
We analyze basic approaches to the mathematical modeling of motion of the domain walls in ferromagnetics under the influence of external magnetic fields. According to the results of synthesis of the literature data, we present an equation for the displacement of a domain wall with regard for the Brownian distribution of the field. We also describe the available mathematical models constructed on the basis of the dependences of the thickness of domain walls on mechanical stresses, which enable us to determine the maximum displacements of a domain wall and estimate the amplitude of magnetoelastic acoustic emission.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
The state of the objects intended for long-term operation in the Ukraine and, in particular, in the pipeline transport, machine building, and thermal power engineering, requires regular diagnostics because most of these objects have exhausted their design service life and should be replaced. To provide their trouble-free operation, it is necessary to apply novel methods and means of diagnostics. Since the main part of structures is manufactured of ferromagnetic materials, it seems of interest to combine the following physical effects: the action of external magnetic fields on the objects and the excitation of AE elastic waves formed in this case [magnetoelastic acoustic emission (MAE)].
In 1907, Weiss [1] advanced a hypothesis that ferromagnetic materials consist of separate regions of spontaneous magnetization called domains. Moreover, the magnetization is regarded as homogeneous in each domain and the neighboring domains differ by its direction. In 1926, Langmuir analyzed these investigations [2, 3] and formulated, for the first time, the definition of domain boundaries as layers with nonparallel spins separating the domains with different orientations of their magnetization. In 1932, Bloch [4] constructed the first theory of domain walls based on the assumption that, on the boundary of two domains, spins gradually change their direction from parallel to the magnetization vector of one domain to the direction parallel to the corresponding vector of the other domain. This is caused by the fact that their exchange energy is proportional to the square of the angle between them, and a sharp change in their direction in the domain wall results in a quick growth of the exchange energy.
Depending on the change in the direction of magnetization vector, the domain walls are split into 180-degree for which, in passing from one domain to another, the direction of magnetization changes by 180°, and 90-degree in which this direction changes only by 90° [5].
Numerous works (see, e.g., [6–10]) were devoted to the investigation of the applicability of MAE to the diagnostics of ferromagnetic materials.
In particular, the influence of the structure of materials and the hydrogen factor on the behavior of the amplitudes of MAE signals in ferromagnetic materials was studied in [6, 7]. The effect of hydrogen on the magnitude of Barkhausen jumps in these materials was considered in [8]. The state of ferromagnetic structures containing plane cracks was investigated by the method of magnetoacoustic diagnostics in [9]. The Barkhausen jumps were quantitatively estimated by using MAE signals in [10].
In general, the attention of the researchers was focused on the changes in the structure of ferromagnetics under the action of quasistatic magnetic fields but, for efficient diagnostics of the state of structural elements, it is necessary to have mathematical models capable of the quantitatively description of the formation of MAE in the course of displacements of the domain walls in ferromagnetics.
The aim of the present work is to analyze and synthesize the well-known approaches to the mathematical modeling of motion of the domain walls in ferromagnetic materials.
Mathematical Models of Motion of a Domain Wall
Domain Structure of a Ferromagnetic. The analysis of different types of interaction in ferromagnetics confirms that its energy-favorable state is reached when a ferromagnetic specimen is separated into separate regions of spontaneous magnetization (domains) so that its resulting magnetization is equal to zero. In the domain walls of ferromagnetics, spins change their direction from parallel to the vector of magnetization of one domain to parallel to the vector of magnetization of another domain. The exchange energy of spins is proportional to the square of the angle φ between them and rapid changes in their direction lead to a quick growth of the exchange energy and, hence, the rotation of spins in the domain wall is smooth. The problem of gradual rotation of the directions of spins in 180-degree domain walls was studied by Tikadzumi (Fig. 1) [5].

Azimuthal rotation of spins in the domain wall [5].
The exchange energy of a unit surface of the wall decreases as the thickness N of transition layer increases because
where J is the exchange integral (for ferromagnetics J > 0), S is the value of spin, and a is the lattice constant. At the same time, due to the deviation of spins from the axis of easy magnetization, the energy of magnetocrystalline anisotropy increases. However, this energy decreases as the domain wall becomes narrower:
where K is the constant of magnetocrystalline anisotropy.
