
Abstract
An original method using lock-in thermography with a laser excitation is proposed for the contactless estimation of open crack depths in metal with curvilinear shape. A continuous laser source regularly scans the structure under test leading to a periodical heating. The heat diffusion disturbances induced by a crack located in the thermal diffusion area are measured synchronously with the laser scans. The thermal signature of the crack is extracted from the amplitude of surface temperature images for various scanning speeds of the thermal source. The thermal signatures are analysed according to a length representative of the thermal diffusion length and to the radius curvature of the crack to give a local evaluation of the crack depth. The method, explained with 3D simulations, is experimentally implemented and tested with calibrated curvilinear cracks. The results demonstrate the potentiality of multi-speed laser lock-in thermography method as a contactless measurement tool for the evaluation of complex crack shapes up to 3 mm depth.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Mechanical stresses in metals can develop damaging cracks with complex profiles on surface and in depth. The active infrared thermography which analyses the disturbances of heat diffusion from a heat source is a non-contact and non-destructive technique widely used for the inspection of component [1,2,3,4,5,6,7]. However, the discontinuity of the heat diffusion which reveals the cracks depends also on parameters like the sample surface state, the crack width or the crack shape and the spatial configuration of the heating excitation [8,9,10,11,12,13,14]. Consequently, it is difficult to evaluate the crack depth, one of the most important parameters to assess the dangerousness of the crack, even for simple shape like linear cracks.
In [15] and [16] an original method using lock-in thermography is presented to directly evaluate linear open crack depths without requiring any calibration procedure. A moving punctual continuous heating spot is used as a 3D probe of the crack depth, adjusting its thermal diffusion length by its moving speed. At the same time, an infrared camera acquires surface temperature images in synchronism with the heating spot displacements. The evolution of the spatial derivatives of the amplitude images obtained from the surface temperature for different speeds is representative of the crack depth. It has been chosen in [16] to analyse the thermal response of an area back to the crack, in its “shadow”. This robust method is validated for simple linear crack shape but more complex crack shapes which represent an industrial issue must be analysed.
In this work, the method described in [16] is adapted to crack depth assessment for curvilinear geometry. Results from 3D Finite Element Method (FEM) simulation with COMSOL Multiphysics are used to introduce the adjustments required on crack indicators to take into account the crack curvature. These new developments applied for linear and curvilinear crack shapes are presented and analysed using the multi-speed laser lock-in thermography. They are then experimentally validated using thermo-erosion cracks of different curvature in steel samples.
2 Multi-speed Laser Lock-in Thermography Method
A continuous heating laser spot regularly moves along the crack from one end to the other on a distance L with speed v (Fig. 1). At the end of the path, the heating source is switched off to return back to its initial position as quickly as possible and restarts (switched on) its movement along the crack. Each heated point sees the thermal source periodically (a few periods) during a short time compared to the duration L/v. The thermal source moves in this way for several speeds (usually 5 speeds are sufficient). The heating source has to be located near the crack so that the crack acts as a thermal barrier which modifies locally the heat diffusion. In the case of non-linear crack shapes, the surface temperature distribution, which depends on the thermal diffusivity D of the studied material, is also sensitive to the crack shape curvature. Indeed, the heating spot can be on the concave or convex side of the crack. Consequently, the different speeds of the heating source along the crack must be correctly chosen. The thermal diffusion length μ used as a 3D scan parameter is:
where Δt is the source displacement duration for speed v for one scan.

Experimental multi-speed lock-in thermography set-up
The acquisition process of the infra-red camera is synchronized by an external trigger signal (Fig. 1) that is activated when the laser spot returns to its initial position. The camera lock-in module generates the amplitude and phase images of the surface temperature at the trigger frequency. In the absence of a lock-in module, for instance in the case of simulations, the amplitude and phase images are calculated by Fast Fourier Transform (FFT) of a series of surface images acquired during one scan of the heat source. One amplitude and one phase images are then extracted from the first harmonic (f0 = 1/Δt) of the FFT calculation for each heat source displacement speed.
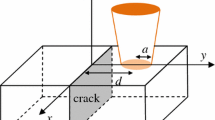
The crack signature is extracted from the amplitude image Ash of an area located in the crack shadow area where heat diffusion and thus the surface temperature on the sample have been impaired after bypassing the crack (Fig. 2). The maximum value μmax of μ has to be chosen larger than the distance d between the heat spot and the crack.

