
Abstract
This paper presents both experimental and analytical investigation to monitor the effect of dynamic pile-soil-pile interaction on the nonlinear coupled response of a 6-pile group placing in different arrangements of piles under rotating machine induced vibrations. Another aspect of the present study is the theoretical prediction of parameters responsible for the nonlinear coupled response of the pile foundation. The pile groups comprised of hollow steel piles with an outer diameter of 0.114 m and a length of 3 m. Coupled vibration field tests are performed on the pile groups laid in two different set of pile arrangements (2 \(\times\) 3 and 3 \(\times\) 2 pile groups) to obtain the dynamic horizontal and rocking responses of the pile groups under different eccentric moments. For theoretical study, the continuum approach with superposition method is used to determine the nonlinear dynamic responses of the pile groups. The analytical frequency-amplitude responses for both types of vibrating displacements are compared with the dynamic field test results and the variations of the influencing parameters for the nonlinear dynamic response of the soil-pile system are predicted for coupled vibration. For 3 × 2 pile group, the resonant frequencies are found lower and resonant amplitudes are found higher than the values of the 2 × 3 pile group for all eccentric moments. It is also observed that the stiffness and damping of the 3 × 2 pile group shows lesser values than the 2 × 3 pile group even if the input analytical parameters are same for both the pile groups. From the results, it can be concluded that the effect of dynamic pile-soil-pile interaction is more pronounced for 3 × 2 pile group as compared to the 2 × 3 pile group.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In recent years, heavy machines such as turbines, generators, pumps etc. are extensively used in different industries to increase the quality and speed of production. These machineries produce high magnitude of dynamic loads on the foundations. Most often piles are provided in groups with different spacing and arrangements to support these types of foundation. One of the basic complications the pile groups face is the interactions between the piles in groups which have a great impact on the dynamic response of the pile groups. The stiffness of the piles in a group is reduced than the stiffness of an individual pile due to the interaction between the piles. Hence, the stiffness of the pile group reduced than the sum of individual piles of a group which results the reduction in resonant frequency and increment in resonant amplitude values of the pile groups under dynamic load. This behavior creates difficulties to predict the exact values of the resonant frequency and amplitude which is an essential requirement for safe and economic design of the machine foundation. However, dynamic pile-soil-pile interaction can be minimized by placing the piles in a very wide spacing but most of cases that could not be possible because of other design aspects. The group interaction phenomenon is also largely affected by the arrangement of piles in a group even if the number of piles in the group is fixed. Therefore, it is very important for a designer to carefully address these unavoidable issues for the safety and successful design of pile group supported machine foundations.
To assess the actual nonlinear dynamic response of the pile groups, experimental investigations are almost compulsory. In past decades, many researchers adopted the small-scale prototype field vibration tests over the other testing methods because of its fewer requirements of cost and effort. Novak and Grigg (1976) performed dynamic tests on small pile foundations to verify the applicability of a linear-elastic theoretical method and indicated that the dynamic response could be predicted reasonably well with the consideration of static pile group interaction factors introduced by Poulos (1971). El Marsafawi et al. (1992) did dynamic test on two separate pile groups embedded in different types of soil subjected to harmonic motion. Similar kind of dynamic field tests were also performed by Burr et al. (1997) on 13 model pile groups on different sites to investigate the effect of spacing to diameter ratio on the dynamic response of pile groups. Goti et al. (2016) conducted a laboratory experiments to obtain the pile-to-pile interaction factors and impedance functions of fixed headed model pile groups. The effect of soil nonlinearity on dynamic response of pile groups was investigated under horizontal excitation. To understand the complex nonlinear nature of frequency-amplitude responses of piles, Elkasabgy and Naggar (2013); Choudhary et al. (2015) and Biswas and Manna (2018) conducted dynamic field tests on piles with varying foundation weights. The variations of stiffness and damping of piles with frequency are also investigated using the continuum approach analysis. From the studies, it was observed that the theoretical analysis provided a reasonable estimation of frequency-amplitude response curves as compared to the field test results under dynamic loading. Such agreement was achieved by considering a boundary zone around the pile and the soil-pile separation lengths.
