
Abstract
Several natural hazards, including earthquakes, may trigger disasters and the presence of disaster drivers further lead to the massive loss of life and property, every year around the world. The earthquakes are unavoidable, as exact earthquake prediction in terms of date, and time is difficult. However, with the advancement in technology, earthquake early warning (EEW) has emerged as a life-saving guard in many earthquake-prone countries. Unlike other warning systems (where hours of warning are possible), only a few seconds of warning is possible in the EEW system, but this warning may be very helpful in saving human lives by taking the proper action. The concept of EEW relies on using the initial few seconds of information from nearby instruments, performing basic calculations, and issuing the warning to the farther areas. A dense network or enough network coverage is the backbone of an EEW system. Because of insufficient station coverage, the estimated earthquake location is error-prone, which in turn may cause problems for EEW in terms of estimating strong shaking for the affected areas. Seismic instrumentation for EEW has improved significantly in the last few years considering the station coverage, data quality, and related applications. Many countries including the USA, Mexico, Japan, Taiwan, and South Korea have developed EEW systems and are issuing a warning to the public and authorities. Several other countries, namely China, Turkey, Italy, and India are in process of developing and testing the EEW system. This article discusses the challenges and future EEW systems developed around the world along with different parameters used for EEW.
Article Highlights
-
This article aims to provide a comprehensive review related to the development
-
The explicit emphasis is on the scientific development of EEW parameters
-
The challenges and future scopes for the effective implementation of EEWS are discussed in terms of the correct location, the magnitude estimation, the region-specific use of ground motion prediction equations, communication technologies, and general public awareness
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Earthquakes are one of the natural hazards that cause the triggering of disasters. The physical and social vulnerabilities to strong earthquakes are the drivers of these disasters that lead to an expected rate of fatalities every year (Ismail-Zadeh 2021). Additionally, the fast growth in population and upcoming industries in earthquake-prone areas may increase the earthquake risks. Currently, there is no trustworthy method for the accurate prediction of earthquakes due to the highly complicated nature of the earthquake process. Keeping this in view, the development of precise earthquake early warning systems (EEWS) in this era of the digital revolution has become a paramount demand and task of instrumentation geophysicists for the safety of society. These EEW systems are gradually becoming the significant and effective tool for risk mitigation of a region (United Nations 2006). The two basic ideas behind the working of the EEW system are: seismic waves travel slower than information, and S-waves carry a significant portion of the earthquake energy and arrive later than low amplitude P-waves (Fig. 1). An EEW system perceives the ground shaking soon after the earthquake happens and raises alarms to the target areas within the range of seconds to a minute before the strong ground motion arrives there. Although the warning time is short still it can minimize the earthquake impact on different areas of society (Strauss and Allen 2016). For instance, the “drop, cover and hold on” strategy, vacating unsafe buildings, shifting to a safer location inside a structure, automatic shutting down of nuclear plants, gas pipelines, and slowing down of a running train, etc., can reduce earthquake risks. Hence, this advanced information can play a significant role to reduce the losses of lives and property in vulnerable areas and further aiding emergency response and recovery (Wu et al. 2002).

The process of earthquake initiation and recording of seismic waves at different times. This data is processed at a data center and the warning is issued in case of an impending catastrophic event (https://www.shakealert.org/)
J.D. Cooper introduced the concept of an earthquake early warning more than one hundred years ago in 1868 (Cooper 1868). The constant efforts from different research groups led to the employment of two EEW systems, namely regional EEW system (REEWS, network-based) and on-site EEW system (OEEWS, single instrument or network-based) in several countries. A REEWS consists of several instruments around the source region (Fig. 2), where the data from each instrument is sent to the central station for processing (Allen and Kanamori 2003; Kanamori 2005; Wu et al. 2016, 2019). The data from each instrument is used to calculate the earthquake size and location. Once the size and location are known, the ground motion at farther distances is estimated using ground motion prediction equations. On the other hand, OEEWS using data from a single sensor in the proximity of the target is helpful to issue an alert. The OEEWS responds more quickly than REEWS and can provide early warning to sites located in proximity to the source. The OEEWS is functional in many countries, for example, Mexico City (Espinosa-Aranda et al. 1995) Bucharest, Romania (Böse et al. 2007) Istanbul (Alcik et al. 2009), and Taiwan (Hsu et al. 2018). The on-site method is very rapid; however, the accuracy of the estimation of earthquake parameters is moderate as it is a single sensor-based system. Further, researchers are testing a hybrid approach with REEWS and OEEWS to improve the reliability of EEWS. This hybrid approach has been tested off-line for the 2009 L’Aquila earthquake (Mw 6.3) and ten large Japanese earthquakes; however, the performance of this approach is still under development and testing in southern Italy (Zollo et al. 2014).

A figure showing the functioning of regional and on-site earthquake early warning systems
Along with the rapid estimation of earthquake size, reliable computation of lead time (time before the high amplitude S-wave reaches the target site) is the other important requirement of EEWS. Typically, 3 s data is considered after P-wave arrival, so the ground motion estimation involving parameters estimation, followed by the issuing of warning in near-source regions may take around 8–10 s. As the whole process takes 10 s to issue the warning, the S-wave may have reached some of the near-field places where no warning is possible. The zone where no warning is issued is termed a blind zone and may vary from 30 to 50 km depending upon the total time consumed to analyze the event and issue the warning (Wu and Mittal 2021). For the illustration purpose, the lead time issued to various cities from the earthquake occurring in the northern Indian Himalayas is shown in Fig. 3.

Lead time at various cities in northern India from an earthquake originating in the northern Himalayas (Mittal et al. 2019b)
Although EEWS has emerged as a significant tool for risk mitigation worldwide, the limited bandwidth and dynamic range of recording instruments is a major bottleneck of EEWS. These instruments get saturated while recording higher magnitude earthquakes and result in underestimation of early warning parameters. To solve this problem, real-time GPS networks are used nowadays to provide vital earthquake parameters information. The geodetic network uses a GPS receiver unlike the seismometer, which measures displacement directly without any truncation, hence, making it most appropriate for big earthquakes. The network trigger as soon as the strain crosses the predefined threshold values (Bock et al. 2000). Hence, constant upgradation efforts and integrated data approach lead to the effective operation of EEW systems at the global level now a days.
This article aims to provide a comprehensive review related to the development of EEWS in the global scenario with an explicit emphasis on the scientific development of earthquake early warning parameters. Finally, we also discuss the challenges and future scopes for the effective implementation of EEWS.
2 Scientific Development of Earthquake Early Warning Parameters
The basic step in EEW is to estimate the magnitude, intensity, or other amplitude or frequency-based parameters using the initial few seconds of processed data after the arrival of the P-wave. Based on the threshold exceedance of these parameters, further actions involving warnings are decided. The reliable estimation of these parameters eventually demands the removal of low frequency drifting from the recorded data using a high pass filter (Wang et al. 2020). In the frequency domain, we can obtain velocity, \(V(f)\) by simply dividing the acceleration, \(A\left(f\right)\) with frequency, f. Hence, for low frequencies (f ≈ 0), the velocity signal becomes unstable and limits the analysis as shown in Fig. 4. Therefore, it is highly imperative to reduce the influence of low frequency drifting before computing the warning system parameters using a high pass filter (Wu and Kanamori 2008; Wang et al. 2020). Furthermore, a rigorous study is required to determine a correct range of the cutoff frequency of high pass filters as it might depend on the geographical location. The detailed evolution of these parameters with major advantages and limitations is described as follow.

a Acceleration; b Velocity; c Displacement
2.1 Maximum Predominant Period (\({\tau }_{p}^{\mathrm{max}}\))
The predominant period is one of the first EEW system parameters, which considers the initial few seconds of P-wave data for calculation within a selected time window (typically 3 s). \({\tau }_{p}^{\mathrm{max}}\) is the maximum value of the predominant period (\({\tau }_{p})\) which is calculated recursively and continuously from the vertical component of the velocity sensor (Nakamura 1988, Satriano et al. 2011) as:
Herein, \(\alpha\) is a smoothing constant and varies from 0 to 1, subscript i indicates the recursive nature of the relation.\({a}\) and \({v}\) represent the recorded acceleration and velocity time-domain signals, respectively. \({a}_{s}\) and \({v}_{s}\) are the smoothed acceleration and velocity time-domain signals.