Sample model in cross section (y,z directions). The heat source is located on the left side of the crack and the crack shadow is located on the right side of the crack. d is the distance from the heat source to the crack and h is the crack depth
In the procedure described in [16], a depth indicator is obtained from the ratio between the temperature in the crack shadow area and a reference temperature measured symmetrically to the heat path which corresponds indeed to the temperature expected in the crack shadow area in case of the absence of the crack. The depth indicator has a poor dependency on the crack width if it is sufficiently small compared to crack depth [15, 16]. In the case of curved cracks, the reference and the shadow points must be determined according to geometrical considerations. Figure 3 illustrates the two geometrical possibilities depending on whether the heating spot is in the concave or convex side of the crack path.

Top view of the sample model (x,y directions). The heating spot is located a on concave side or b on convex side of the crack path. The crack shadow is located behind the crack on a line perpendicular to the crack path and passing through the heating spot. The reference point is located on the same line, symmetrically to the crack shadow point with respect to the heating spot
Tetrahedral meshing is adapted to the different domains (bulk, crack) of the studied samples for the 3D Finite Element Method (FEM) simulations made with COMSOL Multiphysics. The number of mesh elements depends on the size of the crack (depth and width). It is between 250,000 and 800,000 for depths between 0.5 to 3 mm and for width of 200 or 50 μm. 100 surface temperature images are calculated during a scan and 5 scans are performed with 5 different speeds. Figure 4a shows a typical mesh in (x,y,z) directions in case of a curvilinear crack of 20-mm curvature radius and 2-mm crack depth. Figure 4b represents the calculated infrared amplitude image A using a continuous moving heat spot (Δt = 16 s and L = 55 mm). The curved crack footprint is clearly visible at the right of the moving heat source. Each crack pixel P extracted from the spatial derivative of the amplitude image is associated with 3 aligned pixels: its local heat source which is its nearest hottest pixel, its reference and its shadow pixels. The crack shadow pixel is chosen at a distance Δdsh of a few pixels Δpsh from P in the shadow area. The reference pixel is at the distance d + Δdsh from the local heat source. Figure 4c shows the localizations of the maximum heating positions (in green), the crack (in blue), the reference area (in black) and the shadow area for Δpsh = 4 pixels (in red). Δpsh value can be chosen as convenient to get rid of the pixel noise at the crack positions and to obtain a sufficient signal.

a Surface mesh in (x,y,z) directions used for FEM simulations in case of curvilinear crack, b simulated amplitude images A (arbitrary units a.u.), c localisation image of crack pixels (in blue), hottest (in green), reference (in black) and shadow pixels (in red) extracted from simulated amplitude image. 1 pixel represents 100 μm × 100 μm. Simulated crack h = 2 mm, width = 200 μm, L = 55 mm. Distance of the heat source to the crack d = 1.25 mm, radius of the heat source r = 0.25 mm, thermal diffusivity D = 4.5 e−6 m2/s, displacement duration of moving continuous heat source Δt = 16 s, number of pixels for the probing area definition Δpsh = 4 pixels (Color figure online)
The shadow amplitude Ash(P) and the reference amplitude A0(P) of the selected pixels P are defined for each speed values. Ash(P) depends on the crack geometry, the heating area and the speed of the heating spot whereas A0(P) does not depend on the crack depth.
3 Crack Indicators for Depth Evaluation
Four samples with a curvilinear crack of 20-mm radius and with a constant depth (0.5 mm, 1 mm, 2 mm, 3 mm) are simulated. The shadow amplitude Ash(P) and the reference amplitude A0(P) of selected pixels are extracted from the calculated amplitude images obtained for different speeds. Figure 5 shows Ash/A0 curves (5 speeds) and their polynomial fits \({f_h} \) as a function of normalized thermal diffusion length μ/μmax. μmax is the maximum value of the chosen thermal diffusion lengths μ. Each depth is identified by a well differentiated curve (color). The line bundle obtained for each depth in the simulations is mainly a consequence of the uncertainty of the calculated temperatures resulting from the meshing and the time sampling.