The theoretical study is necessary to provide an insight about the actual dynamic phenomena occurred in the field dynamic tests. Among all theoretical approaches to analyze the pile foundations under dynamic loading, the continuous approach analysis is most promisingly and widely used by many researchers because of the advantage of the method to function in nonlinear condition. The linear continuum approach is broadly described by Novak and Aboul-Ella (1978) for single pile embedded in layered soil medium. To account for the soil nonlinearity and the soil-pile separation, Novak and Sheta (1980) incorporated an equivalent nonlinear soil model in the continuum approach. Another soil model was also proposed by Han and Sabin (1995) to provide better estimation of dynamic soil stiffness. Novak and Mitwally (1990) proposed a superposition method along with the continuum approach analysis and evaluated the pile group stiffness using dynamic interaction factors. Later, Kaynia and Kausel (1982) proposed a method to calculate the frequency-dependent dynamic interaction factors for different modes of vibration based on the static interaction factors. Dobry and Gazetas (1988) also proposed a remarkably simple method to evaluate the dynamic interaction factors for homogeneous soil. This study was further extended by Makris and Gazetas (1992) to compute the dynamic interaction factors for nonhomogeneous soil. Novak and other co-researchers complied the continuum approach and the superposition methods as a computer code to predict the dynamic response of the pile foundations. Saitoh et al. (2016) proposed a closed-from solution based on the superposition method to obtain the impedance functions of inclined pile groups for different vibration modes using pile to pile interaction factors.
From the literature, it can be clearly understandable that the effect of dynamic pile-soil-pile interaction on the nonlinear response of pile groups have not been elaborately reported under rotating machine induced dynamic loading. In addition to that coupled vibration field tests and nonlinear dynamic analysis of pile groups with different arrangements are barely conducted to predict the dynamic characteristics of the soil-pile system. Hence in this study, dynamic field tests and nonlinear continuum approach analysis are performed on 3 × 2 and 2 × 3 pile groups to investigate the influence of the dynamic group interaction effect on the nonlinear response of the pile groups with different arrangements of piles under coupled vibrations. From the numerical analysis, variations of the parameters accountable for the nonlinear dynamic response of the pile foundations are presented. The variations of stiffness and damping of the pile groups are also investigated for different eccentric moments and modes of vibration.
2 Experimental Investigation
Coupled vibration tests have been conducted on a 6-pile group with different pile arrangements in between block II and III at Indian Institute of Technology Delhi, Hauz Khas, New Delhi, India. The frequency amplitude responses obtained from the dynamic experiments is compared with the analytical responses to get the stiffness and damping of the pile group.
2.1 Site Characterisation
The vertical soil profile of the test site was characterised by several in-situ and laboratory tests. The standard penetration tests (SPT) was performed in a borehole at different intervals up to a depth of 6.5 m and simultaneously soil samples were collected for laboratory testing. To determine the properties of soil, the laboratory experiments such as bulk density, natural water content, particle size distribution and Atterberg’s limits tests were carried out on collected soil samples. The in-situ and laboratory investigation indicated that the test site consists of sandy silt type of soil. The shear modulus of the soil layers have been evaluated from the following well accepted correlation (Bowles 1996).
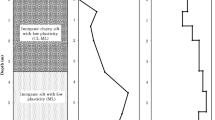
where, Su is undrained shear strength of soil which has been determined according to the SPT-N value. The Poisson’s ratio (µ) for all the soil layers was considered as 0.3. The variation of different soil layers, SPT-Ncorr value and shear modulus with depth is presented in Fig. 1. The measured soil properties of the testing site with depth are listed in Table 1. The shear wave velocity for different depth of soil is deduced from the value of shear modulus of soil which is also presented in Table 1.

