
Abstract
In this paper, we construct an efficient spectral Galerkin method to deal with the classical second kind linear VIEs with weakly singular and highly oscillatory kernel. We first study the oscillation and singularity of the exact solution and then based on those results, we propose an efficient fully discrete spectral Galerkin method. The proposed algorithm reaches an optimal convergence order without the influence of the wave number. At last, two numerical examples are provided to verify the efficiency of our proposed method.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Integral equations arise in applications as mathematical models of various physical processes and biological phenomena. In general, they can not be solved analytically and many numerical method for the non-oscillatory or low-oscillatory integral equations has been devised in the books by Atkinson and Brunner, which convey a good picture of these developments and contain an extensive bibliography [1,2,3]. In recent years, highly oscillatory equations coming from applications have received more and more attention. For such problems, conventional numerical methods for them may be expensive because of the oscillatory factor. Therefor, it is meaningful to construct special numerical methods for them.
We firstly introduce some works on the integral equation with VIEs with highly oscillatory kernels. Brunner study the theory of VIEs with highly oscillatory kernel in [2, 4, 5], where the kernels are separable oscillatory ones. Xiang and Wang in [6, 7] solved certain Volterra integral equations of the first kind with a highly oscillatory Bessel kernel, where they resorted to the analytical expression and got the results by treating oscillatory integral in the solution with the Filon type method. Consequently, Xiang and Brunner introduces piecewise constant and linear collocation method based on the direct Filon method for solving second kind weakly singular VIEs with a highly oscillatory Bessel kernel in [8]. They proved that the methods have asymptotic and desirable order. However, these methods do not consider the influence of the highly oscillatory behavior of the solutions. Recently, in [9], Wang and Xu first introduced the notion of the degree of oscillation of the solution in the oscillatory structured spaces, and then presented the oscillation-preserving finite-element Galerkin method for the numerical approximation of the solution of the second kind oscillatory Fredholm integral equations with smooth kernels by incorporating the conventional approximate subspace with a finite number of oscillatory functions. Later, Fermo and Dermee in [10] combined the classical product rule with a dilation quadrature formula to develop a Nystr\(\ddot{o}\)m-type method for solving VIEs with highly oscillatory kernels. Motivated by the idea in [9], we presented an oscillation-preserving Legendre-Galerkin algorithm for VIEs with highly oscillatory and smooth kernels in [11]. However, when the kernel function possesses both oscillation and weakly singularity, as far as the authors know, the results on theoretical analysis and numerical approximation for this-type VIEs remain a challenging problem.
In this paper, we are concerned with the second kind linear VIEs with weakly singular and highly oscillatory kernels of the next form
where \({\mathscr {B}}: C(I)\rightarrow C(I)\) defined by
where \(\mu \in (0,1)\), \(\omega \) is the wave number and i is the imaginary unit such that \(i^2:=-1\). f and B are two given functions with \(B(t,t)\not =0\) for \(t\in I\), u is the output function to be determined in an appropriate function space. When the wave number \(\omega \) is small, the singularity of the solution of (1.1) has been systematically studied in [2].
Theorem 1.1
Let m be a nonnegative integer. Suppose that \(B\in C^{m,m}(I^2)\) and f has the form
then Eq. (1.1) has a unique solution \(u\in C(I)\). Moreover, there exist some constants \(d_{j,k}\) such that
But when \(\omega \gg 1\), the exact solution may possess both the singularity and oscillation. To the author’s knowledge, there is rarely theoretical result and numerical simulation on VIEs (1.1) with the huge wave number \(\omega \). The purpose of this paper is to present the analysis of the structure of the analytic solution and the correspondingly efficient numerical approach. To derive our schemes, we employ the resolvent representation theory and the Cauchy residue theorem to study the singularity and oscillation of the analytic solution of (1.1). Then, we present an efficient fractional spectral Galerkin method, which incorporates the fractional approximate subspace with a finite number of oscillatory functions. The spectral Galerkin scheme could not always be used in practical because of the highly oscillatory or singular integrals in the matrices, so we propose an appropriate numerical simulation, which yields a fully discrete scheme. At last, we conduct error estimates between the exact solution and the proposed approximate solution. Especially, our estimate reflects the optimal convergence independent of the wave number \(\omega \).
The rest of the paper is organized as follows. In Sect. 2, the oscillation and singularity of the exact solution is constructed by using the resolvent solution and Cauchy residue theory. In Sect. 3, an efficient numerical algorithm is constructed by combining fractional spectral Galerkin methods and numerical integration schemes. Some useful lemmas and theorems are introduced in Sect. 4, We also derive the convergence result of the scheme in this part as well. Section 5 gives two illustrative numerical examples. At last, some conclusions are drawn in Sect. 6.
