
Abstract
We propose a Deuflhard-type exponential integrator Fourier pseudo-spectral (DEI-FP) method for solving the “Good” Boussinesq (GB) equation. The numerical scheme is based on a Deuflhard-type exponential integrator and a Fourier pseudo-spectral method for temporal and spatial discretizations, respectively. The scheme is fully explicit and efficient due to the fast Fourier transform. Rigorous error estimates are established for the method without any CFL-type condition constraint. In more details, the method converges quadratically and spectrally in time and space, respectively. Extensive numerical experiments are reported to confirm the theoretical analysis and to demonstrate rich dynamics of the GB equation.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Similar to the Korteweg–de Vries (KdV) equation or cubic Schrödinger equation, the “Good” Boussinesq (GB) equation [1] also gives rise to solitons:
However, the GB equation possesses some remarkable features which make it different from the KdV equation, e.g., two solitary waves can merge into a single wave or develop into the so-called antisolitons [2]. The GB equation was originally introduced to model one-dimensional weakly nonlinear dispersive waves in shallow water [1]. Furthermore, it was extended by replacing the quadratic nonlinearity with a general function of z to model small oscillations of nonlinear beams [3] or the two-way propagation of water waves in a channel [4].
There have been extensive studies for the GB equation in recent decades. For the local well-posedness of the initial value problem, we refer to [5,6,7]. Specifically, the GB equation is locally well posed for initial data in \(H^s({\mathbb {R}})\times H^{s-2}({\mathbb {R}})\) with \(s>-1/2\). In the periodic setting, we refer to [8,9,10,11] for the local well-posedness. More precisely, it was shown in [10] that the initial value problem in \(H^s({\mathbb {T}})\times H^{s-2}({\mathbb {T}})\) is locally well-posed for \(s\ge -1/2\) and ill-posed for \(s<-1/2\). For the numerical and analytical study of the GB equation, it can be traced back to [12], where the soliton interaction mechanism was investigated and some numerical experiments were reported while little analysis was given on the stability and convergence of the methods employed. Since then numerous numerical methods were developed for solving the GB equation. Finite difference methods (FDM) have been developed in [13,14,15]. Particularly, in [15], the nonlinear stability and convergence was shown for a family of explicit finite difference schemes for solving the GB equation under a severe Courant–Friedrichs–Lewy (CFL) condition: \(\varDelta t=O(\varDelta x^2)\) where \(\varDelta t\) and \(\varDelta x\) represent the discretization parameters in time and space, respectively. More competitive Fourier spectral methods were also proposed and analyzed for the GB equation [16,17,18,19]. A second order temporal pseudo-spectral discretization was proposed in [18] and the full order convergence was proved in a weak energy norm: the \(L^2\) norm in z combined with the \(H^{-2}\) norm in \(z_t\) under a similar time step constraint \(\varDelta t=O(\varDelta x^2)\). Such a constraint becomes very restrictive and leads to a high computational cost. The energy norm was improved in [16] with the help of aliasing error control techniques in the Fourier pseudo-spectral space, where a second order temporal scheme was proved to converge unconditionally in a stronger energy norm: the \(H^2\) norm in z combined with the \(L^2\) norm in \(z_t\). However, it requires the solution to be regular enough: \(z\in H^4([0,T];L^2)\cap L^\infty ([0,T];H^{m+4})\cap H^2([0,T];H^4)\) to get an error of \(O(\varDelta t^2+\varDelta x^m)\). An alternative second order (in time) scheme was proposed and analyzed by applying the operator splitting technique in a more recent article [20], and the convergence in the stronger energy norm (given by [16]) was established. There are some other methods in the literatures for solving the GB equation, such as Petrov–Galerkin methods [12], meshless methods [21], integral equation preconditioned deferred correction methods [22], energy-preserving methods [19, 23,24,25] and Runge–Kutta exponential integrators [26].
Nowadays, exponential time integrators have been widely applied for parabolic and hyperbolic equations [26,27,28,29]. Particularly, several efficient schemes were proposed for solving the GB equation [26] based on fourth-order exponential integrators of Runge–Kutta type. However, nothing concerning the stability and convergence results was involved. Very recently, two low regularity exponential-type integrators were proposed and analyzed for the GB equation [28] based on a technique of twisting variable. The advantage of the low regularity exponential-type integrators is that it requires less regularities on the solution to obtain the same accuracy, compared to the classical exponential integrators. However, the design of low regularity integrators depends strongly on the particular form of the nonlinearity. Such an integrator can hardly be extended to more general equations, e.g., the GB equation with a general nonlinearity.