Ash/A0 and their fits as a function of μ/μmax for simulated depth values h = 0.5 mm (in red), h = 1 mm (in blue), h = 2 mm (in yellow), h = 3 mm (in green) for 10 selected pixels P. The abscissa of the intersection of Ash/A0 and the line s(μ/μmax) in black gives the indicator IB for the crack depth. The value 1 − (Ash/A0)max at μ/μmax = 1 gives the indicator IA for the crack depth. Simulated parameters: maximum of the thermal diffusion length is μmax = 4.7 mm; number of pixels for the probing area definition is Δpsh = 4 pixels (Color figure online)
It was chosen in [16] to extract from the fits two specific points called IA and IB indicators. The indicator IA, which can be defined as IA = 1 − (Ash/A0)max for μ = μmax represents the thermal energy measured behind the crack at long time. The indicator IB represents the reduced thermal diffusion length at which the heat begins to bypass the crack. IB corresponds to the value μ/μmax when fh = s, s being generally chosen as a decreasing linear function of μ/μmax,; here, s = 1 − μ/μmax.
Finally, to improve the robustness of the depth evaluation, the global crack indicator is calculated with:
Figure 6 presents the indicator I calculated with (2) as a function of the x pixel position of 300 selected pixels along the crack for 4 constant depths. (The crack extremity pixels are not considered). These curves show the good sensitivity of indicator I to the crack depth although the indicator seems to slightly depend on the crack position, more importantly for larger depth.

Indicator I (arbitrary unit) along the crack (pixels in x direction) of a curvilinear crack (radius 20 mm) for 4 depth h values (0.5 mm in red, 1 mm in blue, 2 mm in yellow, 3 mm in green). The heating displacement is in the concave area. 1 pixel represents 100 μm (Color figure online)
4 Geometry Considerations for Depth Evaluation in Case of Curvilinear Crack Shapes
In order to assess the impact of the crack curvature, the multi-speed laser lock-in thermography method is applied to various curvilinear crack shapes. The presented simulated results are calculated using a moving continuous heat spot along a curved crack shape with a constant crack depth h. In these simulations, the crack width is chosen equal to the presented experimental artificial crack width (200 μm).
4.1 Localisation of the Heating Spot with Respect to Crack Curvature
In case of a curvilinear curve, the heating spot can be positioned at a distance d on the convex or on the concave crack side. Figure 7 shows the simulated amplitude images for a 20 mm radius curved crack.

Infrared simulated amplitude image A. a Concave configuration, b convex configuration. The simulated depth is h = 2 mm. 1 pixel represents 100 μm * 100 μm. The crack curvature is 20 mm. The distance of the heat source to the crack is d = 1.25 mm. The number of pixels for the probing area definition is Δpsh = 4 pixels. The thermal diffusivity is 4.5 e−6 m2/s
In Fig. 8, Ash (in blue) and A0 (in red) are extracted along the x direction for 5 heating spot speed (Δt between 2 and 16 s) for the selected pixels along the crack for the concave (Fig. 8a) or the convex (Fig. 8b) heating configuration. In the concave configuration (Fig. 8a), A0 is higher and Ash is slightly lower than in the convex configuration (Fig. 8b). Consequently, Ash/A0 is lower for the concave configuration.