In actual ferromagnetic crystals, the thickness of the domain walls is determined by the condition of balance of the exchange energy and the energy of magnetic anisotropy. Hence, minimizing the total energy, we can determine the direction of spins at different points of the analyzed domain wall:
The paper [11] was devoted to the investigation of uniaxial anisotropy for a ferromagnetic material with a single axis of easy magnetization (e.g., cobalt). In this case, the energy of anisotropy is
where K u is the constant of uniaxial anisotropy and the law of spin distribution has the form
where A is the constant of exchange interaction. As shown in [11], for its maximal value (at the point z = 0), the angle φ between the spins rapidly changes. This is a smooth process if the spins are located along the axis of easy magnetization or at a certain angle to this axis. Hence, as the thickness of the domain wall, we take its value for which the angle φ is constant and does not change under the condition that the slope of the curve φ(z) inside the entire wall is the same as for z = 0 (the dashed line in Fig. 2), i.e., equal to \( \sqrt{A/{K}_U} \).

Rotation of spins (changes in the angle ϕ ) in a 180-degree domain wall of a crystal with uniaxial magnetic anisotropy [5].
On the basis of this model, Tikadzumi deduced the expressions for finding the thickness of the domain wall in the ferromagnetic \( \updelta =\uppi \sqrt{A/{K}_u} \) and its energy \( \upgamma =4\sqrt{A{K}_u} \) [5]. Hence, if the coefficient K u increases, then the domain wall becomes narrower but its energy increases.
Frenkel and Dorfman were among the first who substantiated a quantitative theoretical hypothesis concerning the regions of spontaneous magnetization, i.e., domains, where, in addition to the exchange energy, only the energy of demagnetization field is taken into account, and formulated the following expression for the width of the domain [12]:
Here, d is the linear size of the specimen and l 0 ~ 10–4 cm.
Later, Landau and Lifshitz [14, 15] refined this approach and took into account the energy of magnetic anisotropy computed according to the known results presented in [13]. As a result, they constructed a rigorous theory of the domain structure of ferromagnetics, described, for the first time, the precession of the magnetic moment with regard for attenuation, and proposed an expression for the thickness of boundary layer of the domain wall:
where A is the exchange integral, K eff is the effective constant of magnetic anisotropy, and the parameter a has the dimension of length and the order of constant of the crystal lattice.
Model of Precession of the Magnetic Moment with Regard for the Parameter of Attenuation. Landau and Lifshitz [14] derived the law of changes in the magnetization J of the domain walls in ferromagnetics:
where H eff is the effective magnetic field, γ is the gyromagnetic factor, and α is the parameter of dissipation (attenuation). The precession of the magnetic moment starts when the magnetic field is switched on. In the case where α = 0, i.e., in the absence of attenuation, the magnetic moment begins to move along the lateral surface of a cone for an infinitely long time (Fig. 3a). However, in the case of strong attenuation, it goes around the field without making any rotations (Fig. 3c).

Precession of the magnetic moment in the field H : (a) without attenuation, (b, c) with weak and strong attenuation [16].
The surface density of energy of this domain wall is given by the formula
Its value and dependence on the coordinates play an important role in the investigation of the displacements of domain walls. It is known that 180-degree domain walls and also the walls with mutually perpendicular directions of spontaneous magnetization, i.e., 90-degree walls, are typical of multiaxial crystals. However, in the actual crystals, there are structural defects and internal stresses [17–19] and, hence, the domain wall is located to guarantee the minimum increment of energy in the course of its motion. Hence, the 180-degree domains are located at the sites where the internal stresses, the coefficient K eff, and density of γ sd are minimum and the 90-degree domains are located at the sites where the internal stresses change their sign because this corresponds to the change in the direction of the axes of easy magnetization.
