
Abstract
This paper presents an adaptive neuro-fuzzy inference system (ANFIS) for the evaluation of ground vibration due to blasting. The training of ANFIS was performed by a hybrid method of gradient descent method and least square algorithm. The least square algorithm is used to optimize the consequent parameters with the premise parameters fixed. Seven factors including the hole depth, burden, spacing, stemming, maximum charge per delay, charge and distance, were taken into account as the input parameters of the ANFIS model, whereas the peak particle velocity is the output parameter. The results show that the proposed ANFIS model is a feasible, efficient, and accurate tool for predicting the ground vibration due to blasting.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
It is generally known that the drilling and blasting combination is still an economical and viable method for rock excavation and displacement in mining as well as in civil construction works (Mohammadnejad et al. 2011). The blasting process and use of explosives, however, produce many ill effects, i.e. ground vibrations, air blasts, fly rocks, back breaks, noises. Among all the ill effects, ground vibration is major concern to the planners, designers and environmentalists (Khandelwal and Singh 2007). Blast vibrations from blasting are acoustic waves that propagate through the earth. They are often termed as seismic waves because their propagation characteristics are similar to the ground motions produced by earthquakes (Singh and Singh 2005; Singh and Roy 2008). These vibrations induce a resonance in the structures if the frequency of ground vibration matches with the frequency of the structure and due to this, amplitude of the vibration may exceed the amplitude of the initial ground vibrations (McKenzie 1990). Because human beings are remarkably sensitive to vibration, so questions frequently arise about blast vibration effects and specifically about whether vibrations can or could have caused cracking and other damage in homes and other structures (Singh and Roy 2010). Therefore, it is very important to predict the blast-induced ground vibration.
Ground vibration is a simultaneous phenomenon in any blasting operation and it is influenced by many parameters (Monjezi et al. 2010), such as geological and geotechnical characteristics of the rockmass, burden, spacing, stemming, sub-drilling, delay time. These parameters individually as well as collectively influence the ground vibration, which indicates that most of the parameters are closely interrelated. In recent years, many vibration predictors have been proposed by different researchers for the prediction of peak particle velocity (PPV) (Berta 1994; Venkatesh 2005). All the predictors estimate the PPV mainly based on two parameters (maximum charge used per delay and distance between blast face and monitoring point). However, PPV is influenced by various geological, geotechnical, blast geometry and explosive parameters, which have been incorporated in any of the available predictors, and all of these predictors, have their site specific constants and they cannot be used in a generalized way. Furthermore, some of the pertinent parameters are not clearly understood or the effect of others is difficult to quantify. With such limitations or constraints, ground vibration prediction requires new innovative methods such as artificial neural network (ANN). The greatest advantage of ANN over traditional modeling techniques is their ability to capture non-linear and complex interaction between variables of the system without having to assume the form of the relationship between input and output variables. ANN model has been used in the case of PPV prediction in recent years. For example, Khandelwal and Singh (2006) utilized four empirical predictors to estimate the PPV values for 150 blasting operations and the obtained results were compared to the measured data. Subsequently, an ANN model was proposed for the prediction of PPV using the same data. They found that ANN results were more accurate when compared to empirical predictors. Monjezi et al. (2013) predicted PPV values using ANN model and the obtained results were compared to the recorded data in Shur River Dam, Iran, as well as obtained results by empirical equations. Finally, they concluded that the ANN model has higher performance capacity when compared to the empirical equations. However, the main disadvantage of the ANN approach is the large complexity of the network structure, as it represents the knowledge in terms of a weight matrix together with biases which are not accessible to user. Fuzzy modeling being one of the most competent artificial intelligence subsystem, can deal with complicated and ill-defined systems in a flexible and consistent way (Bhoopal et al. 2012). In the last two decades, an increase in fuzzy model applications has been observed in many fields, such as the evaluation of slope failure potential (Ni et al. 1996), mapping of CPT values into soil dynamics properties (Romo and Garcia 2003), settlement prediction of shallow foundations on granular soils (Shahin et al. 2003), ground vibration prediction caused by blasting (Ghasemi et al. 2013; Armaghani et al. 2015).
In this study, an integrated fuzzy neural network model, called adaptive neuro-fuzzy inference system (ANFIS), is developed for the prediction of ground vibration caused by blasting. The training of fuzzy system was performed by a hybrid method of gradient descent method and least square algorithm. The least square algorithm is used to optimize the consequent parameters with the premise parameters fixed. The performances of these techniques were evaluated in terms of training performance and classification accuracies using experimental data in the literature. The results confirmed that the proposed ANFIS model has potential in accurately forecasting the ground vibration caused by blasting.
2 Fuzzy Logic
Fuzzy logic is based on the theory of fuzzy sets, which was first developed by Zadeh (1965). Fuzzy logic allows the mapping of an input space to an output space based on membership functions, fuzzy logic operations and parallel if–then rules: an overall process called fuzzy inference. Fuzzy logic system contains four components: fuzzifier, rules, inference engine, and defuzzifier. Once the rules have been established, a fuzzy logic system can be viewed as a mapping from inputs to outputs. Figure 1 shows a fuzzy logic system that is widely used in fuzzy logic controllers.

