
Abstract
In the present work, a fractional order Lord & Shulman model of generalized thermoelasticity with voids subjected to a continuous heat sources in a plane area has been established using the Caputo fractional derivative and applied to solve a problem of determining the distributions of the temperature field, the change in volume fraction field, the deformation and the stress field in an infinite elastic medium. The Laplace transform together with an eigenvalue approach technique is applied to find a closed form solution in the Laplace transform domain. The numerical inversions of the physical variables in the space-time domain are carried out by using the Zakian algorithm for the inversion of Laplace transform. Numerical results are shown graphically and the results obtained are analyzed .
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The theory of classical thermoelasticity investigates the distributions of thermal stresses caused by the temperature field found from the parabolic type heat conduction equation. The heat conduction of such model is based on the classical Fourier’s law
relating the heat flux vector q to the temperature gradient \({\text {grad}}T\) [1], where \(K\) is the thermal conductivity. In the non-classical theory of thermoelasticity, the Fourier’s law as well as the heat conduction equation are replaced by more general equations. One can refer to Chandrasekharaiah [2] for a review and presentation of generalized theories. Hetnarski and Ignaczak in their survey article [3] examined five generalizations of the coupled theory and obtained a number of important analytical results.
Goodman and Cowin [4] established a continuum theory for granular materials whose matrix material (or skeletal) is elastic and interstices are voids. The basic concept underlying this theory is that the bulk density of the material is written as the product of two fields- the density field of the matrix material and the volume fraction field (the ratio of the volume occupied by grains to the bulk volume at a point of the material). This representation of the bulk density of the material introduces an additional kinematic variable in the theory. This idea of such representation of the bulk density was employed by Nunziato and Cowin [5] to develop a non-linear theory of elastic material with voids. They developed the constitutive equations for solid like material which are nonconductor of heat and discussed the restrictions imposed on these constitutive equations by thermodynamics. They showed that the change in the volume fraction causes an internal dissipation in the material which is similar to that associated with viscoelastic material. They also considered the dynamic response and derived the general propagation condition on acceleration wave. Later, Cowin and Nunziato [6] developed another theory of linear elastic material with voids for the mathematical study of the mechanical behavior of porous solid. They considered several application of the linear theory by investigating the response of the material to homogeneous deformation, pure bending of beam and small amplitude of acoustic wave. Iesan [7] presented a linear theory for thermo-elastic material with voids. He derived the basic equations and proved the uniqueness of solution, reciprocity relation and variational characterization of solution in the dynamical theory. Later, Cicco and Diaco [8] presented a theory of thermoelastic material with voids without energy dissipation. One can see the literatures [9–21] for various applications of the theory of generalized thermoelasticity in elastic material with voids in one-dimensional space.
Fractional order differential equations have been the focus of many studies due to their frequent appearance in various applications in fluid mechanics, biology, physics, viscoelasticity, mechanics of solids, control theory and engineering. The most important advantage of using differential equation of fractional order in these and other applications is their non-local property. This means that the next state of a system depends not only upon its current state but also upon all of its historical states. This is more realistic and it is one reason why fractional calculus has become more and more popular. The first application of fractional derivative was given by Abel [22] who applied fractional calculus in the solution of an integral equation that arises in the formulation of the tautochrone problem. Caputo [23] gave the definition of fractional derivative of order \(\zeta \in (0,1]\) for absolutely continuous function. Caputo and Mainardi [24, 25], and Caputo [26] found good agreement with experimental results when using fractional derivative for description of viscoelastic material, and established the connection between fractional derivative and the theory of linear viscoelasticity. Oldham and Spanier [27] studied the fractional calculus and proved the generalization of the concept of derivative and integral to a non-integer order. A theoretical basis for the application of fractional calculus to viscoelasticity was given by Bagley and Torvik [28]. Applications of fractional calculus to the theory of viscoelasticity was given by Koeller [29]. Rossikhin and Shitikova [30] presented application of fractional calculus to various problems of mechanics of solids.