Potential-Energy Becker Model. In his monograph [20], Becker formulated a model of separate Barkhausen jumps and described basic regularities of the appearance of these jumps as a result of the irreversible motion of the domain walls. Since the initial position of domain walls in the absence of external magnetic fields under the conditions of thermodynamic equilibrium determines the minimum of free energy of the ferromagnetic specimen [21], in the statistical analysis of Barkhausen jumps, it is represented in the form of random and deterministic functions of the position of domain walls. In the case of motion of plane-parallel 180-degree domain walls in the crystal, it suffices to take into account solely the energy of the domain wall and the energy of demagnetization fields. If we place a crystal of this kind in a magnetic field of strength H parallel to the direction of magnetization of the domains, then the thermodynamic equilibrium in the crystal is violated due to the appearance of a force F H because this leads to displacements of all domain walls. In view of the changes in the internal energies of the magnetization field (F H ), demagnetization field (F N ), and boundary layer (F γ ) observed as the domain wall shifts by a distance dx, the new positions of the domain walls were determined in [20] from the condition of balance of forces as follows:
where
J S is the saturation magnetization, S(x) is the area of the domain that depends on its coordinate x, N(x) is a demagnetization factor, and \( \frac{\partial \upgamma (x)}{\partial x} \) is the gradient of density of the surface energy.
Under the condition N(x) = const, one may decompose the internal forces into the deterministic F d and random F r components. If the crystal structure is homogeneous, then the main role is played by the component F γ and the internal stresses σ are expressed in terms of the parameter
where α and β are coefficients constant for a given crystal, k 1 is the constant of crystallographic anisotropy, and λ is the magnetostriction constant. Moreover, if the structure is heterogeneous, then, in the presence of defects, the contribution of the component
increases [20].
In the course of motion of the domain wall, the deterministic component is
i.e., linearly varies, where b = 2NJ 2 s S 0/x 0 and S 0 is the area of the shifted domain wall, and the random component
has the form of a stationary random function of the argument x, where the quantity ω determines the law of its distribution. It was proved that, for the Poisson distribution of defects and peaks of stresses in the crystal, the function K(ω, x) is normal [22].
Moreover, in [20], one can also find the following equation for the magnetic moment of the ferromagnetic specimen in the presence of Barkhausen jumps:
where x(t) is the displacement of the domain wall, and the following equation of motion of the domain wall:
where m eff is its effective mass.
Model with Random Potential. Micromagnetic models give an adequate description of the rotations of spins and magnetic anisotropy but fail to take into account the three-dimensionality of the problem, the range of interaction, the effect of demagnetization, etc. To overcome these difficulties, it is customary to use new approaches reflecting important aspects of the Barkhausen effect and, in particular, the random character of the magnetic system. Thus, Néel proposed the first model with random potential for the investigation of the hysteresis loop in the Rayleigh region [23, 24] in which the random function was represented as the sum of parabolas with random curvatures. However, this model disagrees with the experimental data because the random field is not correlated and, hence, the distribution of jump sizes is exponential, whereas the tests confirm its power dependence [25–29]. To get just the power dependence, it is necessary to consider correlated random fields.
ABBM-Model of the Equation of Motion with Strong Damping. The approach based on the Brownian distribution of the field was first formulated in [30, 31]. This theoretical model of motion of the domain walls in ferromagnetic materials adequately describes the statistics of Barkhausen noises and is known as the ABBM-model [32, 33]. On the basis of the analysis of motion of a single 180-degree domain wall that decomposes the analyzed specimen into two domains with opposite directions of magnetization (Fig. 4), the following equation of motion with strong damping (attenuation) was proposed for the behavior of magnetization:

Schematic diagram of the domain wall that decomposes the specimen into two domains with opposite directions of magnetization [33].
where H = ct, c is the rate of growth of the external field H, m is the magnetoelastic energy, k is the coefficient of demagnetization, W(m) is a random field, and the damping factor is equal to one.
Some researchers specified the random field as a Brownian process and, taking into account the growth of correlations, deduced an equation similar to the Langevin equation for random walks in a field with bounding potential U(ν) = kν − c ln (ν) [33]:
where
and f (m) is a noncorrelated random field with variance D.