From Eqs. (2) and (3), velocity and acceleration signals are processed to remove the local spikes. \({\tau }_{p}\) is a continuous process and it starts with no event. So, the value of \({v}_{s0}\) and \({a}_{s0}\) are considered as zero at the beginning of the record. At each time step, \({\tau }_{p}\) is computed, and the maximum value, \({\tau }_{p}^{\mathrm{max}}\), within the time window is selected as the parameter used to estimate the magnitude of EEW. The time window has to be started at the 0.05 s rather than 0 s due to the recursive nature of the \({\tau }_{p}\) calculation (Olson and Allen 2005). The predominant periods calculated within 2–4 s from the onset of P-waves were found linearly related to the earthquake size (Nakamura 1988; Allen and Kanamori 2003) and the regression law was established between \({\tau }_{p}^{\mathrm{max}}\) and magnitude to determine magnitude of future earthquakes (Lockman and Allen 2005; Tsang et al. 2007; Wurman et al. 2007). On separating the magnitude in smaller and higher magnitude ranges, \({\tau }_{p}^{\mathrm{max}}\) showed a large scatter for lower magnitude (Allen and Kanamori 2003; Olson and Allen 2005; Tsang et al. 2007), providing the fact that it cannot estimate the size of smaller events.
2.2 Average Time Period (\({{\varvec{\tau}}}_{{\varvec{c}}}\))
The earthquake size depends upon the source rupturing process-whether it has stopped or keeps growing. Generally, the significant information about earthquake rupture is reflected in the time period of the earthquake. Thus another parameter called the average time period (\({\tau }_{c}\)) was formulated (Kanamori 2005) by studying this relationship and was found that P wave pulse rises with the earthquake size that can be used to estimate the magnitude. The mathematical expression of \(\tau_{c}\) is as follows,
where
In real-time operation, velocity \((v)\) and displacement (\(x)\) signals are high pass filtered (0.075 Hz), obtained by integrating the acceleration data (Kanamori 2005; Wu and Kanamori 2005a, 2008). The approach followed in \({\tau }_{c}\) and \({\tau }_{p}^{max}\) is same, except two basic differences. \({\tau }_{p}^{max}\) is recursive in nature and determined from the ratio of velocity and acceleration ground motion records, whereas \({\tau }_{c}\) is computed from the ratio of filtered velocity and displacement ground motion records (Shieh et al. 2008). Also, \({\tau }_{p}^{\mathrm{max}}\) governs the predominant period of the P-wave, while \({\tau }_{c}\) calculates the average period.
Wu and Kanamori (2005a, b) established a regression relation between \({\tau }_{c}\) and magnitude while working for the development of an on-site EEWS in Taiwan. In their analysis, they used 46 different earthquakes having magnitude ≤ 6 that were recorded within 100 km of epicentral distance. After that a lot of work has been done in this direction. In another work, Wu and Kanamori (2008) analyzed 54 earthquakes with magnitude range 4–8, collected from strong ground motion dataset of Taiwan, Japan, and Southern California. Although the log (\({\tau }_{c}\)) value increases linearly with magnitude; the value of \({\tau }_{c}\) shows a large scatter for lower magnitude earthquakes (Zollo et al. 2010; Nazeri et al. 2017; Wang et al. 2020). The low magnitude earthquakes with low signal-to-noise ratio records may mislead the \({\tau }_{c}\) calculation, leading to false alarms. Also, \({\tau }_{c}\) tends to saturate for magnitude above 7. So, for reliable magnitude estimation, computing the average of \({\tau }_{c}\) from different stations close to epicenter is recommended. Shieh et al. (2008) investigated the performance of \({\tau }_{c}\) and \({\tau }_{p}^{\mathrm{max}}\) and observed that averaging of event size estimated using τc and τpmax approach simultaneously further reduce the standard deviation in magnitude estimation. The performance of \({\tau }_{c}\) and \({\tau }_{p}^{\mathrm{max}}\) was tested with different poles filter and was found that \({\tau }_{c}\) performs better with 2 poles filter, whereas \({\tau }_{p}^{\mathrm{max}}\) provides accurate results with 5 poles filter (Shieh et al. 2008). Colombelli et al. (2012) recommended the better magnitude estimation by increasing the time window up to the S-wave arrival time, however, the warning time is compromised.
2.3 Peak Displacement Amplitude
In addition to frequency-based parameters discussed above, peak displacement amplitude (\({P}_{d}\)) is another amplitude-based EEW parameter, which is estimated from the onset of P-and S-waves arrivals (Wu and Zhao 2006; Zollo et al. 2006). The \({P}_{d}\) value is computed using the maximum amplitude from the filtered vertical component in selected time window. Wu and Zhao (2006) related the \({P}_{d}\) values with hypocentral distance, R and magnitude, M using the following relation:
where X, Y, and Z are regression coefficients, determined using regression analyses. Once the relationship is established, it can be used to estimate the event magnitude. Zollo et al. (2006) further studied the \({P}_{d}\) relation and normalized it to a common epicentral distance (10 km). They used only 1 s of P and S-waves to establish the relation between magnitude and \({P}_{d}\) and is expressed as:
Wu and Kanamori (2005a) established linear relations among different parameters involving \(P_{d}\) and peak ground velocity (PGV) and suggested that whenever \(P_{d} \ge \,0.5\,{\text{cm}}\) the earthquake is expected to be a higher magnitude earthquake. Consequently, Wu and Kanamori (2008) also proposed to predict the PGV by using the \({P}_{d}\), and developed a regression between PGV and \({P}_{d}\) using numerous earthquake events recorded in Taiwan, California, and Japan. Based on the \({P}_{d}\), numerous regression carried out using data available across the world, \({P}_{d}\) was considered one of the innovative parameters to estimate the earthquake magnitude precisely. By looking at the advantage of \({P}_{d}\) in magnitude estimation, it is considered as one of the key ingredients require to prepare shakemaps of earthquakes (Wu 2015; Wu et al. 2016, 2019; Chen et al. 2017; Legendre et al. 2017; Mittal et al. 2019a; Yang et al. 2021).
Figure 5 demonstrates the process of extracting \({P}_{d}\) and \({\tau }_{c}\) from the vertical component using the initial 3 s of the recordings. However, Brown et al. (2009) observed that \({P}_{d}\) values get saturated for higher magnitude earthquakes. In addition, the low-frequency noise dominates in the displacement of low magnitude earthquake, obtained by the double integration of the acceleration signal. As the calculated \({P}_{d}\) values depend on earthquake magnitude as well as distance, it is difficult to achieve a single relationship between the magnitude and amplitude. Therefore, they proposed that \({P}_{d}\) values are over-estimated due to low-frequency drift and lead to false alarms. Wu and Kanamori (2005b) proposed a hybrid algorithm based on the combination of \({\tau }_{c}\) and \({P}_{d}\) and stated that if \({P}_{d}\times {\tau }_{c}\)=1.0 is useful to detect the damaging earthquakes (Fig. 6). They also put forward multi-parameter approach based of \({\tau }_{c}\) and \({P}_{d}\). According to this approach if \({P}_{d}\) is more than 0.5 cm and \({\tau }_{c}\) is greater than 1 s, the earthquake is probably a higher magnitude one. The details about various criteria in their approach are given in Table 1. The combination of two or more parameter is recommended but for smaller magnitude earthquakes the possibility of false alarm increases, primarily due to low signal-to-noise ratio. For smaller earthquakes, Wang et al. (2020) applied a 0.25 to 3 Hz bandpass filter in the three-second P-wave window and found that magnitude estimation is more appropriate. They suggested that the appropriate filtering technique plays an important role in predicting the earthquake magnitude. Thus, a careful and thorough study is required to determine the correct bandwidth of the filter that might depend upon the geological conditions.

Vertical component acceleration, velocity, and displacement seismograms (Wu and Kanamori 2008)

Relationship between magnitude and \({P}_{d}\times {\tau }_{c}\) (Wu and Kanamori 2005b)
2.4 Cumulative Absolute Velocity (CAV) and Its Variants
Alcik et al. (2009) presented another class of EEW parameters, cumulative absolute velocity (CAV), based on integral measurements. CAV plays an important role to issue earthquake alerts by identifying the triggering aspects of earthquakes happening; however, it does not provide a good estimate of earthquake magnitude. Principally, the CAV method was invented to quantify the damage in structural engineering (Campbell and Bozorgnia 2008, 2012; Bradley 2015). Reed and Kassawara (1990) found that for CAV < 0.3 cm/s, ground motion is not strong. The CAV is generally assumed to be more sensitive toward higher magnitude earthquakes as it has low-frequency components. So, CAV considers the whole duration of the ground motion contrary to high-frequency components. Erdik et al. (2003) studied the applicability of CAV in EEW and reported its success in Istanbul EEW. Considering the complexity of the fault rupture process and short fault distance, they studied the threshold value of CAV using data from Turkey and the rest of the world. Moreover, logarithmic CAV was computed which seems to be in good agreement with magnitude (Böse et al. 2008). CAV is determined by the absolute integral of acceleration ground motion.
a(t) is the acceleration ground motion record and tmax is the time duration.