Povstenko [31] constructed a quasi-static uncoupled thermoelasticity model based on the heat conduction equation with a fractional order time derivative. He used the Caputo fractional derivative [23], and obtained the stress components corresponding to the fundamental solution of a Cauchy problem for the fractional order heat conduction equation in both the one-dimensional and two-dimensional cases. Povstenko [32] also studied factional Cattaneo-type equation and generalized thermoelasticity. In the last few years, fractional calculus has also been introduced in the field of thermoelasticity [33–38] successfully.
In this paper, the distributions of the temperature, the change in volume fraction, the displacement and the thermal stress in an infinite solid medium with voids are studied in the framework of a theory of generalized thermoelasticity based on the heat conduction equation with a time fractional derivative of order \(0<\zeta \le 1\). We used the Caputo fractional derivative to formulate the fractional heat conduction equation. The fractional heat conduction equation interpolates the standard heat conduction equation for \(\zeta =1\) of Lord–Shulman (L–S model of generalized thermoelasticity [39]). The solution is obtained using the integral transform [40] technique together with an eigenvalue approach method [41–43]. The numerical inversions of the physical variables in the space-time domain are carried out by using the Zakian algorithm [44]. Numerical results are illustrated graphically and analyzed the results.
2 Basic equations and formulation of the problem
Following, Iesan [7], Sherief et al. [35], and Lord & Shulman [39], the governing equations for a homogeneous isotropic generalized thermoelastic material (possessing a center of symmetry) with voids can be put in following form:
Constitutive equations:
The energy equation for linear theory of thermoelastic material with voids in the presence of heat sources is
Equations of motion:
Equations of equilibrated forces:
where \(\sigma _{ij}\) are the components of the stress tensor, \(e_{ij}\) are the components of strain tensor, \(h_i\) are the components of equilibrated stress tensor, \(\Phi \) is the change in volume fraction field, \(\rho \) is the density, \(\eta \) is the entropy per unit mass, g is the intrinsic equilibrated body force, b is the measure of diffusion effects, \(\alpha, \,sm,\,\xi \) are void material parameters, \(q_i\) are the components of heat flux vector, K is the coefficient of thermal conductivity, \(\Theta =T-T_0,\) T is the absolute temperature, \(T_0\) is the temperature of the medium in its natural state assumed to be such that \(\left| \Theta /T_0\right| \ll 1,\) \(F_i, (i=1,2,3)\) are the components of body forces, l is the extrinsic equilibrated force, \(\chi \) is the equilibrated inertia, \(\lambda,\mu \) are Lame’s constants, \(\beta =(3\lambda +2\mu )\alpha _t,\) \(\alpha _t\) is the coefficient of linear thermal expansion, \(\delta _{ij}\) is the Kronecker delta, \(u_i\) are the components of the displacement vector, \(C_E\) is the specific heat at constant strain, \(\tau _0\) is the relaxation time parameter, Q is the internal heat sources, and
In the above definition, \(I^\zeta \) is the Riemann–Liouville fractional integral operator defined as
where \(\Gamma (\zeta )\) is the well-known Gamma function. A superposed dot represents differentiation with respect to time variable t, and a comma followed by a suffix denotes material derivative and \(i, j = x, y, z\) referee to a general coordinates.
From Eqs. (1)–(8), the field equations in terms of the displacement, volume fraction and temperature field for a homogenous isotropic generalized thermoelastic material with voids and fractional derivative heat transfer subjected to a heat sources in the absence of body forces, and extrinsic equilibrated body forces are
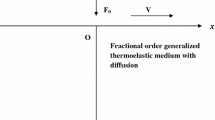
The homogeneous isotropic infinite thermoelastic solid is unstrained and unstressed initially, but has a uniform temperature distribution \(T_0.\) Let \(x=0\) represents the plane area over which the heat sources Q are situated and the solid occupies the infinite space \(-\infty <x<\infty.\) From the symmetry of the problem, all the physical variables considered depend only on the space variable x and time variable t and thus it follows that for one-dimensional problem, \(u_1=u(x,t),\,u_2=0,\, u_3=0.\) Equations (10)–(12), and Eq. (1) may be put in the following forms:
To transform Eqs. (13)–(16) in non-dimensional forms, we will use the following non-dimensional variables
where \(\widetilde{\omega }=\frac{\rho C_Ec_1^2}{K}\) and \(c_1^2=\frac{\lambda +2\mu }{\rho }\).