2 Singularity and Oscillation Analysis
In the section, we are going to analyze the singularity and oscillation of the original solution of Eq. (1.1) by using the resolvent solution theory and Cauchy residue theorem. We begin with introducing a few notions. Let \(\mathbb {N}_0:=\{0\}\cup \mathbb {N}:=\{1,2,\ldots \}\). For \(n\in \mathbb {N}\), we set \(\mathbb {Z}_n:=\{0\}\cup \mathbb {Z}_n^+\) with \(\mathbb {Z}_n^+:=\{1,2,\ldots ,n\}\). Let \(\overline{z}\) be the conjugate complex number for \(z\in \mathbb {C}\). Let \(L^2(I)\) denote the usual Hilbert space, equipped with the inner product \((\cdot ,\cdot )\) and the corresponding norm \(\Vert \cdot \Vert \). For \(r\in \mathbb {N}\), we denote by \(C^r(I)\) the space of functions having a continuous r-th derivative \({\mathscr {D}}_x^rv \) on the interval I, where \({\mathscr {D}}_x^r\) is the r-th derivative operator about the variable x. For \(\nu \in (0,+\infty )\), we use the symbol \(C^{r,\nu }(I)\) to denote the space of functions \(w\in C(I) \bigcap C^r(0,1]\) such that for \(x\in (0,1]\) and \(j\in \mathbb {Z}_{r}\),
Obviously,
where \(v_1>v_2\). For simplicity, we let \(C^{r,\infty }(I):=C^{r}(I).\) For \(r_1,r_2\in \mathbb {N}_0\), we denote by \(C^{r_1,r_2}(I^2)\) the space of functions \(v(x,t),x,t\in I\) such that the hybrid derivative function \({\mathscr {D}}_x^{r_1}{\mathscr {D}}_t^{r_2}v\) is continuous on \(I^2\). Following the notion in [5, 9], for any norm space X with the norm \(\Vert \cdot \Vert _X\), we denote by \(X_{\omega ,0}\) the non-\(\omega \)-oscillatory space, which means that the norm is independent of the wave number \(\omega \).
Lemma 2.1
Suppose that \(\nu _1,\nu _2>-1\) and \(|a|,|b|\le \omega \). If \(\phi \) is one analytic function on the complex plane \({\mathbb C}\) and there exists one positive constant c independent of \(\phi \) such that
where \(\varrho \) is a positive constant such that \(\varrho <\frac{\omega }{\sqrt{2}}.\) Then there holds
Proof
For \(0<r<\frac{b-a}{4}\), we introduce six cures as follows
and then set
Let
where \(\mathbb {D}\) is the region bounded by \(\Gamma \). Clearly, the function F is analytic in the region \(\mathbb {D}\) and continuous on the domain \(\mathbb {D}\cup \Gamma \). Let
then it follows from Cauchy integral theorem that
Applying \(R\rightarrow \infty \) and \(r\rightarrow 0\) to both sides of (2.4) and then using the next six estimates
conclude that
Letting \(x:=\omega y\) in the last result, we get the desired conclusion. \(\square \)
For \(x\in I\), let
and then set for \(x\in (-1,\infty )\)
Lemma 2.2
Suppose that \(\nu _1>-1\) and \(\nu _2>0\). Then for any nonnegative integer r, \(G_1\in C_{\omega ,0}^{r,\sigma (\nu _1)}(I)\) and \(G_2\in C_{\omega ,0}^{r,\sigma (\nu _2)}(I)\).
Proof
We only prove the first result, the other is similar. In fact, when \(\nu _1\in \mathbb {N}_0\), it is clear that \(G_1\in C_{\omega ,0}^{r,\infty }(I)\). For \(\nu _1\not \in \mathbb {N}_0\) and \(j\in \mathbb {Z}_r\),
Consequently,
When \(j<\nu _1\), then
When \(\nu _1<j-1<j\), for \(y\in [0,\infty )\), there holds that \(e^{-\omega y} y^{\nu _2}\le c\) for \(\nu _2>0\). Then
When \(j-1<\nu _1<j\), a direct observation yields the fact that \(e^{-\omega y} y^{\nu _2} (x^2+y^2)^{\frac{1}{2}}\le c\) for \(\nu _2>0\). Consequently,
By using definition (2.1), a combination of (2.7)-(2.10) completes the proof. \(\square \)
Lemma 2.3
Suppose that the function \(L\in C_{\omega ,0}^{r,r}(I^2)\) and define Volterra integral function by
Then there exist two functions \(S_1,S_2\in C_{\omega ,0}^r(I)\) such that
Proof
This result is a consequence of the Lemma 5.2 in [9]. \(\square \)
Lemma 2.4
Suppose that \(\nu _1>-1, \nu _2>0\) and \(v\in C_{\omega ,0}^{2\,m,6\,m+1}(I^2)\). Then there exist one function \(S\in C_{\omega ,0}^{m,m}(I^2)\) and some functions \(c_k\in C_{\omega ,0}^{m}(I)\) for \(k\in \mathbb {Z}_{2\,m}\), \(d_j\in C_{\omega ,0}^m(I), j\in \mathbb {Z}_{m-1}\) such that
Proof
A direct use of the 2m-order Taylor expansion to the function v about the variable t yields that
where the remainder term R(x, t) is given by
Again using the Taylor expansion to the above function R about the variable t yields that
where the remainder term Q(x, t) is given by