From Eq. (7), it can also be interpreted that CAV is the area under the curve within a specified time duration. Based on CAV, Istanbul EEW has three categories of warning systems. Firstly, a warning is issued when CAV exceeds the predefined threshold value at all three stations (Alcik et al. 2009). These parameters are also useful for issuing a warning based on some predefined threshold values.
To improve the efficiency of CAV, EPRI (1991) introduced a new parameter Bracketed Cumulative Absolute Velocity (BCAV). BCAV is calculated and summed if the value of absolute acceleration exceeds the predefined thresholds 0.245 m/s2 or 0.025 g at any time (\({t}_{i}\)) during each one-second interval (Alcik et al. 2009). Meanwhile, BCAV is calculated as:
where Δt = 1 s.
To eliminate the accumulated BCAV values caused by noise in structures and industrial facilities, BCAV needed some modifications. For this, a new parameter Windowed Bracketed Cumulative Average Velocity (BCAV-W) was introduced which is based on the calculation of a broader window length (W) instead of a single second window in BCAV (Alcik et al. 2009 and Satriano et al. 2011):
For the Marmara region, a minimum acceleration level of 3 mg is considered (Alcik et al. 2009). In BCAV-W, the minimum acceleration value is adjusted in broader window length (typically, 8 s) to enhance the system robustness, whereas, it is fixed in BCAV. The concept of BCAV-W is further modified for the ground motion records with less than 100 km and three-level alarms are implemented in the Istanbul EEW system. Although an optimum selection of window length and bracket time further need rigorous studies.
2.5 Root Sum of Squares Cumulative Velocity (RSSCV)
Root Sum of Squares Cumulative Velocity (RSSCV) is an EEW parameter that considers the cumulative effect of the ground motion. Similar to other methods, RSSCV values are calculated from the initial portion of the P-wave and relate well with the size of the earthquake in the near-field. The mathematical representation of RSSCV is as
where v is the velocity signal in the time domain. The RSSCV is also employed for automatic P-onset detection as well as magnitude estimation in an EEW system, which proves its usefulness as a multitasking parameter in the EEW algorithm.
A summary of the above-discussed EEW parameters is presented in Table 2.
By looking at the EEW parameters discussed above, it is evident that different thresholds of parameters are used for the issuance of the warning. Also, the threshold values may vary from region to region depending upon geological conditions. The alarms are divided into four different categories as seen in Fig. 7 (Kumar and Zhao 2018).
-
1.
True but no alarm: When the computed parameters are correct and less than the predefined threshold parameters, no warning is needed.
-
2.
Correct alarm: The computed EEW parameters are greater than the predefined threshold and a warning is issued.
-
3.
The false alarm: When the EEW parameters overestimate the magnitude and warning is issued.
-
4.
Missed alarm: When the parameters are underestimated and a warning is not issued. Although the magnitude was higher and a warning was needed.

\(\tau_{c}\) versus magnitude (Kumar and Zhao 2018)
In this study, we have estimated the two most frequently used EEW parameters \({\tau }_{c}\) and \({P}_{d}\) using a limited dataset (12 vertical components of accelerograms) recorded during three major earthquakes in the Japan region. Wang et al. (2020) suggested that near-field data are the quickest source for rapid assessment and EEW. Hence, only stations within an epicentral distance of ≤ 60 km are considered for this study. To ensure good event coverage, we have used only those events which are recorded minimum at three stations. The details of events and stations used for this analysis are described in Tables 3 and 4. Zollo et al. (2006) suggested applying a strong high pass filter for records with peak velocity (\({P}_{v}\)) < 0.05 increases the stability of \({\tau }_{c}\) values. Hence, in this work, we have used a low cut filter with a cutoff frequency of 0.15 Hz for the records having \({P}_{v}\) < 0.05 cm/s and 0.075 Hz for records with \({P}_{v}\) ≥ 0.05 cm/s. The selection criterion of filter is based on visual inspection of the low frequency displacement records (Boore and Bommer 2005). Further, parameters \({\tau }_{c}\) and \({P}_{d}\) are used to investigate the linear regression relationships with earthquake magnitude (M) using 7 s after P-wave arrival, as illustrated in Fig. 8.

Relation of \({\tau }_{c}\) and \({P}_{d}\) with magnitude using a limited dataset from Japan
3 Earthquake Early-Warning Systems in the Global Scenario
In the last two decades, the testing and implementation of the EEW system have progressed significantly around the world. Figure 9 shows the status of EEW throughout the world. A brief description of the few warning systems used by different countries is reported below.

Recent status of EEW around the world
Mexico In 1985, a great earthquake (Mw 8.1) triggered a disaster in Mexico City claiming around 10,000 lives and leaving parts of the city in ruins (Ohmachi et al. 1988). The seismic signal recorded by the instruments provided an opportunity for the scientists to study the amplification caused by the subsoil strata that induced resonance in various buildings, responsible for the collapse and toppling of the buildings. Besides, during that time neither any EEW system nor prior training for the rapid response was existing (Esteva 1988). After facing severe shaking and economic loss, the Mexican researchers and authorities collaborated with the international community to tackle this problem. Since then, the researchers worked to design some system to warn their public ahead of an impending earthquake and finally came up with an advanced seismic warning system called the Mexican seismic alert system (SAS), by placing the sensors near major fault lines along Mexico's Pacific coast. The SAS is a collaborative work of the civic association and the contribution of the government authority. The SAS is a regional warning system based on the front-detection concept (Iglesias et al. 2007) and is operating since August 1991. This system is capable of providing a 60 s warning time to Mexico City from the higher magnitude earthquakes happening in the Guerrero gap around 280 km away from Mexico City. The SAS is programmed to issue a general and restricted alert for earthquakes having magnitude > 6, and 5 < M < 6, respectively.
This system includes digital accelerometers which are placed along the coast of Guerrero, on the Pacific Ocean. The central processing unit receives the data from all the instruments and finds the location and magnitude of the earthquake event. From 1991 to 1993, the system was only tested by sending messages to a limited number of users. Since then the system has detected numerous events in the Guerrero gap, and the warning was issued for 158 events including nine deadly events (Suárez et al. 2018). The false and missed ratio of events in this system is almost negligible.
A public warning of 72 s was issued during the earthquake of 14 Sept. 1995 before the arrival of destructive waves. The use of SAS alert was enhanced in 2008 by installing a digital code relay system such as that used by National Oceanic and Atmospheric Administration (NOAA). In recent times, this system issued an early warning two minutes prior for Mexico City during September 7, 2017 earthquake (M 8.1) and around the 20 s during September 19, 2017 (M 7.1).
Taiwan Taiwan started working for the EEW system in 1986, learning lessons from the destruction in Taipei city, around 120 km away from the epicenter, caused by the Hualien earthquake of November 15, 1986 (\({M}_{w}\) 7.8). Although the earthquake was located offshore, the destruction was severe probably due to site amplification (Wu and Mittal 2021). Teng et al. (1997) postulated that if any seismic network installed in the Hualien area could assess the earthquake size and location using the onset of the waveforms, a warning of 10–20 s was possible for Taipei, the capital city of Taiwan. Working on the same guidelines, Wu and Teng (2002) adopted a virtual sub-network (VSN) method based on the regional EEW approach. The results revealed that VSN could shorten the average earthquake reporting time by 20 s after the detection of P-waves (Hsiao et al. 2009).
The official EEW system operated by Central Weather Bureau (CWB) comprises 119 digital telemetered strong-motion stations installed all over the Taiwan region (Yang et al. 2021; Wu et al. 2021). These stations transmit the real-time data continuously with a sampling frequency of 100 Hz to the central depository located in Taipei. The received data are processed continuously for accessing the shaking. Besides the data from 119 these stations, the central station is also flooded with real-time strong-motion data from 36 stations of the National Center for Research on Earthquake Engineering (NCREE) and 26 stations of BATS (Institute of Earth Sciences, Academia Sinica 1996). In recent times, CWB started issuing warning alerts to the public (Chen et al. 2015; Wu 2015; Wu et al. 2016, 2019) and so far, around 250 warnings have been issued to disaster prevention agencies, and general services involving railway and hospitals.