Ash (in blue) and A0 (in red) (arbitrary units) as a function of position x, extracted from simulated amplitude images obtained for 5 spot speeds. a Heating spot in the concave area. b Heating spot in the convex area. Simulated depth h = 2 mm. 1 pixel in x direction represents 100 μm. The distance of the heat source to the crack is d = 1.25 mm. The crack curvature is 20 mm. The number of pixels for the probing area definition is Δpsh = 4 pixels. The thermal diffusivity is 4.5 e−6 m2/s
Consequently, the resulting I indicator is higher if the heating spot is in concave configuration compared to that obtained in convex configuration. The model might not be suitable when the heating spot is in convex configuration, for example when Ash/A0 is near or greater than 1.
I indicators obtained for the concave and convex configurations are presented Fig. 9 for two d distances. Calculated I obtained for the heating spot in a concave configuration (in blue) leads to better differentiation of depths. In the convex configuration (in red), I indicator loses sensitivity for small crack depth and greatly depends on distance d compared to the concave configuration.

Indicator I (a.u.) as a function of x position (pixel) for curvilinear crack shapes for 4 crack depths (h = 0.5 mm, h = 1 mm, h = 2 mm, h = 3 mm) and for concave configuration (in blue) and convex configuration (in red)
Figure 10 presents more specifically the concave and convex mean responses with d = 2 mm which is the distance of the experimental results presented thereafter.

Indicator I (a.u.) as a function of simulated crack depth (mm) for a 20 mm curvilinear crack shapes (heating spot in a concave configuration (in blue) and in a convex configuration (in brown)). The linear line is the fitting curve for the linear crack response (in green). The distance d = 2 mm (Color figure online)
For a distance of 2 mm (Fig. 10), I obtained in the convex heating position (in brown) are underestimated compared to those obtained for a linear configuration (in green). Conversely, I obtained for the concave heating position (in blue) are overestimated.
4.2 Radius of the Curvilinear Crack
The surface amplitude is simulated with different crack curvatures (R = 10 mm, R = 20 mm, infinity R). Figure 11 compares the I indicator obtained from linear (infinity R) and curvilinear heating displacements (which amounts to saying linear or curvilinear crack shapes) obtained for d = 1.25 mm. Figure 11 shows that the I values obtained for the curved crack (extracted from Fig. 9) are overestimated compared to those obtained for a linear crack. Furthermore, the indicator values are higher for the concave heating compared to those obtained with the convex heating. These observations show the I dependence to the crack geometry in x, y directions and that a geometrical correction has to be taking into account.

Indicator I (a.u.) for linear and curvilinear crack shapes as a function of crack depths (mm) for different heating configuration (convex or concave). The linear line is the fitting curve for the linear crack response. The crack radius is R = 20 mm or R = 10 mm, the distance is d = 1.25 mm
The results obtained for the concave configuration better differentiate the different depths. Thus they are used afterwards to determine a basic geometrical correction. The chosen geometric factor takes into account the radius of curvature of the heated area (R − d) as well as the distance between the heating area and the shadow area (d + dsh). The most suitable geometric model is the square function. For a large radius of curvature, the model tends to the linear model.
The depth evaluation hev is deduced from the indicator I using only the concave results by:
where G is the correction deduced from the slope of the linear response (line in Fig. 11). Since the indicator depends little on the crack opening [16], G is virtually independent of the crack width.
Figure 12 shows the evaluated depth obtained using (3). The G value deduced from the linear (infinity R) response is equal to 5 for d = 1.25 mm and 6 for d = 2 mm for material whose thermal diffusivity is close to the one of steel. These simulated results obtained for curvilinear crack (R = 10 mm and R = 20 mm) validate the method for curvilinear cracks. The proposed geometrical correction for the depth indicators is efficient if the heating spot is localised in the crack concave area.