It is clear that \(Q\in C_{\omega ,0}^{m,m}(I^2).\) Substituting the results (2.13) and (2.14) into the left hand of (2.12) produces the desired conclusion with
This ends the proof. \(\square \)
Lemma 2.5
Suppose that the conditions in Lemma 2.4 hold. Let
Then there exist two functions \(G_1, G_2\in C_{\omega ,0}^{m,\nu }(I)\) with \(\nu :=\min \{\sigma (\nu _1),\sigma (\nu _2)\}\) such that
Proof
Substituting the estimate (2.12) into the right hand of (2.15) yields that
Following Lemma 2.3, we concludes that there exist two functions \(G_{11}, G_{12}\in C_{\omega ,0}^{m,\infty }(I)\) such that
On the other hand, making use of Lemma 2.1 with \(\phi :=1\), \(a:=0\) and \(b:=x\), that
Let
It follows from Lemma 2.2 that \(G_{2,1,k}, G_{2,2,k}\in C_{\omega ,0}^{m,\sigma (k+\nu _1)}(I),\) \(G_{3,1,j}, G_{3,2,j}\in C_{\omega ,0}^{m,\sigma (j+\nu _2)}(I)\), which completes the proof. \(\square \)
Next we introduce one finite-dimensional space \({V}_{\mu ,r}\) of fractional polynomials, defined by
Lemma 2.6
Suppose that the kernel function \(B\in C_{\omega ,0}^{2\,m,6\,m+1}(I^2)\). If there exist some constants \(c_{j,k}\) such that \(f\in {V}_{\mu ,6\,m+1}\oplus C_{\omega ,0}^{6\,m+1}(I)\), i.e,
then there exist two functions \(\overline{u},\widetilde{u}\in C_{\omega ,0}^{m,\mu }(I)\) such that the solution u has the form
Proof
Let \(B_n(x,t)\) be the n-time iterative kernel of the kernel function \(B_1(x,t):=B(x,t)\), given by
thus, the solution u of Eq. (1.1) has the expression
Clearly, there exists a positive integer N relative to the integer m such that
If we set
then the solution u in (2.20) is rewritten as
It follows from Lemma 2.5 that there exist two functions \(F_{11}, F_{12}\in C_{\omega ,0}^{m,\mu }(I)\) such that
substituting the result above into the right hand of (2.21) with the aid of (2.19) produces the desired conclusion. \(\square \)
Theorem 2.1
Suppose that the kernel function \(B\in C_{\omega ,0}^{2m,6m+1}(I^2)\). If the functions \(\widetilde{f}_1,\widetilde{f}_2\in {V}_{6\,m+1,\mu }\oplus C_{\omega ,0}^{6\,m+1}(I)\),i.e,
where
then there exists two functions \(\overline{u},\widetilde{u}\in C_{\omega ,0}^{m,\mu }(I)\) such that the solution u having the form
Proof
Let
Clearly,
It follows from the classical result in [2] and Lemma 2.6 that \(v_1, v_2\in C_{\omega ,0}^{m,\mu }(I)\). This ends the proof. \(\square \)
3 A Fully Discrete Numerical Method
In this section we are going to consider the spectral method. It is well known that the classical integer order spectral methods are essentially discretization methods for approximating solution of partial-differential equations. The most attractive property of spectral methods may be that when the solution of the problem is infinitely smooth and non- or low-oscillatory, the convergence of the spectral method is exponential. Due to this advantage, spectral methods have achieved great success and become popular in the scientific computing community (see [12,13,14,15,16,17,18,19,20]). But when the original solutions have the singularity, a direct spectral collocation method and a direct spectral Galerkin method are proposed in [17, 18] for solving (1.1) with non-smooth and non-oscillatory solutions, respectively. Although the approximate solution attains the optimal order, its accuracy is low because of a singularity property of the original solution. In order to obtain the exponential convergence of approximate solution for the non-smooth solution, Chen, Shen and Mao in[15] considered a class of generalized Jacobi functions related to fractional calculus, and proposed to use these functions to approximate the solutions of a class of fractional boundary value problems. Error estimates with convergence rate only depending on the smoothness of data were derived therein. In [19], they provide a fractional spectral method that is capable to handle a family of the aforementioned problems in a more efficient way, which achieve spectral convergence for the solution with limited regularity at the end points. In [21, 22], they consider the hp-version collocation method for solving Volterra integro-differential equations. In [12, 13], we propose the fractional spectral collocation method for solving linear and nonlinear VIEs with weakly singular kernels of the second kind. Motivated by the singularity and oscillation analysis in previous section, we are going to approximate two functions \(\overline{u}\) and \(\widetilde{u}\) in the solution (2.23) by using the fractional spectral-Galerkin method. To this end, for any integer \(k\in \mathbb {I}:=\{0,1\}\), we denote by the vector
