
Abstract
The elytra can protect the body and hind wings of the beetle by absorbing the impact energy and resisting damage from outside loading. In this paper, we firstly observed the microstructures of hollow column and pole canal in the ladybird beetle elytra and revealed the relationship between them. A bionic energy-absorbing structure inspired by ladybird beetle elytra was proposed, and a micron-scale finite element model was built. The mechanical characteristics of bionic structures with and without poles under axial impact loading were investigated by numerical simulations. It could be obtained that the poles could absorb the impact energy by its deformation. Then the parameter studies including the different impact velocities, the different column diameters, and the different thickness of cuticle were carried out. This parameter study shows that geometric variations and impact velocity have a significant influence on mechanical properties.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
The study of biological materials within materials science provides the nexus where the fields of physics, engineering, chemistry, and biology converge to understand and harness the vast body of knowledge that can be learned from the natural world [1, 2]. The findings of this research provide for better biological understanding of the complex and unique organisms and structures in beetle elytra [3, 4]. In spite of the fact that beetle species evolves on the earth for estimated several million years, the internal structure and material properties of beetle elytra remain largely unexplored.
During the past several decades, many researches of internal structure of beetle elytra have been carried out using numerical simulations [5,6,7] and experimental tests [8, 9]. Chen et al. investigated the 3D microstructure of the trabeculae in beetle and proposed the trabeculae honeycomb of the beetle elytra [10,11,12,13,14]. They compared two kinds of beetle elytra and found that the trabeculae of Allomyrina dichotoma are slender, whereas those of Prosopocoilus inclinatus are stubby. Dai et al. studied the microstructure and mechanical properties of the elytra of beetles [15]. Clark et al. found a continuum in puncture resistance, tensile strength, and strain energy storage between the three species, which were greatest in G. portentosa, moderate in B. craniifer, and smallest in P. Americana. The internal structural and mechanical properties of ladybird beetle cuticle are still unexplored, even though some surface study has been carried out [16].
Sandwich structures are made of two face skin with high bending stiffness enclosing a lightweight core [17]. Sandwich structures have also shown the remarkable characteristics on energy absorption [18,19,20]. It has been therefore extensively used in automotive, aerospace, and marine engineering [21, 22]. Although the mechanical properties of sandwich structures have been extensively analyzed during the last decades [23, 24], the bio-mimetic sandwich structure was still not investigated on the view of micron level. Fabrizio et al. described the development of analytical model to identify and predicted the cyclic fatigue behavior of composite sandwich panels subjected to cyclic fatigue loading under three-point bending conditions [25]. Zhang et al. described the manufacturing and testing of metal rubber (MR) samples produced from nickel-based superalloys and subjected to compression loading in quasi-static regime, three batches of MRs with different relative densities have been fabricated, and their mechanical properties have been investigated at different maximum strains [26]. Chen et al. investigated the compressive mechanical properties and deformation mode of honeycomb plate inspired by beetle elytra [27,28,29].
In this paper, we analyzed the microstructures of hollow column and pole canal in the ladybird beetle elytra and revealed the relationship between them. Then a bionic structure inspired from the ladybird beetle elytra was proposed, and a micron-scale finite element model was built. The total deformation of bionic structures with and without poles under axial impact loading was investigated by numerical simulations. In addition, a parameter study of different impact velocities and different column inside diameters was carried out.
Materials and methods
Sample preparation
The exoskeletons investigated are from species of the Coccinella septempunctata that were collected during the June and July 2017 in the local parks in Beijing, China, and then stored in 70% ethanol alcohol at 4 °C in the laboratory to study. Before microscopy, specimens were dried for at least 24 h at room temperature. Although this processing step may cause some deformations in wing shape, the drying process was important to obtain high-quality images. After drying, the forewing of each specimen was removed for morphological investigations.
Scanning electron microscope
Specimens were fixed in alcohol for 24 h. Then the forewings of the ladybird were removed from the body. Preparations were mounted onto SEM holders and sputter-coated with gold–palladium (10 nm) and examined in a SEM (EVO18, Zeiss, Germany) at 2.00 kV. Measurements of structures were made from digital pictures using image analysis software.
Microstructural observations
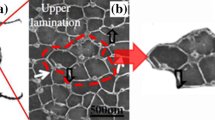
Figure 1 shows the internal structure and surface morphology of beetle elytra. Figure 1a, b shows the magnified image of beetle elytra in cross section, and Fig. 1c, d shows the microscopic morphology of the surface of the beetle elytra. The overall thickness of the elytra of the C. septempunctata varies from 50 to 60 μm. It could be observed that some hollow columns exist in the elytra, as shown in Fig. 1a, b. According to previous studies [7], the columns have the hollow structures, and this could minimize the weight of the beetle itself, thus promoting the flight performance of the insect. l 1 and l 2 (the red arrows in Fig. 1a) represent the length of the column and the thickness of the exoskeleton, respectively. d 1 (the red arrow in Fig. 1b) represents the outer diameter of the column structure. There exists a pore on the surface of the cuticle above each hollow column structure (the yellow triangle in Fig. 1a, b), and d 2 represents the diameter of the pore. According to previous studies [10], the pole canals pass through the beetle cuticle and connect the hollow column structure. The density of the pole canals on the cuticle surface is relatively uniformed distribution, and the interval of any two pore canals varies from 20 to 40 microns, as shown in Fig. 1c. The structure in a square region (the red shadow in Fig. 1d) including nine pole canals has been chosen to build the bionic model for the following numerical simulation.