The total energy of the domain wall is formed by the magnetostatic energy and the energy of demagnetization field:
where
and h(\( \overrightarrow{r} \), t) is a function specifying the position of the domain wall.
Since actual materials always contain nonmagnetic inclusions, dislocations, and residual stresses, which lead to the deformation and arrest of the domain walls, they are modeled by introducing random potentials whose derivatives specify the force fields η(\( \overrightarrow{r} \), h) acting upon the domain walls. Moreover, the fluctuations of the direction of anisotropy also contribute to the deceleration of the domain wall. These fluctuations are connected with the changes in the surface energy γw, which is a function of the location of the wall [34]
Taking into account all components of energy, we get the following equation of motion of the domain wall [33]:
where \( \overline{k}=4{\upmu}_0k{M}_S/V \) is the effective coefficient of demagnetization, M S is the saturation magnetization, μ0 is the magnetic permeability of vacuum, V is the volume of the domain, \( \tilde{h}={\displaystyle \int {d}^2r^{\prime }h\left(\overrightarrow{r}^{\prime },t\right)} \), and
is the core of the dipole interaction. However, the following discrete analog of (15) is most often used for calculations:
where J is the effective pair interaction.
Finding the sum of Eqs. (16) over the number of centers of fixing of the domain wall i, we get an equation for the total magnetization m similar to Eq. (12):
where \( \tilde{c}=c/D \), c is the growth rate of the external magnetic field and D is the variance of the noncorrelated random field. The asymptotically statistical distribution of the velocity of motion of the domain wall v has the form of the Boltzmann distribution:
The distribution in the time domain obtained as a result of simple transformations takes the form [11]
Replacing the term ∑ N i = 1 η i in Eq. (17) by the effective field W(m) characterized by Brownian correlation, we arrive at the following relation for the jump of the domain wall between two configurations [35]:
where the summation is performed over the positions of the domain wall in the course of its motion. In the mean-field theory, this quantity is proportional to the size of the avalanche of jumps S = |m ′ − m|. If we assume that the quantity Δη i is not correlated and its signs are randomly distributed, then we get a Brownian blocking field, which gives a quite efficient description of disordering caused by the collective motion of flexible domain walls [36]:
where D quantitatively determines the fluctuation of W.
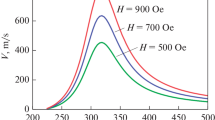
By using the Boltzmann distribution (according to the ABBM-model) (19), it is possible to conclude that, under the condition \( \tilde{c} \) < 1, the domain wall moves as an avalanche, and the sizes of jumps and their duration are distributed according to the power law (Fig. 5).

Size distribution of the jumps of domain walls for different rates of changes in the magnetic field [35]: (1) \( \tilde{c} \) = 0.0, (2) 0.125, (3) 0.2, (4) 0.25, (5) 0.375, (6) 0.6.
For \( \tilde{c} \) > 1, the motion of the wall is smoother with fluctuations decreasing as the rate \( \tilde{c} \) increases and the sizes of jumps S of the walls are distributed according to the law [35]
where S 0 ~ (H − H c )−1/σ , σ is a constant of the material, and τ is the critical index.
The elastic displacements in the body caused by the sudden appearance of a bulk source of transformation strains (without external mechanical stresses) [37] induced by magnetostriction (the jumps of 90-degree domain walls) can be estimated by using the Eshelby approach [38]. In other words, if we fictitiously remove the material of a part of the source by cutting along the surface covering this volume, then this material (inclusion) suffers transformation deformation without changes in the level stresses inside the inclusion. Just these transformation strains Δε rs characterize the source of MAE.
In [37], this method was generalized for the dynamic problem of excitation of MAE. It was assumed that AE is generated by the regions located near domain walls (Fig. 6a) [8]. Moreover, it was assumed that the zone of rearrangement of the domain structure (due to the magnetostriction effect, this zone is a source of MAE) is initially spheroidal with semiaxes a 1 and b (a 1 > b) and that the magnetostriction changes in the region of remagnetization is symmetric about the point 0. As a result, the indicated region becomes elongated along the Oz -axis and its major semiaxis becomes equal to a 2 (Fig. 6b). The increment of the volume of remagnetization region is given by the formula

Schematic diagram of the region of excitation of MAE (a) and its bulk source (b) [8].