In the present work, we consider a second-order Deuflhard-type exponential integrator for solving the GB equation. Our work differs from the existing studies in the literatures in the following two aspects: (i) we consider the GB equation with a general nonlinearity; (ii) an unconditional convergence is proved in a general energy norm: the \(H^m\) norm in z combined with the \(H^{m-2}\) norm in \(z_t\) for \(m>1/2\).
The rest of this paper is organized as follows. In Sect. 2, we propose the Deuflhard-type exponential integrator Fourier pseudo-spectral (DEI-FP) method for the GB equation. The main error estimate is given and proved in Sect. 3. Numerical results are reported in Sect. 4 to illustrate the proved convergence results and to demonstrate the complicated dynamics of the GB equation. Finally, some concluding remarks are drawn in Sect. 5.
2 A Deuflhard-Type Exponential Integrator Fourier Pseudo-Spectral Method
In this section, we present the exponential integrator Fourier pseudo-spectral (DEI-FP) method for the GB equation, based on a Deuflhard-type time integrator in combination with a Fourier pseudo-spectral discretization in space.
For implementation issues, we consider the GB equation with a general nonlinearity with periodic boundary conditions imposed:
where \(f(\cdot )\) is a smooth functional. For integer \(m>0\), \(\varOmega =[a, b]\), we denote by \(H^m(\varOmega )\) the standard Sobolev space with norm
For \(m=0\), the space is exactly \(L^2(\varOmega )\) and the corresponding norm is denoted as \(\Vert \cdot \Vert \). Furthermore, we denote by \(H_{\mathrm p}^m(\varOmega )\) the subspace of \(H^m(\varOmega )\) which consists of functions with derivatives of order up to \(m-1\) being \((b-a)\)-periodic. We see that the space \(H^m(\varOmega )\) with fractional m is also well-defined which consists of functions such that \(\Vert \cdot \Vert _m\) is finite.
For the full discretization of (1.1), we introduce some discrete spaces. Choose a mesh size \(h:=(b-a)/M\) with M a positive integer, and a time step \(\tau >0\). Denote the grid points and time steps as
Denote
For any function \(\psi (x)\in L^2(\varOmega )\) and \(\phi (x)\in C_0(\overline{\varOmega })\) or vector \(\phi =(\phi _0,\phi _1,\ldots ,\phi _M)^T\in X_M\), let \({\mathcal {P}}_M: L^2(\varOmega )\rightarrow Y_M\) be the standard \(L^2\)-projection operator, and \(I_M: C_0(\overline{\varOmega })\rightarrow Y_M\) or \(I_M: X_M\rightarrow Y_M\) be the standard interpolation operator as
where \(\widehat{\psi }_l\) and \(\widetilde{\phi }_l\) are the Fourier and discrete Fourier transform coefficients of the function \(\psi (x)\) and vector \(\phi \) (with \(\phi _j=\phi (x_j)\) when involved), respectively, defined as
Concerning the projection and interpolation operators, we review the standard estimates for the errors.
Lemma 2.1
[30] For any \(0 \le \mu \le k\), we have
Moreover, if \(k>1/2\), we have
Here \(C>0\) is a generic constant independent of h and v.