Microstructure of the beetle elytra: a the column in the beetle elytra; b cross section of the hollow column; c, d the surface morphology of the beetle elytra. Scale bars = 10 μm (a, c), 20 μm (d)
Numerical simulation
Structure design
According to the structure from Fig. 1, a model with nine hollow columns is built as shown in Fig. 2. The wall thickness of hollow columns is 3 μm, the internal diameter of hollow columns is d, the heights of hollow columns are 50 μm, the thickness of cuticle is 30 μm, and the diameter of pole canals which in the cuticle is 5 μm. The bottom layer of the bionic structure is 5 μm. In this study, the hollow columns are uniformly distributed.

Configuration of the bionic structure: a the top view and b the side view
The schematic of the finite element model with axial impact loading is shown in Fig. 3. The bottom layer of the bionic structure and the cuticle structure (the red point in Fig. 3) are fixed. The impactor with an initial velocity is set as rigid body. An automatic contact setup is used in the numerical simulation to consider the contact caused by the deformation of the cuticle structure and hollow column structure during crushing.

Schematic of the calculation finite element model with axial impact loading
Finite element model
The finite element simulation is carried out using the commercial software ANSYS 16.2. The bionic structure configurations are modeled in ANSYS workbench. The mesh of bionic structure and solid impactor are built using tetrahedral meshes and hexahedron meshes, responsibility, as shown in Fig. 4. The mesh element size of bionic structure and solid impactor is 5 and 1.5 μm, responsibility.

Cross section of finite element model with bionic structure and solid impactor
The role of pole canal in energy absorption
From the view of biology, the functions of the pores in the ex-cuticle mainly involve the delivery of substances and the regulation of temperature. For the energy absorption, no relevant studies have been carried out. Because of the existence of poles, ex-cuticle which was compact originally has the mechanical defects. It not only causes the stress concentration but also produce the initial crack. Under the condition of the repeated impact or compression from the outside loading in a long term, initial cracks in the ex-cuticle will make more damage for the elytra. In this study, the significance of the pole canals is discussed by comparing total deformations of the bionic structures with and without poles.
The total deformation of the bionic structure without pole canals under the impact loading is shown in Fig. 5a, c, e, and the total deformation of the bionic structure without pole canals under the impact loading is shown in Fig. 5b, d, f. For simulating the situation of falling from high places or hitting by something from outside, the velocity of the impactor is set as 10 m/s in the numerical simulation. The material of the bionic structure is employed by polyethylene. The wall of hollow column in the center of the bionic structure presents extremely S-type bending, as shown in Fig. 5e. The bottom side of the pole in the structure’s center shows obvious expansion, and the initial diameter expands from 3 to 10 μm, as shown in Fig. 5f, while the hollow column in the center of bionic structure without poles shows slightly deformation. It could be seen that although the pole canals have defects in the bionic structure, they could absorb the impact energy by its deformation.