In [37], the authors deduced the formula for the component u r of displacement vector in the polar coordinate system r, θ (the angle θ is measured from the plane corresponding to the propagation of longitudinal elastic waves caused by the changes in the domain structure of the ferromagnetic due to the Barkhausen effect) [8]:
where λ and μ are the Lamé constants, ρ is the density of the medium, ε zz is a component of the strain tensor, and c 1 is the velocity of longitudinal waves.
Thus, when the magnetic-field strength becomes critical, we observe jumps of the domain walls and the displacements caused by these jumps can be estimated by using relation (24). The amplitude of MAE signals is proportional to the transformation strains and to the rate of changes in the volume of the remagnetization region. This result was experimentally confirmed in [40, 41], where a similar dependence was established by analyzing the amplitude values of the recorded MAE signals.
In [8], the experimental investigations were carried out on plates 1100 × 45 × 0.2 mm in size made of nickel and 30 steel. The following characteristics were established for nickel: linear magnetostriction Δl = 10.0 ·10–3mm, increment of the volume ΔV = 9.0 ·10–2mm3, and for 30 steel: Δl = 1.6 ·10–3mm and ΔV = 1.44 ·10–2mm3. According to the parameters of MAE, the maximum displacements were as follows: u r = (1–4)·10–12m for nickel and (2–7)·10–14m for 30 steel [8]. The calculated values were equal to 1.28 ·10–12 and 3.47 ·10–14m, respectively. The following values of the parameters were used in these calculations: ρ = 8900 kg/m3, E = 210 GPa, ν = 0.3, Δl = 10–6m, ε zz = 9.1·10–7, \( \overset{\cdot }{V} \) = 1.0 ·10–5m/sec, and r = 0.1·10–3m for nickel; ρ = 7800 kg/m3, E = 210 GPa, ν = 0.28, Δl = 1.6 ·10–7m, ε zz = 1.46 ·10–7, \( \overset{\cdot }{V} \) = 1.6 ·10–6m/sec, and r = 0.1·10–3m for 30 steel.
Conclusions
The comparative analysis of the mathematical models of motion of domain walls in ferromagnetics reveals great achievements in this field of investigations. However, the existing mathematical models are insufficient to estimate single jumps of the domain walls and to determine the displacements of these walls as a result of Barkhausen jumps or the stresses causing these displacements. The location of the domain walls in ferromagnetic materials in the absence of external magnetic fields is determined by internal forces and, in particular, by the internal stresses caused by the deformations of the crystal lattice or by the inhomogeneous inclusions, magnetic dissipative fields, dislocations, etc. If a specimen of material of this kind is placed in an external field, then a hydrostatic pressure is formed in the wall separating two domains one of which is in a more energy advantageous position than the other domain. The domain wall shifts until this pressure becomes equal to the internal pressure. In the analyzed models, the role of internal pressure is played by the surface density of energy in the domain wall. Its investigation requires special attention because it is connected with mechanical stresses (e.g., caused by dislocations). By using these mathematical models and the dependences of the sizes of jumps of the domain walls on mechanical stresses, we can find the maximum displacements of the domain walls and, hence, estimate the amplitudes of MAE signals.
References
P. Weiss, “L’hypothése du champ moléculaire et la propriété ferromagnétique,” J. Phys., 6, 661–690 (1907).
M. R. Forrer, “Sur les grands phenomenes de discontinuite dans l’aimantation de nikel,” J. Phys., 7, 109 (1926).
F. Preisach, “Untersuchungen über den Barkhauseneffekt,” Ann. Physik, 3, 737 (1929).
F. Bloch, “Zur Theorie des Austauschproblems und der Remanenzerscheinung der Ferromagnetika,” Z. Phys., 74, No. 5–6, 295 (1932).