A Fourier pseudo-spectral method for discretizing (2.1) is to find
such that
Substituting (2.7) into (2.8) and noticing the orthogonality of \(\{e^{i\mu _l(x-a)}: -M/2\le l<M/2\}\), we obtain around time \(t_k=k\tau \ (k\ge 0)\)
where \(\rho =f(z_{_M})\) and \(\theta _l=\sqrt{\mu _l^2+\mu _l^4}\). Applying the variation-of-constants formula [29] for \(k\ge 0\) and \(s\in {\mathbb {R}}\), the general solution of (2.9) can be written as follows for any \(s\in {\mathbb {R}}\),
Differentiating (2.10) with respect to s, we obtain
Evaluating (2.10) and (2.11) with \(s=\tau \) and approximating the integral by the trapezoid rule or the Deuflhard-type quadrature [29, 31], we immediately get
For implementation, the integrals for computing the Fourier transform coefficients are usually approximated by the numerical quadratures of (2.4). Let \(z_j^k\) and \(\dot{z}_j^k\) be the approximations of \(z(x_j,t_k)\) and \(\partial _t z(x_j,t_k)\), respectively, for \(0\le j<M\) and \(k\ge 0\); and denote \(z^k\) and \(\dot{z}^k\) as the vectors with components \(z_j^k\) and \(\dot{z}_j^k\), respectively. Choosing \(z_j^0=z_0(x_j)\), \(\dot{z}_j^0=z_1(x_j)\) for \(0\le j<M\), a Fourier pseudo-spectral discretization for the problem (2.1) reads
where
The above scheme is clearly explicit and very efficient due to the fast discrete Fourier transform. The memory cost is O(M) and the computational cost per time step is \(O(M\ln (M))\).
3 Convergence Analysis
For simplicity of notation, we denote the trigonometric interpolations of numerical solutions of (2.12) as
Define the error functions as
Then we have the following error estimates for (2.12) with (2.13).
Theorem 3.1
Suppose \(m>1/2\) and \(\sigma \ge 4\). Let the solution of the GB equation (2.1) satisfies the regularity properties \(z\in C([0,T]; H^{m+\sigma }_{\mathrm{p}})\bigcap C^1([0,T]; H^{m+\sigma -2}_{\mathrm{p}})\cap C^2([0,T]; H^{m}_{\mathrm{p}})\). There exist \(\tau _0>0\), \(h_0>0\) sufficiently small such that when \(\tau \le \tau _0\) and \(h\le h_0\), we have the following error estimate for the numerical scheme (2.12) with (2.13):
Furthermore, we have
where \(K_1:=\Vert z\Vert _{L^\infty ([0,T]; H^m)}\) and \(K_2:=\Vert \partial _t z\Vert _{L^\infty ([0,T]; H^{m-2})}\).
It is well-known that the existence of aliasing error in the nonlinear term brings a serious challenge in the numerical analysis of Fourier pseudo-spectral approximation. Some aliasing error control techniques have been developed for the Fourier pseudo-spectral method in recent years for the Navier–Stokes equations [32], the viscous Burgers’ equation [33], the Cahn–Hilliard equation [34] and the GB equation [16]. Here we present an alternative proposition established in [35], which allows us to bound the aliasing error for the nonlinear term and will be critical to our analysis.
Proposition 1
[35] For any function \(g\in C^\infty ({\mathbb {C}}, {\mathbb {C}})\) and \(s >1/2\), there exists a nondecreasing function \(\chi _g: {\mathbb {R}}^+\rightarrow {\mathbb {R}}^+\) such that
For all \(v, w\in B_R^s:=\{u\in H^s: \Vert u\Vert _s\le R\}\), we have
where \(\alpha (g, R)=\Vert g'(0)\Vert _s+R\chi _{g'}(cR)\) is nondecreasing with respect to R, with \(c>0\) being the constant for the Sobolev imbedding \(\Vert \cdot \Vert _{L^\infty }\le c\Vert \cdot \Vert _s\).
Proof of Theorem 3.1
We deduce (3.1) and (3.2) by induction. For \(n=0\), (3.1) is obvious by noticing
Furthermore, (3.2) can be obtained by the triangle inequality when \(\tau \) and h are small enough.
Now assume (3.1) and (3.2) are valid for \(n=0, \ldots , k<T/\tau \), next we show (3.1) and (3.2) are true for \(k+1\). To precede, denote the projected error functions as
where the corresponding coefficients satisfy
Applying the triangle inequality and Lemma 2.1, we have
thus it suffices to show (3.2) and
Define the local truncation errors as
where \(\widehat{\xi ^n_0}=\widehat{\dot{\xi }^n_0}=0\), and for \(l\ne 0\),
with \(\rho (x,s)=f(z(x,s))\). Adding the local truncation errors from the scheme, we are led to the error equations as
where
It follows from (3.6) that
which yields for \(l\ne 0\),
Denote
By definition (2.2), we have
where \(p \lesssim q\) means there exist a constant \(C>0\) such that \(p\le C q\) and \(p\sim q\) represents \(q\lesssim p\lesssim q\). Noticing that
this together with (3.7) derives that
Next we estimate the local error and the error for the nonlinear term, respectively.