and
For \(\alpha ,\beta >-1\), we let \(L_{w^{\alpha ,\beta }}^2(I)\) be the Hilbert space associated with the Jacobi weight function \(w^{\alpha ,\beta }(x):=(1-x)^\alpha x^\beta \), equipped with the inner product and the corresponding norm
Let \(J_n^{\alpha ,\beta }(x), n\in \mathbb {N}_0, x\in I\) be Jacobi orthnormal polynomials defined on the interval I with respect to the weight function \(w^{\alpha ,\beta }\), which constitute the basis of \(L_{w^{\alpha ,\beta }}^2(I)\). The special case \(\alpha =\beta =0\) corresponds to the Legendre polynomials. Follow from [23], for any \(k\in \mathbb {N}\),
where
In the second estimate of the equation above we have used the Stirling’s formula. Moreover, when \(\alpha ,\beta >-\frac{1}{2}\), there holds
Introducing a parameter \(\lambda \)
then from the analysis in Theorem 2.1, it is straightforward to approximate u(x) in the space \({\mathbb P}_n^\lambda \oplus e^{i\omega x}{\mathbb P}_n^\lambda \), where \({\mathbb P}_n^\lambda \) is given by
Now we define by the fractional orthonormal polynomial sequences \({T_n}\) of Legendre type,
which satisfies that condition
where \(\delta _{p,q}\) is the Kronecker Delta symbol. We also use Fa\(\grave{a}\) di Bruno’s formula to \(T_n\) and then obtain that there exists a constant c independent of n and x such that
Moreover, the set \(\{T_n\},n\in \mathbb {N}_0\) constitutes an orthnormal basis of the space \(L^2(I)\). Based on this fact, we introduce the finite-dimensional subspace sequences \(X_n\) of \(L^2(I)\), defined by
The efficient fractional spectral-Galerkin method for solving (1.1) is to seek a vector \(\textbf{u}_n:=[{a}_{k,q}:q\in \mathbb {Z}_n,k\in \mathbb {I}]^T\) such that
satisfying the condition
If we denote by \({\mathscr {P}}_{n}\) the orthogonal projection operator from \(L^2(I)\) to \(X_{n}\) and set \({\mathscr {B}}_n:={\mathscr {P}}_n{\mathscr {B}}|_{X_n}\) and \(f_n:={\mathscr {P}}_nf\), then the equation above is rewritten as
In the following, we write the matrix form of (3.6). For \(p,q\in \mathbb {Z}_n\) and \(j,k\in \mathbb {I}\), we define
and then define matrices
On the other hand, we define
and
If we let
thus equation (3.6) has an equivalent matrix form
The exact fractional spectral Galerkin method could not always be used in practice because of the highly oscillatory or weakly singular integral in the matrices. From the computational point of view, we need a fully discrete scheme ready to use for numerical simulation. Thus the quadratures in the matrices will be approximated by general purpose methods in usual. However, these methods may not provide effective results because of the oscillation and singularity. To deal with these integrals efficiently, we design the simplest possible method to obtain the fully discrete form of (3.10), at the same time, the algorithm keeps the optimal convergence order. There are mainly four classes of approaches for calculating oscillatory integrals: asymptotic methods in [24, 25], Filon-type methods in [26, 27], Levin-type methods in [28,29,30,31] and the numerical steepest decent method in [32, 33]. Recently, a new method is presented in [34, 35], which combines the moment free Filon-type method with graded meshes. In this part, we shall first discretize the interval I using a graded meshes, then for each integrals on the subintervals, we use the conventional Gauss-Legendre numerical method and the steepest method to compute the non-oscillatory or low oscillatory and highly oscillatory integrals, respectively. To this end, for \(j\in \mathbb {Z}_n\), let \(\theta _{j,n}\) and \({\omega }_{j,n}\) be the set of \(n+1\) Legendre-Gauss points and the corresponding weights with the Legendre weight function on the interval I. We also let \(\widetilde{\theta }_{j,n}\) and \(\widetilde{\omega }_{j,n}\) be the set of \(n+1\) Laguerre-Gauss points and the corresponding weights with the Laguerre weight function \(\widetilde{w}(x):=e^{-x}\) on the interval \([0,\infty )\). Let \(\mathbb {P}_n\) be the set of all polynomials of degree not more than n. For \( p\in \mathbb {P}_{2n+1}\), let
It is clear that