Variation of soil layer, SPT-Ncorr value, and shear modulus with depth
2.2 Construction of Pile Group
Hollow steel circular piles having an outer diameter (d) of 0.114 m and a length (L) of 3.0 m (thickness = 3 mm) were used to construct the 6-pile group for the dynamic testing. One side of the piles were closed with circular steel plates for the generation of the pile tip reactions. For installation of the piles, boreholes were made with a helical auger having a diameter of 0.1 m at 3d spacing (s) and the piles were driven into the boreholes with a hammer. A steel pile cap of dimensions 0.9 m × 0.9 m × 0.037 m (weight = 2.5 kN) was rigidly connected with the piles by specially made pile cap connectors. After the installation, the piles were kept undisturbed for a period of 2 months to achieve its natural state. The stepwise installation process of the pile group is presented in Fig. 2.

The stepwise installation process of the pile group: a making of boreholes b driving of piles by SPT hammer c 6-pile group after installation d installed piles with pile cap
2.3 Coupled Vibration Test Setup
Forced vibration tests were performed in the field on the 6-pile groups under the static loads of 10 kN and 14 kN to get the coupled responses (horizontal and rocking) of the pile foundations subjected to different eccentric levels of rotating machine induced vibrations. The coupled excitation forces on pile group were produce by Lazan type mechanical oscillator which was comprised of two counter rotating eccentric masses to generate horizontal harmonic forces. The magnitude of the excitation forces were varied by changing eccentric degree (θ) between the rotating masses. When angle θ was set to a value, the eccentrically rotating masses induce an eccentric moment (me) which could be expressed as
The magnitude of the dynamic load (P) applied on the pile foundation was represented as
where m and W are the mass and weight of the eccentric rotating masses respectively. e is the eccentric distance of the rotating masses and g is the acceleration due to gravity. The circular frequency of the oscillator is ω and t is the time.
After the rest period was over, steel plates of dimensions 0.5 m × 0.5 m × 0.022 m (total weight = 7 kN or 11 kN) were placed on the pile cap to apply desired static weight on the pile group. Then the mechanical oscillator (weight = 0.5 kN) was mounted on top of the loading plates aliening the centre of the oscillator with the centreline of the pile cap. The steel plates and the oscillator were tightly connected with the pile cap with four bolts so that the total loading system was behaved as a single unit. The mechanical oscillator was connected with a 5 hp DC motor through a flexible shaft and the running frequency of the oscillator was controlled by a speed control unit. To measure both horizontal and rocking amplitudes of vibrations simultaneously, two accelerometers and a data accusation system were used. One accelerometer was horizontally attached to the side of the loading setup at the height of centre of gravity (C.G.) on the direction of vibration to measure the horizontal component. For measuring rocking component, another accelerometer was vertically attached at the top of the loading system at a known distance from the projected centre of the pile cap to the direction of the dynamic force. A frequency measurement sensor was also attached to the DC motor to record the frequency of the oscillator. The generated time history data were stored in a laptop through the data accusation system. The schematic and the actual field testing setup of the soil-pile system are presented in Fig. 3.

