
Abstract
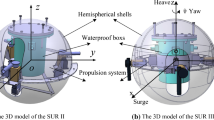
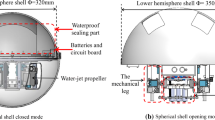
This paper describes the structural design of the SUR-II spherical underwater robot. A spherical shape was adopted due to its outstanding shock resistance and flexibility. We designed and developed vectored water-jet thrusters to implement 4-degrees-of-freedom (4-DOF) underwater motion while saving energy. Because each thruster provided 2-DOF motion, three were sufficient for 4-DOF motion. Therefore, the propulsion system was composed of three vectored water-jet thrusters mounted on an equilateral triangular support. A master–slave structure was employed for the electrical design to realize data collection and motion control. The master side was used for the sensor data collection and control algorithm, and the slave side was used to control the propulsion system. After examining the performance of a first-generation electrical system, we chose a more powerful master processor to allow for a more complicated control algorithm. A microelectromechanical system (MEMS) inertial measurement unit replaced the original gyroscope to collect the attitude angle for the three axes. A Kalman filter was used to calibrate the data output and reduce the noise of the MEMS sensor. A series of underwater motion experiments were carried out to test the performance of the spherical underwater robot; these included surge motion, yaw motion, depth control, and multiple-depth control tests. A proportional–derivative (PD) controller was used to control the direction of the vectored water-jet thrusters for underwater motion. The experimental results demonstrated that the spherical underwater robot could realize underwater motion by controlling the direction of the thrusters. However, the robot was not very stable because the change in the propulsive force was nonlinear.
Article PDF
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
References
Wang, S.X., Sun, X.J., Wang, Y.H.: Dynamic modeling and motion simulation for a winged hybrid-driven underwater glider. China Ocean Eng. 25(1), 97–112 (2011)
McPhail, S.: Autosub6000: A Deep Diving Long Range AUV. J. Bionic Eng. 6, 55–62 (2009)
Steenson, L.V., Phillips, A.B., Furlong, M., Rogers, E., Turnock, S.: The performance of vertical tunnel thrusters on an autonomous underwater vehicle operating near the free surface in waves. Second International Symposium on Marine Propulsors (2011)
Avila, J.P., Donha, D.C., Adamowski, J.C.: Experimental model identification of open-frame underwater vehicles. Ocean Eng. 60, 81–94 (2013)
Pan, Q., Guo, S., Okada, T.: A novel hybrid wireless microrobot. Int. J. Mechatron. Autom. 1(1), 60–69 (2011)
Philips, A.B., Steenson, L.V., Rogers, E., Turnock, S.R., Harris, C.A., Furlong, M.: Delphin2: an over actuated autonomous underwater vehicle for manoeuvring research. Trans. Royal Inst. Naval Architects, Part A - Int. J. Marit. Eng. 155(A4), 171–180 (2009)
Curtis, T.L., Perrault, D., Williams, C., Bose, N.: C-SCOUT: a general-purpose AUV for systems research. in Underwater Technology, 2000. UT 00. Proceedings of the 2000 International Symposium on, pp 73–77 (2000)
http://www.auvac.org/community-information/community-news/view/2462
Sanz, P.J., Prats, M., Ridao, P., Ribas, D., Oliver, G., Orti, A.: Recent progress in the RAUVI Project. A Reconfigurable Autonomous Underwater Vehicle for Intervention, 52 th International Symposium ELMAR-2010, vol. 471–474, Zadar, Croatia (2010)
Packard, G.E., Stokey, R., Christenson, R., Jaffre, F., Purcell, M., Littlefield, R.: Hull inspection and confined area search capabilities of REMUS autonomous underwater vehicle. in OCEANS (2010)
Allen, B., Stokey, R., Austin, T., Forrester, N., Goldsborough, R., Purcell, M., Von Alt, C., vol. 2, pp 994–1000 (1997)
Choi, H.T., Hanai, A., Choi, S.K., Yuh, J.: Development of an underwater robot, ODIN-III In: Proceedings of the 2003 IEEE International Conference on Intelligent Robots and Systems, pp 836–841 (2003)
Choi, S.K., Yuh, J.: Application of non-regressor-based adaptive control to underwater robots: experiment. Comput. Electr. Eng. 26, 187–194 (2000)
Watson, S.A., Crutchley, D., Green, P.N.: The mechatronic design of a micro-autonomous underwater vehicle (μAUV). Int. J. Mechatron. Autom. 2(3), 157–168 (2012)