S. Tikadzumi, Physics of Ferromagnetism. Magnetic Properties of Substances [Russian translation], Mir, Moscow (1987).
V. R. Skal’s’kyi, V. B. Mykhal’chuk, P. M. Dolishnii, and R. I. Semehenivs’kyi, “Influence of the structure of material on the behavior the amplitudes of magnetoelastic acoustic emission,” Fiz. Metody Zasoby Kontr. Seredovyshch Mater. Vyrob., Issue 13, 80–83 (2008).
V. R. Skal’s’kyi, Z. T. Nazarchuk, and O. E. Andreikiv, “Influence of the hydrogen factor on the behavior of the amplitudes of signals of magnetoelastic acoustic emission in ferromagnetics,” Fiz.-Khim. Mekh. Mater., Special Issue, 1, No. 7, 77–81 (2008).
V. R. Skal’s’kyi, O. M. Serhienko, V. B. Mykhal’chuk, and R. I. Semehenivs’kyi, “Quantitative estimation of the Barkhausen jumps by the signals of magnetoacoustic emission,” Fiz.-Khim. Mekh. Mater., 45, No. 3, 67–75 (2009).
D. V. Rudavs’kyi, “A method for the magnetoacoustic diagnostics of structures made of ferromagnetic materials and containing plane cracks,” Fiz. Metody Zasoby Kontr. Seredovyshch Mater. Vyrob., Issue 13, 114–117 (2008).
Z. T. Nazarchuk, V. R. Skal’s’kyi, B. P. Klym, et al., “Influence of hydrogen on the changes in the power of Barkhausen jumps in ferromagnetics,” Fiz.-Khim. Mekh. Mater., 45, No. 5, 49–54 (2009).
B. Alessandro, C. Beatrice, G. Bertotti, and A. Montorsi, “Domain wall dynamics and Barkhausen effect in metallic ferromagnetic materials. I. Theory,” J. Appl. Phys., 68, No. 11, 2901–2908 (1990).
J. Frenkel and J. Dorfman, “Spontaneous and induced magnetization in ferromagnetic bodies,” Nature, 126, 274–275 (1930).
N. S. Akulov, Ferromagnetism [in Russian], Gostekhizdat, Moscow (1939).
L. D. Landau and E. M. Lifshitz, “On the theory of the dispersion of magnetic permeability in ferromagnetic bodies,” Phys. Z. Sowjetunion, 8, 153 (1935).
E. M. Lifshitz, “On the magnetic structure of iron,” Zh. Éksper. Teor. Fiz., 15, No. 3, 97–107 (1945).
N. G. Chechenin, Magnetic Nanostructures and Their Application: Tutorial [in Russian], Grant Viktoriya TK, Moscow (2006).
T. S. Krinchik, Physics of Magnetic Phenomena [in Russian], Izd. MGU, Moscow (1976).
S. V. Vonsovskii and Ya. S. Shur, Ferromagnetism [in Russian], Gostekhizdat, Moscow (1948).
R. M. Grechishkin, Domain Structure of Magnetics [in Russian], Part I, KGU, Kalinin (1975).
R. Becker and W. Doring, Ferromagnetismus, Springer, Berlin (1939).
S. V. Vonsovskii, Magnetism. Magnetic Properties of Dia-, Para-, Ferro-, Antiferro-, and Ferrimagnetics [in Russian], Nauka, Moscow (1971).
G. V. Lomaev, “A method of magnetic noises in the nondestructive testing of ferromagnetics,” Defektoskopiya, 4, 75–94 (1977).
L. Néel, “Theorie des lois d’aimantation de Lord Rayleigh. I: Le deplacements dún paroi isolee,” Cah. Phys., 12, 1–20 (1942).
L. Néel, “Theorie des lois d’aimantation de Lord Rayleigh. II: Multiples domaines et champ coercitif,” Cah. Phys., 13, 18–30 (1943).
G. Durin and S. Zapperi, “Scaling exponents for Barkhausen avalanches in polycrystalline and amorphous ferromagnets,” Phys. Rev. Lett., 84, 4075–4078 (2000).
D. Spasojevic, S. Bukvic, S. Milosevic, and H. E. Stanley, “Barkhausen noise: elementary signals, power laws, and scaling relations,” Phys. Rev., Ser. E, 77, No. 9, 2531 (1996).