Using the above variables, Eqs. (13)–(16) take the following forms (omitting the primes for convenience):
where
For time-dependent continuous heat sources over the plane \(x=0,\) we may represent it as \(Q(x,t)=Q_0\delta (x)H(t),\) where \(\delta (x)\) is the Dirac’s delta function defined by
\(H(t)\) is the Heaviside unit step function defined by
and \(Q_0\) is a constant.
3 Solution in the Laplace transform domain: eigenvalue approach
Taking the Laplace transform of parameter \(s,\) defined by
on both sides of the Eqs. (17)–(20) (assuming the homogeneous initial conditions), we get
Following [41–43], Eqs. (22)–(24) can be written in a vector-matrix differential equation as follows:
where
Following the solution methodology through eigenvalue approach [42, 43], we now proceed to solve the vector-matrix differential equation (26). The characteristic equation of the matrix \({\mathcal {A}}(s)\) can be written as
where
Let \(k^2_1,\) \(k^2_2\) and \(k^2_3\) be the roots of the above characteristic Eq. (27) with positive real parts. Then all the six roots of the above characteristic equation which are also the eigenvalues of the matrix \({\mathcal {A}}(s)\) are of the form
where
and
Suppose \({\mathcal {X}}(k)\) be a right eigenvector corresponding to the eigenvalue \(k\) of the matrix \({\mathcal {A}}(s).\) Then after some simple manipulations, we get
We can easily calculate the eigenvector \({\mathcal {X}}_j\,\,(j=1,2,3)\) corresponding to the eigenvalue \(\pm k_j\,\,(j=1,2,3)\) from (28). For our further reference, we shall use the following notations:
We assume the inverse of the matrix \(V=\left(\begin{array}{llllll} {\mathcal {X}}_1,&{\mathcal {X}}_2,&{\mathcal {X}}_3,&{\mathcal {X}}_4,&{\mathcal {X}}_5,&{\mathcal {X}}_6\end{array}\right)\) as
Hence using the expression for \(\tilde{f}(s),\) we can calculate the expression for \(Q_r\) as (see [43] for details):
As in [43], the solution of the vector-matrix differential equation (26) can be written as
where
Since \(y=V^{-1}\tilde{v}\) and and the field variables in \(\tilde{v}\) vanish at \(x=+\infty,\) we neglect the first term on the right hand side of (32), and we get
since \(y_1,\) \(y_3\) and \(y_5\) are neglected from the physical considerations of the problem.
Thus, we get
The expressions for \(\bar{u}(x,s),\) \(\bar{\phi }(x,s)\) and \(\bar{\Theta }(x,s)\) can now be written as
Using Eqs. (34)–(36) in the Eq. (25), the stress component \(\bar{\tau }_{xx}(x,s)\) can be determined as
4 Numerical results and discussions
For the final solution of the temperature \(\Theta,\) the volume fraction field \(\Phi,\) the displacement \(u\) and the stress \(\sigma _{xx}\) distributions in the time domain, we adopt a numerical inversion method based on the Zakian [44]. In this method, the inverse \(f(t)\) of the Laplace transform \(\bar{f}(s)\) is approximated by the following relation:
where the constants \(K_i\) and \(\alpha _i\) for \(N=5\) are given in Table 1.
This method is fast and easy to implement, and there is one free parameter, \(N\), to be determined. Thus the solutions of all the physical variables in space-time domain are given by:
To illustrate and compare the theoretical results obtained in the Sect. 3, we now present some numerical results which depict the variations of the temperature, the volume fraction field, the displacement, and the stress component. The material chosen for the purpose of numerical evaluations is magnesium crystal, for which we take the following values of the different physical constants:
The void parameters are
The non-dimensional relaxation time is \(\tau _0=0.02\).
The computations are carried out for \(\zeta =0.5,1.0\) and \(t=0.9\). The results are represented graphically for different positions of \(x\) using MATLAB and Mathematica software. The case \(\zeta =1.0\) indicates the linear Lord & Shulman model with voids and the case \(\zeta =0.5\) indicates the fractional order Lord & Shulman model with voids of generalized thermoelasticity.