In addition to the official CWB system, two more EEW systems operated by National Taiwan University (NTU), and NCREE are functional. The NTU system has regional and on-site approaches amalgamated, whereas the NCREE system works mainly for on-site warning. The present NTU network consists of 749 low-cost Micro-Electro-Mechanical System (MEMS)-based P-Alert sensors (Holland 2003). Initially, NTU started the network by installing 15 instruments under a pilot project in the eastern part of Taiwan close to Hualien County (Wu and Lin 2014). Based on the performance of the network, the network was extended in other parts of Taiwan as well (Wu 2015; Wu et al. 2016, 2019). Currently, the P-Alert systems are installed closely (almost every 5 km) in most parts of Taiwan in two- or three-story buildings, where suitable power and internet connectivity are available. The data from the instruments is continuously transmitted to the central station at NTU and processing is done using Earthworm software (Johnson et al. 1995; Chen et al. 2015). The P-alert instruments use peak displacement, \({P}_{d}\) parameter to issue on-site warning system. For on-site EEW, the data are processed continuously in the field to determine the predefined thresholds (Wu and Kanamori 2005a). The P-Alert devices issue on-site warning as soon as the ground motion exceeded predefined thresholds (\({P}_{d}\) larger than 0.35 cm or PGA larger than 80 gals) as suggested by Wu et al. (2013, 2019). Further, a near real-time shakemap has also been generated using processed real-time signals (Hsieh et al. 2014; Legendre et al. 2017; Yang et al. 2018; Mittal et al. 2019a, 2021). In the P-alert central station, the system generates a shake map every time 12 stations perceive PGA higher than 1.2gals. These maps are sent via e-mail to specific users (including the National Science and Technology Center for Disaster Reduction, NCDR) after one to three minutes the system gets triggered. Also, Facebook is regularly updated with these shake maps after an event. The official page of P-Alert Shakemap on Facebook is at https://www.facebook.com/Palert.Shakemap/.
Japan Japanese National Railways in 1960 introduced the first warning system for protecting high-speed trains. Several sensors were installed along the railway track to sense the earthquake and its threshold value, and once the threshold is exceeded, the trains in motion, are slowed down manually. Nakamura (1988) did significant work to modify the warning system, and the first operative warning system came into existence in 1992 with the name of UrEDAS (Urgent Earthquake Detection and Alarm System). After the 1995 Kobe earthquake, the Japan Meteorological Agency (JMA) expanded the warning system to the metropolitan cities and coastal lines by installing a large number of sensors. The EEW system installed by JMA consists of more than 4000 instruments placed at an inter-spacing of 20 km (Tajima and Hayashida 2018). The system issues a general public warning for an event having a magnitude > 6.0 or when 100 or more gal is detected in the amplitude of P or S-wave. The EEW system of JMA was tested with a large-scale public training movement conducted between 2004 and 2006, afterward, it started working in 2007. Japan is one of the countries that installed a nationwide EEW system. Some other countries having successful EEW like Mexico have limited coverage of earthquake warning systems. The large-scale magnitude, Tohoku earthquake of 2011, highlighted both the advantages and the limitations of earthquake early warnings in Japan. The public received alerts 60 s before the main shock; however, the system underestimated the magnitude in the affected regions (Cyranoski 2011). The principal reason was the assumption of the point source, whereas the source ruptured finitely. However, JMA has improved the EEW functioning significantly by introducing the iterative proportional fitting (IPF) and propagation of local undamped motion (PLUM) methods (Kodera et al. 2018). The JMA warning system is considered effective as without it the fatalities would have been much higher (Fujinawa and Noda 2013). The principal elements behind the proper functioning of EEW in Japan are the education and awareness at the school and society level, knowing how to respond during an earthquake. The other factor assisting the functioning of EEW is a significant reduction of physical vulnerability as the buildings are well designed according to building codes.
Italy The severity of damage caused by a large earthquake (M6.9) of November 23, 1980, claiming almost 3000 lives in southern Italy, laid the foundation of EEW in Italy (Gizzi et al. 2020). Southern Apennines in Italy is a highly seismic active zone, capable of generating high magnitude earthquakes. Initially, a local seismic network called Irpinia was installed along the seismogenic fault for recording the earthquakes and issuing an early warning. At present time, PRESTo (PRobabilistic and Evolutionary early warning SysTem), a regional EEW system is functioning in Italy that incorporates advanced algorithms for picking real-time earthquake location and magnitude estimation into the existing system (Satriano et al. 2011). This EEW system, developed by the National Institute of Geophysics and Volcanology, University of Naples, and Amra society follows the probabilistic and evolutionary approach to provide information about the most probable hypocentral volume. This warning system sends text messages over the phone, as well as e-mails. Festa et al. (2018) discussed the performance of both regional and on-site EEW systems in terms of robustness during the 2016–2017 central Italy earthquake sequence (Mw 5.0–6.5). Some alerts were missed during the 2016 sequence earthquakes, which mainly correspond to sites located within the blind zone having a radius on average of 20 km (Festa et al. 2018). The regional EEW system is designed to get a warning from distant and larger earthquakes and the L’Aquila earthquake of 2009 occurred close to towns, which may not help the people, as the epicentral distance was very less.
Turkey The damage caused by two large magnitude earthquakes namely August 17, 1999 (\({M}_{w}\) 7.4) and November 12, 1999 (\({M}_{w}\) 7.2) raised foremost concern about the safety of human lives and economic loss in Turkey (Alcik et al. 2009). Furthermore, Istanbul is highly susceptible to a future great earthquake that may happen around Main Marmara Fault (Bohnhoff et al. 2013) and so to save human lives and property loss, an earthquake rapid response and an EEW system (IERREWS) were implemented in Istanbul in 2002 (Erdik et al. 2003). This system works with a dense strong-motion network of 100 stations installed in the Metropolitan area of Istanbul. Also, ten additional stations are placed close to the Great Marmara Fault for online data transmission and EEW. This warning system works on some threshold systems and the warning is issued when the threshold value is exceeded.
Romania The historical catalog of Romania is full of the larger crustal earthquakes occurring along the Shabla fault zone in Northern Bulgaria (Oncescu et al. 1999). Frequent occurrence of intermediate-depth earthquakes in Vrancea of the south-eastern (SE) Carpathian region cause the shaking in various European cities and is primarily responsible for destruction in the capital region, Bucharest of Romania (Ismail-Zadeh et al. 2012). The intermediate-depth earthquakes in the Vrancea region are focused in a small region having dimensions about 110 km (deep) × 70 km × 30 km (Ismail-Zadeh et al. 2007, 2012). To get the warning time ahead of the strong shaking, Romania initiated its EEWS for Bucharest in 1999 (Böse et al. 2007). The average distance of Bucharest is about 120 km from the seismogenic zone and the EEW system is capable of providing around 25 s warnings before the arrival of destructive waves (Ionescu et al. 2007). Now, this system provides a warning to Horia Hulubei National Institute of Physics and Nuclear Engineering, to put nuclear sources in a safer position (http://www.nipne.ro/).
USA Earthquakes æ living in areas of seismic risk, especially on the West Coast of the USA. In California, Heaton (1985) put forward the proposal of the first EEW system including a feasibility report. Keeping in mind the severity of damage during some large magnitude earthquakes, the United States Geological Survey (USGS) is upgrading the ShakeAlert EEW system since 2006 (Kohler et al. 2018). The ShakeAlert is a regional EEW approach in which data from various stations is analyzed for the earthquake size and location and based on the expected shaking, the warning may range from a few seconds to tens of seconds. USGS is partnering with other agencies in the US including the California Institute of Technology (Caltech) and the California Geological Survey (CGS), to expand and upgrade the existing seismic network to have wide coverage. During phase 3, the system was tested for statewide alerts in 2019. As of 2021, the ShakeAlert system is sending alerts to users in the states of California, Oregon, and Washington. In the next step, USGS is planning to integrate GPS ground displacements data obtained using Real-time Global Navigation Satellite System (GNSS), and low-cost sensors in the existing network to strengthen it (Murray et al. 2018). In case of magnitude saturation using only seismic instruments (Kuyuk and Allen 2013), this displacement data will help estimate the magnitude of great earthquakes precisely.
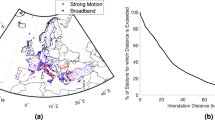
China A group of scientists in China recommended the construction of an EEW system for the whole country following the 2008 Wenchuan earthquake. Initially, a feasibility report was prepared, and based on the recommendations, China Earthquake Administration (CEA) prepared the National System for Fast Seismic Intensity Report and proposed to develop an EEW system soon (Peng et al. 2020). The EEW system will largely focus on the four seismic zones, including the Beijing capital region, the north–south seismic belt, southeastern coastal areas, and the northern Xinjiang area, making it the largest EEW system in the world (Peng et al. 2020). To instrument all these seismic zones with traditional accelerometers, around 10,000 instruments with an interstation spacing of 10–15 km will be required (Peng et al. 2020). The use of low-cost MEMS-based instruments was recommended to make the system cost-effective (Peng et al. 2017). So far, the feasibility tests have been conducted for the Beijing capital region (Peng et al. 2011) and Fujian Province of southeastern coastal areas (Zhang et al. 2016), using the existing networks of strong-motion and broadband instruments.