Depth evaluation (mm) as a function of simulated h (mm) for the non-constant linear crack and for curved constant cracks (R = 10 mm and R = 20 mm) with G = 5 for d = 1.25 mm and G = 6 for d = 2 mm. The black line corresponds to the expected response
5 Experimental Results
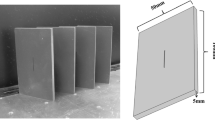
Experimental tests were carried out to access to the depth evaluation of artificial vertical open cracks made by electro-erosion in steel cubes. Four steel samples have a curvilinear crack of radius 20 mm with a constant depth (0.5 mm, 1 mm, 2 mm, 3 mm). One sample is a steel block with a linear crack with no constant 0–4 mm depth. The measured thermal diffusivity of the plate [13] is equal to 4.5 ± 0.3 10−6 m2 s−1. The shape of the cracks is necessary to correctly position the laser spot and to determine the local radius of curvature necessary for the geometric correction. In this study, the crack shapes are well identified. A prior localization step is therefore not necessary. In less favorable cases, the image of the crack location obtained without optimizing the position of the laser [17], provides the necessary information both to adjust the trajectory of the laser spot and to determine the local radius of curvature of the crack.
Using the multi-speed laser lock-in method, the experimental results are obtained from 5 amplitude infrared images of 5 laser displacement speeds (L scanned in 2 to 16 s). The experimental parameters (speed v and distance d) depend on the sample thermal diffusivity and on the power of the thermal source. The thermal diffusion length μ is obtained by (1). The thermal sensitivity of the method is better for low speed which induces maximum thermal length μmax, but the synchronous acquisition process may shift near DC measurements.
Figures 13, 14, 15 show the amplitude images obtained for a sample with a curvilinear crack and for the sample with a linear crack. The laser is positioned in the concave area of the crack curve (Fig. 13), in the convex area (Fig. 14) or near the linear crack (Fig. 15). FigureS 13b, 14b and 15b show the localization of the crack pixels, the hottest, normalized and shadow pixels extracted from measured amplitude image (FigS. 13a, 14b and 15b).

Heating displacement along the concave side of the curvilinear crack, a amplitude images A (arbitrary units a.u.), b localisation of crack pixels (in blue), hottest (in green), reference pixels (in black) and shadow pixels (in red) extracted from measured amplitude image. 1 pixel represents 100 μm × 100 μm. The crack width is 200 μm and crack depth is h = 2 mm. Thermal diffusivity is D = 4.5 e−6 m2/s. Displacement duration of moving continuous heat source is Δt = 16 s. Number of pixels for the probing area definition is Δpsh = 4 pixels

Heating displacement along the convex side of the curvilinear crack, (a) amplitude images A (arbitrary units a.u.), (b) localisation of crack pixels (in blue), hottest pixels (in green), reference pixels (in black) and shadow pixels (in red) extracted from measured amplitude image. 1 pixel represents 100 μm × 100 μm. The crack width is 200 μm and crack depth is h = 2 mm. Thermal diffusivity is D = 4.5 e−6 m2/s. Displacement duration of moving continuous heat source is Δt = 16 s. Number of pixels for the probing area definition is Δpsh = 4 pixels (Color figure online)

Heating displacement along a linear crack, a amplitude images A (arbitrary units a.u.), b localisation of crack pixels (in blue), hottest pixels (in green), reference pixels (in black) and shadow pixels (in red) extracted from measured amplitude image. 1 pixel represents 100 μm × 100 μm. The crack width is 200 μm and crack depth h = 0.5–3.5 mm. Thermal diffusivity is D = 4.5 e−6 m2/s. Displacement duration of moving continuous heat source is Δt = 16 s. Number of pixels for the probing area definition is Δpsh = 4 pixels (Color figure online)
The presented process is first validated using the linear crack with a non-constant depth. The I indicator responses calculated using (2) are presented Fig. 16. The G value deduced from the slope of the line is equal to 6 which corresponds more or less to the one obtained by simulation.

Indicator I (a.u.) as a function of x displacement (mm) for a non-constant 0.5–3.5 mm crack depth. The black line corresponds to the linear response. Laser power P = 2 W. Studied length along the crack Δx = 30 mm (Color figure online)
Figure 17 shows the Ash/A0 curves (5 measurements and their fits) for the four steel samples having a curvilinear crack from which are extracted the indicators IA and IB. Figure 17a, the heating laser spot in in concave area: the depth information is relevant. Figure 17b, the heating laser spot in the convex area: the depth information is lost for shallow depths.