G. Durin, A. Magni, and G. Bertotti, “Fractal properties of the Barkhausen effect,” J. Magn. Magn. Mat., 140–144, 1835–1836 (1995).
U. Lieneweg and W. Grosse-Nobis, “Distribution of size and duration of Barkhausen pulses and energy spectrum of Barkhausen noise investigated on 81% nickel-iron after heat treatment,” Int. J. Magnetism., 3, 11–16 (1972).
G. Durin and S. Zapperi, “On the power spectrum of magnetization noise,” J. Magn. Magn. Mat., 242–245, 1085–1088 (2002).
G. Bertotti, “Statistical interpretation of magnetization processes and eddy current losses in ferromagnetic materials,” in: Proc. 3rd Internat. Conf. on Physics of Magnetic Materials, Word Scientific, Singapore (1986), pp. 489–508.
U. Balucani, S. W. Lovesey, M. G. Rasetti, and V. Tognetti, “Dynamics of magnetic domain walls and Barkhausen noise in metallic ferromagnetic systems,” in: Magnetic Excitations and Fluctuations II, Springer, Berlin (1987), pp. 135–139.
B. Alessandro, C. Beatrice, G. Bertotti, and A. Montorsi, “Domain wall dynamics and Barkhausen effect in metallic ferromagnetic materials. II. Experiments,” J. Appl. Phys., 68, No. 11, 2908–2915 (1990).
G. Durin and S. Zapperi, “The Barkhausen effect,” in: G. Bertotti and I. Mayergoyz (editors), The Science of Hysteresis, Vol. II, Elsevier, Amsterdam (2006), pp. 181–267.
D. S. Fisher, “Sliding charge-density waves as a dynamic critical phenomenon,” Phys. Rev., Ser. B, 31, No. 8, 1396–1427 (1985).
S. Zapperi, P. Cizeau, G. Durin, and H. E. Stanley, “Dynamics of a ferromagnetic domain wall: avalanches, depinning transition, and the Barkhausen effect,” Phys. Rev., 58, 6353–6366 (1998).
R. Vergne, J. C. Cotillard, and J. L. Porteseil, “Quelques aspects statistiques des processus d’aimaintation dans les corps ferromagnétiques. Cas du déplacement d’une seule paroi de Bloch à 180° dans un millieu monocristallin aléatoirement perturbé,” Phys. Rev. Appl., 16, 449–476 (1981).
K. Aki and P. G. Richards, Quantitative Seismology. Theory and Methods, Freeman, New York (1983).
J. D. Eshelby, “The determination of the elastic field of an ellipsoidal inclusion and related problems,” Proc. Roy. Soc. London, A241, 379–396 (1957).
V. R. Skal’s’kyi, O. M. Serhienko, V. B. Mykhal’chuk, and R. I. Semehenivs’kyi, “Quantitative estimation of Barkhausen jumps by the signals of magnetoacoustic emission,” in: V. V. Panasyuk (editor), Fracture Mechanics of Materials and Strength of Structures: Proc. of the Fifth Internat. Conf. (Lviv, June 24–27, 2014) [in Ukrainian], Fiz.-Mekh. Inst., Lviv (2014), pp. 131–134.
M. Shibata and K. Ono, “Magnetomechanical acoustic emission—a new method of nondestructive stress measurement,” NDT International, 227–234 (1981).
R. L. Sánchez, “Barkhausen effect and acoustic emission in a metallic glass—preliminary results,” Rev. Quant. Nondestr. Eval., 23, No. 4, 1328–1335 (2004).
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated from Fizyko-Khimichna Mekhanika Materialiv, Vol. 51, No. 6, pp. 7–16, November–December, 2015.
Rights and permissions
About this article

Cite this article
Skal’s’kyi, V.R., Pochaps’kyi, E.P. & Mel’nyk, N.P. Modeling of Motion of the Domain Walls in Ferromagnetic Materials (A Survey). Mater Sci 51, 753–764 (2016). https://doi.org/10.1007/s11003-016-9900-x
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11003-016-9900-x