South Korea The earthquake information in present times is available to the public within 3 m of the occurrence of an earthquake (Sheen et al. 2017). The Korean Earthquake Early Warning System (KEEWS) is designed to warn the public and issue a warning within the 50 s for an earthquake having a magnitude ≥ 5. Korea Meteorological Administration (KMA) handles the functioning of KEEWS and started issuing EEW information in January 2015 (Sheen et al. 2017). The system functions following the guidelines of the Elarms-2 methodology initially developed at the University of California (Kuyuk et al. 2014). The methodology was modified for the Korean region based on the sensors arrangement. The EEW time was reduced to 10-25 s during September 12, 2016 earthquakes (Sheen et al. 2017). In the future, KMA plan to increase the number of stations to have wider coverage and provide warnings well ahead of the high magnitude earthquake.
India India is one of the countries that face a seismic threat from different regions, namely north and the northeast Himalayas, Kuchchh region in Gujarat, and Nicobar Island in the southeast part (Kumar and Mittal 2018). The construction of a single EEW for the whole country is not feasible. Different agencies namely the Institute of Seismological Research (ISR), Indian Institute of Technology, Roorkee (IITR), National Center for Seismology (NCS), Ministry of Earth Sciences (MoES), and Uttarakhand Government are participating in the building of EEWS for different regions. Three seismic gaps are identified along the Indian Himalayan belt that did not rupture in the last hundred years. The central seismic gap (CSG) lying between the source zone of the 1905 Kangra earthquake and the 1934 Nepal Bihar earthquake is the longest one and can be a possible zone for future great earthquakes (Khattri 1987; Mittal et al. 2016; Sandeep et al. 2019). Keeping in mind the possibility of a future great earthquake in CSG, an EEWS is installed in the Uttarakhand region of northwest Himalayas. This EEW system consisting of 200 low-cost instruments is capable of providing on-site as well as a regional warning (Kumar et al. 2014). These instruments are procured from Taiwan, and so follow the methodology of Taiwan EEWS after performing modifications according to Indian conditions. This EEWS can provide a large lead time (60–90 s) for densely populated cities located around 300 km away from the system (Bhardwaj et al. 2018; Mittal et al. 2019b). In the absence of the data from some bigger earthquakes, Mittal et al. (2019b) used the ground motion data from Taiwan and tested the performance of EEW in India. Some other researchers (Chamoli et al. 2021), used the data of smaller events and even the synthesized data to check the functioning of EEW. ISR on the other hand is building the EEW network for the Kuchchh region. They checked the feasibility of the EEW network using the strong-motion and broadband data from the existing network (Kumar et al. 2020).
A comprehensive comparison of worldwide regression relations for EEWS is given in Table 5.
4 Challenges in the EEW System and Future Work
The earthquake early warning system is one of the novel techniques that has emerged in the last two decades. Detecting real-time earthquakes and providing timely alerts to the general public before the arrival of strong shaking is the prime function of EEWS. Further, the irreplaceable time is provided to both public and industries to take the proper risk-mitigation measures (Heaton 1985). Issuance of a few seconds of warning provides enough time to shut down the automated machinery, move away from glass windows, and move to safer places. Large-magnitude earthquakes can have a wide-ranging impact; nevertheless, earthquake-related damage is often confined to near epicentral distances and around the rupturing fault. As a result, the most important goal for any EEWS is to provide the first notice within no time, allowing notifications to be sent as close to the epicenter as possible. Moreover, the area located far away from the epicenter where earthquakes may cause less damage can benefit from these warnings by using them to create a culture of anticipation and awareness. Since its beginning, a lot of EEW parameters have been established and used widely in different geological conditions to estimate the shaking and earthquake magnitude. These parameters are generally computed using the initial 3–4 s time window after the arrival of the P-wave. Many research groups (Kanamori 2005; Bhardwaj and Sharma 2018; Wang et al. 2020; Wu and Mittal 2021) suggested that an increase in window length would predict the magnitude more precisely but at the same time decrease the warning time (time between alert and ground shaking). The low-frequency drift introduced during the integration process poses difficulty in estimating the correct magnitude. Thus, one must be careful while choosing the cutoff frequency of high pass and bandpass filters, depending upon the geological conditions. Rigorous studies are required to determine the accurate filtering range. The correct magnitude cannot be estimated appropriately for a larger earthquake of magnitude 7 or bigger if the fault plane or rupture grows at the S-wave velocity. In this direction, a constant endeavor was made to detect the seismic intensity, source area to raise the accuracy of earthquake warning systems. To improve the performance of the EEWS, multi-parameters and voting system-based warning systems can also be implemented to investigate the performance of the system. Improving the event detection capabilities in EEW are also a key concern; since the false alarm is issued by misinterpreting seismic signal due to impulsive noise originating from natural sources, especially when sensors are installed in noisy urban environments. Various nuisance signals are impulsive and appear to be real earthquake signals at first glance. One of the most challenging tasks in EEW is to distinguish real local earthquake signals from all other signals as quickly and reliably as possible. The current EEW systems suffer from missed and false alarms owing to the misinterpretation of impulsive signals (Meier et al. 2019). Therefore, researchers are exploring the way to discriminate the unwanted signals from the real earthquake signals to reduce the missed and false alarms. Recently, machine learning algorithms have been applied in several applications (Zhu et al. 2017). Further, Meier et al. (2019) employed a machine learning classifier in seismic signal processing to discriminate the noise. To perform the analysis, 374,000 local earthquakes and 946,000 impulsive noise signals are assembled to train the classifier. Machine learning classifiers have the potential to significantly distinguish EEW real earthquake signals from a wide range of nonrelevant nuisance signals and in turn, improve the reliability of the EEW system. Thus, signal discrimination algorithms and artificial intelligence can be one of the best solutions which may lessen the false alarms to some extent caused by non-earthquake events.
Despite the success of EEWS in many countries involving Japan, Mexico, and Taiwan, it still suffers from many shortcomings. The EEW process is often a challenging task because of various uncertainties involving the correct location (may be misinterpreted because of insufficient instrument coverage), the magnitude estimation (may be underestimated as the rupture is still growing during the higher magnitude earthquake), the region-specific use of ground motion prediction equations (GMPE), communication technology (how fast and using what technology the information is passed to the end-users), and the general public awareness (how the general public perceives the warning).
The wide azimuthal coverage provides more accurate event size estimation that in turn is a significant input for an EEWS (Mittal et al. 2019b). This demands dense instrumentation around the active faults or in seismogenic zones that are susceptible to producing some higher magnitude earthquakes. The instrument network installed by the national agencies should be supplemented by the instruments installed by the houses or industries owners at the local level. However, the high cost of traditional seismographs/accelerographs is a major bottleneck for establishing a dense seismic network in many earthquake-prone countries that face seismic hazards from a wide-spread area. Keeping this in view, many countries are working on the construction of seismic networks using low-cost sensors. Recently, National Taiwan University designed cost-effective P-Alert instruments (Wu 2015). These instruments record three-component ground motion and are installed in many countries (Wu et al. 2019). Moreover, to enhance the system's reliability the strain meters and pressure or acoustic sensors can also be employed with these low-cost P-Alert instruments.
Once a high magnitude earthquake is detected using threshold parameters, the next process is to convey the warning to the end users. In this regard, communication technology plays an important role in warning dissemination. The damaging S-waves or surface waves travel at a slower speed, whereas, the electromagnetic waves used in telecommunication technology travel at the speed of light, allowing sufficient time to warn the public. Modern communication technology like mobile and internet services should be preferred over the traditional warning methods involving television and radio as they have limited coverage. Additionally, to expedite the data processing, fiber optics cable-based observatories have the potential to increase the speed with which unfolding events are detected, and hence warnings are issued.
Along with these factors, the success of an EEWS also depends on the earthquake hazard assessment of the country. For this, the earthquake’s parameters and hazards in real-time should be addressed before the arrival of damaging S-waves and surface waves. Japan’s EEW system is considered to be revolutionary and they have attained this with rigorous research work, designing the buildings according to strict building codes, and the education at school and society level for disaster preparedness. The stringent building codes of Japan ensure the prevention of buildings collapse by dampening the vibrations. Hence, following building codes and educating the public about earthquakes will ensure the smooth functioning of EEW in other countries as well. The other countries having EEW operational or planning to install should take into consideration all the above factors.
Also, the damage probability and degree of damages for a ground motion are not the same across different types of structures. European research groups have mentioned the idea of combining earthquake early warning systems and structural health monitoring for damage assessment of the structures (Rainieri et al. 2011; Satriano et al. 2011).