Figures 1, 2, 3 and 4 exhibit the space variations of the field quantities in the context of fractional order generalized thermoelasticity for different values of the fractional parameter \(\zeta \).

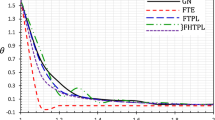
Temperature distribution \(\Theta \) at \(t=0.9\) for different values of \(\zeta \)

Volume fraction field distribution \(\Phi \) at \(t=0.9\) for different values of \(\zeta \)

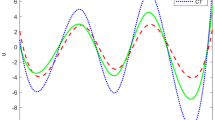
Displacement distribution \(u\) at \(t=0.9\) for different values of \(\zeta \)

Stress distribution \(\sigma _{xx}\) at \(t=0.9\) for different values of \(\zeta \)
Figure 1 depicts the variations of the temperature \(\Theta \) with distance \(x\) for different values of \(\zeta \), and it is noticed that in both the cases (i.e., \(\zeta \) = 0.5 and \(\zeta \) = 1.0), maximum value of \(\Theta \) is 0.53 which is on the boundary of the half-space \(x\ge 0\). We observe from the figure that the difference is negligible in the beginning, and with the increase in \(x\), the difference is slightly pronounced upto \(x\le 3.2\); both the series approach to zero. The trends of both the series are alike only upto \(x\le 1.15\).
Figure 2 shows the variations of the volume fraction field \(\Phi \) with \(x\) for different values of \(\zeta \). It is evident from the figure that both the series have similar trend upto \(x\le 1.6\), and finally converge to zero. We notice from the figure that the difference is significant at the beginning, and with the increase in \(x\), the difference is slightly pronounced upto \(x\le 3.0\). In all the cases (\(i.e., \zeta =0.5,1.0\)), \(\Phi \) attains its maximum value at the boundary of half-space.
Figure 3 displays the variations of displacement component \(u\) for different values of \(\zeta \), and it is noticed that in both the cases (i.e., \(\zeta \) = 0.5 and \(\zeta \) = 1.0), \(u\) starts with zero value, which is on the boundary of the half-space. It is also noticed that both the series have similar trend, that is, first increases to a maximum value and then decreases to a minimum value. We observe from the figure that the difference is significant in the range \(0\le x\le 1.4\), and the difference is slightly pronounced for \(x> 1.4\). Both the series approach to zero with the increase of \(x\).
Figure 4 shows the variations of stress component \(\sigma _{xx}\) with distance \(x\) for different values of \(\zeta \). It is evident from the figure that it start with some non-zero negative value on the boundary of the half-space. The difference in both the series is slightly pronounced in the range \(0\le x\le 0.8\) and the difference is significant in the range \(0.8\le x\le 3.5\). After that both the series approach to zero for \(x\ge 3.5\).
Figures 5, 6, 7 and 8 display the temperature, volume fraction field, displacement, and stress distributions for wide range of \(x\) (\(0.0\le x\le 4.0\)) at \(\zeta =0.5\) for different values of the time parameter \(t=0.3,0.5\) and we have noticed that the time parameter \(t\) play significant role on all the studied fields. The increasing of the value of \(t\) causes increasing of the values of all the studied fields and makes the speed of the waves propagation vanishes more rabidly.

Temperature distribution \(\Theta \) at \(\zeta =0.5\) for different \(t\)

Volume fraction field distribution \(\Phi \) at \(\zeta =0.5\) for different \(t\)

Displacement distribution u at \(\zeta =0.5\) for different t

Stress distribution \(\sigma _{xx}\) at \(\zeta =0.5\) for different t
5 Concluding remarks
-
1.
The results of this work presents the fractional order generalized thermoelasticity theory with voids as a new improvement and progress in the field of the thermoelasticity with voids subjected to a instanced heat sources. According to this theory, we have to construct a new classification to all the materials according to its fractional parameter \(\zeta \) where this parameter becomes new indicator of its ability to conduct the thermal energy.
-
2.
The method eigenvalue approach [41–43] reduced the problem on vector-matrix differential equation to an algebraic eigenvalue problems and the solutions for the field variables were achieved by determining the eigenvalues and the corresponding eigenvectors of the coefficient matrix. In this method, the physical quantities are directly involved in the formulating of the problem and as such the boundary and initial conditions can be applied directly. This is not in other methods, like State-Space-Approach.