Complete coupled vibration testing setup of pile foundation a schematic diagram b actual field setup
2.4 Test Programme and Results
The dynamic responses (horizontal and rocking) of the 6-pile groups with different pile arrangements have been measured for four different eccentric moments (W.e = 0.868, 1.269, 1.631 and 1.944 Nm) under the static loads of 10 kN and 14 kN. Two sets of test were performed on 6-pile groups by placing the oscillator in such ways that the unsymmetrical 6-pile group can be considered as 2 \(\times\) 3 pile group and 3 \(\times\) 2 pile group as shown in Fig. 4. To conduct coupled vibration testing for both the pile groups, the horizontal harmonic forces were applied through the mechanical oscillator placed at a height from the C.G. of the pile cap-loading system. This arrangement generated both the horizontal and rocking forces simultaneously at the C.G. of the loading system. The horizontal forces were acted at a height of 0.305 m and 0.402 m from C.G. of the pile cap loading system for the 10 kN and 14 kN static load respectively. The oscillator was run in a controlled manner through the motor to avoid sudden application of high magnitude dynamic load up to the frequency of 50 Hz. The steady state time-acceleration responses of the pile group were recorded at different frequencies for different eccentric moments. The time versus frequency readings were also obtained simultaneously. Typical time versus acceleration response curves for three different frequencies (i.e. 10 Hz, 20 Hz and 30 Hz) are presented in Fig. 5a, b for horizontal and rocking motion respectively. From these measured responses, frequency versus amplitude response curves have been plotted for both horizontal and rocking modes separately. A typical frequency-amplitude response curve of 2 × 3 pile group under Ws = 10 kN are presented in Fig. 6a, b for horizontal and rocking vibration respectively. It is observed from the dynamic test results that the resonant frequencies of the soil-pile system are decreased with the increase of excitation forces and the resonant amplitude values of first peak of the coupled responses are also disproportional to the excitation intensities. This pattern of the response curves indicate the nonlinear behavior of the pile foundations under coupled vibration. From the results, it is also found that there are no second resonant peaks detected within the frequency range of dynamic tests due to the high complex stiffness of the pile groups.

Schematic diagram of pile setup a 2 × 3 pile group and b 3 × 2 pile group

Time versus acceleration response of the 2 × 3 pile group for 10 kN static load a horizontal mode b rocking mode

Frequency versus amplitude response of 2 × 3 pile group for 10 kN static load under coupled vibration a horizontal mode b rocking mode
To demonstrate the nonlinearity of the system more clearly, the experimental responses are also presented in dimensionless form. The dimensionless frequency versus amplitude responses of 2 × 3 pile group is presented in Fig. 7. The dimensionless amplitudes are defined as (Ws/W.e)A, where A is the measured vertical amplitude. The dimensionless frequencies are defined as ωR/Vs, where ω is the measured frequency in radian, R is the radius of pile and Vs is the average shear wave velocity of soil. For a linear system, all the dimensionless response curves of different eccentric moments should collapse onto one curve. However, the figures shows completely opposite behavior as the resonant frequency reduces with the increase of eccentric moments. This behavior indicates that the pile foundations behave in a nonlinear manner under rotating machine induced coupled vibration.

Dimensionless frequency versus amplitude response curves of 2 × 3 Pile group a horizontal mode b rocking mode
3 Theoretical Study
Numerical analysis of the pile groups are performed with software called DYNA 5 (Novak et al. 1999) to determine the nonlinear coupled response under rotating machine induced excitations. The software calculates the stiffness and damping of pile foundations using the continuum approach and superposition method. Based on the continuum approach, the coupled response of single piles are evaluated (Novak and Aboul-Ella 1978) considering linear elastic behavior of soil. The stiffness of the soil medium is deduced in complex form (Novak et al. 1978) using the wave propagation theory, where the real part implies the stiffness of soil and the imaginary part represents the damping of soil. As the soil behavior is hardly linear, a modified equivalent linear soil model (Novak and Sheta 1980) is implemented which can take into account the gradual yielding of soil around the pile with the increase of excitation levels and the separation between the pile and soil at the top layer. In this soil model, a cylindrical boundary zone was proposed around the pile which is characterized by decreased shear modulus and increased damping relative to the outer free-field with no soil mass for preventing wave reflection from the fictitious interface between the cylindrical zone and the outer region (Fig. 8). The complex dynamic stiffness of the composite medium is calculated using wave equations by considering the compatibility conditions at the interface of the two zones. The stiffness and damping of soil mainly depends on boundary zone parameters; such as shear modulus reduction ratio (Gm/G), weak zone soil damping (Dm), thickness ratio (tm/R) and soil-pile separation lengths. The dynamic soil stiffness of the composite medium for the horizontal and rocking motion is expressed as follows:

Model of boundary zone with shear modulus variation
where Su1, Sψ1 = stiffness and Su2, Sψ2 = damping parameters of the complex horizontal (Ku) and rocking (Kψ) soil stiffness respectively and Gm, tm, Dm νm = are the shear modulus, thickness, damping ratio of the weak soil boundary zone and Poisson’s ratio of the inner soil boundary zone respectively. α0 represents the dimensionless frequency, i.e., Rω/Vs, where Vs is the shear-wave velocity of soil. The shear modulus of soil is represented as G and radius of the pile is denoted as R. This equivalent linear complex soil stiffness is included into the analysis for effective implementation of soil nonlinearity in place of the linear complex stiffness without any other theoretical modifications.
