mathrm{sys}}=48 \) m/sec. As the frequency increases, the random error decreases. This is associated with the rate of increase of the front of the first half wave of the arriving RP. At low frequencies, the front increases more slowly than at high, and the error of determining the arrival time of a pulse increases due to noise: for the first half wave even with averaging N = 100, noise can be 20–40% of the amplitude. Further studies took \( \Delta {\mathrm{C}}_{t_{\mathrm{RP}}}^{\mathrm{ran}}=15 \) m/sec in the frequency range 100–250 kHz and \( \Delta {\mathrm{C}}_{t_{\mathrm{RP}}}^{\mathrm{ran}}=10 \) m/sec in the range 300–600 kHz. These values were confirmed also for “base” measurements of the dispersion of the velocity of sound in pipes.
Thus, the maximum values at excitation by a single pulse and RP, respectively, were used for the measurement error of the velocity of longitudinal waves (taking account of ΔC l ):
In measuring the velocity of sound of transverse waves in pipes, the excitation and recording of a signal were carried out by the same method as for longitudinal waves. Identification of a signal was conducted by extracting the “initiation of ultrasonic pulse” corresponding to a transverse wave from the averaged sequence of a signal (see Fig. 2 a). Since the velocity of transverse waves is approximately half the velocity of longitudinal ones, relative errors decrease by a factor. However, absolute errors increase due to possible superpositions of waves of various types and an increase in the error of determining the arrival time of the corresponding ultrasonic pulse. The research that was conducted shows that the systematic component does not significantly change and the random component increases by a factor of 2, depending on the signal level. The total maximum measurement error of the velocity of sound of transverse waves can be taken as equal to ΔC RP = (63 ± 42) m/sec.
Measurement errors of the velocity of sound of Lamb and Rayleigh waves in pipes. Measurements were conducted with the use of inclined PTs. The signal corresponding to a wave was extracted from the averaged sequence of the signal containing waves of various types. Application of the RP permitted selecting experimentally input angles for the PTs in order to achieve a maximum amplitude of waves of the defined type. The chief objectives of these measurements were to detect waves of this type at various frequencies of charging the RP, and to measure the relative change of velocity for the specified frequency. The absolute error of measurement of velocity had no crucial significance. It was established that the systematic measurement error of velocity of Rayleigh and Lamb waves can be taken as the same as for transverse waves: 63 m/sec. The experimental value of random error determined in the course of the “main” measurements of velocity of Lamb and Rayleigh waves for a pipe of length 2 m was ±65 m/sec. Thus, ΔC RP = 63 ± 65 m/sec. Total errors for Lamb and Rayleigh waves are approximately 2.5 and 4.5%, which is rather large for acoustic measurements. However, it was not possible to measure the velocity of waves of these types for the pipes used in experiment by other methods. This pertains also to metal plates close in size to the dimensions of a pipe: by length, thickness, and width of the corresponding generating pipe.
Measurement error of the attenuation coefficient. Measurements of the attenuation coefficient α of the USP for waves of various types and its dependences on frequency are based on measurement of the peak values of the recorded averaged signal. A similar technique was used for measuring α in solidifying polymeric structures [10]. In [8, 10], the measurement error of the attenuation coefficient was taken as equal to 0.1α. After comparing the results of the indicated works to the data obtained by the authors of the present article for measurements of α and Δα for pipes, it is possible to draw the following conclusions: for longitudinal waves, Δα/α > 10% for all range of frequencies; for transverse waves, Δα/α ≤ 12%; for Rayleigh and Lamb waves, Δα/α ≤ 15%.
For an illustration of the application of the measurement technique using the RP, Fig. 3 shows the derived dispersive dependences of the velocity of sound for waves of various types. The values of the velocity are given taking systematic error into account. The velocity of the longitudinal wave did not in fact change over the entire range of frequencies (C mean = = 5486 m/sec). The dependence C(ƒ) for a wave with transverse polarization had a more complex dependence (C = 2472 to 3291 m/sec). The Rayleigh surface wave was recorded in a range of frequencies 30–190 kHz, and its velocity varied in the range 2457–3059 m/sec. For the Lamb wave, the variation of velocity was 5012–5102 m/sec in the frequency range 340 to 500 kHz. Here, the use of a single pulse or a resonance method did not permit deriving similar dependences. More detailed results of the studies conducted on dispersive dependences C(ƒ) and α(ƒ) for metal pipes based on technique under study are given in [4].

Dispersive dependences of the velocity of waves of different types in a pipe of length 2 m: 1) longitudinal; 2) Lamb; 3) transverse; 4) surface (Rayleigh).
References
D. N. Alleyne and P. Cawley, “Long range propagation of Lamb waves in chemical plant pipework,” Mater. Evaluat., 55, 504–508 (1997).
J. Bingham and M. Hinders, “Lamb wave detection of delaminations in large diameter pipe coatings,” Open Acoust. J., No. 2, 75–86 (2009).
A. Demma and D. Alleyne, “Inspection of pipes using guided waves: state of the art,” Proc. 5th Pan Amer. Conf. for NDT (2011), pp. 1–6.
K. A. Drachev and V. I. Rimlyand, “Acoustic wave propagation in metal pipes,” Proc. 22nd Int. Congr. on Sound and Vibration (2015), pp. 1–8.
GOST P 55724-2013, Nondestructive Inspection. Welded Connections. Ultrasound Methods.
G. A. Kalinov, Automated Monitoring Systems of Parameters of a Liquid in Observation Wells and Tanks: Auth. Abstr. Dissert. Cand. Techn. Sci., Pacific State University, Khabarovsk (2010).
G. A. Kalinov, D. S. Migunov, and V. I. Rimlyand, “An assessment of the effect of noise for a phase method of determining the moment of arrival of acoustic pulses,” Vestn. Tikhookean. Gos. Univ., No. 1 (12), 275–282 (2009).
G. N. Seravin, I. I. Mikushin, and V. N. Lobanov, “Direct pulse methods of measurement of velocity of sound in liquid,” Izv. Yuzhn. Fed. Univ. Tekhn. Nauki, No. 9 (122), 238–243 (2011).
V. V. Murav’ev, L. B. Zuev, and K. L. Komarov, Velocity of Sound and Structure of Steel and Alloys, Nauka, Novosibirsk (1996).
V. I. Rimlyand, V. N. Starikova, and A. V. Bakhantsov, “Dynamics of mechanical, acoustical and electrical properties of epoxyamine compositions during cure,” J. Appl. Polymer Sci. 117, 143–147 (2010).
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated from Izmeritel’naya Tekhnika, No. 6, pp. 60–64, June, 2017.
Rights and permissions
About this article

Cite this article
Drachev, K.A., Rimlyand, V.I. Radio Pulse Measurements of Acoustic Parameters. Meas Tech 60, 620–625 (2017). https://doi.org/10.1007/s11018-017-1245-9
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11018-017-1245-9