
Abstract
This paper studies surface waves called Bleustein–Gulyaev (BG) waves in piezoelectricity. They propagate along the surface of a homogeneous piezoelectric half-space whose constituent material has \(C_{6}\) hexagonal symmetry, where the surface is subject to the mechanically-free and electrically-closed condition. We revisit the Barnett–Lothe integral formalism for general piezoelectricity and give straightforward proofs, which only use the positive definiteness of the elasticity tensor and of the dielectric tensor, to derive fundamental properties of the Barnett–Lothe tensors. This leads us to obtain a criterion for the existence of subsonic surface waves. Moreover, when the waves propagate in the direction of the 1-axis along the surface of the piezoelectric half-space \(x_{2}\le0\) of \(C_{6}\) hexagonal symmetry whose 6-fold axis of rotational symmetry coincides with the 3-axis, we compute explicitly the phase velocity of the BG waves and investigate its perturbation, i.e., the shift in the velocity due to a perturbation of the material constants which need not have any symmetry.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In many engineering devices, piezoelectric materials have been used because of their intrinsic direct and converse piezoelectric effects which take place between mechanical deformations and electric fields [1–3]. In piezoelectricity, the mechanical stress and the electric displacement are related to the mechanical displacement and the electric potential through the elasticity tensor, the piezoelectric tensor and the dielectric tensor, and it is the piezoelectric tensor through which the elastic and electric fields are coupled with each other.
Suppose that a half-space in the 3D Euclidean space is occupied by a homogeneous piezoelectric medium with \(C_{6}\) hexagonal symmetry whose 6-fold axis of rotational symmetry lies on the surface of the half-space, and suppose that the surface is subject to the mechanically-free and electrically-closed boundary condition. It then follows that surface waves called Bleustein–Gulyaev (BG) waves propagate along the surface in the direction perpendicular to the axis of symmetry [4, 5].
For general piezoelectricity, without assuming any material symmetry, Lothe and Barnett established the integral formalism for piezoelectricity [6, 7] on the basis of the Stroh formalism and their own integral formalism for anisotropic elasticity (see, e.g., [8–12]). They developed a systematic approach to study the existence of subsonic surface waves which propagate along the surface of a piezoelectric half-space under several specific boundary conditions. We put our footing on their formalism to study subsonic surface waves and their perturbation.
The key to Lothe and Barnett’s study is to analyze the properties of the Barnett–Lothe tensors. They used the relation between the Lagrangian and the kinetic energy to prove several important properties of the Barnett–Lothe tensors. They mentioned at the beginning of Sect. 3 of [6], “Their properties should be deducible from the integral expressions combined with …the positive definiteness of the material constants. However, such a direct analysis is difficult, …”.
In this paper, we will prove those properties by a direct analysis (i.e. a straightforward approach mentioned in the Abstract) which uses only the positive definiteness of the elasticity tensor and that of the dielectric tensor, without appealing to the Lagrangian theory as Lothe and Barnett did in [6, 7]. To the best of our knowledge, there seems to be no literature that discusses the direct analysis for surface waves in piezoelectricity as we will do in this paper.
As an advantage of our direct analysis, we notice a specific condition on the piezoelectric tensor which guarantees the positive definiteness of the derivative of one of the Barnett–Lothe tensors, namely \(\widetilde{\mathbf{S}}_{3}\), with respect to the increasing velocity. This condition justifies the unique existence of the BG waves. In fact, their phase velocity is obtained as the vanishing point of the eigenvalues of the real symmetric matrix \(\widetilde{\mathbf{S}}_{3}\) along the increasing velocity and the positive definiteness of the derivative of \(\widetilde{\mathbf{S}}_{3}\) proves the monotonicity of the eigenvalues of \(\widetilde{\mathbf{S}}_{3}\). However, that condition seems to have been missed for a long time.
This condition guarantees not only the unique existence of the BG waves but also their stability. In fact, we give a fully anisotropic perturbation to the piezoelectric half-space of \(C_{6}\) hexagonal symmetry, i.e., to the elasticity tensor, the piezoelectric tensor and the dielectric tensor, each of which has \(C_{6}\) hexagonal symmetry. We do not assume any material symmetry of the perturbation, i.e., the perturbative parts of the elasticity tensor, the piezoelectric tensor and the dielectric tensor need not have any material symmetry. We then derive a first-order perturbation formula for the phase velocity of the BG waves, which expresses the shift in the velocity due to the perturbation given to the material constants. We see that even when a perturbation, which is small, is added to the material constants of a piezoelectric half-space of \(C_{6}\) hexagonal symmetry, BG waves stably exist. This is guaranteed by the aforementioned properties of \(\widetilde{\mathbf{S}}_{3}\). Thus, it is only after the properties of \(\widetilde{\mathbf{S}}_{3}\) have been established that we are able to consider the first-order perturbation of the phase velocity, whose formula itself has been reported in the conference proceedings [13] without full proof.
The piezoelectric tensor is an important indicator of a material’s suitability for recent applications in piezotronics and piezo-photonics [14]. There are several successful methods to measure the piezoelectric constants (i.e., the components of the piezoelectric tensor), such as the frequency method, the laser interferometry method and the quasi-static method [15]. The first method (the frequency method) depends on the accurate reading of the resonance frequencies and can be used to measure and calculate all the material constants of a piezoelectric medium. The second and third methods (the laser interferometry method and the quasi-static method) have been rather used to check the results obtained from the frequency method, but they focus on identifying parts of the piezoelectric constants (transverse and longitudinal parts), and they do not suggest how to measure the remaining constants (shear part). Mathematically, Kaltenbacher et al. [16] proposed a PDE based method to determine all piezoelectric tensors by utilizing boundary observation. The formulas presented in this paper directly reveal the relationship between velocity and the piezoelectric constants, which are related to the shear part and hence they may be utilized to establish the measurement of the shear part of the piezoelectric constants.
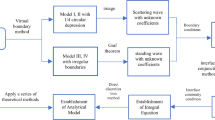
As an application of our first-order perturbation formula to an inverse problem, we may consider the problem of identifying the axis of symmetry of a \(C_{6}\) hexagonal piezoelectric material [17, 18]. Originally, BG waves propagate along a surface of a \(C_{6}\) hexagonal piezoelectric half-space on which the symmetry axis lies, and the propagation direction of them is perpendicular to the symmetry axis (see Fig. 1 at the beginning of Sect. 2.2). As far as determining the symmetry axis of the \(C_{6}\) hexagonal piezoelectric material, it should be possible to know the symmetry axis roughly from the shape of the crystal. However, in order to ascertain the symmetry axis accurately, we believe that using BG waves should be useful and convenient. An evidence for the usefulness can be shown by their local stability on the propagation direction as follows. Let us rotate the propagation direction of the BG waves slightly on the surface from its original direction, i.e., from the direction perpendicular to the symmetry axis, by the angle \(\varphi\) around the normal axis to the surface. We can then use our first-order perturbation formula to show that \(\varphi=0\), which corresponds to the original propagation direction perpendicular to the symmetry axis, becomes a local and isolated stationary point of the phase velocity of the BG waves when regarding it as a function of \(\varphi\). This assertion will be discussed in Remark 5.4, whereas it implies a possibility of determining the axis of \(C_{6}\) hexagonal symmetry from measurements of phase velocity of BG waves which propagate along the surface on which we already know that the axis of symmetry is lying.

Bleustein–Gulyaev (BG) waves in a \(C_{6}\) hexagonal piezoelectric half-space. The figure pertains to the case \({\mathbf{m}} = (1,0,0)\) and \({\mathbf{n}} = (0,1,0)\)
The rest of the paper is organized as follows. In Sect. 2 we briefly summarize some basics in piezoelectricity (Sect. 2.1), define \(C_{6}\) hexagonal symmetry of a piezoelectric medium and introduce BG waves which propagate along the piezoelectric half-space (Sect. 2.2). In Sect. 3 we give brief accounts of the Stroh formalism and the Barnett–Lothe integral formalism for piezoelectricity, and present straightforward proofs for the properties of the Barnett–Lothe tensors in piezoelectricity, where we have used only the positive definiteness of the elasticity and dielectric tensors without assuming any material symmetry. In Sect. 4, on the basis of the Barnett–Lothe integral formalism for piezoelectricity, we recover a formula for the phase velocity of BG waves under the setting that the waves propagate in the direction of the 1-axis along the surface of the piezoelectric half-space \(x_{2}\le0\) of \(C_{6}\) hexagonal symmetry whose 6-fold axis of rotational symmetry coincides with the 3-axis. In Sect. 5 we add a fully anisotropic perturbation to the piezoelectric half-space of \(C_{6}\) hexagonal symmetry and investigate the phase velocity of BG waves under the perturbation. We then present a perturbation formula for the velocity which is correct to within terms linear in the perturbation given to the material constants. Putting the formula obtained in Sect. 4 as the unperturbed state of the phase velocity, we give a complete proof for the first-order perturbation formula.
2 Basic Piezoelectricity and Bleustein–Gulyaev (BG) Waves
2.1 Basic Theory
In piezoelectricity, under the Cartesian coordinate system \({\mathbf{x}}=(x_{1}, x_{2}, x_{3})\) the mechanical stress tensor \(\boldsymbol{\sigma}=( \sigma_{ij})_{i,j=1,2,3}\) and the electric displacement \(\boldsymbol{D}=(D_{1},D_{2},D_{3})\) are related to the mechanical displacement \(\boldsymbol{u}=(u_{1}, u_{2}, u_{3})\) and the electric potential \(\phi\) by the following constitutive equations [1–3]:
Here \({\mathbf{C}}=(C_{\mathit{ijkl}})_{i,j,k,l=1,2,3}\) is the elasticity tensor, \(\boldsymbol{e}=( e_{\mathit{ijl}})_{i,j,l=1,2,3}\) is the piezoelectric tensor, and \(\boldsymbol{\varepsilon}=( \varepsilon_{\mathit {jl}})_{i,l=1,2,3}\) is the dielectric tensor, and these tensors satisfy the following symmetry conditions:
We assume that the piezoelectric medium is homogeneous, which means that \({\mathbf{C}}\), \(\boldsymbol{e}\), and \(\boldsymbol{\varepsilon}\) are independent of \({\mathbf{x}}\), and assume that \({\mathbf{C}}\) and \(\boldsymbol{\varepsilon}\) satisfy the positive definiteness conditions
for any non-zero \(3\times3\) real symmetric matrix \((s_{ij})\) and for any non-zero real vector \((E_{1},E_{2},E_{3}) \in\mathbb{R}^{3}\).