5.1 Application of the model
The formation of one-dimensional void material will help researchers in the material chemistry for developing one-dimensional nanocomposites for applications in pharmaceutical technology and also in environmental chemistry. A nanosized highly luminescent \(LaPo_4:Ce^{3+}, Tb^{3+}\) is nowadays one of the important material for biomedical applications such as fluorescence resonance energy-transfer assays, optical imaging, etc. A new mesoporous hybrid titanium (IV) phosphonate nanomaterial has been synthesized by using Benzene-1,3,5-triphosphonic acid as the organophosphorus source in the absence of any template molecule. The photocurrent generated by sensitizer entrapped titanium phosphonate material is quite higher than other titanium oxide based nanomaterials. Thus, one can design different hybrid titanium phosphonate materials bearing organic functionalities to enhance the efficiency of the photon-to-electron energy transfer process. On the other side, the hybrid titanium phosphonate material with nanoscale porosity may have potential biological applications in drug delivery and in lithium ion batteries [45].
References
Ignaczak J, Ostoja-Starzewski M (2010) Thermoelasticity with finite wave speeds. Oxford University Press, New York
Chandrasekharaiah DS (1998) Hyperbolic thermoelasticity: a review of recent literature. Appl Mech Rev 51:705–729
Hetnarski RB, Ignaczak J (1999) Generalized thermoelasticity. J Thermal Stress 1999(22):451–476
Goodman MA, Cowin SC (1971) A continuum theory of granular material. Arch Rational Mech Anal 44:249–266
Nunziato JW, Cowin SC (1979) A non-linear theory of elastic materials with voids. Arch Rational Mech Anal 72:175–201
Cowin SC, Nunziato JW (1983) Linear elastic materials with voids. J Elast 13:125–147
Iesan D (1986) A theory of thermoelastic materials with voids. Acta Mech 60:67–89
Cicco SD, Diaco M (2002) A theory of thermo-elastic material with voids without energy dissipation. J Thermal Stress 25:493–503
Quintanilla R (2002) Exponential stability for one-dimensional problem of swelling porous elastic soils with fluid saturation. J Comput Appl Math 145:525–533
Quintanilla R (2003) Slow decay for one-dimensional porous dissipation elasticity. Appl Math Lett 16:487–491
Casas PS, Quintanilla R (2005) Exponential decay in one-dimensional porous-themoelasticity. Mech Res Commun 32:652–658
Magaña A, Quintanilla R (2006) On the time decay of solutions in one-dimensional theories of porous materials. Int J Solids Struct 43:3414–3427
Magaña A, Quintanilla R (2006) On the exponential decay of solutions in one-dimensional generalized porous-thermo-elasticity. Asymptot Anal 49:173–187
Magaña A, Quintanilla R (2007) On the time decay of solutions in porous elasticity with quasi-static micro voids. J Math Anal Appl 331:617–630
Soufyane A, Afilal M, Aouam M, Chacha M (2010) General decay of solutions of a linear one-dimensional porous-thermoelasticity system with a boundary control of memory type. Nonlinear Anal 72:3903–3910
Messaoudi SA, Fareh A (2011) General decay for a porous thermoelastic system with memory: the case of equal speeds. Nonlinear Anal 74:6895–6906
Pamplona PX, Rivera JEM, Quintanilla R (2011) On the decay of solutions for porous-elastic systems with history. J Math Anal Appl 379:682–705
Aouadi M (2012) Stability in thermoelastic diffusion theory with voids. Appl Anal 91:121–139
Pamplona PX, Rivera JEM, Quintanilla R (2012) Analyticity in porous-thermoelasticity with microtemperatures. J Math Anal Appl 394:645–655
Han Z-J, Xu GQ (2012) Exponential decay in non-uniform porous-thermoe-elasticity model of Lord–Shulman type. Discrete Contin Dyn Syst B 17:57–77
Messaoudi SA, Fareh A (2013) General decay for a porous thermoelastic system with memory: the case of nonequal speeds. Acta Math Sci 33:23–40