Local error. Applying the quadrature error
we get for \(l\ne 0\),
where
Applying the Hölder’s inequality, we get for \(l\ne 0\),
Thus
Noticing that
recalling \(m>1/2\), using the bilinear estimate [36]
and Proposition 1, we yield that
where \(L=\Vert z\Vert _{L^\infty ([0,T]; L^\infty )}\), which is finite by recalling that \(z\in C([0,T]; H^{m+\sigma }_{\mathrm{p}})\). By the assumptions on the regularities of z, we get that
Similar approach leads to that
Hence we get the estimate on the local errors
where \(M_1\) depends on m, f, \(\Vert z\Vert _{L^\infty ([0,T]; H^{m+4})}\), \(\Vert \partial _tz\Vert _{L^\infty ([0,T]; H^{m+2})}\) and \(\Vert \partial _t^2z\Vert _{L^\infty ([0,T]; H^{m})}\).
Error of nonlinear terms. By definition, we have
Similar approach yields that
To estimate this, we need an a prior bound for \(\Vert z_I^{n+1}\Vert _m\). It follows from the scheme that
when \(\tau \le 1\). Here we have used the property (3.10), \(\widetilde{\dot{z}^n_0}=\widetilde{\dot{z}^{k-1}_0}=\ldots =\widetilde{\dot{z}^0_0}\), the induction and the inequality
with \(c_1^2=1+\frac{(b-a)^2}{4\pi ^2}\). Hence combining (3.12), (3.13) and (3.14), we get
Combining (3.9), (3.11) and (3.15), we derive that
Summing the above inequality for \(n=0, 1, \ldots , k\), one gets
Applying the discrete Gronwall’s inequality, when \(\tau \) is sufficiently small, we have
which immediately gives (3.5) by recalling (3.8). Finally (3.2) can be obtained by (3.1) and the triangle inequality. \(\square \)
4 Numerical Experiments
In this section, we first test the order of accuracy of the DEI-FP scheme (2.12) with (2.13). Then we apply this method to investigate some long time dynamics of the GB equation. For all the numerical experiments, we choose the commonly used nonlinearity \(f(z)=z^2\).
4.1 Accuracy Test
In the first experiment, we test the convergence of the Deuflhard-type exponential integrator Fourier pseudo-spectral scheme (2.12) with (2.13) for the solitary wave solution.
Example 1
The well-known soliton solution of the GB equation (1.1) is given by [22, 28]
where A, \(x_0\) and v represent the amplitude, the initial location and the velocity of the soliton, respectively.
Noticing that the solitary wave decays exponentially in the far field, this enables us to consider the GB equation on a bounded interval \([-a, a]\) with periodic boundary conditions when a is large enough such that the artificial boundaries are located far out enough for the theoretical solution to satisfy the periodic boundary conditions except for a negligible remainder. Here we choose \(A=3/8\), \(x_0=0\) and the torus \(\varOmega =(-60,60)\). Denote \(z^{\tau ,h}\) and \(\dot{z}^{\tau ,h}\) as the numerical solutions obtained by the DEI-FP method with mesh size h and time step \(\tau \) for approximating the exact solutions \(z(\cdot ,t)\) and \(\partial _tz(\cdot ,t)\). To quantify the numerical error, we define the error function as
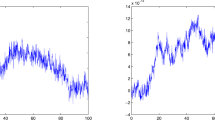
Figure 1 displays the spatial and temporal errors of the DEI-FP method (2.12)–(2.13) and the second-order low-regularity exponential integrator (LEI) proposed in [28] for the solitary wave solution at \(T=2\) under various values of \(\tau \) and h. The errors are quantified in several norms with \(m=1,2,3\). For spatial error analysis, we take a tiny time step \(\tau =10^{-6}\) such that the temporal error is negligible; for temporal error, we set the mesh size \(h=1/8\) such that the spatial error can be ignorable. It can be clearly observed that the scheme converges spectrally and quadratically in space and time, respectively, which confirms the theoretical result in Theorem 3.1. Moreover, for solitary solutions, Fig. 1 also suggests that the LEI in [28] is more accurate than the DEI-FP for the same time step size. For a numerical comparison between the second-order DEI-FP method and the LEI method in [28] for rough initial datum, we refer to [28], where extensive experiments show the superiority of LEI since it requires less regularity on the solution to obtain the same second-order convergence rate. However, as explained in Sect. 1, the DEI-FP method works for general nonlinearities, for which the LEI in [28] is hardly applicable.