Suppose \(\phi \in C^m(0,1]\) and there exist two constants \(\delta \in (0,1)\) and \(c_\phi \) depending on \(\phi \) such that
Let
In the following we consider the numerical simulation for (3.13). Since \(\phi \) may have a singularity at \(x=0\), we consider a graded mesh in [36] here. For \(M\in \mathbb {N}\), which will be determined in the next section, discretize the interval I by
Let
and then set
then the integral (3.13) has the form
In order to give the discrete form of \({\mathscr {I}}\left( \phi _{k}^*;\omega _{k}^*,\delta ,m\right) \) for \(k=2,3,\ldots ,M\), we denote by \({\mathscr {L}}_r\phi \) the Lagrange interpolation polynomials for \(\phi \in C(I)\), i.e,
where \({{l}}_{p,n}\) is given by
Replacing \({\mathscr {I}}\left( \phi _{1}^*;\omega _{1}^*,\delta ,m\right) \) by zero and \({\mathscr {I}}\left( \phi _{k}^*;\omega _{k}^*,\delta ,m\right) \) for \(k=2,3,\ldots M \) by \({\mathscr {Q}}({\mathscr {L}}_{r}\phi _{k}^*;\omega _{k}^*,r)\) in (3.15) yields the approximation of \({\mathscr {I}}(\phi ;\omega ,\delta ,m)\) as follows
Thus, we can employ the approach (3.17) to estimate the integrals in \(\textbf{A}_{n}\) and \(\textbf{f}_{n}^-\), respectively. In fact, when \(k=j=0\),
when \(j=0,k=1\), it is clear that
By using (3.17), the fully discrete form of \({a}_{0,1,p,q}\) and \({a}_{-1,0,p,q}\) is obtained by,
On the other hand, for \(j=0,-1\), by the definition (3.9),
similarly as before, using (3.17) yields that
Next we present the fully discrete form of the entries in matrix \(\textbf{B}_n\). Similarly as before, suppose that p(x, t) is a two-dimensional polynomial of degree not more than \(2n_1+1\) about variable x and \(2n_2+1\) about t, let
Obviously, a use of Gauss quadrature twice yields that
the second result holds for \(\omega \not =0\). Next for \(\omega \in (-\infty ,\infty )\), let
where the function \(\psi (x,t)\) satisfies the condition that there exist constants \({\delta }\in (-1,0)\) and \(c_\psi \) depending on the function \(\phi \) such that
In order to give the numerical scheme of the integral above, we discretize the \(I^2\) on a graded mesh. To this end, let
where
Let
and then set
then the integral (3.21) is decomposed into the next form
Let \( ({\mathscr {L}}_{r_1,r_2}\psi )(x,t)\) denote its two-dimensional interpolation polynomial about two variables x, t of \(\psi \), i.e,
Next replacing \({\mathscr {J}}\left( \psi _{j,k}^*;\widetilde{\omega }_{j}^*,\delta ,m\right) \) by zero for \(j=1,2\,M,k=1,2,\ldots ,2\,M\) and \(k=1,2\,M, j=1,2,\ldots ,2\,M\) and others by \({\mathscr {Q}}\left( \psi _{j,k}^*;\widetilde{\omega }_{j}^*,r_1,r_2\right) \) and obtain the numerical scheme
Next we use the scheme (3.25) to estimate \(b_{j,k,p,q}\) in (3.8). For this purpose, let
then
Thus, a direct use of the quadrature (3.25) to the entries above yields their approximations
Replacing the entries \(a_{j,k,p,q}\), \(b_{j,k,p,q}\) and \(f_{j,p}\) by the entries \(\bar{a}_{j,k,p,q}\), \(\widetilde{b}_{j,k,p,q}\) and \(\bar{f}_{j,p}\) we likewise define the matrices \(\bar{\textbf{A}}_{n}\), \(\bar{\textbf{B}}_{n}\), \(\bar{\textbf{f}}_n^-\) and its corresponding blocks. Thus, the fully discrete equation (3.10) had the form,
where the vector \(\bar{\textbf{u}}_{n}\) is given by,
If we denote by the linear operators \(\bar{\mathscr {A}}_n\) and \(\bar{\mathscr {B}}_{n}\) such that their matrix representations under the basis \(X_{n}\) are \({\bar{\textbf{A}}_{n}}\) and \(\bar{\textbf{B}}_{n}\), then Eq. (3.27) has the operator form
where the functions \(\bar{u}_{n}\) and \(\bar{f}_{n}\) are given by
4 Convergence Analysis
This section presents some notations and lemmas and then employs them to establish the existence and uniqueness of the solution in (3.28). The approaches are similar as those in [11]. For the completeness the paper, we are going to give the whole proof process. We first introduce the non-uniformly weighted Sobolev space \(H_{w^{\alpha ,\beta }}^r(I)\), given by
with the norm
Besides, we let \({\mathscr {R}}_n^{\alpha ,\beta }\) be the orthogonal projection operator from \(L_{w^{\alpha ,\beta }}^2(I)\) to \(P_n\). It follows from [23] that there exists a positive constant c such that for \(v\in H_{w^{\alpha ,\beta }}^r(I)\),