Other examples include structural control of highway bridges (Maddaloni et al. 2011) and buildings (Rainieri et al. 2011; Kumar and Kumar 2017; Kumar et al. 2018, 2021). Once the EEW system senses the earthquake signal and issues the warning then the control system will be activated well in advance before hitting the earthquake for swift action. The controller may have vibrations of the infrastructure and output of the magnetorheological (MR) damper as its input to decide the amount of the command signal (Kumar and Kumar 2017). The control system integrated with the building uses an MR damper that adjusts the MR damper behavior based on the predicted intensity of an incoming earthquake provided by the EEW system to achieve the best seismic response of the hosting structure. Thus, structural control mechanisms and EEW bring together that could swiftly change the characteristics of a building to a large extent which would reduce the structural vulnerability and enhance the seismic structural response. Owing to phenomenal progress in the field of electronics the high-speed digital signal processing processor for the controller are available which can process this information in real-time.
The success of an EEW system is judged in terms of the response of society to the warnings. For this, the public should be educated about how to respond when a warning is received. Earthquake preparedness should be taught at school and society levels and mock drills should be conducted at regular intervals. The performance of the earthquake early warning system in the Sichuan province of China during the 2019 Changning earthquake is tested with the first alert issued 10 s after the earthquake and it has been noticed that a significant gap exists between the warning system’s message and the public’s response (Zhang et al. 2021). Therefore, effective tactics should be taught and explained; what necessary actions should be needed before, during, and after an earthquake. The rigorous research is to be carried out to test for automatic actions like opening emergency doors, shutting down water valves, and slowing trains, which could lead to the creation of a new EEW industry.
References
Alcik H, Ozel O, Wu YM, Ozel NM, Erdik M (2011) An alternative approach for the Istanbul earthquake early warning system. Soil Dyn Earthq Eng 31(2):181–187
Alcik H, Ozel O, Apaydin N, Erdik M (2009) A study on warning algorithms for Istanbul earthquake early warning system. Geophys Res Lett 36(5)
Allen RM, Kanamori H (2003) The potential for earthquake early warning in southern California. Science. https://doi.org/10.1126/science.1080912
Bhardwaj R, Sharma ML (2018) Lead time for cities of Northern India by using multiparameter EEW algorithm. Int J Geophys. https://doi.org/10.1155/2018/9086205
Bock Y, Nikolaidis RM, de Jonge PJ, Bevis M (2000) Instantaneous geodetic positioning at medium distances with the global positioning system. J Geophys Res Solid Earth 105(B12):28223–28253
Bohnhoff M, Bulut F, Dresen G, Malin PE, Eken T, Aktar M (2013) An earthquake gap south of Istanbul. Nat Commun 4(1):1–6
Boore DM, Bommer JJ (2005) Processing of strong-motion accelerograms: needs, options and consequences. Soil Dyn Earthq Eng 25(2):93–115
Böse M, Ionescu C, Wenzel F (2007) Earthquake early warning for Bucharest, Romania: novel and revised scaling relations. Geophys Res Lett. https://doi.org/10.1029/2007GL029396
Böse M, Wenzel F, Erdik M (2008) PreSEIS: a neural network-based approach to earthquake early warning for finite faults. Bull Seismol Soc Am 98(1):366–382. https://doi.org/10.1785/0120070002
Bradley BA (2015) Correlation of arias intensity with amplitude, duration and cumulative intensity measures. Soil Dyn Earthq Eng 78:89–98. https://doi.org/10.1016/j.soildyn.2015.07.009
Brown HM, Allen RM, Grasso VF (2009) Testing elarms in Japan. Seismol Res Lett 80(5):727–739. https://doi.org/10.1785/gssrl.80.5.727
Campbell KW, Bozorgnia Y (2008) NGA ground motion model for the geometric mean horizontal component of PGA, PGV, PGD and 5% damped linear elastic response spectra for periods ranging from 0.01 to 10 s. Earthq Spectra 24(1):139–171. https://doi.org/10.1193/1.2857546
Campbell KW, Bozorgnia Y (2012) Cumulative absolute velocity (CAV) and seismic intensity based on the PEER-NGA database. Earthq Spectra 28(2):457–485. https://doi.org/10.1193/1.4000012
Chamoli BP, Kumar A, Chen DY, Gairola A, Jakka RS, Pandey B, Kumar P, Rathore G (2021) A prototype earthquake early warning system for northern India. J Earthq Eng 25(12):2455–2473
Chen DY, Hsiao NC, Wu YM (2015) The earthworm based earthquake alarm reporting system in Taiwan. Bull Seismol Soc Am 105(2A):568–579. https://doi.org/10.1785/0120140147
Chen DY, Wu YM, Chin TL (2017) An empirical evolutionary magnitude estimation for early warning of earthquakes. J Asian Earth Sci 135:190–197. https://doi.org/10.1016/j.jseaes.2016.12.028
Colombelli S, Zollo A, Festa G, Kanamori H (2012) Early magnitude and potential damage zone estimates for the great Mw9 Tohoku-Oki earthquake. Geophys Res Lett. https://doi.org/10.1029/2012GL053923
Cooper JD (1868) Earthquake indicator. San Francisco Bulletin, 3. San Franc. Publ. Co., San Francisco, CA
Cyranoski D (2011) Japan faces up to failure of its earthquake preparations: systems for forecasting, early warning and tsunami protection all fell short on 11 March. Nature 471(7340):556–558
EPRI (1991) Standardization of the cumulative absolute velocity. In: Electric Power Research Institute, Palo Alto, CA, prepared by Yanke Atomic Electric Company Report No: TR-100082
Erdik M, Fahjan Y, Ozel O, Alcik H, Mert A, Gul M (2003) Istanbul earthquake rapid response and the early warning system. Bull Earthq Eng 1(1):157–163
Espinosa Aranda JM, Jimenez A, Ibarrola G, Alcantar F, Aguilar A, Inostroza M, Maldonado S (1995) Mexico City seismic alert system. Seismol Res Lett 66:42–53. https://doi.org/10.1785/gssrl.66.6.42
Esteva L (1988) The Mexico earthquake of September 19, 1985-consequences, lessons, and impact on research and practice. Earthq Spectra 4(3):413–426. https://doi.org/10.1193/1.1585482
Festa G, Picozzi M, Caruso A, Colombelli S, Cattaneo M, Chiaraluce L, Elia L, Martino C, Marzorati S, Supino M, Zollo A (2018) Performance of earthquake early warning systems during the 2016–2017 Mw 5–6.5 Central Italy sequence. Seismol Res Lett 89(1):1–12. https://doi.org/10.1785/0220170150
Fujinawa Y, Noda Y (2013) Japan’s earthquake early warning system on 11 March 2011: performance, shortcomings, and changes. Earthq Spectra 29(1):341–368
Gizzi FT, Potenza MR (2020) The scientific landscape of November 23rd, 1980 Irpinia-Basilicata Earthquake: taking stock of (almost) 40 years of studies. Geosciences 10(12):482
Heaton TH (1985) A model for a seismic computerized alert network. Science 228(4702):987–990. https://doi.org/10.1126/science.228.4702.987
Holland A (2003) Earthquake data recorded by the MEMS accelerometer: field testing in Idaho. Seismol Res Lett 74(1):20–26. https://doi.org/10.1785/gssrl.74.1.20
Hsiao NC, Wu YM, Shin TC, Zhao L, Teng TL (2009) Development of earthquake early warning system in Taiwan. Geophys Res Lett 36(5):1–12. https://doi.org/10.1029/2008GL036596
Hsiao NC, Wu YM, Zhao L, Chen DY, Huang WT, Kuo KH, Shin TC, Leu PL (2011) A new prototype system for earthquake early warning in Taiwan. Soil Dyn Earthq Eng 31(2):201–8
Hsieh CY, Yih-Min W, Tai-Lin C, Kuo KH, Da-Yi C, Wang KS, Ya-Ting C, Wen-Yen C, Wei-Sen L, Ker SH (2014) Low cost seismic network practical applications for producing quick shaking maps in Taiwan. TAO Terrestrial Atmos Oceanic Sci 25(5):617. https://doi.org/10.3319/TAO.2014.03.27.01(T)
Hsu TY, Lin PY, Wang HH, Chiang HW, Chang YW, Kuo CH, Lin CM, Wen KL (2018) Comparing the performance of the NEEWS earthquake early warning system against the CWB system during the 6 February 2018 Mw 6.2 Hualien earthquake. Geophys Res Lett 45(12):6001–6007