Schematic diagram of a fuzzy inference system
3 Adaptive Neuro-Fuzzy Inference System (ANFIS)
In this study, a Takagi-Sugeno-Kang type fuzzy model (Takagi and Sugeno 1985) is used. This model includes two main components: the antecedent and the consequent parts. For simplicity, the ANFIS structure is set to have two inputs x and y as shown in Fig. 2 and explained as follows.

Adaptive neuro-fuzzy inference system
This fuzzy model has rules in the following forms:
-
Rule 1: If x is A1 and y is B1, then f 1 = p 1 x + q 1 y + r 1
-
Rule 2: If x is A2 and y is B2, then f 2 = p 2 x + q 2 y + r 2
where A1, A2 B1, and B2 are the membership functions for inputs x and y, respectively; p 1, q 1, r 1, p 2, q 2, and r 2 are the parameters of the output function. The functioning of each layer is described as follows (Jang 1993):
Layer 1: Each node i in this layer generates membership grades of an input variable. For instance, the node function of the ith node might be
where x is the input to node i, and A i is the linguistic label (small, large, etc.) associated with this node, and {a i , b i , c i }is the parameter set that changes the shapes of the membership function. Parameters in this layer are referred to as the “premise parameters”.
Layer 2: Each node in this layer calculates the ‘firing strength’ of each rule via multiplication:
The output node w i indicates the firing strength of a rule.
Layer 3: The ith node of this layer, labeled as N, computes the normalized firing strengths as
where \(\bar{w}_{i}\) denotes the normalized firing strength.
Layer 4: Node i in this layer computes the contribution of the ith rule towards the model output, with the following node functions:
where parameters p i , q i , r i are typically known as consequent parameters.
Layer 5: The single node in this layer computes the overall output of the ANFIS as
It is clear that the ANFIS has two sets of adjustable parameters, namely the premise and consequent parameters. During the learning process, the premise parameters in the first layer and the consequent parameters in the fourth layer are tuned until the desired response of the fuzzy inference system achieved. To improve the rate of convergence, the hybrid learning algorithm, which combines the least square method and gradient descent method, is adopted in this study. The least square method is used to optimize the consequent parameters with the premise parameters fixed. Once the optimal consequent parameters are found, the gradient descent method is used to adjust optimally the premise parameters corresponding to the fuzzy sets in input domain. The output of the ANFIS can be written as a linear combination of the consequent parameters:
where p 1, q 1, r 1, p 2, q 2, and r 2 are consequent parameters.
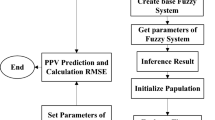
The implementation of the proposed ANFIS approach was carried out using MATLAB R2012b program in this study. The flowchart of hybrid learning procedure of ANFIS is shown in Fig. 3.

Flowchart of hybrid learning procedure of ANFIS (Roy 2005)
4 Case Study
In this study, the following seven factors including the hole depth, burden, spacing, stemming, maximum charge per delay, charge and distance, were taken into account as the input parameters of the ANFIS model, whereas the PPV is the output parameter. The database used in this study was selected from Verma and Singh (2013). The database includes 25 blast vibration records. The first 20 of the total data were used to train the ANFIS model (Table 1), whereas the remaining 5 of the data were used to verify the accuracy and the effectiveness of the trained ANFIS model for prediction of PPV (Table 2).
Different parameter types and their values used for training ANFIS are shown in Table 3. The mean square error (MSE) convergence curve of ANFIS was derived as shown in Fig. 4. From the curve, the final convergence value is 7.8 × 10−6.

Mean square error versus epochs
Due to the limited space, this paper only gives the membership function curves of the input parameter ‘burden’ before and after training, as shown in Fig. 5. Fig 6 shows the results of training and testing of the ANFIS model. The whole training time of ANFIS only needs 0.240511 s in this study.