The equations of mechanical motion with zero body force and the equation of electric equilibrium with zero free charge are given by
respectively, where \(\rho\) is the uniform density and \(t\) is the time. By substituting (2.1) into (2.3), we obtain a system of four equations for the unknowns \(\boldsymbol{u}=(u_{1}, u_{2}, u_{3})\) and \(\phi\).
Let ℝ and ℂ denote the set of real and complex numbers, respectively, and let \({\mathbf{m}}=(m_{1}, m_{2}, m_{3})\) and \({\mathbf{n}}=(n_{1}, n_{2}, n_{3}) \) be orthogonal unit vectors in \(\mathbb{R}^{3}\). We consider surface waves in the piezoelectric half-space \({\mathbf{n}}\cdot{\mathbf{x}}=n_{1}x_{1}+n_{2}x_{2}+n_{3}x_{3}\le 0\) which propagate along the surface \({\mathbf{n}} \cdot{\mathbf{x}} = 0\) in the direction of \({\mathbf{m}}\) and decay exponentially as \({\mathbf{n}}\cdot{\mathbf{x}} \longrightarrow-\infty\). The general form of the solutions to (2.3) which describe such surface waves is written as
in \({\mathbf{n}}\cdot{\mathbf{x}}\le0\), where \(i=\sqrt{-1}\) and k is the wave number. The vectors \({\mathbf{a}}_{\alpha}\in\mathbb{C}^{4}\) and the scalars \(p_{\alpha}\in\mathbb{C}\ (1\leq{\alpha}\leq4)\) with \(\mbox{Im}\, p_{\alpha}\) (the imaginary part of \(p_{\alpha}\)) \(>0\) are obtained in terms of the phase velocity \(v\) by substituting (2.4) into (2.1) and (2.3), after which \(v\) and the coefficients \(c_{\alpha}\in\mathbb{C}\ (1\leq{\alpha}\leq4)\) are determined from boundary condition (2.5) at \({\mathbf{n}} \cdot{\mathbf{x}} = 0\). For the details, see Sect. 3.
The limiting velocity \(v_{\mathrm{L}}=v_{\mathrm{L}}({\mathbf{m}}, {\mathbf{n}})\) is the lowest velocity of body wave propagating along some direction in the \({\mathbf{m}}\)-\({\mathbf{n}}\) plane. The interval \(0< v< v_{\mathrm {L}}\) is called the subsonic range. Later in Sect. 3 we give a precise definition of \(v_{\mathrm{L}}\). Throughout this paper, we consider surface waves with velocities in the subsonic range, which we call subsonic surface waves.
We impose the “mechanically-free and electrically-closed condition” at \({\mathbf{n}} \cdot{\mathbf{x}} = 0\), i.e., the traction-free surface \({\mathbf{n}} \cdot{\mathbf{x}} = 0\) of the piezoelectric half-space \({\mathbf{n}} \cdot{\mathbf{x}} \le0\) is connected with a grounded electrode, which means that the mechanical traction and the electric potential vanish at the boundary, namely,
Lothe and Barnett give the following assertion in (4.36) of [6].
Proposition 2.1
Let \({\mathbf{m}}\) and \({\mathbf{n}}\) be orthogonal unit vectors in \(\mathbb{R}^{3}\). There are at most two subsonic surface waves that satisfy the condition (2.5) at the boundary.
We will refer to this assertion at the end of Sect. 3.
Now we introduce the contracted notation called the Voigt notation. For \(C_{\mathit{ijkl}}\in{\mathbf{C}}\) we use the rules of replacing the subscript \(ij\) (or \(kl\)) by \(\alpha\) (or \(\beta\)) as follows:
In a similar way, we replace the subscript \(ij\) (the first two indices) of \(e_{\mathit{ijl}}\in\boldsymbol{e}\) by \(\alpha\). We then define the elasto-piezo-dielectric matrix \({\mathrm{P}}\) to be a \(9\times9\) symmetric matrix whose upper left hand \(6\times6\) block denotes the components of \({\mathbf{C}}=(C_{\alpha\beta})_{\alpha,\beta=1,2,\ldots, 6}\) under the Voigt notation, whose upper right hand \(6\times3\) block denotes the components of \(\boldsymbol{e}=(e_{\alpha l})_{\alpha=1,2,\ldots, 6, l=1,2,3}\) under the Voigt notation, and the lower right hand \(3\times3\) block denotes the components of \(\boldsymbol{\varepsilon}=(\varepsilon_{\mathit{jl}} )_{j,l=1,2,3}\) (cf. [2]):
where the superscript \(T\) denotes transposition.
2.2 Bleustein–Gulyaev (BG) Waves
Suppose that the piezoelectric material which constitutes a half-space in \(\mathbb{R}^{3}\) has \(C_{6}\) hexagonal symmetry, which means that the material has one 6-fold symmetry axis, i.e., a symmetry axis of the rotation of degree \(2\pi/6\). Let this 6-fold axis lie on the surface of the piezoelectric half-space. Then surface waves called the Bleustein–Gulyaev (BG) waves [4, 5] propagate in the direction perpendicular to the 6-fold axis along the surface under the mechanically-free and electrically-closed condition (see Fig. 1).
Let the 6-fold axis of the \(C_{6}\) hexagonal piezoelectric material coincide with the 3-axis (i.e., the \(x_{3}\)-axis). The possibly non-zero components of \({\mathbf{C}}\), \(\boldsymbol{e}\) and \(\boldsymbol{\varepsilon}\) are
and those components satisfy
The elasto-piezo-dielectric matrix is then written as
where we have put
We note that the positive definiteness conditions (2.2) are equivalent to
We call the component \(e_{23}\) in (2.7) the transverse part, \(e_{33}\) the longitudinal part and \(e_{41}\), \(e_{42}\) the shear part of the piezoelectric constants. Let us take \({\mathbf{m}}=(1,0,0)\) and \({\mathbf{n}}=(0,1,0)\). Then we have the following theorem.
Theorem 2.2
Suppose that \(e_{42}\ne0\). There exist surface waves called Bleustein–Gulyaev (BG) waves which propagate along the surface \(x_{2}=0\) of the piezoelectric half-space \(x_{2}\le0\) in the direction of the 1-axis (i.e., the \(x_{1}\)-axis) and satisfy the mechanically-free and electrically-closed condition (2.5) with \({\mathbf{n}}=(0,1,0)\) (cf. Fig. 1). Their phase velocity \(v=v_{{\mathrm{BG}}}^{\mathrm{hex}}\) is given by
The surface-wave solution (2.4) pertaining to the BG waves above is written as
where \(c\) is an arbitrary constant and \(\gamma= \frac{{e_{42}}^{2}/{\varepsilon_{22}}}{L+{e_{42}}^{ 2}/{\varepsilon_{22}}} \).
Remark 2.3
(1) Bleustein [4] and Gulyaev [5] independently derived the velocity formula (2.9) and constructed the surface-wave solution (2.10) under the assumption that the medium which constitutes the piezoelectric half-space has \(C_{6v}\) hexagonal symmetry, whose elasto-piezo-dielectric matrix has the same form as (2.7), except that the component \(e_{41}=0\). It can be observed by simple computations that the theorem holds regardless of whether \(e_{41}= 0\) or not, i.e., it holds under the assumption that the medium has \(C_{6}\) hexagonal symmetry.
(2) A transversely isotropic medium in piezoelectricity whose axis of rotational symmetry is parallel to the 6-fold axis of the piezoelectric medium of \(C_{6}\) hexagonal symmetry has exactly the same form of elasto-piezo-dielectric matrix (2.7) when the symmetry axis is taken to be the 3-axis (cf. [19]). Hence the theorem applies to the BG waves which propagate along the surface of the half-space \(x_{2}\le0\) in the direction of the 1-axis of such a transversely isotropic medium.
(3) There exists another type of surface waves which propagate along the surface \(x_{2}=0\) of the piezoelectric half-space \(x_{2}\le0\) in the direction of the 1-axis (\({\mathbf{m}}=(1,0,0)\), \({\mathbf {n}}=(0,1,0)\)) and satisfy (2.5), and whose properties are determined only from the elasticity tensor \({\mathbf{C}}\) and are independent of the piezoelectric tensor \(\boldsymbol{e}\) and the dielectric tensor \(\boldsymbol{\varepsilon}\). We call such waves the Rayleigh-type waves. In fact, their surface-wave solution (2.4) has the third and fourth components being zero i.e., \(u_{3}=0\) and \(\phi=0\), and the first component \(u_{1}\) and the second component \(u_{2}\) agree, respectively, with the longitudinal and the normal components of the displacement of Rayleigh waves in a transversely isotropic medium in elasticity which propagate along the surface on which the axis of rotational symmetry lies and propagate in the direction perpendicular to the symmetry axis (cf. [9–12, 20]). We denote the phase velocity of the Rayleigh-type waves by \(v_{\mathrm{R}}^{\mathrm{hex}}\) and will comment on it in the paragraph which includes formula (4.9).
(4) By Proposition 2.1, there exist no subsonic surface waves other than the BG waves in the theorem and the Rayleigh-type waves in (3), provided that both of them are subsonic. The condition that they are subsonic is given in the assumption of Theorem 5.1. Henceforth, we consider subsonic surface waves throughout the paper.
(5) When \(e_{42}\) tends to zero, it follows that \(V_{{\mathrm{BG}}}^{\mathrm{hex}}\) tends to \(L\) and \(\gamma\) tends to 0. Hence (2.10) implies that BG waves degenerate into the plane waves of the velocity \(\sqrt{L/\rho}\) when \(e_{42}=0\).