Iglesias A, Singh SK, Ordaz M, Santoyo MA, Pacheco J (2007) The seismic alert system for Mexico City: an evaluation of its performance and a strategy for its improvement. Bull Seismol Soc Am 97(5):1718–1729. https://doi.org/10.1785/0120050202
Ismail-Zadeh A (2021) Natural hazards and climate change are not drivers of disasters. Nat Hazards. https://doi.org/10.1007/s11069-021-05100-1
Ismail-Zadeh A, Sokolov V, Bonjer KP (2007) Tectonic stress, seismicity, and seismic hazard in the southeastern Carpathians. Nat Hazards 42(3):493–514
Ismail-Zadeh A, Matenco L, Radulian M, Cloetingh S, Panza G (2012) Geodynamics and intermediate-depth seismicity in Vrancea (the south-eastern Carpathians): current state-of-the art. Tectonophysics 530:50–79
Johnson CE, Bittenbinder A, Bogaert B, Dietz L, Kohler W (1995) Earthworm: a flexible approach to seismic network processing. Iris Newsletter 14(2):1–4
Kanamori H (2005) Real-time seismology and earthquake damage mitigation. Annu Rev Earth Planet Sci 33:195–214. https://doi.org/10.1146/annurev.earth.33.092203.122626
Khattri KN (1987) Great earthquakes, seismicity gaps and potential for earthquake disaster along the Himalaya plate boundary. Tectonophysics 138(1):79–92
Kodera Y, Yamada Y, Hirano K, Tamaribuchi K, Adachi S, Hayashimoto N, Morimoto M, Nakamura M, Hoshiba M (2018) The propagation of local undamped motion (PLUM) method: a simple and robust seismic wavefield estimation approach for earthquake early warning. Bull Seismol Soc Am 108(2):983–1003
Kohler MD, Cochran ES, Given D, Guiwits S, Neuhauser D, Henson I, Hartog R, Bodin P, Kress V, Thompson S, Schwarz S (2018) Earthquake early warning ShakeAlert system: west coast wide production prototype. Seismol Res Lett 89(1):99–107. https://doi.org/10.1785/0220170140
Kumar G, Kumar A (2017) Fourier transform and particle swarm optimization based modified LQR algorithm for mitigation of vibrations using magnetorheological dampers. Smart Mater Struct 26(11):115013. https://doi.org/10.1088/1361-665X/aa8681
Kumar R, Zhao W (2018) Predominant frequency detection of seismic signal based on Gabor–Wigner transform for earthquake early warning systems. Asian J Civ Eng 19(8):927–936. https://doi.org/10.1007/s42107-018-0073-9
Kumar G, Kumar A, Jakka RS (2018) The particle swarm modified quasi bang-bang controller for seismic vibration control. Ocean Eng 166:105–116. https://doi.org/10.1016/j.oceaneng.2018.08.002
Kumar S, Mittal H, Roy KS, Wu YM, Chaubey R, Singh AP (2020) Development of earthquake early warning system for Kachchh, Gujarat, in India using τc and Pd. Arab J Geosci 13(14):1–11. https://doi.org/10.1007/s12517-020-05353-3
Kumar A, Mittal H (2018) Strong-motion instrumentation: current status and future scenario. In: Advances in Indian earthquake engineering and seismology. Springer, Cham, pp 35–54
Kumar A, Mittal H, Chamoli BP, Gairola A, Jakka RS, Srivastava A (2014) Earthquake early warning system for northern India. In: 15th symposium on earthquake engineering. Indian Institute of Technology, Roorkee, pp 11–13
Kumar G, Kumar R, Kumar A, Singh BM (2021) Development of modified LQG controller for mitigation of seismic vibrations using swarm intelligence, Int J Autom Control (Accepted for Publication)
Kuyuk HS, Allen RM (2013) A global approach to provide magnitude estimates for earthquake early warning alerts. Geophys Res Lett 40(24):6329–6333. https://doi.org/10.1002/2013GL058580
Legendre CP, Tseng TL, Mittal H, Hsu CH, Karakhanyan A, Huang BS (2017) Complex wave propagation revealed by peak ground velocity maps in the Caucasus Area. Seismol Res Lett 88(3):812–821. https://doi.org/10.1785/0220160178
Lockman AB, Allen RM (2005) Single-station earthquake characterization for early warning. Bull Seismol Soc Am 95(6):2029–2039. https://doi.org/10.1785/0120040241
Lonescu C, Böse M, Wenzel F, Marmureanu A, Grigore A, Marmureanu G (2007) An early warning system for deep Vrancea (Romania) earthquakes. In: Earthquake early warning systems. Springer, Berlin Heidelberg, pp 343–349
Maddaloni G, Caterino N, Occhiuzzi A (2011) Semi-active control of the benchmark highway bridge based on seismic early warning systems. Bull Earthq Eng 9(5):1703–1715. https://doi.org/10.1007/s10518-011-9259-1
Meier MA, Ross ZE, Ramachandran A, Balakrishna A, Nair S, Kundzicz P, Li Z, Andrews J, Hauksson E, Yue Y (2019) Reliable real-time seismic signal/noise discrimination with machine learning. J Geophys Res Solid Earth 124(1):788–800. https://doi.org/10.1029/2018JB016661
Mittal H, Kumar A, Wu YM, Kumar A (2016) Source study of M w 5.4 April 4, 2011 India-Nepal border earthquake and scenario events in the Kumaon-Garhwal Region. Arab J Geosci 9(5):1–15
Mittal H, Wu YM, Lin TL, Legendre CP, Gupta S, Yang BM (2019a) Time-dependent shake map for Uttarakhand Himalayas, India, using recorded earthquakes. Acta Geophys 67(3):753–763. https://doi.org/10.1007/s11600-019-00281-7
Mittal H, Wu YM, Sharma ML, Yang BM, Gupta S (2019b) Testing the performance of earthquake early warning system in northern India. Acta Geophys 67(1):59–75. https://doi.org/10.1007/s11600-018-0210-6
Mittal H, Yang BM, Tseng TL, Wu YM (2021) Importance of real-time PGV in terms of lead-time and shakemaps: results using 2018 ML 6.2 & 2019 ML 6.3 Hualien, Taiwan earthquakes. J Asian Earth Sci 220:104936. https://doi.org/10.1016/j.jseaes.2021.104936
Murray JR, Crowell BW, Grapenthin R, Hodgkinson K, Langbein JO, Melbourne T, Melgar D, Minson SE, Schmidt DA (2018) Development of a geodetic component for the US West Coast earthquake early warning system. Seismol Res Lett 89(6):2322–2336. https://doi.org/10.1785/0220180162
Nakamura Y (1988) On the urgent earthquake detection and alarm system (UrEDAS). In: Proceedings of the 9th world conference on earthquake engineering, vol 7, pp 673–678
Nazeri S, Shomali ZH, Colombelli S, Elia L, Zollo A (2017) Magnitude estimation based on integrated amplitude and frequency content of the initial P wave in earthquake early warning applied to Tehran. Iran Bull Seismol Soc Am 107(3):1432–1438. https://doi.org/10.1785/0120160380
Ohmachi T, Kawamura M, Yasuda S, Mimura C, Nakamura Y (1988) Damage due to the 1985 Mexico Earthquake and the ground conditions. Soils Found 28(3):149–159
Olson EL, Allen RM (2005) The deterministic nature of earthquake rupture. Nature 438(7065):212–215. https://doi.org/10.1038/nature04214
Oncescu MC, Marza VI, Rizescu M, Popa M (1999) The Romanian earthquake catalogue between 984–1997. In: Vrancea earthquakes: tectonics, hazard and risk mitigation. Springer, Dordrecht, pp 43–47
Peng H, Wu Z, Wu YM, Yu S, Zhang D, Huang W (2011) Developing a prototype earthquake early warning system in the Beijing capital region. Seismol Res Lett 82(3):394–403. https://doi.org/10.1785/gssrl.82.3.394
Peng C, Chen Y, Chen Q, Yang J, Wang H, Zhu X, Xu Z, Zheng Y (2017) A new type of tri-axial accelerometers with high dynamic range MEMS for earthquake early warning. Comput Geosci 100:179–187. https://doi.org/10.1016/j.cageo.2017.01.001
Peng C, Ma Q, Jiang P, Huang W, Yang D, Peng H, Chen L, Yang J (2020) Performance of a hybrid demonstration earthquake early warning system in the Sichuan-Yunnan border region. Seismol Res Lett 91(2A):835–846. https://doi.org/10.1785/0220190101
Rainieri C, Fabbrocino G, Cosenza E (2011) Integrated seismic early warning and structural health monitoring of critical civil infrastructures in seismically prone areas. Struct Health Monit 10(3):291–308. https://doi.org/10.1177/1475921710373296
Reed JW, Kassawara RP (1990) A criterion for determining exceedance of the operating basis earthquake. Nucl Eng Des 123(2–3):387–396. https://doi.org/10.1016/0029-5493(90)90259-Z
Sandeep Joshi A, Sah SK, Kumar P, Lal S, Kamal P (2019) Modelling of strong motion generation areas for a great earthquake in central seismic gap region of Himalayas using the modified semi-empirical approach. J Earth Syst Sci 128(4):1–12