Moreover, following [23], for the Lagrange interpolation operator associated with the Legendre-Gauss points defined in (3.16), there exists a positive constant c such that for \(v\in C^{r}(I)\),
We denote by another finite dimensional space \(Z_n\),
and then let \(Q_n\) be the orthogonal projection operator from \(L^2(I)\) to \(Z_n\). It is clear that
which implies that
It is obvious that for \(v\in C^{m,\mu }(0,1]\), then \(v^{\star }(x):=v(x^{\frac{1}{\lambda }})\in C^m(I)\), which implies that
Following Theorem 2.1,
Moreover,
consequently,
Lemma 4.1
Suppose the condition (3.12) holds, then there exists a positive constant c independent of \(\phi \) such that
Similarly, if (3.22) holds, then
Proof
We only prove the first result (4.7), the other is similar. Following (3.13) and (3.17),
The left thing is to estimate (4.9). Firstly,
Secondly, using (4.2) yields that
In the last result we use the inequality of Theorem 2.1 in [36]. A combination of three results (4.9)–(4.11) yields the desired conclusion. \(\square \)
Following (3.5) and (3.26), there holds
and
which confer that
Consequently,
where the symbol \(\Vert \textbf{G}\Vert _{k}\) is used to denote its k-norm, \(k\in \{1,2,\infty \}\). From the well-known inequality that \( \Vert \textbf{G}\Vert _2^2\le \Vert \textbf{G}\Vert _1\Vert \textbf{G}\Vert _\infty \), we conclude
Lemma 4.2
Suppose that the conditions in Theorem 2.1 hold. If we choose M in (4.12) as follows
then there exist a positive constant \(\omega _0\) and a positive constant c such that \(\omega \ge \omega _0\),
Proof
We only prove the first result in (4.14), the other is similar. By the definition of norm,
For \(w,v\in L^2(I)\), we express their projection onto \(X_{n}\) as
Two coefficient vectors in (4.16) are denoted by \(\textbf{v}_{n}^-\) and \(\textbf{w}_{n}\), respectively. From (4.16) and the definition of the operators \(\textbf{A}_{n}\) and \(\bar{\textbf{A}}_{n}\), we obtain that
A direct application of the Lebesgue-Riemann theorem produces that
which confers that
where \(\textbf{I}_{n+1}\) is the identity matrix of order \(n+1\). Consequently, there exists a positive constant \(\omega _0\) such that \(\omega \ge \omega _0\),
A combination of two estimates (4.17) and (4.20), we have that
which and the first result (4.12) with the choice of M in (4.13) yield the desired conclusion. \(\square \)
Next we observe that Theorem 2.1 means that there exists a positive constant \(\rho \) such that for \(v\in L^2(I)\),
Theorem 4.1
Suppose that the conditions in Lemma 4.2 hold. Then there exists a positive integer \(n_0\) and one constant \(\omega _0\) such that for \(n\ge n_0\), \(\omega \ge \omega _0\) and \(v\in X_n\)
where \(\rho \) appears in (4.22). Moreover, the numerical solution \(\bar{n}_n\) defined by (3.28) has the estimate
Proof
By using the compactness of the operator \({\mathscr {B}}\), there exists a positive constant \(n_1\) such that \(n\ge n_1\),
On the other hand, if follows from the result (4.14) that there exist a positive integer \(n_2\) and one positive constant \(\omega _0\) such that \(n\ge n_2\) and \(\omega \ge \omega _0,\)
A combination of (4.22), (4.25) and (4.26) and the next result
yields the first desired conclusion (4.23) with \(n_0:=n_1+n_2\).
In order to estimate (4.24), we first observe that
It follows from the estimate (4.6) that we were only required to estimate the second term of the right hand side of (4.27). In fact, employing both sides of (1.1) by \({\mathscr {P}}_n\) yields that
A direct computation of (3.28) and (4.28) confirms that
By Theorem 4.1, there exists a positive integer \(n_0\) such that \(n\ge n_0\),
It is clear that there exists a positive constant \(\omega _0\) such that for \(\omega \ge \omega _0\),
Substituting the results (4.6), (4.13) and the estimate above into the right hand side of Eq. (4.29) produces that
A combination of three estimates (4.27), (4.29) and (4.30) completes the proof. \(\square \)
Theorem 4.1 shows that the approximate equation (3.27) has a unique solution and the approximate solution reaches the optimal convergence order. Next we denote by \(\textrm{cond}(\textbf{G}):=\Vert \textbf{G}\Vert \Vert \textbf{G}^{-1}\Vert \) its spectral condition number for any nonsingular square matrix \(\textbf{G}\). Following Theorem 14.9 in [3], the stability of the corresponding linear system (3.27) is established in the next result.