Remark 2.4
As it can be observed from the solution (2.10), BG waves have noteworthy properties that their mechanical displacement is polarized in the direction normal to the plane which contains both the direction of propagation and the direction of the normal to the surface on which the BG waves propagate. This is a reason that BG waves are also called piezoelectric shear-horizontal (SH) surface waves. Since Bleustein [4] and Gulyaev [5] discovered BG waves for a piezoelectric medium of \(C_{6v}\) symmetry, a number of authors have studied surface waves of SH modes which propagate in piezoelectric materials of various material symmetries under suitable choices of the cut plane in a crystal, the propagation direction and the boundary condition at the surface (see [21, 22] and the references therein). For instance, given a piezoelectric half-space \(x_{2}\le0\) which has \(C_{2}\) monoclinic symmetry with its 2-fold axis parallel to the 3-axis, consider the solution (2.4) pertaining to the surface waves which propagate along the surface \(x_{2}= 0\) in the direction of the 1-axis (\({\mathbf{m}}=(1,0,0)\), \({\mathbf {n}}=(0,1,0)\)). It then follows that the system for each of the vectors \({\mathbf{a}}_{\alpha}\in\mathbb{C}^{4}\ (1\leq{\alpha}\leq4)\) in (2.4) is decoupled into two independent subsystems of the equations. One is the system for the first two components of \({\mathbf{a}}_{\alpha}\) that pertain to the longitudinal and the normal components of the mechanical displacement and the other is the system for the last two components of \({\mathbf{a}}_{\alpha}\) that pertain to the shear horizontal component of the mechanical displacement and the electric potential, which implies the possibility of the existence of surface waves of SH modes (see, for example, [23] and Sect. 5.1 of [24]).
In the present paper, we do not pursue the studies on piezoelectric surface waves of SH modes, but we consider how BG waves are perturbed from their original state when we give a fully anisotropic perturbation to the material constants of \(C_{6}\) hexagonal symmetry. For this purpose we will first observe that the perturbed BG waves stably exist. The mechanical displacement of the perturbed BG waves no longer retains the properties of SH modes, but we are especially interested in analyzing how the phase velocity of BG waves deviates from its comparative unperturbed value as caused by a perturbation of no material symmetry, which will be later denoted by \({\mathrm{P}}_{\mathrm{ptb}}\) in (5.1). Thus, regarding formula (2.9) as the unperturbed value of the phase velocity, we will investigate the first-order perturbation of the phase velocity of BG waves. Before doing that, we need to establish several important properties of the Barnett and Lothe tensors in their integral formalism in order to guarantee the unique existence and the stability of the perturbed BG waves, to which we will proceed.
3 Stroh’s Eigenvalue Problem and Integral Formalism
Let us turn to the setting of Sect. 2.1, where we have taken the orthogonal unit vectors \({\mathbf{m}}=(m_{1}, m_{2}, m_{3})\) and \({\mathbf{n}}=(n_{1}, n_{2}, n_{3}) \) in \(\mathbb{R}^{3}\) so that \({\mathbf{n}}\) is the normal to the surface of the piezoelectric half-space \({\mathbf{n}}\cdot{\mathbf{x}}\le0\) along which the surface waves propagate in the direction of \({\mathbf{m}}\). We assume that the elasto-piezo-dielectric matrix \(P\) of the piezoelectric half-space in question has the form (2.6), i.e., we do not assume any material symmetry. In this section we give a brief sketch of the Barnett–Lothe integral formalism for piezoelectricity [6, 7] and review several important propositions given there. To begin with, define the \(4\times4\) real matrices \({\mathbf{Q}}\), \({\mathbf{R}}\), and \({\mathbf{T}}\) written blockwise as follows:
where \((M_{ik})_{i\downarrow k\rightarrow1,2,3}\) denotes a \(3\times3\) matrix whose \((i,k)\) component is \(M_{ik}\), \((v_{i})_{i\downarrow1,2,3}\) a three-dimensional column vector whose \(i\)-th component is \(v_{i}\), \((w_{k})_{k\rightarrow1,2,3}\) a three-dimensional row vector whose \(k\)-th component is \(w_{k}\), \({\mathbf{I}}_{3}\) the \(3\times3\) identity matrix, and each \((4,4)\) block component of \({\mathbf{Q}}\), \({\mathbf{R}}\), and \({\mathbf{T}}\) is a scalar.
We substitute (2.4) into (2.1) and the resulting formulas into (2.3) to observe that \(p=p_{\alpha} \ (1\leq{\alpha}\leq4)\) are the solutions to the eighth-order equation
with positive imaginary parts, and that each of \({\mathbf{a}}_{\alpha}\in\mathbb{C}^{4}\ (1\leq{\alpha}\leq4)\) is a non-trivial solution to the four-dimensional linear system
Substituting (2.4) into (2.1), we can compute the vectors \({\mathbf{l}}_{\alpha}\in\mathbb{C}^{4}\ (1\leq{\alpha}\leq4)\) so that
where
The relations (3.3) and (3.5) can be recast as Stroh’s eight-dimensional eigenvalue problem:
where N is a \(8\times8\) matrix defined by
and \(\left( \begin{array}{c} {\mathbf{a}}_{\alpha} \\ {\mathbf{l}}_{\alpha} \end{array} \right)\ (1\leq{\alpha}\leq4)\) are the column vectors in \(\mathbb{C}^{8}\) whose first four components consist of \({\mathbf{a}}_{\alpha}\) in (2.4) (or, in (3.3)) and whose last four components consist of \({\mathbf{l}}_{\alpha}\) in (3.4).
Now let \(\widetilde{\mathbf{m}}=(\widetilde{m}_{1}, \widetilde{m}_{2}, \widetilde{m}_{3} )\) and \(\widetilde{\mathbf{n}}=(\widetilde{n}_{1} , \widetilde{n}_{2} , \widetilde{n}_{3} )\) be orthogonal unit vectors in \(\mathbb{R}^{3}\) which are obtained by rotating the orthogonal unit vectors \({\mathbf{m}}\) and \({\mathbf{n}}\) around their vector product \({\mathbf{m}}\times {\mathbf{n}}\) by an angle \(\theta\ (-\pi\le\theta< \pi)\) so that
Also, let \({\mathbf{Q}}(\theta)\), \({\mathbf{R}}(\theta)\), and \({\mathbf{T}}(\theta)\) be the \(4\times4\) real matrices written blockwise as follows:
Note that \({\mathbf{Q}}(0)\), \({\mathbf{R}}(0)\) and \({\mathbf{T}}(0)\) are equal to \({\mathbf{Q}}\), \({\mathbf{R}}\), and \({\mathbf{T}}\) in (3.1), respectively. Further, matrices \({\mathbf{Q}}(\theta)\) and \({\mathbf{T}}(\theta)\) are symmetric for all \(\theta\).
The limiting velocity \(v_{\mathrm{L}}=v_{\mathrm{L}}({\mathbf{m}},{\mathbf{n}})\) is the lowest velocity for which the matrix \({\mathbf{T}}(\theta)\) becomes singular for some angle \(\theta\):
By the positive definiteness conditions (2.2), the solutions \(p_{\alpha}\) to (3.2), i.e., the eigenvalues of \({\mathbf{N}}\), are not real when \(v\) is included in the subsonic range \(0\le v< v_{\mathrm{L}}\), and they occur in complex conjugate pairs. Hence we have taken \(\mbox{Im}\, p_{\alpha}>0\) for \(1\leq{\alpha}\leq4\) so that the solutions (2.4) are bounded in the half-space \({\mathbf{n}} \cdot{\mathbf{x}}\le0\).
When the eigenvalue problem (3.6) is degenerate and generalized eigenvectors must be introduced, the solutions (2.4) and the formulas (3.3) and (3.5) have to be slightly modified.Footnote 1 In that case, however, we can arrive at “the angle-averaged Stroh’s eigenvalue problem” which is valid not only when \({\mathbf{N}}(0)\) has eigenvectors but also when \({\mathbf{N}}(0)\) has generalized eigenvectors, to which we now proceed.
Like (3.7), we define a \(8\times8\) matrix \({\mathbf{N}}(\theta)\) by
for \(0\le v< v_{\mathrm{L}}\). Then \({\mathbf{N}}(0)\) is equal to \({\mathbf{N}}\) of (3.7). For \(0\le v< v_{\mathrm{L}}\), we define the \(4\times4\) real matrices \({\mathbf{S}}_{i}={\mathbf{S}}_{i}(v)\ (i=1,2,3)\) to be the angular averages of the \(4\times4\) blocks of the matrix \({\mathbf{N}}(\theta)\) over \([-\pi, \pi]\):
namely,
(Note. Matrices \({\mathbf{S}}_{1}\), \({\mathbf{S}}_{2}\) and \({\mathbf {S}}_{3}\) correspond to the matrices \({\mathbf{S}}\), \(-{\mathbf{Q}}\) and \(-{\mathbf{B}}\) in [6] and to the matrices \({\mathbf {S}}_{\Phi}\), \(-{\mathbf{Q}}_{\Phi}\) and \(-{\mathbf{B}}_{\Phi}\) in [7], respectively. We follow the notation in [10].)
The following assertion is a fundamental theorem in the Barnett–Lothe integral formalism of Stroh’s eigenvalue problem (cf. [8–12, 20] for elasticity and [6, 7] for piezoelectricity).
Theorem 3.1
For \(0\le v< v_{\mathrm{L}}\), let \(\left( \begin{array}{c} {\mathbf{a}}_{\alpha} \\ {\mathbf{l}}_{\alpha} \end{array} \right)\) be an eigenvector or a generalized eigenvector of \({\mathbf{N}}(0)\) corresponding to the eigenvalues \(p_{\alpha}\ (\alpha=1,2,3,4)\) with \(\mathrm{{Im}}\,p_{\alpha }>0\). Then for \(0\le v< v_{\mathrm{L}}\),
where \(i=\sqrt{-1}\).
Henceforth, we take \(\left( \begin{array}{c} {\mathbf{a}}_{\alpha} \\ {\mathbf{l}}_{\alpha} \end{array} \right)\in\mathbb{C}^{8}\ (1\leq{\alpha}\leq4)\) to be linearly independent eigenvector(s) or generalized eigenvector(s) of \({\mathbf{N}}(0)\) associated with the eigenvalues \(p_{\alpha}\ (1\leq{\alpha}\leq4, \mbox{Im}\,p_{\alpha}>0)\).
