
Abstract
This work focuses on enhancing the sensitivity and reducing the wheatstone bridge non-linearity of the current designs of Micro-Electro-Mechanical systems pressure sensor. Conventionally there are four piezoresistors on the four edges of a square diaphragm. These four peizoreistors give rise to a change in resistance with input stress which is converted to voltage using a wheatstone bridge so that it can be measured. In this renewed proposed design, there are a total of eight sensors on the diaphragm; four dedicated to the compressive and tensile stress on the XX – plane and the other four for the YY – plane. Compressive and tensile forces have similar magnitude but act in opposite directions which isn’t considered in the conventional designs, leading to non-linearity. Thus the non-linearity due to the sign difference in compressive and tensile forces is accounted for by calculating them separately and doubling the sensitivity. Each of these eight sensors include two piezoresistors; one attached to the diaphragm and the other outside forming a hairpin structure. Instead of using the wheatstone bridge for measuring the voltage, we make use of operational amplifiers. Thus removing the wheatstone bridge non–linearity.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Pressure sensors are widely used in various applications and are a building block of any control system. They can be of various types involving different working principles like, capacitive, electromagnetic, piezoelectric, strain-gauge and optical [16].
Traditionally pressure sensors operated by converting the mechanical motion caused by the pressure of the surrounding into the motion of a dial which indicates the applied pressure. Examples of such pressure detecting devices are; manometers, bourdon tubes, diaphragms, and bellows. Capacitive pressure sensors typically have a thin diaphragm acting as the movable plate with respect to the second fixed plate of the parallel plate capacitor [8]. Some recently developed capacitor pressure sensors use two movable diaphragms as well for improved signal acquisition [19]. The applied pressure on the diaphragm causes change in the capacitance between the two plates of the parallel plate capacitor giving rise to a voltage difference [1]. The output may not be perfectly linear and can deflect upto a few hundred picofarads [7]. In electromechanical pressure sensors as discussed in this work, the pressure input is directly converted into an electrical signal which can be measured. Conversion into electrical signal simplifies the process with respect to processing and fabrication.
Peizoresistive sensors are currently the most popular choice amongst the others due to their small size, high sensitivity, low cost and ease of fabrication [12]. Thus, in this paper we concentrate on piezoresistive model fabricated as a Micro-Electro-Mechanical systems sensor. MEMS are highly miniaturized mechanical and electrical components fabricated using techniques of micro-fabrication [3]. Micro – fabrication is a technique in which micro sensors and micro elements are fabricated on a silicon substrate [2]. They have components of varied sizes, ranging from a few micrometers to millimeters. They can sense the micro changes in a control system.
A pressure sensor consists of a diaphragm which deflects when pressure is applied resulting in a change in the resistance of the piezoresistors [18]. This resistance change is detected using a wheatstone bridge which converts it into measurable voltage. Wheatstone bridge is an electrical circuit formed of a quadrature structure of resistors. The bridge has zero potential difference when the quadrature resistors are in balanced condition. Due to stress applied when the wheatstone bridge gets unbalanced a voltage difference is created corresponding to the unknown resistor hence the peizoresistance can be calculated.
Pressure sensors are used to measure the pressure exerted by the gas or liquid on a diaphragm made of stainless steel or silicon [5]. Silicon is the most popular material to be used as a circular diaphragm because of its excellent mechanical properties and reproducible elastic deformations [14]. Plotting the output voltage versus the pressure applied gives us the sensitivity of the particular sensor. A sensor or a transducer is a device that converts some physical quantity as input into proportional output, usually an electrical signal [4]. While doing so, it is expected that the sensor reproduces the exact behaviour in the output signal as that of the input parameter. For this to achieve, it is expected that the sensor should have a linear response within the specified range [15]. Continuous research is ongoing on how to make the existing sensors more sensitive and give an output which has the least non-linearity. With a higher sensitivity even the finest changes on the diaphragm can be detected.
In this work a novel design is suggested for piezoresistive MEMS pressure sensor. It measures the compressive and the tensile forces separately on XX and YY planes. It uses the hair-pin structure for the piezoresistive sensors [9]. With these changes we notice that there’s an improved performance and linearity in the system output.
2 Theory
Micro-Electro-Mechanical systems pressure sensors are highly sensitive and are used for sensing fluid (liquid and gas) pressure [6]. They have higher sensitivity when compared to metal strain mechanical gauges which give rise to pressure change due to deflection on the surface of the diaphragm. Piezoresistivity is commonly used when it comes to micro electro mechanical sensors. Silicon is the most preferred and commonly used diaphragm material. Preferably doped silicon exhibits characteristic piezoresistivity [10]. For pressure MEMS, Boron doped silicon diaphragm is most commonly used and it exhibits the highest linearity with respect to applied pressure and deflection [13, 17]. Traditionally SOI (Silicon-On-Insulator) diaphragms are used [11].
2.1 Conventional Design with Silicon Oxide Square Diaphragm with Four Piezo-Resistors
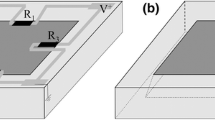
Conventionally four piezoresistive sensors are placed on the four edges of a square diaphragm as shown in Fig. 1. They measure the stress acting on the pressure sensor. These four piezoresistors are connected in form of a wheatstone in a calibrated balanced state (refer Fig. 2). As any stress is applied, the equivalent voltage is measured in the bridge circuit which corresponds to the piezoresistance generated due to stress. A traditional Silicon on cavity diaphragm structure is usually used. The cavity creates a pressure port which experiences longitudinal and transverse stresses. The stresses experienced in both longitudinal (YY) and transverse (XX) are equivalent to each other. In this conventional design the XX and the YY stresses are not measured separately hence lowering the sensitivity and linearity. Both these stresses even though they have equivalent magnitudes, they act in opposite directions.