Total deformations of bionic structures with and without poles: a, c, e without poles; b, d, f with poles
Parameter study
The structural deformation and energy absorption performance of bionic structure under axial impact are in close relation to the geometric parameters. Geometric changing has significant influence on energy absorption of the structure. Therefore, analyzing these and finding some relationship between these parameters and the energy absorption performance have great significance in guiding the design of this kind of bionic energy absorption structure. This work studies the velocity of the impact loading and diameter of the hollow column, and all simulation are considered with the pole canals.
The velocity of impact loading
The velocity of impactors is 0.1 m/s (Fig. 6a, d), 1 m/s (Fig. 6b, e) and 10 m/s (Fig. 6c, f), respectively. The materials of bionic structure are polyethylene. When the velocity of impactor is 0.1 m/s, the total deformation is 8.21 μm, as shown in Fig. 6a, d. When the velocity of impactor increases to 1 m/s, the total deformation becomes 40.09 μm. While the velocity has been increased by about 10 times, the total deformation has raised by about five times. When the velocity is 10 m/s, the total deformation is 67.92 μm. While the velocity has been increased by about 100 times, the total deformation has just raised by about eight times. When the velocity is 0.1 m/s, the deformation of the bionic structure is not obvious. The poles and hollow columns have a slightly distortion. For the 1 m/s velocity, the diameter expansion of the bottom side of the pole is about two times higher than that of initial diameter. It could be seen clearly that the top side of the hollow column has an expansion which makes the diameter to about 10 μm. When the velocity is 10 m/s, the poles in the center of the bionic structure have a distinct deformation. The deformed diameter of the bottom side of the pole is about five times higher than that of initial diameter. Unlike other columns which have a slight distortion, the hollow column in the center of the bionic structure exists obviously S-type deformation.

Total deformations of bionic structures in the different impact velocity of the impactors: a, d velocity = 0.1 m/s; b, e velocity = 1 m/s; c, f velocity = 10 m/s
The diameter of the hollow columns
The inside diameters of the hollow columns are 8 μm (Fig. 7a, d), 24 μm (Fig. 7b, e), and 40 μm (Fig. 7c, f), respectively. The materials of bionic structure are polyethylene and the velocity is 10 m/s. When the inside diameter is 8 μm, the pole in the center has a slight distortion as same as the poles in other places. When the inside diameter is 24 μm, the left side of the hollow column in the center of structure shows S-type change. The right side shows no obvious bending. The poles in other part appear distorted, and the side which is near the center of the structure deforms higher than that on the side, as shown in Fig. 7e. When the inside diameter of hollow column is 40 μm, the pole in the center of structure has a greater deformation than that in above cases. The size of expansion is about 15 times higher than that of initial diameter. The deformation pattern of central hollow column is symmetrical. The poles in other places appear obviously distorted which is bigger on the side near the center and smaller on the side near the structure edge, as shown in Fig. 7f.