In order to find out the dynamic coupled response of the pile group, the superposition method (Novak and Mitwally 1990) is used for the analysis. In this method, the dynamic complex stiffness of pile group is derived from the concept of dynamic interaction factors of individual piles in a group. The dynamic interaction factors (α) can be expressed as
where, the α1 and α2 are the real and imaginary part of the complex dynamic stiffness respectively and i = √ − 1.
The dynamic interaction factors are evaluated form the static interaction factors of El Sharnouby and Novak (1986) for both horizontal and rocking modes of vibration. The frequency dependent dynamic interaction factors can be defined in terms of static interaction factors (αst) as shown below.
F represents a coefficient for the frequency variation of the dynamic interaction factors which are reported by Kaynia and Kausel (1982). The factor is different for real and imaginary part of the complex interaction factors which are varied with the frequency and the relative directional spacing between the piles. Finally, the complex dynamic stiffness of the pile group is calculated by deriving the group interaction matrixes for different modes of vibration using equivalent linear soil model.
All this described methods are compiled as a computer code named DYNA 5 which is used in this study to determine the coupled response of the pile groups subjected to machine induced vibrations.
3.1 Boundary Zone Parameters
From the experimental results, it was found that the responses of the pile groups were nonlinear in nature. Therefore in this study, numerical analysis has been performed using equivalent linear soil model to predict the dynamic nonlinear coupled responses of the pile groups after introducing the boundary zone parameters in the continuum approach analysis. However, the estimation of precise boundary zone parametric values is difficult without the help of experimental results due the lack of guidelines in the literature. Therefore, the values of boundary zone parameters are achieved by trial and error method based on the ranges reported in various literatures (Han and Novak 1988; Vaziri and Han 1992; Elkasabgy and Naggar 2013; Sinha et al. 2015). For different eccentric moments, the values of soil parameters of the weakened zone are varied so that the nonlinear analytical response curves approach towards the coupled vibration test responses. Step-variation patterns are assumed to specify the variations of the boundary zone parameters with depth. The variations of the boundary zone parameters with depth for different eccentric moments are shown in Fig. 9. It can be observed from the figures that the shear modulus reduction ratio (Gm/G) values are increased with depth but in the case of the thickness ratio (tm/R) and the weak zone soil damping (Dm) reverse trend is observed for all excitation intensities. It can also be observed that the shear modulus reduction ratio (Gm/G) are decreased but the weak zone soil damping (Dm) and the thickness ratio (tm/R) are increased as the eccentric moment increases. This phenomenon happens due to the gradual expansion of boundary zone with the increase of eccentric forces. The separation between the pile and soil is also introduced in the analysis using the Gm/G ratio as zero in the topmost layer of the ground. The soil-pile separation lengths are assumed to be constant in the analysis for all the piles in the group. However, different separation lengths are chosen for the different excitation intensities because it is understandable that the separation between the pile and soil will be more for higher eccentric moments than the lower eccentric moments. The assumed separation lengths are considered as 1.49d (= 0.17 m) for W.e = 0.868 Nm and 2.02d (= 0.23 m) for W.e = 1.944 Nm. In this context, it can be mentioned that the stiffness of the soil-pile system are decreased with the increase in shear modulus reduction, boundary zone thickness and length of soil-pile separations. On the other hand, the damping values are incased with the increase of all the parameters except the soil-pile separation length. To make the analysis more realistic for the pile-soil-pile interaction problem, 50% of the boundary zone soil mass i.e. Mass Participation Factor is considered in the analysis for all eccentric intensities although there are no guidelines available in the literature to estimate the value of Mass Participation Factor. The Mass Participation factor represents the amount of boundary zone soil mass participating in the analysis. The damping ratio of the outer soil zone is assumed 0.1 for all layers.