Ash/A0 measurements and their fits (a.u.) as a function of μ/μmax for crack depth values h = 0.5 mm (in red), h = 1 mm (in blue), h = 2 mm (in yellow), h = 3 mm (in green) for 40 selected P pixels. The intersection of an Ash/A0 curve and the lines (μ/μmax) in black gives the IB indicator of the crack depth. The value 1 − (Ash/A0)max at μ/μmax = 1 gives the IA indicator of the crack depth. a Concave configuration, b convex configuration. Maximum of the thermal diffusion length μmax = 4.8 mm. Number of pixels for the probing area definition Δpsh = 4 pixels. Laser power 2 W (Color figure online)
The post processing procedure extracts IA and IB indicators from Fig. 17a to calculate I indicator following (2) (Fig. 18).

Indicator I (a.u.) along the crack (x direction) of curvilinear crack for four h values (0.5 mm in red, 1 mm in blue, 2 mm in yellow, 3 mm in green) in case of a concave configuration of the heating spot (Color figure online)
The depth evaluation (Fig. 19) is calculated from (3) with G = 6 for 4 depth values extracted from the linear crack responses (h = 0.5 mm, h = 1 mm, h = 2 mm, h = 3 mm) and for the 4 depth values of the curvilinear cracks in case of a concave heating spot configuration.