Total deformations of bionic structures in the different inside diameter of the hollow columns: a, d inside diameter = 8 μm; b, e inside diameter = 24 μm; c, f inside diameter = 40 μm
The thickness of cuticle
As a part of beetle elytra, cuticle plays an important role in the area of protection. The thickness of ladybird elytra could be attained about 50–60 μm, while the thickness of cuticle could be half of total thickness of elytra. To investigate how the elytra cuticle absorb energy to protect the beetle body and hind-wing, two kinds of bionic structures with different cuticle thickness have been compared by numerical simulation. The cuticle thicknesses of bionic structures have been set as 1 and 30 μm, respectively. The total deformation of bionic structure with 1 μm cuticle thickness is shown in Fig. 8a, b, and the distribution of equivalent stress is shown in Fig. 8c. Due to the cuticle of structure is very thin, the impactor slipped on the cuticle obviously after striking with the bionic structure. The total deformation of bionic structure with 30 μm cuticle thickness is shown in Fig. 8d, e. The deformation is not obvious on the hollow columns which located on the both remote sides of the thinner cuticle structure. The column which deformed apparently is just located in the center, as shown in Fig. 8b. The deformation is obvious on the hollow columns which located on the both remote sides of the thicker one, as shown in Fig. 8e. Thus it could be seen that three columns absorbed energy together. The maximum equivalent stress of the bionic structure with 1 μm thickness cuticle is located on the upper side of center column, as shown in Fig. 8c. While the maximum equivalent stress of the bionic structure with 30 μm thickness cuticle is located in the bottom side of the pole canal in the cuticle, as shown in Fig. 8f. Therefore, the cuticle and pole canal have significantly affected on energy absorbing, and they shared the load to adjacent hollow columns, effectively reduced the pressure of deformation on the single column.