Let us denote by \(v_{\mathrm{S}}\) the phase velocity of the subsonic surface waves in the half-space \({\mathbf{n}}\cdot{\mathbf{x}} \le0\) which propagate along the surface \({\mathbf{n}}\cdot{\mathbf{x}}=0\) in the direction of \({\mathbf{m}}\) and satisfy the mechanically-free and electrically-closed boundary condition (2.5) at \({\mathbf{n}}\cdot{\mathbf{x}}=0\). The condition (2.5), combined with (2.4) and (3.4), implies that there exists a nontrivial set of \(c_{\alpha}\in\mathbb{C}\ (1\leq{\alpha}\leq4)\) so that
where \(({\mathbf{v}})_{i}\) denotes the i-th component of a vector \({\mathbf{v}}\in\mathbb{C}^{4}\).
To incorporate (3.15) with the eigenrelation (3.14), we follow the integral formalism developed by Lothe and Barnett [6, 7]. Formula (3.14) is rewritten equivalently as
Here the \(8\times8\) matrix \(\left( \begin{array}{c@{\quad}c} \widetilde{\mathbf{S}}_{1} & \widetilde{\mathbf{S}}_{2} \\ [0.5mm] \widetilde{\mathbf{S}}_{3} & {\widetilde{\mathbf{S}}_{1}}^{T} \end{array} \right) \) is obtained from the \(8\times8\) matrix \(\left( \begin{array}{c@{\quad}c} {\mathbf{S}}_{1} & {\mathbf{S}}_{2} \\ [0.5mm] {\mathbf{S}}_{3} & {\mathbf{S}}_{1}^{T} \end{array} \right)\) in (3.14) by first interchanging the 4th row and the 8th row and then by interchanging the 4th column and the 8th column, which allows us to write the new \(4\times4\) blocks \(\widetilde{\mathbf{S}}_{i}=\widetilde{\mathbf{S}}_{i}(v)\ (i=1,2,3)\) as
and
where each subblock of \(\widetilde{\mathbf{S}}_{i}\ (i=1,2,3)\) on the right hand sides of (3.17) and (3.18) denotes a \(3\times3\) submatrix or a three-dimensional column vector or a row vector or a scalar which consists of the \((i,k)\) component of the parenthesized matrix with \(i\) and \(k\) moving through the range described therein, whereas we have put
The relation (3.15) is then rewritten as
We will prove fundamental properties of \(\widetilde{\mathbf{S}}_{i}=\widetilde{\mathbf{S}}_{i}(v)\ (i=2,3)\).
Proposition 3.2
For \(0\le v< v_{\mathrm{L}}\), the \(4\times4\) real symmetric matrix \(\widetilde{\mathbf{S}}_{2}\) is positive definite.Footnote 2
Proof
Let us write \({\mathbf{T}}(\theta)\) in (3.9) in block notation as
where
The second condition in (2.2) gives \(t_{\varepsilon}>0\). The definition (3.10) of the limiting velocity \(v_{\mathrm{L}}\) implies that when \(0\le v< v_{\mathrm{L}}\), \({\mathbf{T}}(\theta)\) is invertible for all \(\theta\). Hence we write its inverse in block notation as
where \({\mathbf{S}}={\mathbf{S}}(\theta)\) is a \(3\times3\) real symmetric matrix, \(\boldsymbol{s}=\boldsymbol{s}(\theta)\) is a column vector in \(\mathbb{R}^{3}\) and \(s=s(\theta)\) is a scalar. To write them in terms of the block components of \({\mathbf{T}}(\theta)\) in (3.21), we need the following lemma.
Lemma 3.3
Let \(0\le v< v_{\mathrm{L}}\). We have
and
Moreover, \({\mathbf{S}}\) is positive definite for all \(\theta \).Footnote 3
Proof of Lemma
The properties of the determinant under matrix transformation imply that
which proves (3.24). By (3.21) and (3.23), the blockwise computation of \({\mathbf{T}}(\theta)^{-1} {\mathbf{T}}(\theta) ={\mathbf {I}}_{4}\), where \({\mathbf{I}}_{4}\) is the \(4\times4\) identity, leads us to
The second and third equations of (3.25) follow from those of (3.26), respectively. Substitution of the second equation of (3.25) into the first equation of (3.26) implies that
which gives the first equation of (3.25).
When \(v=0\), the condition of positive definiteness for C (cf. (2.2)) implies that \({\mathbf{T}}_{C}\) is positive definite for all \(\theta\), and so is \({\mathbf{T}}_{C}+\boldsymbol{t}_{e} \, \boldsymbol{t}_{e}^{T}/t_{\varepsilon}\) for all \(\theta\). Thus, at \(v=0\) all the eigenvalues of \({\mathbf{T}}_{C}+\boldsymbol{t}_{e} \, \boldsymbol{t}_{e}^{T}/t_{\varepsilon}\) are positive for all \(\theta\). As \(v\) increases from zero, suppose that there exists a velocity \(v_{0}\ (0< v_{0}< v_{\mathrm{L}})\) at which an eigenvalue of \({\mathbf{T}}_{C}+\boldsymbol{t}_{e} \, \boldsymbol{t}_{e}^{T}/t_{\varepsilon}\) vanishes for some \(\theta\). Then by (3.24), \(\det{\mathbf{T}}(\theta )\) vanishes at that \(\theta\), which contradicts the definition (3.10). Hence, throughout \(0< v<v_{\mathrm{L}}\) the eigenvalues of \({\mathbf{T}}_{C}+\boldsymbol{t}_{e} \, \boldsymbol{t}_{e}^{T}/t_{\varepsilon}\) remain to be positive for all \(\theta\), so do the eigenvalues of its inverse \({\mathbf{S}}\) for all \(\theta\). This proves the lemma. □
We continue the proof of the proposition. Likewise, we write \({\mathbf{Q}}(\theta)\) and \({\mathbf{R}}(\theta)\) in (3.9) as
where
It follows from (3.13), (3.23) and (3.27) that the integrands of the subblocks of \(\widetilde{\mathbf{S}}_{2}\) in (3.17), i.e., the integrands of \(({\mathbf{S}}_{2})_{{\scriptstyle i\downarrow1,2,3\atop\scriptstyle k\rightarrow1,2,3}}\), \(({\mathbf{S}}_{1})_{{\scriptstyle i\downarrow1,2,3\atop\scriptstyle k=4}}\) and of \(({\mathbf{S}}_{3})_{{\scriptstyle i=4\atop\scriptstyle k=4}}\), are written as
and
for \(0\le v< v_{\mathrm{L}}\), respectively. Put the right hand sides of the equations above as
Then \(\widetilde{\mathbf{S}}_{2}\) can be expressed as
We observe that the integrand can be decomposed as
where
Let us compute \(c-\boldsymbol{b}^{T}\, {\mathbf{S}}^{-1}\, \boldsymbol{b}\), the \((4,4)\) component of the matrix \({\mathbf{M}}\). It follows from (3.29) that
and from the second and the third equations of (3.25) that
The Cauchy–Schwarz inequality in the space \(\mathbb{R}^{3}\) with the inner product \(({\mathbf{v}}, {\mathbf{w}})= \sum_{j,l=1}^{3} \varepsilon_{\mathit {jl}}\, v_{j} w_{l}\) (\({\mathbf{v}}=(v_{1}, v_{2}, v_{3})\), \({\mathbf{w}}=(w_{1}, w_{2}, w_{3})\in \mathbb{R}^{3}\)) can be applied to the linear independent two vectors \(\widetilde{\mathbf{m}}\) and \(\widetilde{\mathbf{n}}\) in (3.8) to see that the last term is positive for all \(\theta\). Since the matrix \({\mathbf{S}}\) is positive definite for \(0\le v< v_{\mathrm{L}}\) and for all \(\theta\), so is the matrix \({\mathbf{M}}\). It then follows from the invertibility of the matrix \({\mathbf{P}}\) that the integrand of \(\widetilde{\mathbf{S}}_{2}\) is also positive definite for \(0\le v< v_{\mathrm{L}}\) and for all \(\theta\), which completes the proof of the proposition. □
Proposition 3.4
(cf. Sect. 6.D of [7]) A necessary and sufficient condition for the existence of surface waves (2.4in the half-space \({\mathbf{n}}\cdot{\mathbf{x}} \le0\) which propagate along the surface \({\mathbf{n}}\cdot{\mathbf{x}}=0\) in the direction of \({\mathbf{m}}\) with the phase velocity \(v_{\mathrm{S}}\) in the subsonic range \(0< v<v_{\mathrm{L}}\) and satisfy the mechanically-free and electrically-closed boundary condition (2.5at \({\mathbf{n}}\cdot{\mathbf{x}}=0\) is
Proof
Suppose that the surface waves exist, namely, suppose that there exists \(v_{\mathrm{S}}\ (0< v_{\mathrm{S}}< v_{\mathrm{L}})\) such that (3.15), which is equivalent to (3.20), holds. The first three rows of the system (3.16) are written as
and the last three rows of the system (3.16) are written as
It then follows from (3.20) and (3.32) that for \(c_{\alpha}\) in (3.20),
We observe that \(\sum_{\alpha=1}^{4} c_{\alpha}\widetilde{\mathbf{a}}_{\alpha} \ne{\mathbf{0}}\) at \(v=v_{\mathrm{S}}\), because otherwise, (3.20) implies that \(\left( \begin{array}{c} \widetilde{\mathbf{a}}_{\alpha} \\ [0.5mm] \widetilde{\mathbf{l}} _{\alpha} \end{array} \right)\ (1\le\alpha\le4)\) are linearly dependent at \(v=v_{\mathrm{S}}\), so are \(\left( \begin{array}{c} {\mathbf{a}}_{\alpha} \\ [0.5mm] {\mathbf{l}} _{\alpha} \end{array} \right)\ (1\le\alpha\le4)\). This is a contradiction. Hence the null space of \(\widetilde{\mathbf{S}}_{3}\) is not trivial at \(v=v_{\mathrm {S}}\), which gives (3.30).