Variations of boundary zone parameters with depth for different excitation levels
3.2 Impedance of the Soil-pile System
After incorporating the best possible variations of the above mentioned boundary zone parametric values, the stiffness and damping (impedance parameters) of the pile groups in different arrangements is determined for both horizontal and rocking modes of vibration. The comparison between the impedance parameters i.e. stiffness and damping of 2 \(\times\) 3 and 3 \(\times\) 2 pile groups are presented in Figs. 10 and 11 for horizontal and rocking modes respectively. It is observed from the analytical results that the stiffness and damping values of 3 \(\times\) 2 pile group is lower than the 2 \(\times\) 3 pile group for both horizontal and rocking modes though the input boundary zone parametric variations are same in both the cases for a particular eccentric moment. This phenomenon implies that the effect of the dynamic pile-soil-pile interaction for the 3 \(\times\) 2 pile group is more prominent than the 2 \(\times\) 3 pile group. It is also observed from the figures that the interaction effects are more significant at lower eccentric moments as the difference between both the stiffness and damping values of lower eccentric intensity are greater than the higher eccentric intensity. Due to the interaction effect, the changes in stiffness values are found salient over damping values for both horizontal and rocking modes. The reduction in stiffness values for the pile-soil-pile interaction effect is also found greater in the case of rocking mode than the horizontal mode.

Variation of soil-pile system a stiffness and b damping of the 2 × 3 pile group and 3 × 2 pile group for horizontal mode with frequency

Variation of soil-pile system a stiffness and b damping of the 2 × 3 pile group and 3 × 2 pile group for horizontal mode with frequency
It is also found from the figures that the stiffness and damping values are decreased with the increase in eccentric moment as well as operating frequency for both modes of vibration. However, the variations of damping values with the change of excitation forces are found less in comparison of stiffness values for horizontal and rocking modes of vibration. From the frequency-damping curves, it is also observed that the damping of soil-pile system are rapidly increased as the frequency approaches towards zero due to the conversion of frequency-independent soil material damping into the frequency-dependent equivalent viscous damping with the increase of frequency.
4 Comparison of Experimental and Analytical Results
The nonlinear analysis of 2 \(\times\) 3 and 3 \(\times\) 2 pile groups are performed by Novak’s continuum approach and superposition method (DYNA 5) using the anticipated input boundary zone parametric values and assumed soil-pile separation lengths for different eccentric moments. The analytical frequency versus amplitude responses of both the pile groups are compared with the dynamic test results and presented in Figs. 12 and 13 for horizontal and rocking modes respectively under the static load of 14 kN. From the comparison curves, it is observed that the predicted resonant frequencies and amplitude values are matched reasonably well with the dynamic test results under both horizontal and rocking motions. Likewise dynamic test results, the analytical results are also showing nonlinearity as the resonant frequencies are decreased and amplitudes are increased with the increase in eccentric forces. It is also well noted from the figures that both the horizontal and rocking resonant amplitude values of 2 \(\times\) 3 pile group is lower than the 3 \(\times\) 2 pile group values for any particular eccentric intensities. However, in the case of resonant frequencies the trend is totally opposite. This behavior of the results proves that the dynamic pile-soil-pile interaction phenomenon is eminent in the 3 \(\times\) 2 pile group than the 2 \(\times\) 3 pile group.