Distribution of Piezoresistors in conventional pressure sensor

Circuit design of the Wheatstone bridge of conventional pressure sensor
Where V is the input voltage, R1, R2, R3, R4 are the four resistances on the four edges of the square diaphragm and Vr measures the equivalent measured voltage when stress is applied on the sensor and the bridge is unbalanced.
Using Experimental data we find R2 = 499.95Ω and R4 = 500.05Ω and let’s consider R1 and R3 as 0Ω giving the maximum deflection.
Thus we can see that the output bridge voltage measured under full deflection condition is half of the given constant input DC voltage. Thus reducing the sensitivity by half.
2.2 Probable Complications and Short Comings of the Conventional Design
The following sub-sections discuss the various problems with the conventional Micro-Electro-Mechanical systems sensor that cause non linearity and lesser sensitivity in the output of the sensor.
2.2.1 . Non Linearity Due to the Wheatstone Bridge Adopted by the Conventional Design
Static strain indicators are mainly based upon the wheatstone bridge circuits in the unbalanced condition. A wheatstone bridge is an electrical circuit with a quadrilateral resistor design and a bridge in the middle as shown in Fig. 3. When all the resistors are equal to each other the bridge is said to be balanced and the current flowing in the bridge is zero and there is zero potential difference. Here these resistors are piezoresistors which change their resistance with respect to the stress applied on them. As their values are different, the unbalanced voltage is measured which tells us how much stress is applied on the diaphragm. This results in a characteristic wheatstone bridge non-linearity. This non-linearity occurs when strain measurement is made with an unbalanced wheatstone bridge configuration. The errors due to nonlinearity when the strain is small and almost negligible but increases with the magnitude of the strain being measured. For example, 0.1% at 1000μ , 1% at 10,000μ
, 1% at 10,000μ and 10% at 100,000μ
and 10% at 100,000μ . Now the idea is to make sure all the resistors are adjusted so that the bridge is balanced. But due to minute unbalanced conditions the bridge non linearity arises.
. Now the idea is to make sure all the resistors are adjusted so that the bridge is balanced. But due to minute unbalanced conditions the bridge non linearity arises.

Wheatstone bridge design for a conventional pressure sensor with four active gages
This is the correction factor for the non-linearity when there are four active piezoresistors.
Where \( \left(\frac{E_0}{E}\right) \) is the wheatstone bridge output (mV/V); η is the nonlinearity; F is the force exerted and εis stress indicated by the sensor and εi is the actual strain under each active piezoresistor. These results are obtained by assuming a steady input voltage supply.
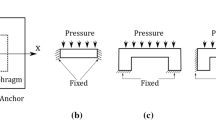
2.2.2 Tensile and Compressive Forces in XX Plane and YY Plane
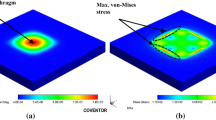
Conventionally there are four piezoresistors on four sides of a square diaphragm. Von Mises stress distribution in a square diaphragm is shown in Eq. 11 where VDD is the input voltage.
Therefore, resistance changes with input stress as:
where πL and πT are longitudinal and transverse piezoresistive coefficients. σL and σT are longitudinal ad transverse stress with respect to current flow. When pressure is applied on top R2, R3 and R1, R4 experience stress in the order of:
P = Applied Pressure; h = Diaphragm thickness; a = half diaphragm length; ν = Poisson’s Ratio R1 and R4 decrease in the order of:
R2 and R3 increase in the order of:
In a single crystal πL ≃ πT
But in practice R1 and R4 are in the high stress region and R2 and R3 decrease along the increasing distance from the center resulting in non-linearity. The output stresses in the XX plane and the YY plane are not equally dispersed which gives rise to a non-linearity. In the graph plotted as shown in Fig. 4, we can see that, the maximum stress is at the center of the diaphragm and it varies at an exponential rate as the distance from the center increases. To effectively calculate the stress across the entire diaphragm both in the XX and the YY direction (transverse and longitudinal respectively) we need to appropriately distribute the piezoresistors across the diaphragm. This will enable in doubling in the sensitivity too simultaneously while reducing the non – linearity.