Spatial (left) and temporal (right) errors of the DEI-FP scheme as well as the LEI method proposed in [28] for the soliton solution under different mesh size and time step size
Next we investigate the long time behavior of the DEI-FP method. Noticing that for the soliton solution (4.1), \(\int _\varOmega \partial _t z(x, 0)dx=0\), this implies that the mass is conserved:
Figure 2 shows the conservation law of mass for the numerical solitary wave solution (left) and the long time error of the DEI-FP scheme (right). Here the solution is obtained on a bounded interval \(\varOmega =[-300, 300]\) under \(h=1/8\) and \(\tau =0.001\). We clearly see that the DEI-FP method is reliable and excellent for long time simulations.

Conservation of mass (left) and long-time errors of the DEI-FP method (right)
4.2 Birth of Solitons
Example 2
In this experiment, we still use the initial data for the solitary wave solution (4.1):

Evolution of the solitary wave for initial data (4.2) with different A: \(A=1.1, 1.3, 1.4, 1.5\) (from top to bottom)
Computations are done for \(h=1/8\) and \(\tau =0.001\) on the interval \(\varOmega =[-400, 400]\). We find that for small A, the numerical solution agrees with the exact solution well. However, for larger A, the soliton fails to preserve its shape and splits into two pulses as time evolves. Figure 3 shows the evolution of the soliton for different amplitudes \(A=1.1, 1.3, 1.4, 1.5\). It can be observed that for smaller A, the soliton preserves its shape and velocity well, which coincides with the exact solitary wave solution (4.1). However, for the initial soliton with larger amplitude, the initial pulse is preserved for a period and then splits into two solitons moving in the opposite directions. This suggests an instability occurs around this kind of initial condition. Furthermore, the larger A is, the smaller the difference between the amplitudes of the two solitons is. Particularly, for \(A=1.5\) which corresponds to null initial velocity \(z_1(x)=0\), the soliton finally splits into two identical solitons with equal amplitudes and equal velocities traveling in opposite directions.
For comparison, we also investigate the evolution of arbitrary pulse with zero initial velocity:
which has been studied in the literature [25]. Figure 4 displays the dynamics of the soliton with null initial velocity and different amplitudes \(A=0.6, 1.4\). Different from the case with non-zero initial velocity, the soliton always splits into two pulses with equal amplitudes and equal velocities propagating in opposite directions. Besides the two main solitons, some dispersive oscillations are emitted in front of the main solitons after splitting as long as \(A<1.5\). This is different from that of the improved Boussinesq equation where the emitting oscillations are between the main solitons [37]. Furthermore, the smaller the amplitude is, the stronger the additional emitting wave is.

Evolution of the solitary wave with zero initial velocity (4.3) for different A : \(A=0.6, 1.4\) (from top to bottom)
4.3 Interaction of Two Solitons
In this section, we apply the DEI-FP method to investigate the interaction of two solitary waves traveling in the opposite/same directions. The initial data is chosen as
It represents two solitary waves located initially at the positions \(x=x_1\) and \(x=x_2\), respectively, moving to the right or left depending on the sign of the velocity \(v_k\). Computations are done for \(h=1/8\) and \(\tau =0.001\) on the interval \(\varOmega =[-400, 400]\). We test the following cases:
- (1)
Elastic collision:
- (i).
\(x_2=-x_1=50\), \(A_1=0.2\), \(A_2=0.3\), \(v_1>0\), \(v_2<0\);
- (ii).
\(x_2=-x_1=10\), \(A_1=0.2\), \(A_2=0.5\), \(v_1>0\), \(v_2<0\);
- (i).
- (2)
Blow-up phenomenon:
- (iii).