Conversely, suppose that there is a speed \(v_{\mathrm{S}}\ (0< v_{\mathrm{S}}< v_{\mathrm{L}})\) for which (3.30) holds. Let
denote the \(4\times4\) matrices whose column vectors consist of \(\widetilde{\mathbf{a}}_{\alpha}\) and \(\widetilde{\mathbf {l}}_{\alpha}\) (3.19) at \(v=v_{\mathrm{S}}\). From (3.31) and (3.32) it follows that
respectively. Then
Taking the determinants of both sides of these equations, we have
and
Hence condition (3.30) implies through (3.35) that
at \(v=v_{\mathrm{S}}\). In the case when \(\det(i\,{\mathbf{I}}_{4}-\widetilde{\mathbf{S}}_{1})=0\), since Proposition 3.2 guarantees that \(\det\widetilde{\mathbf{S}}_{2}\ne0\) for \(0\le v< v_{\mathrm{L}}\), (3.34) implies that \(\det{\mathbf{L}}=0\) at \(v=v_{\mathrm{S}}\).Footnote 4 □
The following proposition describes the behavior of the eigenvalues of the \(4\times4\) real symmetric matrix \(\widetilde{\mathbf{S}}_{3}=\widetilde{\mathbf{S}}_{3}(v)\) in the subsonic range.
Proposition 3.5
-
(1)
\(\widetilde{\mathbf{S}}_{3}(0)\) is negative definite.
-
(2)
\({\frac{d}{dv} \widetilde{\mathbf{S}}_{3}}\) is positive semidefinite for \(0\le v< v_{\mathrm{L}}\).Footnote 5Further, \({\frac{d}{dv} \widetilde{\mathbf{S}}_{3}}\) is positive definite for \(0\le v< v_{\mathrm{L}}\) if and only if
$$\begin{aligned} & \Bigl(\sum_{j,l=1}^{3}e_{\mathit{ijl}}\, m_{j} m_{l} \Bigr)_{i\downarrow1,2,3} \ne\boldsymbol{0}\qquad\textit{or} \qquad\Bigl(\sum _{j,l=1}^{3}e_{\mathit{ijl}}\,n_{j} n_{l} \Bigr)_{i\downarrow1,2,3}\ne\boldsymbol{0} \\ & \textit{or} \qquad\Bigl(\sum_{j,l=1}^{3}e_{\mathit{ijl}}\, (m_{j} n_{l}+n_{j} m_{l}) \Bigr)_{i\downarrow1,2,3}\ne\boldsymbol{0}. \end{aligned}$$(3.36) -
(3)
Under the conditions (3.36), the eigenvalues of \(\widetilde{\mathbf{S}}_{3}\) are monotonic increasing functions of \(v\ (0\le v< v_{\mathrm{L}})\).
-
(4)
When one eigenvalue of \(\widetilde{\mathbf {S}}_{3}\) is zero at some \(v\) in the interval \(0< v<v_{\mathrm{L}}\), two eigenvalues of \(\widetilde{\mathbf{S}}_{3}\) are simultaneously zero at that \(v\). In other words, every zero eigenvalue of \(\widetilde{\mathbf{S}}_{3}\) has multiplicity 2 at that \(v\).
Remark 3.6
When all the three vectors on the left hand sides of (3.36) vanish, we get a system of 9 equations for the components of the piezoelectric tensor \(\boldsymbol{e}\). Since \(\boldsymbol{e}\) has possibly 18 independent components, there exists a non-trivial \(\boldsymbol{e}\) which makes those three vectors vanish. In fact, under the setting of Sect. 2.2, where the elasto-piezo-dielectric matrix is given by (2.7) and \({\mathbf{m}}=(1,0,0)\), \({\mathbf{n}}=(0,1,0)\), (3.36) is equivalent to \(e_{42}\ne0\). In Sect. 4 we will see that \(d\widetilde{\mathbf{S}}_{3}/dv\) is not positive definite when \(e_{42}=0\) (see Remark 4.1). The condition (3.36) seems to have been missed in the literature. Assertion 1 of the proposition corresponds to (5.6) of [7], assertion 2 to (5.7) of [7], assertion 3 to the paragraph just before (5.10) of [7], and assertion 4 to (3.14) of [6]. Cf. Lothe and Barnett’s notation in Footnote 2.
Proof
We observe that the integrands of the subblocks of \(\widetilde{\mathbf{S}}_{3}\) in (3.18), i.e., the integrands of \(({\mathbf{S}}_{3})_{{\scriptstyle i\downarrow1,2,3\atop\scriptstyle k\rightarrow1,2,3}}\), \(({\mathbf{S}}_{1}^{T})_{{\scriptstyle i\downarrow1,2,3\atop\scriptstyle k=4}}\), and \(({\mathbf{S}}_{2})_{{\scriptstyle i=4\atop\scriptstyle k=4}}\), are written through (3.13), (3.23) and (3.27) as
respectively. Put the right hand sides of the preceding equations as
Hence \(\widetilde{\mathbf{S}}_{3}\) can be expressed as
To prove (1), it is convenient to use an alternative expression to (3.25) when \(v=0\). Note from (2.2) that \({\mathbf{T}}_{C}\) in (3.22) is positive definite for all \(\theta\) when \(v=0\).
Lemma 3.7
When \(v=0\), we have
Proof of Lemma
The assertion follows immediately from the blockwise expression of \({\mathbf{T}}(\theta)\, {\mathbf{T}}(\theta)^{-1}= {\mathbf{I}}_{4}\) in the same way as we have derived (3.26) from \({\mathbf{T}}(\theta)^{-1}\, {\mathbf{T}}(\theta) = {\mathbf{I}}_{4}\). □
Now we decompose the integrand of \(\widetilde{\mathbf{S}}_{3}\) (3.38) as
where
Let us compute \({\mathbf{B}}+s^{-1} \boldsymbol{f}\boldsymbol{f}^{T}\), the upper left hand \(3\times3\) block of \(\widetilde{\mathbf{M}}\), at \(v=0\). Since the second formula of (3.37) implies that
it follows from the first formula of (3.37) and that of (3.39) that
which is nothing but the integrand of \(({\mathbf{S}}_{3})_{{\scriptstyle i\downarrow1,2,3\atop\scriptstyle k\rightarrow 1,2,3}}\) without having piezoelectric coupling. Under the positive definiteness condition for C in (2.2), it is proved in [25, 26] that for an arbitrary nonzero vector \(\boldsymbol{v}\in\mathbb{R}^{3}\), \(\boldsymbol{v}^{T} \left( -{\mathbf{Q}}_{C}+{\mathbf {R}}_{C}\,{\mathbf{T}}_{C}^{-1}\, { \mathbf{R}}_{C}^{T}\right)_{v=0} \boldsymbol{v}\) is negative almost everywhere in \([-\pi, \pi]\). Thus, since \(s\) is positive at \(v=0\) and the matrix \(\widetilde{\mathbf{P}}\) is invertible for all \(\theta\), for an arbitrary nonzero vector \(\boldsymbol{w}\in\mathbb{R}^{4}\), \(\boldsymbol{w}^{T} \left( \widetilde{\mathbf{P}}^{T}\, \widetilde{\mathbf{M}}\, \widetilde{\mathbf{P}}\right)_{v=0} \boldsymbol{w}\) is negative almost everywhere in \([-\pi, \pi]\), which implies that \(\boldsymbol{w}^{T}\, \widetilde{\mathbf{S}}_{3}(0)\, \boldsymbol{w}< 0\). This proves (1) of the proposition.
To prove (2),Footnote 6 we first observe from (3.18) that for an arbitrary non-zero vector \(\boldsymbol{w}=(v_{1}, v_{2}, v_{3}, v_{4})\in\mathbb{R}^{4}\),
Let us compute the integrands of \(d{\mathbf{S}}_{i}/{dv}\ (i=1,2,3)\). From (3.9) it follows that
where \({\mathbf{J}}_{4}\) is a \(4\times4\) matrix defined by \({\mathbf{J}}_{4}=\left( \begin{array}{c@{\ \ }|@{\ \ }c} {\mathbf{I}}_{3} & \boldsymbol{0} \\ \hline \boldsymbol{0}^{T} & 0 \end{array} \right)\). Since
we get
Hence,
Put
Taking account of \({\mathbf{J}}_{4}^{2}={\mathbf{J}}_{4}\), we see from (3.43) that
which is the integrand of \(d{\mathbf{S}}_{3}/dv\).
It follows from the second equation of (3.41), (3.42) and (3.44) that
which is the integrand of \(d{\mathbf{S}}_{1}/dv\).
The integrand of \(d{\mathbf{S}}_{2}/dv\) is (3.42). Hence we can write (3.40) as
Now putting
and observing that \({\mathbf{J}}_{4}{\mathbf{K}}(\theta)={\mathbf {K}}(\theta)\), we get
The last integral is non-negative, which proves that \(d \widetilde{\mathbf{S}}_{3}/dv\) is positive semidefinite. To show that the integral is positive, we will observe that the integrand \({\mathbf{W}}(\theta)^{T}\, {\mathbf{W}}(\theta)\) is strictly positive at some \(\theta\in[-\pi, \pi]\).
When \((v_{1}, v_{2}, v_{3})^{T}\ne\boldsymbol{0}\), the integrand \({\mathbf{W}}(\theta)^{T}\, {\mathbf{W}}(\theta)\) takes a positive value \(v_{1}^{2}+v_{2}^{2}+v_{3}^{2}\) at \(\theta=0\).
When \((v_{1}, v_{2}, v_{3})^{T} =\boldsymbol{0}\) and \(v_{4}\ne0\), the integrand \({\mathbf{W}}(\theta)^{T}\, {\mathbf{W}}(\theta)\) equals to the last term of the displayed integrand of (3.45), which can be computed through (3.23) as
By the second equation of (3.25) and the invertibility of \({\mathbf{S}}\), the integrand becomes positive at some \(\theta\in[-\pi, \pi]\) if and only if
By (3.8) and the second equation of (3.22), this is equivalent to (3.36).
Assertions (3) and (4) can be proved by using a well-known approach. See, for example, Sect. 3 of [6], Sects. 7.B and 8.A.1 of [10], and Theorem 3.12 and Lemma 3.15 of [20]. □
From Propositions 3.4 and 3.5 we can immediately conclude Proposition 2.1. If we suppose only that \(d\widetilde{\mathbf{S}}_{3}/dv\) is positive semidefinite and do not assume its positive definiteness, then the eigenvalues of \(\widetilde{\mathbf{S}}_{3}\) are not necessarily strictly increasing with respect to the increasing \(v\), which implies the possibility of the existence of infinitely many (or, unstable) subsonic surface waves under the mechanically-free and electrically-closed condition at the surface. Thus, Proposition 2.1 will need (3.36) as a prerequisite condition.