Crack depth evaluation (mm) as a function of h (mm) for the non-constant linear crack (4 measurements) and for the curvilinear constant depth electro erosion “cracks” with a heating spot displacement on the concave side of the crack. Width of the cracks 200 μm, G = 6. The black line corresponds to the expected response (Color figure online)
With a 2 W continuous laser power and a high sensitivity infrared camera, the multi-speed laser lock-in method allows to evaluate 0–3 mm crack depth for linear crack as well as for curvilinear crack. The total camera acquisition duration is around 2 min for 5 multi-speeds lock-in method.
6 Conclusion
The multi-speed lock-in infrared thermography method is an experimental method which allows to evaluate linear and curvilinear crack depth, independently of their width.
The evolution of the depth indicator is analysed by simulations for curvilinear crack. The simulation results allow to propose a simple geometrical correction to take into account the crack curvature in the calculations of depth evaluations. Measurements with an infrared camera obtained with linear and controlled curvilinear “cracks” in steel blocks validate the proposed indicator for curvilinear shapes. The geometrical correction is made on simple cases of curvilinear cracks with constant radius of curvature. For more complex geometries, it is then necessary to take into account local radii of curvature. Taking into account the shape of the crack allows to study cracks other than linear.
The multi-speed lock-in infrared thermography method evaluates cracks of a few centimetre long. This method is indicated for the investigation of curvilinear geometries as long as the displacement of a laser beam onto the surface is possible. No surface preparation and no calibration procedure are required. The depth evaluation method is non-polluting, non-destructive and is implemented with simple optical adjustments.
Data Availability
All data and materials support the published claims and comply with field standards.
Code Availability
Not applicable.
References
Shifani, S.A., Thulasiram, P., Narendran, K., Sanjay, D.R.: A study of methods using image processing technique in crack detection. In: 2020 2nd international conference on innovative mechanisms for industry applications (ICIMIA), (2020), pp. 578–582 (2020). https://doi.org/10.1109/ICIMIA48430.2020.9074966
Oswald-Tranta, B., Feistkorn, S. Rössler, G., Scherrer, M.: Comparison of different inspection techniques for fatigue cracks. In: Thermosense: thermal infrared applications XLII (2020), vol. 11409, p. 114090C, https://doi.org/10.1117/12.2556853
Netzelmann, U., Walle, G., Lugin, S., Ehlen, A., Bessert, S., Valeske, B.: Induction thermography: principle, applications and first steps towards standardisation. Quant. InfraRed Thermogr. J. 13(2), 170–181 (2016). https://doi.org/10.1080/17686733.2016.1145842
Exarchos, D.A., Dassios, K., Matikas, T.E.: Novel infrared thermography approach for rapid assessment of damage in aerospace structures. In: Smart materials and nondestructive evaluation for energy systems IV, vol. 10601, p. 106010P (2018), https://doi.org/10.1117/12.2300171
Ciampa, F., Mahmoodi, P., Pinto, F., Meo, M.: Recent advances in active infrared thermography for non-destructive testing of aerospace components. Sensors 18(2), 609 (2018). https://doi.org/10.3390/s18020609
Balageas, D., et al.: Thermal (IR) and other NDT techniques for improved material inspection. J. Nondestruct. Eval. 35(1), 18 (2016). https://doi.org/10.1007/s10921-015-0331-7
Barakat, N., Mortadha, J., Khan, A., Abu-Nabah, B.A., Hamdan, M.O., Al-Said, S.M.: A one-dimensional approach towards edge crack detection and mapping using eddy current thermography. Sens. Actuators Phys. 10, 111–999 (2020). https://doi.org/10.1016/j.sna.2020.111999
Mohan, A., Poobal, S.: Crack detection using image processing: a critical review and analysis. Alex. Eng. J. 57(2), 787–798 (2018). https://doi.org/10.1016/j.aej.2017.01.020
Salazar, A., Mendioroz, A., Oleaga, A.: Flying spot thermography: quantitative assessment of thermal diffusivity and crack width. J. Appl. Phys. (2020). https://doi.org/10.1063/1.5144972
González, J., Mendioroz, A., Salazar, A.: Flying-spot thermography: sizing the thermal resistance of infinite vertical cracks. In: Thermosense: Thermal infrared applications XLI, Baltimore, p. 20 (2019). https://doi.org/10.1117/12.2523247
Li, K., Ma, Z., Fu, P., Krishnaswamy, S.: Quantitative evaluation of surface crack depth with a scanning laser source based on particle swarm optimization-neural network. NDT E Int. 98, 208–214 (2018). https://doi.org/10.1016/j.ndteint.2018.05.011
Qiu, J., Pei, C., Liu, H., Chen, Z.: Quantitative evaluation of surface crack depth with laser spot thermography. Int. J. Fatigue 101, 80–85 (2017). https://doi.org/10.1016/j.ijfatigue.2017.02.027
Oswald-Tranta, B.: Time and frequency behaviour in TSR and PPT evaluation for flash thermography. Quant. InfraRed Thermogr. J. 14(2), 164–184 (2017). https://doi.org/10.1080/17686733.2017.1283743
Shi, Z., Xu, X., Ma, J., Zhen, D., Zhang, H.: Quantitative detection of cracks in steel using eddy current pulsed thermography. Sensors 18(4), 1070 (2018). https://doi.org/10.3390/s18041070
Boué, C., Holé, S.: Open crack depth sizing by multi-speed continuous laser stimulated lock-in thermography. Meas. Sci. Technol. 28(6), 065901 (2017)
Boué, C., Holé, S.: Comparison between multi-frequency and multi-speed laser lock-in thermography methods for the evaluation of crack depths in metal. Quant. InfraRed Thermogr. J. 17, 1–12 (2019)
Fedala, Y., Streza, M., Sepulveda, F., Roger, J.-P., Tessier, G., Boué, C.: Infrared lock-in thermography crack localization on metallic surfaces for industrial diagnosis. J. Non Destruct. Eval. (2013). https://doi.org/10.1007/s10921-013-0218-4
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
Not applicable.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Human and Animal Rights
Not applicable.
Ethics Approval
This work has not been published before, is not under consideration for publication anywhere else, and the publication has been approved by all co-authors.
Consent to Participate
All the co-authors consent to submit and they obtained consent from the responsible authorities at the institute/organization where the work has been carried out.
Consent for Publication
All the co-authors consent for publication.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Boué, C., Holé, S. Depth Evaluation of Curvilinear Cracks in Metal Using Multi-speed Laser Lock-in Thermography Method. J Nondestruct Eval 41, 43 (2022). https://doi.org/10.1007/s10921-022-00875-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10921-022-00875-0