\(x_2=-x_1=50\), \(A_1=0.37\), \(A_2=0.37\), \(v_1>0\), \(v_2<0\);
- (iv).
\(x_2=-x_1=50\), \(A_1=0.38\), \(A_2=0.38\), \(v_1>0\), \(v_2<0\);
- (v).
\(x_2=-x_1=50\), \(A_1=0.3\), \(A_2=0.45\), \(v_1>0\), \(v_2<0\);
- (vi).
\(x_2=-x_1=50\), \(A_1=0.3\), \(A_2=0.46\), \(v_1>0\), \(v_2<0\);
- (iii).
- (3)
Interaction with static solitons:
- (vii).
\(x_2=-x_1=50\), \(A_1=0.37\), \(A_2=1.5\), \(v_1>0\), \(v_2=0\);
- (viii).
\(x_2=-x_1=50\), \(A_1=0.38\), \(A_2=1.5\), \(v_1>0\), \(v_2=0\);
- (ix).
\(x_2=-x_1=30\), \(A_1=A_2=1.5\), \(v_1=v_2=0\);
- (x).
\(x_2=-x_1=20\), \(A_1=A_2=1.5\), \(v_1=v_2=0\);
- (vii).
- (4)
Overtaking interaction:
- (xi).
\(x_1=-50\), \(x_2=-80\), \(A_1=0.2\), \(A_2=1\), \(v_1>0\), \(v_2>0\).
- (xi).

Elastic collision of two solitons for Cases (i)–(ii) (from top to bottom)

Collision of two solitons for Cases (iii)–(vi) (from top to bottom, from left to right)
Figure 5 shows the evolution of \(-z(x,t)\) at different time for elastic collision (Cases (i)–(ii)). We see that the two solitons which are initially located at the positions \(x_1=-50\) and \(x_2=50\) moving towards each other with velocities \(v_1\) and \(v_2\), respectively. As time progresses they collide, stick together and split after collision without changing their shape and velocities. It can be clearly seen that the collision is elastic and no radiation is generated. Similar phenomena occurs for Case (ii) where the two solitons contact each other initially. This is different from the inelastic collision for the improved Boussinesq equation, where small rediation is created after the interaction between the solitons [37].
Figure 6 investigates the blow-up phenomenon for the head-on collision. For \(A_1=A_2=0.38\), the solution blows up quickly after \(t=68\). Similar blow-up occurs for \(A_1=0.3\), \(A_2=0.46\) after \(t=70\). We see that for \(A_1=A_2\), there exists \(A_c\in (0.37, 0.38)\) such that the solution blows up in finite time when \(A_1=A_2>A_c\). Similarly, for fixed \(A_1=0.3\), there exists \(A_c\in (0.45, 0.46)\) such that the solution blows up in finite time when \(A_2>A_c\). This blow-up phenomenon was revealed in [38] for two solitons with the same initial amplitude.

Collision of two solitons for Cases (vii)–(viii) (from top to bottom)
Figure 7 shows the interaction of two solitons, one of which has initial amplitude \(A=1.5\) and null initial velocity. As time evolves, the static soliton splits into two identical pulses propagating in different directions. Then one of the splitting solitons collides with the pulse moving towards it. When the amplitude is not large enough, they collide and split again without changing their shape and velocities (cf. Fig. 7 top). While if the amplitude is large enough, blow-up occurs quickly after the collision (cf. Fig. 7 bottom).

Evolution of two static solitons for Cases (ix)–(x) (from top to bottom)

Overtaking interaction of two solitons traveling in the same direction
Figure 8 displays the evolution of two solitons with initial amplitudes \(A_1=A_2=1.5\) and zero initial velocities. When the two solitons are well-separated initially (Case (ix)), each pulse splits into two solitons spreading towards opposite directions. Then the two head-on pulses collide and recover as one solitary wave with amplitude \(A=1.5\). The recovered soliton keeps static for a period of time and finally splits into two equal pulses moving in the opposite directions. However, when the two solitons are not initially well-separated (Case (x)), the recovered solitary wave blows up quickly after \(t=95\). As far as we know, this phenomena of recovering as a static soliton after collision has not been found in the existing literature.