Distribution of stress on XX plane as distance from the center of the diaphragm varies. Side length of the diaphragm = 400 μm
3 Revised Design of Pressure Sensor Using the Eight Piezo-Resistors with the Hair Pin Structure Using Op-Amps
A total of eight piezoresistors sensors in a square diaphragm of hairpin structure as shown in Fig. 5, with OP- Amps can be used which increase the sensitivity and decrease the non – linearity to a great extent. The circuit diagram of the hair-pin structure discussed with OP-Amps is shown in Fig. 6.

Hair pin structure for each piezo-resistor

Connections of the hair pin structure with the Op-Amp design with R – ΔR measuring piezo-resistor
Each of the eight piezoresistive sensors are made of the hairpin structure which have a standard non variable resistance R attached outside the diaphragm and a variable strain resistor R – ΔR and are connected with an OP – Amp in a configuration of an non – inverting amplifier. This solves the wheatstone bridge non linearity problem. Wheatstone bridge needs to be balanced with all resistors equal to each other before the beginning of the operation and are calibrated that way. But with use, they become unbalanced and give rise to a non-linearity which is best solved in this revised design by replacing the wheatstone bridge by an op-Amp hairpin structure. Thus the bridge non linearity is reduced and the sensitivity is increased two times of that of the conventional design output.
With a constant of −VDD which can be neglected by processing with connections shown in Fig. 7.

Processing the output of the hairpin piezo-resistor
Thus after processing we eliminate the constant DC component.
The output after using an inverter is;
Now as we have already seen that though the longitudinal compressive and transverse tensile forces have the same magnitude but they have opposite signs. But the wheatstone bridge doesn’t acknowledge to that, thus at high stress conditions the difference between the theoretical and the practical values differ by a large sum, hence causing the non – linearity. But using eight different piezoresistors on a single square diaphragm, the compressive and the tensile forces on both the XX and the YY plane are calculated separately as shown in Fig. 8.

Orientation of the eight piezoresistors on a square diaphragm pressure sensor of side width of 400 μm
Rx1 and Rx3 measures the Tensile stress in YY plane. Rx2 and Rx4 measures the Compressive stress in XX plane. Ry1 and Ry3 measures the Tensile stress in XX plane. Ry2 and Ry4 measures the Compressive stress in YY plane. The tensile forces are then inverted and integrated along with the compressive forces giving us an increase in the sensitivity upto eight times of that of the input voltage and sixteen times of the conventional design output.
Rx2, Rx4, Ry1 and Ry3 measure the compressive forces and are integrated. Ry4, Rx1, Ry2, Rx3 measure the Tensile forces which are inverted and then integrated along with the Compressive forces as shown in Fig. 9. Vx2 measures the voltage across the resistor Rx2 and so on. Equation 22 gives us the total sum of all stress experienced on XX and YY plane as the output.

Connection diagram of the eight piezo-resistive sensors which are distributed on the square diaphragm to measure the compressive and the tensile forces so that they can be processed accordingly
Let the voltage generated by each peizoresistor be V.
Thus we see that when compared to the conventional four piezoresistive sensors wheatstone bridge design the revised sensor gives a sixteen times higher sensitivity as shown in Fig. 12.
4 Effect of Thickness of the Diaphragm on the Deflection Sensitivity of the Sensor
The main factors on which the sensitivity and the non-linearity of the pressure sensor depends on are; diaphragm thickness, diaphragm size, placement, size shape of piezoresistors etc. Properly optimizing them will give us the best result with respect to our selected application.
Thinner diaphragms have a greater slope when deflection voltage is plotted against the pressure applied and hence give a higher sensitivity. But they are harder to fabricate. Thin diaphragm with an increase in size leads to non-linearity.
As there is an increase in the doping concentration, an decrease in the ionization factor is observed. So, if the sensor is likely to operate in low temperature environment it is advised to increase the doping concentration so that enough conductivity is achieved to get a significant output. With an increase in the doping depth in the diaphragm, there is a decrease in the sensitivity.
The cost of fabrication of the sensor is dependent on all these criteria and we must check the yield and the efficiency to see whether its cost efficient. Fabrication of a thin diaphragm is a costly process. By designing a sensitive sensor, diaphragms can be cost efficiently manufactured at ease.
Deflection with stress is taken for the following diaphragm thicknesses, T7 = 7 μm; T5 = 5 μm as shown in the graph plotted in Fig. 11. With an increase in thickness of the diaphragm of the sensor, the sensitivity decreases, the ease of fabrication decreases and the non – linearity increases.
With this revised design the sensitivity achieved by a thicker diaphragm is as high as eight times of that of a conventional thinner diaphragm sensor. Thus we get a higher sensitivity factor with a very low non-linearity due to thickness of a diaphragm and also ensure ease of fabrication along with it. The decrease in non-linearity in this novel design when compared to the conventional design is shown in the graph plotted in Figs. 10 and 11.