Theorem 4.2
Suppose that the conditions in Theorem 4.1 hold. Then there exist a positive constant c and a positive integer \(n_0\) and \(\omega _0\) such that \(n\ge n_0\) and \(\omega \ge \omega _0\),
5 Numerical Experiments
In this section, we present two examples to illustrate the effectiveness and accuracy of our proposed method. Here, we compute the Gauss-Jacobi quadrature rule nodes and weights by Theorem 3.4 and Theorem 3.6 discussed in [23]. All computer programs are compiled with the Matlab language. In the following example, the error \(\Vert u-\bar{u}_n\Vert \) is computed by sampling at the points \(\{\tau _j\}=0.01j\) for \(j\in \mathbb {Z}_{100}\), i,e.,
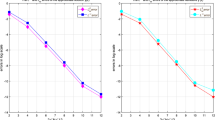
We also choose \(n:=2,4,6,8,10,12\), and \(\omega :=\omega _k:=10^{4k},\ \ k=1,2,3,4\) so as to show the efficiency of our hybrid fractional spectral Galerkin method. Following from the result (4.13) we let \(M:=n^5\).
Example 5.1
In the first example, we suppose that the kernel function \(B:=-1\) and \(\mu :=\frac{1}{2}\). We choose the output function f so that the exact solution \(u(x):=e^{i\omega x} x^{\frac{1}{2}},\ \ \ x\in I\). A direct computation produces that
By the definition of \(\lambda \) in (3.4) we choose \(\gamma :=0.5\) with \(m:=1\), which implies that \(\overline{u}(x^{0.5}), \widetilde{u}(x^{0.5})\in C^\infty (I)\). As expected, the errors show an exponential decay, since in this semi-log representation the error variations are essentially linear versus the degrees of the polynomial (Table 1).
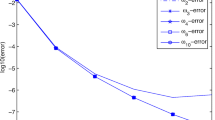
Example 5.2
In the second example, we also let the kernel function \(B:=-1\) and \(\mu :=\frac{1}{3}\). We choose the output function f so that the exact solution \(u(x):= e^{i\omega x}x^{\frac{1}{3}},\ \ \ x\in I\). A direct computation produces that
By the definition of \(\lambda \) in (3.4) we choose \(\gamma :=1/3\) with \(m:=1\), which implies that \(\overline{u}(x^{1/3}), \widetilde{u}(x^{1/3})\in C^\infty (I)\). Hence, the theoretical results shows that the numerical errors will decay with an exponential rate. As expected, the numerical tests accord with the theoretical results since in this semi-log representation the error variations are essentially linear versus the degrees of the polynomial (Table 2) .

6 Conclusion
The main purpose of this paper is to present the singularity and oscillation of the original of second kind classical Volterra integral equations with highly oscillatory and weakly singlar kernels. Then, based on this structure, we have developed an efficient numerical algorithm and then obtained the desired stability and convergence results in the space \(L^2(I)\). In the future work, we will study the fast algorithm for this highly oscillatory problems.
Data Availability
Enquiries about data availability should be directed to the authors.
References
Atkinson, K.E.: The Numerical Solution of Integral Equations of Second Kind. Cambridge University Press, Cambridge (1997)
Brunner, H.: Volterra Integral Equations: An Introduction to Theory and Applications. Cambridge University Press, Cambridge (2016)
Kress, R.: Linear Integral Equations. Springer-Verlag, Berlin (2001)
Brunner, H.: On Volterra integral operators with highly oscillatory kernels. Discret. Contin. Dyn. Syst. 34, 915–929 (2014)
Brunner, H., Ma, Y., Xu, Y.: The oscillation of solutions of Volterra integral and integro-differential equations with highly oscillatory kernels. J. Integral Equ. Appl. 27, 455–487 (2015)
Wang, H., Xiang, S.: Asymptotic expansion and Filon-type methods for Volterra integral equation with a highly oscillatory kernel. IMA J. Numer. Anal. 31, 469–490 (2011)
Xiang, S., Cho, Y.J., Wang, H., Brunner, H.: Clenshaw–Curtis–Filon-type methods for highly oscillatory Bessel transforms and applications. IMA J. Numer. Anal. 31, 1281–1314 (2011)
Xiang, S., Brunner, H.: Effcient methods for Volterra integral equations with highly oscillatory Bessel kernels. BIT Numer. Math. 53, 241–263 (2013)
Wang, Y., Xu, Y.: Oscillation preserving Galerkin methods for Fredholm integral equations of the second kind with oscillatory kernels. (2015) arXiv:1507.01156
Fermo, L., Dermee, C.V.: Volterra integral equations with highly oscillatory kernels: a new numerical method with applications. ETNA 54, 333–354 (2021)
Cai, H.: Oscillation-preserving Legendre–Galerkin methods for second kind integral equations with highly oscillatory kernels. Numer. Algorithms 90, 1090–1115 (2021)
Cai, H.: A fractional spectral collocation for solving second kind nonlinear Volterra integral equations with weakly singular kernels. J. Sci. Comput. 73, 1529–1548 (2019)