Figure 9 displays the overtaking interaction of two solitons moving in the same direction with different velocities. The faster wave catches up with the slower one and leaves it behind as time evolves. Both solitons recover their shape and velocities after interaction. Noticing that the amplitude decreases during the interaction, which is completely different from the head-on interaction case, where the amplitude is strengthened during the collision (cf. Fig. 5). In addition, the overtaking interaction is also elastic, which is different from the case for the improved Boussinesq equation, where some small waves are emitted during the overtaking process [37].
5 Conclusions
A Deuflhard-type exponential integrator was proposed and analyzed for the “Good” Boussinesq (GB) equation with a general nonlinearity. The method was proved to converge unconditionally at the second order in time and spectrally in space, respectively, in a generic energy norm. Specifically, it requires four additional orders of regularities in space on the solution to attain the quadratic convergence rate in time. Numerical results confirm our analytical results. Extensive numerical experiments reveal rich and complicated dynamical phenomena for the GB equation, such as elastic interaction, blow-up phenomena, recovering as a static soliton and so forth.
References
Boussinesq, J.: Théorie des ondes et des remous qui se propagent le long d’un canal rectangulaire horizontal, en communiquant au liquide contenu dans ce canal des vitesses sensiblement pareilles de la surface au fond. J. Math. Pures Appl. 17, 55–108 (1872)
Manoranjan, V.S., Ortega, T., Sanz-Serna, J.M.: Soliton and antisoliton interactions in the good Boussinesq equation. J. Math. Phys. 29, 964–1968 (1988)
Varlamov, V.: Eigenfunction expansion method and the long-time asymptotics for the damped Boussinesq equation. Discrete Contin. Dyn. Syst. 7, 675–702 (2001)
Bona, J.L., Smith, R.A.: A model for the two-way propagation of water waves in a channel. Math. Proc. Camb. Philos. Soc. 79, 167–182 (1976)
Bona, J.L., Sachs, R.L.: Global existence of smooth solutions and stability of solitary waves for a generalized Boussinesq equation. Commun. Math. Phys. 118, 15–29 (1988)
Farah, L.: Local solutions in Sobolev spaces with negative indices for the good Boussinesq equation. Commun. Partial Differ. Equ. 34, 52–73 (2009)
Kishimoto, N., Tsugawa, K.: Local well-posedness for quadratic nonlinear Schrödinger equations and the good Boussinesq equation. Differ. Integral Equ. 23, 463–493 (2010)
Fang, Y., Grillakis, M.: Existence and uniqueness for Boussinesq type equations on a circle. Commun. Partial Differ. Equ. 21, 1253–1277 (1996)
Farah, L., Scialom, M.: On the periodic good Boussinesq equation. Proc. Amer. Math. Soc. 138, 953–964 (2010)
Kishimoto, N.: Sharp local well-posedness for the good Boussinesq equation. J. Differ. Equ. 254, 2393–2433 (2013)
Oh, S., Stefanov, A.: Improved local well-posedness for the periodic good Boussinesq equation. J. Differ. Equ. 254, 4047–4065 (2013)
Manoranjan, V.S., Mitchell, A., Morris, J.L.: Numerical solutions of the good Boussinesq equation. SIAM J. Sci. Comput. 5, 946–957 (1984)
Bratsos, A.G.: A second order numerical scheme for the solution of the one-dimensional Boussinesq equation. Numer. Algorithms 46, 45–58 (2007)
El-Zoheiry, H.: Numerical investigation for the solitary waves interaction of the good Boussinesq equation. Appl. Numer. Math. 45, 161–173 (2003)
Ortega, T., Sanz-Serna, J.M.: Nonlinear stability and convergence of finite-difference methods for the good Boussinesq equation. Numer. Math. 58, 215–229 (1990)
Cheng, K., Feng, W., Gottlieb, S., Wang, C.: A Fourier pseudo-spectral method for the good Boussinesq equation with second-order temporal accuracy. Numer. Methods Partial Differ. Equ. 31, 202–224 (2015)