Membership function curves of the ‘Burden’: a before training; b after training

Results of ANFIS model
A comparison between the forecasted and actual PPV is shown in Table 4. It can be seen that the predictions using the ANFIS model for the PPV had a high success rate (100%). These results indicate that the ANFIS model is a good tool to predict the PPV and worthy of promotion and support.
5 Conclusions
Ground vibration is a simultaneous phenomenon in any blasting operation and it is influenced by many parameters. Some of the pertinent parameters are not clearly understood or the effect of others is difficult to quantify. In this study, an integrated fuzzy neural network model, ANFIS, is developed for the prediction of PPV. To improve the rate of convergence, a hybrid learning algorithm combining the least square method and gradient descent method is adopted in this study. The results show that the ANFIS model is a powerful computational tool that can be used to predict the blast-induced ground vibration.
References
Armaghani DJ, Momeni E, Abad SVANK, Khandelwal M (2015) Feasibility of ANFIS model for prediction of ground vibrations resulting from quarry blasting. Environ Earth Sci 74(4):2845–2860. doi:10.1007/s12665-015-4305-y
Berta G (1994) Blasting induced vibration in tunneling. Tunn Undergr Sp Tech 9(2):175–187. doi:10.1016/0886-7798(94)90029-9
Bhoopal RS, Singh R, Sharma PK (2012) Adaptive neuro-fuzzy inference system for prediction of effective thermal conductivity of polymer-matrix composites. Model Numer Simul Mater Sci 2:43–50. doi:10.4236/mnsms.2012.23005
Ghasemi E, Ataei M, Hashemolhosseini H (2013) Development of a fuzzy model for predicting ground vibration caused by rock blasting in surface mining. J Vib Control 19(5):755–770. doi:10.1177/1077546312437002
Jang JSR (1993) ANFIS: adaptive-network-based fuzzy inference system. IEEE Trans Syst Man Cybern 23(3):665–685. doi:10.1109/21.256541
Khandelwal M, Singh TN (2006) Prediction of blast induced ground vibrations and frequency in opencast mine: a neural network approach. J Sound Vib 289:711–725. doi:10.1016/j.jsv.2005.02.044
Khandelwal M, Singh TN (2007) Evaluation of blast-induced ground vibration predictors. Soil Dyn Earthq Eng 27:116–125. doi:10.1016/j.soildyn.2006.06.004
McKenzie C (1990) Quarry blast monitoring technical and environmental perspective. Quarry Management 17:23–29
Mohammadnejad M, Gholami R, Ramezanzadeh A, Jalali ME (2011) Prediction of blast-induced vibrations in limestone quarries using support vector machine. J Vib Control 18(9):1322–1329. doi:10.1177/1077546311421052
Monjezi M, Ahmadi M, Sheikhan M, Bahrami A, Salimi AR (2010) Predicting blast-induced ground vibration using various types of neural networks. Soil Dyn Earthq Eng 30:1233–1236. doi:10.1016/j.soildyn.2010.05.005
Monjezi M, Hasanipanah M, Khandelwal M (2013) Evaluation and prediction of blast-induced ground vibration at Shur River Dam, Iran, by artificial neural network. Neural Comput Appl 22:1637–1643. doi:10.1007/s00521-012-0856-y
Ni SH, Lu PC, Juang CH (1996) A fuzzy neural network approach to evaluation of slope failure potential. Comput-Aided Civ Inf 11(1):59–66. doi:10.1111/j.1467-8667.1996.tb00309.x
Romo MP, Garcia SR (2003) Neurofuzzy mapping of CPT values into soil dynamic properties. Soil Dyn Earthq Eng 23(6):473–482. doi:10.1016/S0267-7261(03)00066-6
Roy SS (2005) Design of adaptive neuro-fuzzy inference system for predicting surface roughness in turning operation. J Sci Ind Res 64:653–659
Shahin MA, Maier HR, Jaksa MB (2003) Settlement prediction of shallow foundations on granular soils using B-spline neurofuzzy models. Comput Geotech 30(8):637–647. doi:10.1016/j.compgeo.2003.09.004
Singh PK, Roy MP (2008) Damage to surface structures due to underground coal mine blasting: apprehension or real cause? Environ Geol 53:1201–1211. doi:10.1007/s00254-007-0709-7
Singh PK, Roy MP (2010) Damage to surface structures due to blast vibration. Int J Rock Mech Min 47:949–961. doi:10.1016/j.ijrmms.2010.06.010
Singh TN, Singh V (2005) An intelligent approach to prediction and control ground vibration in mines. Geotech Geol Eng 23:249–262. doi:10.1007/s10706-004-7068-x
Takagi T, Sugeno M (1985) Fuzzy identification of systems and its applications to modeling and control. IEEE Trans Syst Man Cybern 15(1):116–131. doi:10.1016/B978-1-4832-1450-4.50045-6
Venkatesh HS (2005) Influence of total charge in a blast on the intensity of ground vibrations-field experiment and computer simulation. Fragblast 9(3):27–388. doi:10.1080/13855140500332260
Verma AK, Singh TN (2013) Comparative study of cognitive systems for ground vibration measurements. Neural Comput and Applic 22(Suppl 1):341–350. doi:10.1007/s00521-012-0845-1
Zadeh LA (1965) Fuzzy sets. Inf Control 8:338–353
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Xue, X., Yang, X. & Li, P. Evaluation of Ground Vibration Due to Blasting Using Fuzzy Logic. Geotech Geol Eng 35, 1231–1237 (2017). https://doi.org/10.1007/s10706-017-0162-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10706-017-0162-7