Non-linearity of the revised design when compared to the conventional design of the MEMS piezo-resistive sensor

The output voltage for different diaphragm thickness plotted. T7 = 7 μm; T5 = 5 μm
Figure 12 shows the different voltages plotted with T7, T5 both with the conventional and the revised novel design.

Deflection ratio (sensitivity) of the revised new novel sensor when compared to the conventional sensor design
5 Effect of Temperature on op-Amps when Compared to the Wheatstone Bridge Rendition
There are various very high temperature applications of pressure sensors like, combustion control, blast furnace monitoring, aircraft gas turbine monitoring, chemical monitoring, automotive industry etc.
Piezoresistive pressure sensors output depend of temperature changes in the environment. This deflection from ideal output due to temperature changes is called temperature drift. It depends on multiple factors like temperature coefficient of piezoresistance (TCπ), temperature coefficient of resistance (TCR), and junction leakage at high temperature. SOI (Silicon-on-Insulator) diaphragms suffer through leakage current at high temperatures since they are formed by isolation from the substrate by a p-n junction.
Effectively Polysilicon diaphragms can be used which are isolated by a thin film of Silicon dioxide. This prevents the leakage current and reduces temperature drift.
Op – Amps being semiconductor devices are subject to slight changes in behavior due to temperature changes in which it is operating. The variation in behavior due to changes in temperature is termed as “Drift”. It can be minimized the best by controlling the environmental temperature.
6 Result and Discussion
Conventional layout consists of four piezoresistors on the four edges of the silicon diaphragm which are then connected to a wheatstone bridge to detect the unbalanced bridge voltage which is nothing but the voltage arising due to pressure strain on the diaphragm. Even at the maximum deflection state, the bridge voltage is only half that of the input constant DC voltage. This leads to a very low slope when the voltage is plotted against the pressure applied and hence a very low sensitivity ratio. Also, usage of wheatstone bridge gives rise to bridge non-linearity which arises due to repeated unbalanced conditions. Additionally usage of four piezoresistors leads to unequal distribution of stress amongst the piezoresistors. This leads to non-linearity and lesser sensitivity. Conventionally longitudinal and transversal forces are calculated together but they act in opposite directions. At higher stresses, this leads to massive non-linearity.
Eight piezoresistors are distributed on the square diaphragm so that the tensile and the compressive forces can be measured separately and they can be processed to remove all non-linearity. Each piezoresistor is a hair-pin structure made of op-amps. They give a very linear output. The output voltages of each of these are integrated to give us a total Vout eight times the input voltage. This increases the sensitivity by a large extent.
Thinner diaphragms give greater sensitivity but are difficult to fabricate. Since we are getting a gain of sixteen times with respect to the four piezoresistor wheatstone bridge conventional design, we can easily fabricate the sensor with a thicker diaphragm and still get the required sensitivity.
Usage of the Polysilicon diaphragm makes sure that the leakage current is down to a minimum and we have the least non-linearity due to temperature changes, in other words, temperature drift. They have almost negligible temperature driven leakage current when compared to the traditional SOI (Silicon on Insulator) (Silicon dioxide) diaphragms.
Thus, we achieve multiple outcomes via this revised novel design of the sensor. The difference in sign for the compressive and the tensile forces are accounted for and the non – linearity due to that is removed. The bridge non – linearity due to wheatstone design is removed by using the hair-pin op – amp structure. The fabrication of the diaphragm is made easier as high enough sensitivity is obtained by using a thicker diaphragm itself. Sensitivity is increased sixteen folds each variable resistor is integrated with respect to the plane.