4 Derivation of Formula for \(v_{{\mathrm{BG}}}^{\mathrm {hex}}\) from the Integral Formalism
In this section we will derive the formula (2.9) for \(v_{{\mathrm{BG}}}^{\mathrm{hex}}\) by using Proposition 3.4. Just to obtain the formula, the method using the factFootnote 7 that \(\det{\mathbf{L}}=0\) at \(v=v_{{\mathrm{BG}}}^{\mathrm{hex}}\) is more efficient. In this section, however, we base our computation on the integral formalism in the preceding section. An advantage of this computation will be recognized in the derivation of the perturbation formula for the phase velocity of BG waves in the next section.
We start with putting the elasto-piezo-dielectric matrix \({\mathrm{P}}={\mathrm{P}}_{\mathrm{hex}}\) with \({\mathrm {P}}_{\mathrm{hex}}\) given by (2.7) and consider surface waves which propagate along the surface \(x_{2}= 0\) of the piezoelectric half-space \(x_{2}\le0\) in the direction of the 1-axis. We first give a formula for the matrix \(\widetilde{\mathbf{S}}_{3} \) in (3.18) under the present setting, which we denote by \(\widetilde{\mathbf{S}}_{3}^{\mathrm {hex}}\). For this purpose, let us compute the matrices \({\mathbf{Q}}(\theta)\), \({\mathbf{R}}(\theta)\), \({\mathbf {T}}(\theta)\) in (3.9) and the matrices \({\mathbf{S}}_{i}\ (i=1,2,3)\) in (3.13), which we also denote by \({\mathbf{Q}}^{\mathrm{hex}}(\theta)\), \({\mathbf{R}}^{\mathrm {hex}}(\theta)\), \({\mathbf{T}}^{ \mathrm{hex}}(\theta)\), and \({\mathbf{S}}_{i}^{\mathrm{hex}}\ (i=1,2,3)\), respectively. From \({\mathbf{m}}=(1,0, 0)\), \({\mathbf{n}}=(0, 1, 0)\) and (3.8) we get
It then follows from (2.7) and (3.9) that
with \(V=\rho\, v^{2}\), the last formula of which implies that the determinant of \({\mathbf{T}}^{\mathrm{hex}}(\theta)\) becomes
Since \(A>(A-N)/2\) follows from (2.8), the limiting velocity \(v_{\mathrm{L}}^{\mathrm{hex}}\), which is defined by (3.10) with \({\mathbf{T}}(\theta)\) there replaced by \({\mathbf{T}}^{\mathrm{hex}}(\theta)\), is given (cf. Sect. 10 of [7]) by
Then for \(0< v< v_{\mathrm{L}}^{\mathrm{hex}}\), the inverse matrix of \({\mathbf{T}}^{\mathrm{hex}}(\theta)\) is written as
where
The computations of (3.13) lead us to
where
Hence the blockwise expression of \(\widetilde{\mathbf{S}}_{3} \) in (3.18) implies that
Remark 4.1
Suppose that \(e_{42}=0\). Then \(Z_{33}(V)=\Delta(V)/\varepsilon _{22}=\sqrt{L(L-V)}\) and the lower right hand \(2\times2\) block of \(\widetilde{\mathbf{S}}_{3}^{\mathrm{\, hex}}\) becomes \(\left( \begin{array}{c@{\quad}c} -\sqrt{L(L-V)}-{e_{41}^{2}}/{\varepsilon_{22}}& -{e_{41}}/{\varepsilon_{22}} \\ [0.5mm] -{e_{41}}/{\varepsilon_{22}} & -{1}/{\varepsilon_{22}} \end{array} \right)\), from which \(\frac{d \widetilde{\mathbf{S}}_{3}^{\mathrm{\, hex}}}{dv}\) can not be positive definite for \(0< v< v_{\mathrm{L}}^{\mathrm{hex}}\).
By \(A>(A-N)/2\) and (4.4), the multiplier of \(R(V)\) in the (2,2) component, which we denote by \(S(V)\) henceforward, neither vanishes nor goes to infinity for \(0< v< v_{\mathrm{L}}^{\mathrm{hex}}\). Therefore, Proposition 3.4 implies that the velocity of the subsonic surface waves must satisfy either
The former equality \(R(V)=0\) is a secular equation for the phase velocity \(v_{\mathrm{R}}^{\mathrm{hex}}\) of the Rayleigh-type waves. We see that \(v_{\mathrm{R}}^{\mathrm{hex}}\) is nothing but the phase velocity of Rayleigh waves which propagate along the surface of an isotropic elastic half-space whose Lamé constants \(\lambda\) and \(\mu\) are given by \(\lambda=N\) and \(\mu=\frac{A-N}{2}\). This secular equation has a simple unique root in the interval \(0< V<\mu=\frac{A-N}{2}\). The latter equality \(Z_{33}(V)=0\) gives the solution \(v_{{\mathrm{BG}}}^{\mathrm{hex}}\) in (2.9). Observe from (4.8) that the rank of the matrix \(\widetilde{\mathbf{S}}_{3}^{\mathrm{\, hex}}\) reduces to 2 when \(v=v_{\mathrm{R}}^{\mathrm{hex}}\) and \(v=v_{{\mathrm{BG}}}^{\mathrm {hex}}\). This fact has been guaranteed by (4) of Proposition 3.5.
Remark 4.2
By the theory developed in Sect. 3, the phase velocity of subsonic surface waves is obtained as the vanishing point of the eigenvalues of the real symmetric matrix \(\widetilde{\mathbf {S}}_{3}\) along the increasing velocity and we have seen the detailed behavior of those eigenvalues, which proves that the BG waves stably exist and the local uniqueness of them follows even when we add an arbitrary small perturbation to the material constants. This allows us to study the perturbation of phase velocity of BG waves in the subsequent section. We note that Lothe and Barnett showed in the last section of [7] several pictures depicting the velocity surfaces of surface waves by conducting numerical experiments under the assumption that the propagation directions deviate slightly from their original symmetry directions.
5 First-Order Perturbation Formula of BG-Wave Velocity
To the material constants of the piezoelectric half-space of \(C_{6}\) hexagonal symmetry whose elasto-piezo-dielectric matrix is \({\mathrm {P}}_{\mathrm{hex}}\) in (2.7) we add a perturbation \({\mathrm{P}}_{\mathrm {ptb}}\), which is written in the Voigt notation as
The upper left hand \(6\times6\) block \((a_{\mathit {ijkl}})_{i,j,k,l=1,2,3}\) is the perturbative part of the elasticity tensor \({\mathbf{C}}\), the upper right hand \(6\times3\) block \((f_{\mathit{ijl}})_{i,j,l=1,2,3}\) is the perturbative part of the piezoelectric tensor \(\boldsymbol{e}\), and the lower right hand \(3\times3\) block \((\delta_{\mathit{jl}} )_{j,l=1,2,3}\) is the perturbative part of the dielectric tensor \(\boldsymbol{\varepsilon}\), for all of which we do not assume any material symmetry. Hence the 45 components in the upper triangular part of matrix \({\mathrm{P}}_{\mathrm{ptb}}\) are generally all independent.
Suppose that the piezoelectric half-space occupies the region \(x_{2}\le0\) and its elasto-piezo-dielectric matrix \({\mathrm{P}}\) in (2.6) is given by \({\mathrm{P}}={\mathrm{P}}_{\mathrm{hex}}+{\mathrm {P}}_{\mathrm{ptb}}\) with \({\mathrm{P}}_{\mathrm{ptb}}\) sufficiently small as compared with \({\mathrm{P}}_{\mathrm{hex}}\). We consider BG waves which propagate along the surface \(x_{2}=0\) in the direction of the 1-axis and investigate the perturbation of their phase velocity \(v_{{\mathrm{BG}}}\), i.e., the shift in \(v_{{\mathrm{BG}}}\) from its comparative value \(v_{{\mathrm{BG}}}^{\mathrm{hex}}\) for the \(C_{6}\) hexagonal piezoelectric half-space, caused by \({\mathrm{P}}_{\mathrm{ptb}}\). We present a velocity formula which is correct to within terms linear in the components of \({\mathrm{P}}_{\mathrm{ptb}}\).
Theorem 5.1
(Perturbation of BG waves [13]) Assume that \(e_{42}\ne0\) and that \(v_{{\mathrm{BG}}}^{\mathrm{hex}}\) defined by (2.9) is included in the subsonic range, i.e., \(v_{{\mathrm{BG}}}^{\mathrm{hex}}\) satisfies \(0< v_{{\mathrm{BG}}}^{\mathrm{hex}}< v_{\mathrm{L}}^{\mathrm{hex}}\) where \(v_{\mathrm{L}}^{\mathrm{hex}}\) is given by (4.4). We also assume that \(v_{\mathrm{R}}^{\mathrm{hex}}\), the velocity of the Rayleigh-type waves which solves \(R(V)=0\) in (4.9), is included in the subsonic range, i.e., \(v_{\mathrm{R}}^{\mathrm{hex}}\) satisfies \(0< v_{\mathrm{R}}^{\mathrm{hex}}< v_{\mathrm{L}}^{\mathrm{hex}}\), and that \(v_{{\mathrm{BG}}}^{\mathrm{hex}}\ne v_{\mathrm{R}}^{\mathrm {hex}}\). In a piezoelectric medium whose elasto-piezo-dielectric matrix \({\mathrm{P}}\) is given by \({\mathrm{P}}={\mathrm{P}}_{\mathrm{hex}}+{\mathrm{P}}_{\mathrm {ptb}}\) with small \({\mathrm{P}}_{\mathrm{ptb}}\), the phase velocity \(v_{{\mathrm {BG}}}\) of BG waves which propagate along the surface of the half-space \(x_{2}\le0\) in the direction of the 1-axis and satisfy the mechanically-free and electrically-closed condition (2.5) with \({\mathbf{n}}=(0,1,0)\) can be written, to within terms linear in the components of the perturbative part \({\mathrm{P}}_{\mathrm{ptb}}\) of \({\mathrm {P}}\), as
where \(V_{{\mathrm{BG}}}^{\mathrm{hex}}\) is given by (2.9) and the coefficients \(P_{i}\), \(D_{i}\) and \(E_{i}\ (i=1,2)\) are given by
Remark 5.2
(1) Only two components \(f_{42}\), \(f_{51}\) of the perturbative part of \(\boldsymbol{e}\), two component \(\delta_{11}\), \(\delta _{22}\) of the perturbative part of \(\boldsymbol{\varepsilon}\) and two components \(a_{44}\), \(a_{55}\) of the perturbative part of \({\mathbf{C}}\) can affect the first-order perturbation of the phase velocity \(v_{{\mathrm{BG}}}\) of BG waves that propagate in the direction of the 1-axis on the surface of the half-space \(x_{2} \leq0\). These are the perturbative parts of the only three parameters that appear in \(V_{{\mathrm{BG}}}^{\mathrm{hex}}\) (2.9). Moreover, the aforementioned components are the perturbative parts of \(\boldsymbol{e}\), \(\boldsymbol{\varepsilon}\) and \({\mathbf{C}}\) of \(C_{6}\) hexagonal symmetry which, in the constitutive equations (2.1), serve as the coefficients that multiply nonzero \({\partial u_{k}}/{\partial x_{l}}\) or \({\partial\phi}/{\partial x_{l}}\) when \((\boldsymbol{u}, \phi)\) is given by (2.10).