Frutos, J.D., Ortega, T., Sanz-Serna, J.M.: A Hamiltonian explicit algorithm with spectral accuracy for the good Boussinesq equation. Comput. Methods Appl. Mech. Eng. 80, 417–423 (1990)
Frutos, J.D., Ortega, T., Sanz-Serna, J.M.: Pseudo-spectral method for the good Boussinesq equation. Math. Comput. 57, 109–122 (1991)
Yan, J., Zhang, Z.: New energy-preserving schemes using Hamiltonian boundary value and Fourier pseudo-spectral methods for the numerical solution of the good Boussinesq equation. Comput. Phys. Commun. 201, 33–42 (2016)
Zhang, C., Wang, H., Huang, J., Wang, C., Yue, X.: A second order operator splitting numerical scheme for the good Boussinesq equation. Appl. Numer. Math. 119, 179–193 (2017)
Dehghan, M., Salehi, R.: A meshless based numerical technique for traveling solitary wave solution of Boussinesq equation. Appl. Math. Model. 36, 1939–1956 (2012)
Zhang, C., Huang, J., Wang, C., Yue, X.: On the operator splitting and integral equation preconditioned deferred correction methods for the Good Boussinesq equation. J. Sci. Comput. 75, 687–712 (2018)
Cai, J., Wang, Y.: Local structure-preserving algorithms for the good Boussinesq equation. J. Comp. Phys. 239, 72–89 (2013)
Chen, M., Kong, L., Hong, Y.: Efficient structure-preserving schemes for good Boussinesq equation. Math. Meth. Appl. Sci. 41, 1743–1752 (2018)
Jiang, C., Sun, J., He, X., Zhou, L.: High order energy-preserving method of the good Boussinesq equation. Numer. Math. Theor. Meth. Appl. 9, 111–122 (2016)
Mohebbi, A., Asgari, Z.: Efficient numerical algorithms for the solution of good Boussinesq equation in water wave propagation. Comput. Phys. Commun. 182, 2464–2470 (2011)
Hochbruck, M., Ostermann, A.: Exponential integrators. Acta Numer. 19, 209–286 (2010)
Ostermann, A., Su, C.: Two exponential-type integrators for the good Boussinesq equation. Numer. Math. 143, 683–712 (2019)
Zhao, X.: On error estimates of an exponential wave integrator sine pseudo-spectral method for the Klein–Gordon–Zakharov system. Numer. Methods Partial Differ. Equ. 32, 266–291 (2016)
Shen, J., Tang, T.: Spectral and High-Order Methods With Applications. Science Press, Beijing (2006)
Deuflhard, P.: A study of extrapolation methods based on multistep schemes without parasitic solutions. ZAMP 30, 177–189 (1979)
Gottlieb, S., Tone, F., Wang, C., Wang, X., Wirosoetisno, D.: Long time stability of a classical efficient scheme for two dimensional Navier–Stokes equations. SIAM J. Numer. Anal. 50, 126–150 (2012)
Gottlieb, S., Wang, C.: Stability and convergence analysis of fully discrete Fourier collocation spectral method for 3-D viscous Burgers’ equation. J. Sci. Comput. 53, 102–128 (2012)
Cheng, K., Wang, C., Wise, S.M., Yue, X.: A second-order, weakly energy-stable pseudo-spectral scheme for the Cahn–Hilliard equation and its solution by the homogeneous linear iteration method. J. Sci. Comput. 69, 1083–1114 (2016)
Chartier, Ph, Méhats, F., Thalhammer, M., Zhang, Y.: Improved error estimates for splitting methods applied to highly-oscillatory nonlinear Schrödinger equations. Math. Comp. 85, 2863–2885 (2016)
Adams, R.A., Fournier, J.J.: Sobolev Spaces. Elsevier, New York (2003)
Su, C., Muslu, G. M.: An exponential integrator sine pseudo-spectral method for the generalized improved Boussinesq equation. preprint (2020)
Ismail, M.S., Mosally, F.: A fourth order finite difference method for the good Boussinesq equation. Abs. Appl. Anal. 2014, 323260 (2014)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This first author was supported by the Alexander von Humboldt Foundation and the second author was supported by NSFC (No. 11801183).
Rights and permissions
About this article

Cite this article
Su, C., Yao, W. A Deuflhard-Type Exponential Integrator Fourier Pseudo-Spectral Method for the “Good” Boussinesq Equation. J Sci Comput 83, 4 (2020). https://doi.org/10.1007/s10915-020-01192-2
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10915-020-01192-2