Total deformations of bionic structures with different thickness of cuticle: a, b, c cuticle thickness = 1 μm; d, e, f cuticle thickness = 30 μm
Conclusions
Beetle’s elytra could absorb energy from external loading to protect its wings and body. In this study, we proposed a new energy-absorbing bionic structure with pole canals in the elytra cuticle and hollow columns in the middle layer. The role of pole canal in the elytra cuticle has been investigated from a numerical standpoint under axial impact loading using finite element software. By comparing the structure with and without pole canal, we have found that the pole canal could absorb energy by deformation. Then the parameter studies have been carried out by numerical simulation, and the result shows that the velocity of impact loading, the diameter of the hollow column, and the thickness of cuticle have an important impact on the energy absorption characteristics. From a materials design perspective, the present work has shown that this bionic structure which is inspired from beetle elytra might be proposed as a useful energy-absorbing structure in the industrial field.
References
Naleway SE, Porter MM, McKittrick J, Meyers MA (2015) Structural design elements in biological materials: application to bioinspiration. Adv Mater 27:5455–5476
Naleway SE, Taylor JRA, Porter MM, Meyers MA, McKittrick J (2016) Structure and mechanical properties of selected protective systems in marine organisms. Mater Sci Eng, C 59:1143–1167
Xiang J, Du J, Li D, Liu K (2016) Aerodynamic performance of the locust wing in gliding mode at low Reynolds number. J Bionic Eng 13:249–260
Chen J, Xu M, Okabe Y, Guo Z, Yu X (2017) Structural characteristics of the core layer and biomimetic model of the ladybug forewing. Micron 101:156–161
Guo C, Li D, Lu Z, Zhu C, Dai Z (2014) Mechanical properties of a novel, lightweight structure inspired by beetle’s elytra. Chin Sci Bull 59:3341–3347
Guo C, Song W, Dai Z (2012) Structural design inspired by beetle elytra and its mechanical properties. Chin Sci Bull 57:941–947
Xiang J, Du J (2017) Energy absorption characteristics of bio-inspired honeycomb structure under axial impact loading. Mater Sci Eng, A 696:283–289
Chen J, Wu G (2013) Beetle forewings: epitome of the optimal design for lightweight composite materials. Carbohyd Polym 91:659–665
Xiang J, Du J, Li D, Zhen C (2016) Functional morphology and structural characteristics of wings of the ladybird beetle, Coccinella septempunctata (L.). Microsc Res Tech 79:550–556
Chen J, He C, Gu C, Liu J, Mi C, Guo S (2014) Compressive and flexural properties of biomimetic integrated honeycomb plates. Mater Des 64:214–220
Chen J, Xie J, Zhu H, Guan S, Wu G, Noori MN, Guo S (2012) Integrated honeycomb structure of a beetle forewing and its imitation. Mater Sci Eng, C 32:613–618
Chen J, Gu C, Guo S, Wan C, Wang X, Xie J, Hu X (2012) Integrated honeycomb technology motivated by the structure of beetle forewings. Mater Sci Eng, C 32:1813–1817
Chen J, Zhang X, Okabe Y, Saito K, Guo Z, Pan L (2017) The deformation mode and strengthening mechanism of compression in the beetle elytron plate. Mater Des 131:481–486
Zhang X, Xie J, Chen J, Okabe Y, Pan L, Xu M (2017) The beetle elytron plate: a lightweight, high-strength and buffering functional-structural bionic material. Sci Rep 7:4440
Dai Z, Yang Z (2010) Macro-/micro-structures of elytra, mechanical properties of the biomaterial and the coupling strength between elytra in beetles. J Bionic Eng 7:6–12
Dokukin ME, Guz NV, Sokolov I (2011) Towards nano-physiology of insects with atomic force microscopy. J Insect Physiol 57:260–264
Jalali SK, Heshmati M (2016) Buckling analysis of circular sandwich plates with tapered cores and functionally graded carbon nanotubes-reinforced composite face sheets. Thin Wall Struct 100:14–24
Boukharouba W, Bezazi A, Scarpa F (2014) Identification and prediction of cyclic fatigue behaviour in sandwich panels. Measurement 53:161–170
Tasdemirci A, Kara A, Turan K, Sahin S (2015) Dynamic crushing and energy absorption of sandwich structures with combined geometry shell cores. Thin Wall Struct 91:116–128
Bin H, Bo Y, Yu X, Chang-Qing C, Qian-Cheng Z, Tian Jian L (2015) Foam filling radically enhances transverse shear response of corrugated sandwich plates. Mater Des 77:132–141
Baroutaji A, Gilchrist MD, Smyth D, Olabi AG (2015) Analysis and optimization of sandwich tubes energy absorbers under lateral loading. Int J Impact Eng 82:74–88
Djamaluddin F, Abdullah S, Ariffin AK, Nopiah ZM (2015) Non-linear finite element analysis of bitubal circular tubes for progressive and bending collapses. Int J Mech Sci 99:228–236
Meguid SA, Yang F, Verberne P (2015) Progressive collapse of foam-filled conical frustum using kinematically admissible mechanism. Int J Impact Eng 82:25–35
Ehinger D, Krüger L, Martin U, Weigelt C, Aneziris CG (2015) Buckling and crush resistance of high-density TRIP-steel and TRIP-matrix composite honeycombs to out-of-plane compressive load. Int J Solids Struct 66:207–217
Neville RM, Scarpa F, Pirrera A (2016) Shape morphing Kirigami mechanical metamaterials. Sci Rep 6:31067
Zhang D, Scarpa F, Ma Y, Boba K, Hong J, Lu H (2013) Compression mechanics of nickel-based superalloy metal rubber. Mater Sci Eng, A 580:305–312
Zhang X, Chen J, Okaba Y, Xie J, Zhang Z (2017) Compression properties of metal beetle elytron plates and the elementary unit of the trabecular-honeycomb core structure. J Sandw Struct Mater. https://doi.org/10.1177/1099636217722823
Zhang X, Chen J, Okaba Y, Zhang P, Xiong X, Yu X (2017) Influence of honeycomb dimensions and forming methods on the compressive properties of beetle elytron plates. J Sandw Struct Mater. https://doi.org/10.1177/1099636217731993
Tuo W, Wei P, Chen J, Okabe Y, Zhang X, Xu M (2017) Experimental study of the edgewise compressive mechanical properties of biomimetic fully integrated honeycomb plates. J Sandw Struct Mater. https://doi.org/10.1177/1099636217722334
Acknowledgements
The authors gratefully acknowledge the financial support from China Scholarship Council.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Rights and permissions
About this article

Cite this article
Hao, P., Du, J. Mechanical properties of bio-mimetic energy-absorbing materials under impact loading. J Mater Sci 53, 3189–3197 (2018). https://doi.org/10.1007/s10853-017-1798-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10853-017-1798-7