Satriano C, Wu YM, Zollo A, Kanamori H (2011) Earthquake early warning: concepts, methods and physical grounds. Soil Dyn Earthq Eng 31(2):106–118. https://doi.org/10.1016/j.soildyn.2010.07.007
Serdar Kuyuk H, Allen RM, Brown H, Hellweg M, Henson I, Neuhauser D (2014) Designing a network-based earthquake early warning algorithm for California: ElarmS-2. Bull Seismol Soc Am 104(1):162–173
Sheen DH, Park JH, Chi HC, Hwang EH, Lim IS, Seong YJ, Pak J (2017) The first stage of an earthquake early warning system in South Korea. Seismol Res Lett 88(6):1491–1498. https://doi.org/10.1785/0220170062
Shieh JT, Wu YM, Allen RM (2008) A comparison of τc and τpmax for magnitude estimation in earthquake early warning. Geophys Res Lett. https://doi.org/10.1029/2008GL035611
Sokolov V, Wenzel F, Furumura T (2009) On estimation of earthquake magnitude in Earthquake EarlyWarning systems. Earth, planets and space 61(12):1275–85
Strauss JA, Allen RM (2016) Benefits and costs of earthquake early warning. Seismol Res Lett 87(3):765–772
Suárez G, Espinosa-Aranda JM, Cuéllar A, Ibarrola G, García A, Zavala M, Maldonado S, Islas R (2018) A dedicated seismic early warning network: the Mexican Seismic Alert System (SASMEX). Seismol Res Lett 89(2A):382–391. https://doi.org/10.1785/0220170184
Tajima F, Hayashida T (2018) Earthquake early warning: what does “seconds before a strong hit” mean? Prog Earth Planet Sci 5(1):1–25
Teng TL, Wu L, Shin TC, Tsai YB, Lee WH (1997) One minute after: strong-motion map, effective epicenter, and effective magnitude. Bull Seismol Soc Am 87(5):1209–1219
Tsang LL, Allen RM, Wurman G (2007) Magnitude scaling relations from P-waves in southern California. Geophys Res Lett. https://doi.org/10.1029/2007GL031077
United Nations (2006) Global survey of early warning systems: an assessment of capacities, gaps and opportunities towards building a comprehensive global early warning system for all natural hazards. Technical report. United Nations
Wang Y, Li S, Song J (2020) Threshold-based evolutionary magnitude estimation for an earthquake early warning system in the Sichuan-Yunnan region, China. Sci Rep 10(1):1–12. https://doi.org/10.1038/s41598-020-78046-2
Wu YM (2015) Progress on development of an earthquake early warning system using low-cost sensors. Pure Appl Geophys 172(9):2343–2351. https://doi.org/10.1007/s00024-014-0933-5
Wu YM, Kanamori H (2005a) Experiment on an onsite early warning method for the Taiwan early warning system. Bull Seismol Soc Am 95(1):347–353. https://doi.org/10.1785/0120040097
Wu YM, Kanamori H (2005b) Rapid assessment of damage potential of earthquakes in Taiwan from the beginning of P waves. Bull Seismol Soc Am 95(3):1181–1185. https://doi.org/10.1785/0120040193
Wu YM, Kanamori H (2008) Development of an earthquake early warning system using real-time strong motion signals. Sensors 8(1):1–9. https://doi.org/10.3390/s8010001
Wu YM, Mittal H (2021) A review on the development of earthquake warning system using low-cost sensors in Taiwan. Sensors 21(22):7649
Wu YM, Teng TL (2002) A virtual subnetwork approach to earthquake early warning. Bull Seismol Soc Am 92(5):2008–2018. https://doi.org/10.1785/0120010217
Wu YM, Zhao L (2006) Magnitude estimation using the first three seconds P-wave amplitude in earthquake early warning. Geophys Res Lett. https://doi.org/10.1029/2006GL026871
Wu YM, Hsiao NC, Teng TL, Shin TC (2002) Near real-time seismic damage assessment of the rapid reporting system. Terrest Atmos Ocean Sci 13(3):313–324
Wu YM, Chen DY, Lin TL, Hsieh CY, Chin TL, Chang WY, Li WS, Ker SH (2013) A high-density seismic network for earthquake early warning in Taiwan based on low cost sensors. Seismol Res Lett 84(6):1048–1054. https://doi.org/10.1785/0220130085
Wu YM, Liang WT, Mittal H, Chao WA, Lin CH, Huang BS, Lin CM (2016) Performance of a low-cost earthquake early warning system (P-alert) during the 2016 ML 6.4 Meinong (Taiwan) earthquake. Seismol Res Lett 87(5):1050–1059. https://doi.org/10.1785/0220160058
Wu YM, Mittal H, Huang TC, Yang BM, Jan JC, Chen SK (2019) Performance of a low-cost earthquake early warning system (P-Alert) and shake map production during the 2018 M w 6.4 Hualien, Taiwan, earthquake. Seismol Res Lett 90(1):19–29. https://doi.org/10.1785/0220180170
Wu YM, Mittal H, Chen DY, Hsu TY, Lin PY (2021) Earthquake early warning systems in Taiwan: current status. J Geol Soc India 97(12):1525–1532
Wu YM, Lin TL (2014) A test of earthquake early warning system using low cost accelerometer in Hualien, Taiwan. In: Early warning for geological disasters. Springer, Berlin, pp 253–261
Wurman G, Allen RM, Lombard P (2007) Toward earthquake early warning in northern California. J Geophys Res Solid Earth. https://doi.org/10.1029/2006JB004830
Yang BM, Huang TC, Wu YM (2018) ShakingAlarm: a nontraditional regional earthquake early warning system based on time-dependent anisotropic peak ground-motion attenuation relationships. Bull Seismol Soc Am 108(3A):1219–1230. https://doi.org/10.1785/0120170105
Yang BM, Mittal H, Wu YM (2021) Real-time production of PGA, PGV, intensity, and Sa shakemaps using dense MEMS-based sensors in Taiwan. Sensors 21(3):943. https://doi.org/10.3390/s21030943
Zhang H, Jin X, Wei Y, Li J, Kang L, Wang S, Huang L, Yu P (2016) An earthquake early warning system in Fujian, China. Bull Seismol Soc Am 106(2):755–765. https://doi.org/10.1785/0120150143
Zhang M, Qiao X, Seyler BC, Di B, Wang Y, Tang Y (2021) Brief communication: effective earthquake early warning systems: appropriate messaging and public awareness roles. Nat Hazard 21(10):3243–3250
Zhu Y, Mottaghi R, Kolve E, Lim JJ, Gupta A, Fei-Fei L, Farhadi A (2017) Target-driven visual navigation in indoor scenes using deep reinforcement learning. In: 2017 IEEE international conference on robotics and automation (ICRA). IEEE, pp 3357–3364
Zollo A, Lancieri M, Nielsen S (2006) Earthquake magnitude estimation from peak amplitudes of very early seismic signals on strong motion records. Geophys Res Lett 33:23. https://doi.org/10.1029/2006GL027795
Zollo A, Amoroso O, Lancieri M, Wu YM, Kanamori H (2010) A threshold-based earthquake early warning using dense accelerometer networks. Geophys J Int 183(2):963–974. https://doi.org/10.1111/j.1365-246X.2010.04765.x
Zollo A, Colombelli S, Elia L, Emolo A, Festa G, Iannaccone G, Martino C, Gasparini P (2014) An integrated regional and on-site Earthquake Early Warning System for Southern Italy: concepts, methodologies and performances. In: Early warning for geological disasters. Springer, Berlin, pp 117–137
Acknowledgements
Authors HM and BS thankfully acknowledge the Director, National Center for Seismology, Ministry of Earth Sciences, New Delhi, for providing necessary permission to participate in this work. Author Sandeep is grateful to the Dept. of Geophysics, Banaras Hindu University, Varanasi, for providing the basic research facility. Authors are indebted to Prof. Michael J. Rycroft (Editor in Chief), Prof. Alik Ismail-Zadeh, and one anonymous reviewer for their constructive comments which helped in shaping the manuscript. All authors contributed towards the revision of the manuscript; however, Dr. Sandeep deserves special appreciation and equal contribution as the corresponding author for his tremendous efforts in improving this manuscript. Data employed in this work were obtained from the KiK-net (website http://www.k-net.bosai.go.jp/k-net/) and is thankfully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Kumar, R., Mittal, H., Sandeep et al. Earthquake Genesis and Earthquake Early Warning Systems: Challenges and a Way Forward. Surv Geophys 43, 1143–1168 (2022). https://doi.org/10.1007/s10712-022-09710-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10712-022-09710-7