Cai, H., Chen, Y.: A fractional order collocation method for second kind Volterra integral equations with weakly singular kernels. J. Sci. Comput. 83, 970–992 (2018)
Chen, S., Shen, J., Wang, L.: Generalized Jacobi functions and their applications to fractional differrential equations. Math. Comput. 85, 1603–1638 (2016)
Chen, S., Shen, J., Mao, Z.: Efficient and accurate spectral methods using general Jacobi Functions for solving Riesz fractional differential equations. Appl. Numer. Math. 106, 165–181 (2016)
Chen, Y., Tang, T.: Convergence analysis of the Jacobi spectral-collocation methods for Volterra integral equations. Math. Comput. 79, 147–167 (2010)
Huang, C., Stynesz, M.: A spectral collocation method for a weakly singular Volterra integral equation of the second kind. Adv. Comput. 42, 1015–1030 (2016)
Huang, C., Stynesz, M.: Spectral Galerkin methods for a weakly singular Volterra integral equation of the second kind. IMA J. Numer. Anal. 37, 1411–1436 (2017)
Hou, D., Xu, C.: A fractional spectral method with applications to some singular problems. Adv. Comput. Math. 43, 911–944 (2017)
Yi, L., Guo, B.: An h-p Version of the continuous Petrov–Galerkin finite element method for Volterra integro-differential equations with smooth and nonsmooth kernels. SIAM J. Numer. Anal. 53, 2677–2704 (2015)
Wang, Z., Guo, Y., Yi, L.: An hp-version Legendre–Jacobi spectral collocation method for Volterra integro-differential equations with smooth and weakly singular kernels. Math. Comput. 86, 2285–2324 (2017)
Sheng, C., Wang, Z., Guo, B.: A multistep Legendre–Gauss spectral collocation method for nonlinear Volterra integral equations. SIAM J. Numer. Anal. 52, 1953–1980 (2014)
Shen, J., Tang, T., Wang, L.: Spectral Methods: Algorithms, Analysis and Applications. Springer Series in Computational Mathematics, Springer, New York (2011)
Iserles, A., Norsett, S.P.: Efficient quadrature of highly oscillatory integrals using derivatives. Proc. Am. Math. Soc. 461, 1383–1399 (2005)
Iserles, A., Norsett, S.P.: Quadrature methods for multivariate highly oscillatory integrals using derivatives. Math. Comput. 75, 1233–1258 (2006)
Domspnguez, V., Graham, I.G., Kim, T.: Filon–Clenshaw–Curtis rules for highly oscillatory integrals with algebraic singularities and stationary points. SIAM J. Numer. Anal. 51, 1542–566 (2013)
Domspnguez, V., Graham, I.G., Smyshlyaev, V.P.: Stability and error estimates for Filon–Clenshaw–Curtis rules for highly oscillatory integrals. IMA J. Numer. Anal. 31, 1253–1280 (2011)
Levin, D.: Analysis of a collocation method for integrating rapidly oscillatory functions. J. Comput. Appl. Math. 78, 131–138 (1997)
Levin, D.: Procedures for computing one- and two-dimensional integrals of functions with rapid irregular oscillations. Math. Comput. 38, 531–538 (1982)
Olver, S.: Fast numerically stable computation of oscillatory integrals with stationary points. BIT Numer. Math. 50, 149–171 (2010)
Olver, S.: Moment-free numerical approximation of highly oscillatory functions. IMA J. Numer. Anal. 26, 213–227 (2006)
Huybrechs, D., Vandewalle, S.: On the evaluation of highly oscillatory integrals by analytic continuation. SIAM J. Numer. Anal. 44, 1026–1048 (2006)
Huybrechs, D., Vandewalle, S.: The construction of cubature rules for multivariate highly oscillatory integrals. Math. Comput. 76, 1955–1980 (2007)
Ma, Y., Xu, Y.: Computing integrals involved the Gaussian function with a small standard deviation. J. Sci. Comput. 78, 1744–1767 (2019)
Ma, Y., Xu, Y.: Computing highly oscillatory integrals. Math. Comput. 87, 309–345 (2018)
Kaneko, H., Xu, Y.: Gauss-type quadratures for weakly singular integrals and their application to Fredholm integral equations of the second kind. Math. Comput. 62, 739–753 (1994)
Funding
The research of this author is supported by the National Natural Science Foundation of China 12171278 and by National Science Foundation of Shandong Province ZR2020MA047 and ZR2022MA068.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author declares that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Cai, H. An Efficient Spectral-Galerkin Method for Second Kind Weakly Singular VIEs with Highly Oscillatory Kernels. J Sci Comput 95, 64 (2023). https://doi.org/10.1007/s10915-023-02180-y
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10915-023-02180-y
Keywords
- Second kind linear VIEs with weakly singular and highly oscillatory kernel
- A fully discrete fractional spectral-Galerkin method
- An optimal convergence order