(2) It is obvious that the theorem applies to the case where the perturbation \({\mathrm{P}}_{\mathrm{ptb}}\) is added to the material constants of a piezoelectric half-space of \(C_{6v}\) hexagonal symmetry whose elasto-piezo-dielectric matrix is written as \({\mathrm{P}}_{\mathrm{hex}}\) with \(e_{41}=0\) (cf. (1) of Remark 2.3). The theorem applies also to the case where the perturbation \({\mathrm{P}}_{\mathrm{ptb}}\) is added to the material constants of a transversely isotropic half-space in piezoelectricity whose axis of rotational symmetry is parallel to the 3-axis. (cf. (2) of Remark 2.3).
Proof of Theorem 5.1
First we make use of (4) of Proposition 3.5 to obtain an approximate secular equation for \(v_{{\mathrm{BG}}}\), which contains terms up to those linear in the components of \({\mathrm{P}}_{\mathrm{ptb}}\).
Suppose that we could write the matrix \(\widetilde{\mathbf{S}}_{3}\) (3.18), to within terms linear in \({\mathrm{P}}_{\mathrm{ptb}}\), as
Here and hereafter we use the notation ≈ to indicate that we are retaining terms up to those linear in the components of \({\mathrm{P}}_{\mathrm{ptb}}\), and that we are neglecting the higher order terms. \(\widetilde{\mathbf{S}}_{3}^{\mathrm{\, hex}} \) is given by (4.8), the principal part of \(\widetilde{\mathbf{S}}_{3}\). \(\widetilde{\mathbf{S}}_{3}^{\mathrm{\, ptb}}\) is the perturbative part of \(\widetilde{\mathbf{S}}_{3}\), whose components \(p_{ij}=p_{ij}(V) \ (1\le i \le j\le4)\) are linear functions of the components of \({\mathrm{P}}_{\mathrm{ptb}}\). From (4.8) we can write
By (4) of Proposition 3.5, a zero eigenvalue of \(\widetilde{\mathbf{S}}_{3}\) has multiplicity 2 at \(v=v_{{\mathrm{BG}}}\), and hence, the rank of \(\widetilde{\mathbf{S}}_{3}\) decreases by two at that \(v\), which implies that the \((3,3)\) minor of the preceding matrix, i.e., the determinant of the submatrix formed by striking out the third row and third column, must vanish at \(v=v_{{\mathrm{BG}}}\). Since \(p_{ij}\ (1\le i\le j\le4)\) are linear functions of \({\mathrm{P}}_{\mathrm{ptb}}\), the \((3,3)\) minor becomes
Since \(R(V)=0\) has at most a unique solution \(v=v_{\mathrm {R}}^{\mathrm{hex}}\) in \(0< v< v_{\mathrm{L}}^{\mathrm{hex}}\) and \(v_{{\mathrm{BG}}}^{\mathrm{hex}}\ne v_{\mathrm{R}}^{\mathrm {hex}}\), we can divide the last formula by \(R(V)\) to obtain an approximate secular equation for \(v_{{\mathrm{BG}}}\)
where
From Taylor’s expansion of \(v_{{\mathrm{BG}}}\) around \({\mathrm{P}}_{\mathrm{ptb}}={\mathbf{O}}\), we get
where each summation on the right hand side is taken for the indices shown in (5.1), i.e., the Greek subscripts range over 1 to 6 under the Voigt notation and the roman subscripts range over 1 to 3. Applying the implicit function theorem to (5.5), we get
Recalling that \(Z_{33}(V_{{\mathrm{BG}}}^{\mathrm{hex}})=0\) and \(p_{ij}|_{{\scriptscriptstyle{\mathrm{P}}_{\mathrm{ptb}}} ={\mathbf{O}}}=0\), we observe from (5.6) that
Since it follows from (4.7) and (4.9)2 that
\(\frac{\partial\,\Sigma(V)}{\partial V}\) does not vanish at \({\mathrm{P}}_{\mathrm{ptb}} ={\mathbf{O}}\), \(V=V_{{\mathrm {BG}}}^{\mathrm{hex}}\), and equation (5.8), combined with (5.9), implies that
A parallel procedure can be applied to express the other derivatives of \(V_{{\mathrm{BG}}}\) in (5.7) in terms of the derivatives of \(p_{44}\), which leads us to
Therefore, to obtain a first-order perturbation formula for \(V_{{\mathrm{BG}}}\), we only have to look into \(p_{44}\), the \((4,4)\) component of \(\widetilde{\mathbf{S}}_{3}^{\mathrm{\, ptb}}\), which is, by (3.18), the \((4,4)\) component of the perturbative part of \({\mathbf{S}}_{2}\), to which we will turn our computations.
By (3.9) and \({\mathrm{P}}={\mathrm{P}}_{\mathrm{hex}}+{\mathrm{P}}_{\mathrm {ptb}}\) we can write
where \({\mathbf{T}}^{\mathrm{hex}}(\theta)\) is given by (4.2) and
with \(\widetilde{\mathbf{m}}=(\widetilde{m}_{1}, \widetilde{m}_{2}, \widetilde{m}_{3} )\) and \(\widetilde{\mathbf{n}}=(\widetilde{n}_{1} , \widetilde{n}_{2} , \widetilde{n}_{3} )\) in (4.1). Then
which allows us to write
here
is of zeroth order in \({\mathrm{P}}_{\mathrm{ptb}}\) and is given by (4.6), whereas
is of first order in \({\mathrm{P}}_{\mathrm{ptb}}\), which is the perturbative part of \({\mathbf{S}}_{2}\).
We will compute \(p_{44}\), the \((4,4)\) component of \({\mathbf{S}}_{2}^{\mathrm{ptb}}\). The \((4,4)\) component of the integrand of (5.13) is the inner product of the 4th row vector of \({\mathbf{T}}^{\mathrm{hex}}(\theta)^{-1}\) and the 4th column vector of \({\mathbf{T}}^{\mathrm{ptb}}(\theta)\, {\mathbf{T}}^{\mathrm {hex}}(\theta)^{-1}\). Looking at the 4th row of the matrix \({\mathbf{T}}^{\mathrm{hex}}(\theta )^{-1}\) in (4.5), we only need the \((3,4)\) and \((4,4)\) components of \({\mathbf{T}}^{\mathrm{ptb}}(\theta)\, {\mathbf{T}}^{\mathrm {hex}}(\theta)^{-1}\). In the same way, to compute the \((3,4)\) and \((4,4)\) components of \({\mathbf{T}}^{\mathrm{ptb}}(\theta)\, {\mathbf{T}}^{\mathrm {hex}}(\theta)^{-1}\), we need \((3,3)\), \((3,4)\), \((4,3)\) and \((4,4)\) components of \({\mathbf{T}}^{\mathrm{ptb}}(\theta)\). Thus we get through (4.1) and (5.12)
and then by (4.5),
which implies that
Since the integration of odd functions of \(\theta\) over the interval \([-\pi, \pi]\) gives zero, we observe that the \((4,4)\) components of (5.13) is written as
The coefficients of \(a_{44}\), \(a_{55}\), \(f_{42}\), \(f_{51}\), \(\delta _{22}\) and \(\delta_{11}\) on the right hand side are equal to \(\frac{\partial p_{44}}{a_{44}}\), \(\frac{\partial p_{44}}{a_{55}}\), \(\frac{\partial p_{44}}{f_{42}}\), \(\frac{\partial p_{44}}{f_{51}}\), \(\frac{\partial p_{44}}{\delta_{22}}\) and \(\frac{\partial p_{44}}{\delta_{11}}\) in (5.11), respectively. These can be integrated explicitly. For instance, by a simple computation it follows that
which, combined with \(\Delta(V_{{\mathrm{BG}}}^{\mathrm{hex}})=e_{42}^{2}\), becomes
Substituting this into (5.11), we obtain the \(a_{44}\)-term on the right hand side of (5.2). A similar method can be applied to get the other terms in (5.2). This completes the proof of Theorem 5.1. □
Remark 5.3
Vanishing of the (2,2) minor of the matrix on the right hand side of (5.4) gives an approximate secular equation for the phase velocity \(v_{\mathrm{R}}\) of Rayleigh-type waves, which is written as
In fact, the (2,2) minor becomes
Since \(R(V)=0\) at \(v=v_{\mathrm{R}}^{\mathrm{hex}}\), it follows that
at \(v=v_{\mathrm{R}}\). Moreover, \(v_{{\mathrm{BG}}}^{\mathrm{hex}}\ne v_{\mathrm{R}}^{\mathrm{hex}}\) implies that \(Z_{33}(V) \ne0\) at \(v=v_{\mathrm{R}}\), and \(0< v< v_{\mathrm {L}}^{\mathrm{hex}}\) implies that \(\Delta(V)>0\). Hence the vanishing of the last formula (5.15) leads us to (5.14).