Watson, S.A., Crutchley, D., Green, P.N.: The Design and Technical Challenges of a Micro-Autonomous Underwater Vehicle (μAUV). In: Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation, pp 567–572 (2011)
Watson, S.A., Green, P.N.: Propulsion systems for micro-Autonomous Underwater Vehicles (μAUVs) In: Proceedings of the 2010 IEEE International Conference on Robotics Automation and Mechatronics, pp 435–440 (2010)
Watson, S.A., Crutchley, D., Green, P.N.: A De-Coupled Vertical Controller for Micro-Autonomous Underwater Vehicles (μAUVs) In: Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation, pp 561–566 (2011)
Steenson, L.V., Phillips, A.B., Furlong, M.E., Rogers, E., Turnock, S.R.: The performance of vertical tunnel thrusters on an autonomous underwater vehicle operating near the free surface in waves. In procedue of Second International Symposium on Marine Propulsors. Hamburg University of Technology, Hamburg, DE (2011)
Palmer, A., Hearn, G.E., Stevenson, P.: Experimental testing of an autonomous underwater vehicle with tunnel thrusters. In: SMP’09 - First International Symposium on Marine Propulsors, Vol. 6, Trondheim, Norway (2009)
Saunders, A., Nahon, M.: The effect of forward vehicle velocity on through-body AUV tunnel thruster performance. In: OCEANS ’02 MTS/IEEE (2002)
Guo, S., Du, J., Ye, X., Yan, R., Gao, H.: The computational design of a water jet propulsion spherical underwater vehicle In: Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation, pp 2375–2379 (2011)
Guo, S., Du, J., Ye, X., Gao, H., Gu, Y.: Realtime adjusting control algorithm for the spherical underwater robot. Inf.-An Int. Interdisc. J. 13(6), 2021–2029 (2010)
Lan, X., Sun, H., Jia, Q.: Principle and dynamic analysis of a new-type spherical underwater vehicle. J. Beijing Univ. Posts Telecommun. 33(3), 20–23 (2010). Chinese
Yue, C., Guo, S., Shi, L., Du, J.: Characteristics evaluation of the vertical motion of a spherical underwater robot In: Proceedings of 2012 IEEE International Conference on Robotics and Biomimetics, pp 759–764 (2012)
Yue, C., Guo, S., Lin, X., Du, J.: Analysis and Improvement of the Water-jet Propulsion System of a Spherical Underwater Robot. In: Proceedings of 2012 IEEE International Conference on Mechatronics and Automation, pp 2208–2213 (2012)
Yue, C., Guo, S., Li, M.: Electrical System Design of a Spherical Underwater Robot (SUR-II) Proceeding of 2013 IEEE International Conference on Information and Automation, pp 1212–1217 (2013)
Yue, C., Guo, S., Li, M.: ANSYS FLUENT-based Modeling and Hydrodynamic Analysis for a Spherical Underwater Robot In: Proceedings of 2013 IEEE International Conference on Mechatronics and Automation, pp 1577–1581 (2013)
Yue, C., Guo, S., Li, M.: Yaxin Li: Passive and Active Attitude Stabilization Method for the Spherical Underwater Robot (SUR-II) In: Proceedings of 2013 IEEE International Conference on Robotics and Biomimetics, pp 1019–1023 (2013)
Guo, S., Lin, X., Tanaka, K., Hata, S.: Development and control of a vectored water-jet-based spherical underwater vehicle In: Proceedings of the 201 IEEE International Conference on Information and Automation, pp 1341–1346 (2010)
Lin, X., Guo, S., Tanaka, K., Hata, S.: Underwater experiments of a water-jet-based spherical underwater robot In: Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation, pp 738–742 (2011)
Lin, X., Guo, S., Yue, C., Du, J.: 3D modelling of a vectored water jet-based multi-propeller propulsion system for a spherical underwater robot. Int. J. Adv. Robot. Syst. 10 (2013). doi:10.5772/51537
Yue, C., Guo, S., Shi, L.: Hydrodynamic Analysis of a Spherical Underwater Robot: SUR-II. Int. J. Adv. Robot. Syst. 10 (2013). doi:10.5772/56524
Houghton, E.L., Carpenter, P.W.: Aerodynamics for Engineering Students Fifth Edition, pp 8–15. Publishedby Butterworth-Heinemann (2003)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Yue, C., Guo, S., Li, M. et al. Mechatronic System and Experiments of a Spherical Underwater Robot: SUR-II. J Intell Robot Syst 80, 325–340 (2015). https://doi.org/10.1007/s10846-015-0177-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10846-015-0177-3