Abel NH (1823) Solution de quelques problèms à l’aide d’intégrales défines. Magazin Naturvidenskaberne 1:55–68
Caputo M (1967) Linear model of dissipation whose Q is almost frequency independent—II. Geophys J R Astron Soc 13:529–539
Caputo M, Mainardi F (1971) A new dissipation model based on memory mechanism. Pure Appl Geophys 91:134–147
Caputo M, Mainardi F (1971) Linear models of dissipation in an elastic solid. Rivis ta Del Nuovo Cimento 1:161–198
Caputo M (1974) Vibrations of an infinite viscoelastic layer with a dissipative memory. J Acoust Soc Am 56:897–904
Oldham KB, Spanier J (1974) The fractional calculus. Academic Press, New York
Bagley RL, Torvik PJ (1983) A theoretical basis for the application of fractional calculus to viscoelasticity. J. Rheol. 27:201–307
Koeller RC (1984) Applications of fractional calculus to the theory of viscoelasticity. J Appl Mech 51:299–307
Rossikhin YA, Shitikova MV (1997) Applications of fractional calculus to dynamic problems of linear and nonlinear hereditary mechanics of solids. Appl Mech Rev 50:15–67
Povstenko YZ (2005) Fractional heat conduction equation and associated thermal stress. J Thermal Stress 28:83–102
Povstenko YZ (2011) Fractional Cattaneo-type equations and generalized thermoelasticity. J Thermal Stress 34:97–114
Youssef H (2010) Theory of fractional order generalized thermoelasticity. J Heat Trans 132:1–7. doi:10.1115/1.4000705
Youssef H, Al-Lehaibi E (2010) Fractional order generalized thermoelastic half space subjected to ramp type heating. Mech Res Commun 37:448–452
Sherief HH, El-Sayed A, El-Latief A (2010) Fractional order theory of thermoelasticity. Int J Solids Struct 47:269–275
Ezzat MA, Fayik MA (2011) Fractional order theory of thermoelastic diffusion. J Thermal Stress 34:851–872
Othman MIA, Sarkar N, Atwa SY (2013) Effect of fractional parameter on plane waves of generalized magneto-thermoelastic diffusion with reference temperature-dependent elastic medium. Comput Math Appl 65:1103–1118
Kothari S, Mukhopadhyay S (2013) Fractional order thermoelasticity for an infinite medium with a spherical cavity subjected to different types of thermal loading. J Thermoelast 1:35–41
Lord HW, Shulman YA (1967) Generalized dynamical theory of thermoelasticity. J Mech Phys Solids 15:299–309
Debnath L, Bhatta D (2007) Integral transforms and their applications. Chapman and Hall/CRC, Taylor and Francis Group, London, New York
Sarkar N, Lahiri A (2012) A three-dimensional thermoelastic problem for a half-space without energy dissipation. Int J Eng Sci 51:310–325
Sarkar N (2013) On the discontinuity solution of the Lord–Shulman model in generalized thermoelasticity. Appl Math Comput 219:10245–10252
Sarkar N, Lahiri A (2013) The effect of gravity field on the plane waves in a fiber-reinforced two-temperature magneto-thermoelastic medium under Lord–Shulman theory. J Thermal Stress 36:895–914
Zakian V (1969) Numerical inversions of Laplace transforms. Electron Lett 5:120–121
Chall S, Mati SS, Rakshit S, Bhattacharya SC (2013) Soft-templated room temperature fabrication of nanoscale lanthanum phosphate: synthesis, photoluminescence, and energy transfer behavior. J Phys Chem C 117:25146–25159
Acknowledgments
We are grateful to Prof. (Dr.) S. C. Bhattacharya of the Department of Chemistry, Jadavpur University, Kolkata-700032, India for his kind help and guidance in writing the application of one-dimensional void material. We also express our sincere thanks to the reviewer for his valuable suggestions for the improvement of the quality of our paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Bachher, M., Sarkar, N. & Lahiri, A. Fractional order thermoelastic interactions in an infinite porous material due to distributed time-dependent heat sources. Meccanica 50, 2167–2178 (2015). https://doi.org/10.1007/s11012-015-0152-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11012-015-0152-x