Comparison of between test results and analytical results obtained for 14 kN static load under horizontal mode a 2 × 3 pile group and b 3 × 2 pile group

Comparison of between test results and analytical results obtained for 14 kN static load under rocking mode a 2 × 3 pile group and b 3 × 2 pile group
The comparison between the resonant frequencies and corresponding amplitude values of the 2 \(\times\) 3 and 3 \(\times\) 2 pile groups obtained from both the dynamic test and theoretical analysis is listed in Tables 2 and 3 for the static load of 10 kN and 14 kN respectively. A noticeable difference in resonant frequencies and resonant amplitude values are found between the 2 \(\times\) 3 and 3 \(\times\) 2 pile groups due to the dynamic group interaction effect. From the table, it is observed that the amplitude values of 3 \(\times\) 2 pile groups are more with respect to the 2 \(\times\) 3 pile group by 6% to 18% for horizontal mode and 51% to 80% for rocking mode because of the greater dynamic pile-soil-pile interaction effect of the 3 \(\times\) 2 pile group than the 2 \(\times\) 3 pile group. On the other hand, the resonant frequencies of the 3 \(\times\) 2 pile group are decreased by 6% to 15% as compared to the 2 \(\times\) 3 pile group due to group interaction effect. These differences in resonant frequency and amplitude values are increased with the increase of static weight. It is also found from the tables that the resonant frequencies and amplitudes are decreased with the increase in static load for both the pile groups.
5 Conclusions
In this study, the dynamic pile-soil-pile interaction behavior of a 6-pile group placing in different arrangements (2 \(\times\) 3 and 3 \(\times\) 2 pile groups) is investigated by conducting coupled vibration tests in the field and the continuum approach analysis. By comparing the dynamic test and analytical results, the dynamic group interaction effect on the stiffness and damping of the pile groups are monitored. Based on the experimental and analytical results, the following conclusions can be drawn:
-
1.
The dynamic coupled responses of the pile groups obtained from the experiments and analysis shows nonlinear nature of the soil-pile system.
-
2.
It is found from the study that pile arrangement has a significant effect on the dynamic responses as well as siffness and damping of pile groups.
-
3.
The stiffness and damping values of 3 \(\times\) 2 pile group are found lesser than the 2 \(\times\) 3 pile group for both horizontal and rocking modes which indicates that the dynamic pile-soil-pile interaction phenomenon of the 3 \(\times\) 2 pile group is more effective than the 2 \(\times\) 3 pile group.
-
4.
A considerable differences in resonant frequencies and corresponding amplitude values are observed between the 2 \(\times\) 3 and 3 \(\times\) 2 pile groups due to dynamic group interaction effect. The 3 \(\times\) 2 pile group produces reasonably higher resonant amplitude and lower resonant frequency values than the 2 \(\times\) 3 pile group for all eccentric intensities. This behavior also implies that the effect of dynamic pile-soil-pile interaction phenomenon is greater in the 3 \(\times\) 2 pile group than the 2 \(\times\) 3 pile group.
-
5.
The nonlinear response of the pile groups can be accuratly predicted by the continuum approach analysis with a resonable assumption of the boundary zone parametric values and soil-pile separation lengths.
-
6.
The complex stiffness of the pile groups are decreased with the increase in ecentric moments due to gradual progress of the boundary zone with the increase of ecentric moment.
-
7.
Both resonant frequencies and corresponding amplitudes of the pile groups are decreased due to increse of static weight on pile foundation.
The main intension of this study is to understand the influence of pile arrangement in a group on the dynamic coupled response of the pile group with same number of piles. It is found from the results that the pile arrangement have a significant influence on the pile-soil-pile interaction behavior which can alter the stiffness of the pile groups even if the number of piles in the group is same. As a result, a pile group can show different values of the resonant frequency and amplitude under same magnitude of dynamic load depending on the arrangement of the piles in the group. Generally, more numbers of piles are used in a pile group than the number of piles used in the present study. However, it is understandable that the effect of interaction to reduce the dynamic stiffness of the pile group will be more if numbers of piles are increased in the group. Hence, designers should arrange the piles in such a way that the pile can exhibits maximum value of the dynamic stiffness for safe and economic design of the pile supported machine foundation.