Op-Amps offer better linearity in the circuit but they have a few practical limitations. The output impedance is not zero and the sensor needs to be calibrated accordingly. The voltage gain might undergo phase shift. Op-Amps have some temperature dependency as well.
7 Conclusion
Eight piezoresistors are distributed on the square diaphragm so that the tensile and the compressive forces are measured equally. Usage of eight piezoresistors compared to the conventional four piezoresistors design reduces the non-linearity due to the difference in tensile and compressive forces. Each piezoresistor has a hair-pin structure with Op-Amps to measure the (R – ΔR). Op-Amps give a more linear output compared to wheatstone bridges. The output voltages of each eight piezoresistors is processed using an integrator Op-Amp and the resultant output voltage versus input pressure slope is much higher giving us a high sensitivity quotient. Additionally the usage of polysilicon diaphragm is suggested which offers negligible leakage current and temperature drift. Conventionally to achieve higher linearity and sensitivity, sensors with thinner diaphragms had to be fabricated making it challenging. With this improved design fabrication can be easier and cheaper.
References
Bakhoum EG, Cheng MHM (2010) Capacitive pressure sensor with very large dynamic range. IEEE Trans Compon Packag Technol 33(1):79–83
Bao M (2005) Analysis and design principles of MEMS devices. Elsevier, Amsterdam
Bao M Analysis and design principles of MEMS devices
Bao M, Yu L, Wang Y (1991) Stress concentration structure with front beam for pressure sensor. Sensors Actuators A Phys 28(2):105–112
Beeby SP, Stuttle M, White NM (2000) Design and fabrication of low cost microengineered silicon pressure sensor with linearized output. Proc IEEE Sci Meas Technol 147(3):127–130
Bustillo JM, Howe RT, Muller RS (1998) Surface micromachining for microelectro mechanical systems. Proc IEEE 86(8)
Daigle M, Corcus J, We K (2007) An analytical solution to circular touch mode capacitor. IEEE Sensors J 7(4):502–505
Han J, Shannon MA (2009) Smooth contact capacitive pressures sensors in touch and peeling mode operation. IEEE Sensors J 9(3):199–206
Hayati M, Fathipour M, Vaziri HM (2018) Design and analysis of hairpin piezoresistive pressure sensor with improved linearity using square and circular diaphragms. Micro & Nano Letters 13(7):1046–1051
Kumar SS, Pant BD (2014) Polysilicon thin film piezoresistive pressure microsensor: design, fabrication and characterization, vol 21. Springer-Verlag, Berlin Heidelberg, pp 1949–1958
Kumar SS, Pant BD (2014) Design principles and considerations for the ‘ideal’ silicon piezoresistive pressure sensor: a focused review, vol 20. Springer-Verlag, Berlin Heidelberg, pp 1213–1247
Kumar SS, Pant BD (2015) Effect of piezoresistor configuration on output characteristics of piezoresistive pressure sensor: an experimental study. Springer-Verlag, Berlin Heidelberg
Nallathambi A, Shanmuganantham T (2015) Performance analysis of slotted square diaphragm for mems pressure sensor. Journal on Microelectronics 1(2):62–67
Nguyen D, Pillatsch P, Zhu Y, Paprotny I, Wright PK, White RD (2015) MEMS-based capacitive pressure sensors with pre-stressed sensing diaphragms. IEEE
Rajavelu M, Sivakumar D, Rathnam JD, Sumangala K (2013) Enhanced sensitivity with extended linearity in MEMS piezoresistive pressure sensor. Micro & Nano Letters 8(10):753–756
Ripka P, Tipek A (eds) (2013) Modern sensors handbook. Wiley, New York
Suja KJ, Kumar GS, Nisanth A, Komaragiri R (2014) Dimension and doping concentration based noise and performance optimization of a piezoresistive MEMS pressure sensor. Springer-Verlag, Berlin Heidelberg
Tufte ON, Chapman PW, Long D (1962) Silicon diffused-element piezoresistive diaphragms. J Appl Phys 33(11):3322–3327
Xu G, Guangwen C, Guoquing H (2001) A surface micro machined double sided touch mode capacitive pressure sensor. Society of Photographic Instrumentation Engineers 4601:25–30
Author information
Authors and Affiliations
Corresponding author
Additional information
Responsible Editor: B. C. Kim
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Jindal, S.K., De, R., Kumar, A. et al. Novel MEMS Piezoresistive Sensor with Hair-Pin Structure to Enhance Tensile and Compressive Sensitivity and Correct Non-Linearity. J Electron Test 36, 509–517 (2020). https://doi.org/10.1007/s10836-020-05895-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10836-020-05895-0