References
Biswas S, Manna B (2018) Experimental and theoretical studies on the nonlinear characteristics of soil-pile systems under coupled vibrations. J Geotech Geoenviron Eng ASCE. https://doi.org/10.1061/(ASCE)GT.1943-5606.0001850
Bowles JE (1996) Foundation analysis and design, 5th edn. The McGraw-Hill Companies Inc, New York
Burr JP, Pender MJ, Larkin TJ (1997) Dynamic response of laterally excited pile groups. J Geotech Geoenviron Eng ASCE 123(1):1–8
Choudhary SS, Biswas S, Manna B (2015) Dynamic coupled response of 6-pile groups with different pile arrangements. In: The 15th Asian regional conference on soil mechanics and geotechnical engineering. Fukuoka, Japan 1389–1392.
Dobry R, Gazetas G (1988) Simple method for dynamic stiffness and damping of floating pile groups. Geotechnique 38(4):557–574
Elkasabgy M, El Naggar MH (2013) Dynamic response of vertically loaded helical and driven steel piles. Can Geotech J 50:521–535
El Marsafawi H, Han YC, Novak M (1992) Dynamic experiments on two pile groups. J Geotech Eng ASCE 118(4):576–592
El Sharnouby B, Novak M (1986) Flexibility coefficients and interaction factors for pile group analysis. Can Geotech J 23(4):441–450
Goit CS, Saitoh M, Mylonakis G (2016) Principle of superposition for assessing horizontal dynamic response of pile groups encompassing soil nonlinearity. Soil Dyn Earthquake Eng 82:73–83
Han YC, Novak M (1988) Dynamic behavior of single piles under strong harmonic excitation. Can Geotech J 25:523–534
Han YC, Sabin GCW (1995) Impedances of radially inhomogeneous viscoelastic soil media. J Eng Mech ASCE 121(9):939–947
Kaynia AM, Kausel E (1982) Dynamic behavior of pile groups.In: 2nd Internaional conference on numerical methods in offshore piling 509–532.
Makris N, Gazetas G (1992) Dynamic pile-soil-pile interaction part II: Lateral and seismic response. Earthq Eng Struct Dyn 21(2):145–162
Novak M, Aboul-Ella F (1978) Impedance functions for piles embedded in layered medium. J Eng Mech ASCE 104(3):643–661
Novak M, El Naggar MH, Sheta M, El Hifnawy L, El Marsafawi H, Ramadan O (1999) DYNA 5–a Computer program for calculation of foundation response to dynamic loads. University of Western Ontario, Geotechnical Research Centre, London
Novak M, Grigg RF (1976) Dynamic experiments with small pile foundations. Can Geotech J 13:372–385
Novak M, Mitwally H (1990) Random response of offshore towers with pile-soil-pile interaction. J Offshore Mech Arctic Eng 112:35–41
Novak M, Nogami T, Aboul-Ella F (1978) Dynamic soil reactions for plane strain case. J Eng Mech ASCE 104(4):953–959
Novak M, Sheta M (1980) Approximate approach to contact problems of piles. In: M O’Neill et al (eds) Proceedings of the dynamic response of pile foundations: analytical aspects. ASCE, New York, pp 53–79.
Poulos HG (1971) Behaviour of laterally loaded piles II: pile groups. J Soil Mech Found Eng ASCE 97(SM5):733–751
Saitoh M, Padron LA, Aznarez JJ, Maeso O, Goit CS (2016) Expanded superposition method for impedance functions of inclined-pile groups. Int J Numer Anal Methods Geomech 40:185–206
Sinha SK, Biswas S, Manna B (2015) Nonlinear characteristics of floating piles under rotating machine induced vertical vibration. Geotech Geol Eng 33:1031–1046
Vaziri H, Han Y (1992) Nonlinear vibration of pile groups under lateral loading. Can Geotech J 29:702–710
Funding
None.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Choudhary, S.S., Biswas, S. & Manna, B. Effect of Pile Arrangements on the Dynamic Coupled Response of Pile Groups. Geotech Geol Eng 39, 1963–1978 (2021). https://doi.org/10.1007/s10706-020-01599-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10706-020-01599-6