We can then derive from (5.14) a first-order perturbation formula for \(v_{\mathrm{R}}\) by an argument parallel to the proof of Theorem 5.1. The resulting formula is the same as formula (3.93) in [20] (see also [28]) under the replacement of the indices 1, 2, 3 of \(a_{\mathit{ijkl}}\) and \(\gamma_{\mathit{ijkl}}\) there by the indices 3, 1, 2, respectively, and \(v_{\mathrm{R}}^{\mathrm{Iso}}\) there by \(v_{\mathrm {R}}^{\mathrm{hex}}\) in (4.9), and the replacement \(\lambda\) and \(\mu\) there by \(N\) and \(\frac{A-N}{2}\), respectively. We see from (3.18) and (5.3) that \(p_{11}(V)\) in (5.14) is equal to the \((1,1)\) component of the perturbative part of \({\mathbf {S}}_{3}\), which is also the same as \(s_{22}(v)\) in Lemma 3.21 of [20] under the abovementioned replacements.
Thus we observe that the perturbation of the piezoelectric tensor \(\boldsymbol{e}\) and the perturbation of the dielectric tensor \(\boldsymbol{\varepsilon}\) do not have any effect on the first-order perturbation of the phase velocity \(v_{\mathrm{R}}\) of Rayleigh-type waves.
Remark 5.4
Let us return to the setting of Sect. 2.2 where the piezoelectric half-space \(x_{2}\le0\) has \(C_{6}\) hexagonal symmetry and the elasto-piezo-dielectric matrix is given by \({\mathrm {P}}_{\mathrm{hex}}\) of (2.7), but suppose that BG waves propagate along the surface \(x_{2}= 0\) in the direction of \((\cos\varphi, 0, \sin\varphi)\). Here \(\varphi\) is a sufficiently small angle between the 1-axis and the propagation direction of the waves on the surface \(x_{2}=0\). By the theory in Sect. 3, such perturbed waves exist uniquely and stably. Let \(v_{\mathrm{BG}}^{\varphi}\) be the phase velocity of the perturbed BG waves. Note that \(v_{\mathrm{BG}}^{\varphi}\) equals to \(v_{\mathrm {BG}}^{\mathrm{hex}}\) in (2.9) when \(\varphi=0\).
To use Proposition 3.4, we put \({\mathbf {m}}=(\cos\varphi,0, \sin\varphi)\), \({\mathbf{n}}=(0, 1, 0)\). It then follows from (3.9), (3.13) and (3.18) that \(\det\widetilde{\mathbf {S}}_{3}\) depends on \(v\) and \(\varphi\) analytically near \((v, \varphi )=(v_{\mathrm{BG}}^{\mathrm{hex}}, 0)\). Hence we can apply the implicit function theorem to the secular equation (3.30) to see that \(v_{\mathrm {BG}}^{\varphi}\) depends on \(\varphi\) analytically near \(\varphi=0\), which implies that \(\varphi=0\) is an isolated point of \(\varphi\) such that \(v(\varphi)=v_{\mathrm{BG}}^{\mathrm{hex}}\), unless \(v(\varphi )\) is identically equal to \(v_{\mathrm{BG}}^{\mathrm{hex}}\) near \(\varphi=0\).
Now we rotate the medium around the 2-axis by the angle \(\varphi\) so that the propagation direction coincides with the 1-axis and then, we can use formula (5.2). In fact, under this rotation, the components of the fourth order tensor \({\mathbf{C}}\), the third order tensor \(\boldsymbol{e}\) and the second order tensor \(\boldsymbol{\varepsilon}\) are transformed, which allows us to write the elasto-piezo-dielectric matrix after the rotation as \({\mathrm{P}}_{\mathrm{hex}}+{\mathrm {P}}_{\mathrm{ptb}}\), where the components of \({\mathrm{P}}_{\mathrm {ptb}}\) are written under the notation in (5.1) as
with the \(Q_{ip}\)’s being the entries of the transformation matrix pertaining to the rotation of the medium around the 2-axis by the angle \(\varphi\)
whereas \(C_{\mathit{ijkl}}\), \(e_{ijk}\) and \(\varepsilon_{ij}\ (i,j,k,l=1,2,3)\) are the components of the tensors \({\mathbf{C}}\), \(\boldsymbol{e}\) and \(\boldsymbol{\varepsilon}\) of \(C_{6}\) hexagonal symmetry, respectively, which constitute \({\mathrm {P}}_{\mathrm{hex}}\) before the rotation.
It follows from (5.16) and (5.17) that \(f_{42}\), \(f_{51}\), \(\delta_{11}\), \(\delta_{22}\), \(a_{44}\) and \(a_{55}\), the components of \({\mathrm{P}}_{\mathrm{ptb}}\) which appear in formula (5.2), all are of second order in \(\varphi\) when \(\varphi\) is sufficiently small. For instance,
each of which vanishes at \(\varphi=0\) and has its first order derivative in \(\varphi\) vanish at \(\varphi=0\). In Sect. 5 we have used the approximate secular equation (5.5) to derive formula (5.2). The difference between the left hand side of (5.5) and that of the exact secular equation derived from (3.30) are of second order in the components of \({\mathrm{P}}_{\mathrm{ptb}}\). The components of \({\mathrm{P}}_{\mathrm{ptb}}\) other than \(f_{42}\), \(f_{51}\), \(\delta_{11}\), \(\delta_{22}\), \(a_{44}\) and \(a_{55}\) may not be of second order in \(\varphi\) when \(\varphi\) is sufficiently small, but at least, are of first order in \(\varphi\) from (5.16) and (5.17). Hence again, the implicit function theorem implies that \(\varphi=0\) is a stationary point of \(v_{\mathrm{BG}}^{\varphi}\) near \(\varphi=0\).
In our forthcoming paper, we will apply the preceding assertion to discuss the problem of determining the axis of symmetry of a \(C_{6}\) hexagonal piezoelectric material from measurements of the perturbation of the phase velocity of BG waves.
Notes
See, for example, the references listed just before Theorem 3.1.
Lothe and Barnett [7] used, instead of \(\widetilde{\mathbf{S}}_{2}\) and \(\widetilde{\mathbf{S}}_{3}\), the matrices \({\mathbf{Q}}_{F} = \left( \begin{array}{c@{\ \ }|@{\ \ }c} (-{\mathbf{S}}_{2})_{{\scriptstyle i\downarrow1,2,3\atop\scriptstyle k\rightarrow 1,2,3}} & ({\mathbf{S}}_{1})_{{\scriptstyle i\downarrow1,2,3\atop\scriptstyle k=4}} \\ \hline ({\mathbf{S}}_{1}^{T})_{{\scriptstyle i=4\atop\scriptstyle k\rightarrow 1,2,3}} & (-{ \mathbf{S}}_{3})_{{\scriptstyle i=4\atop\scriptstyle k=4}} \end{array} \right) \) and \({\mathbf{B}}_{F} = \left( \begin{array}{c@{\ \ }|@{\ \ }c} (-{\mathbf{S}}_{3})_{{\scriptstyle i\downarrow1,2,3\atop\scriptstyle k\rightarrow 1,2,3}} & ({\mathbf{S}}_{1}^{T})_{{\scriptstyle i\downarrow1,2,3\atop\scriptstyle k=4}} \\ \hline ({\mathbf{S}}_{1})_{{\scriptstyle i=4\atop\scriptstyle k\rightarrow 1,2,3}} & (-{ \mathbf{S}}_{2})_{{\scriptstyle i=4\atop\scriptstyle k=4}} \end{array} \right) \), respectively. Hence the proposition was stated in [7] as “\({\mathbf{Q}}_{F}\) is negative definite for \(0\le v< v_{\mathrm{L}}\)”. See (5.3), (5.4) and (5.10) therein.
This assertion is worth attention because when \(0 < v<v_{\mathrm{L}}\), \({\mathbf{T}}_{C}\) is not necessarily positive definite for all \(\theta\). Observe that \(v_{\mathrm{L}}> v_{{\mathrm{L}}, C}\) where \(v_{{\mathrm{L}}, C} = \inf\{v>0\ |\ \exists\, \theta,\, \det {\mathbf{T}}_{C}(\theta)=0\}\) is the limiting velocity without having piezoelectric coupling.
This proof of sufficiency follows the proof of sufficiency in Lemma 3.11 of [20].
The proof basically uses the method in [27].
See the proof of sufficiency in Proposition 3.4.
References
Maugin, G.A.: Continuum Mechanics of Electromagnetic Solids. North-Holland, Amsterdam (1988)
Ristic, V.M.: Principles of Acoustic Devices. Wiley, New York (1983)
Tiersten, H.F.: Linear Piezoelectric Plate Vibrations. Plenum Press, New York (1969)
Bleustein, J.L.: A new surface wave in piezoelectric materials. Appl. Phys. Lett. 13, 412–413 (1968)
Gulyaev, Yu.V.: Electroacoustic surface waves in solids. JETP Lett. 9, 37–38 (1969)
Lothe, J., Barnett, D.M.: Integral formalism for surface waves in piezoelectric crystals. Existence considerations. J. Appl. Phys. 47, 1799–1807 (1976)
Lothe, J., Barnett, D.M.: Further development of the theory for surface waves in piezoelectric crystals. Phys. Norv. 8, 239–254 (1976)
Barnett, D.M., Lothe, J.: Synthesis of the sextic and the integral formalism for dislocations, Green’s functions, and surface waves in anisotropic elastic solids. Phys. Norv. 7, 13–19 (1973)
Barnett, D.M., Lothe, J.: Free surface (Rayleigh) waves in anisotropic elastic half spaces: the surface impedance method. Proc. R. Soc. Lond. A 402, 135–152 (1985)
Chadwick, P., Smith, G.D.: Foundations of the theory of surface waves in anisotropic elastic materials. Adv. Appl. Mech. 17, 303–376 (1977)
Lothe, J., Barnett, D.M.: On the existence of surface-wave solutions for anisotropic elastic half-spaces with free surface. J. Appl. Phys. 47, 428–433 (1976)
Ting, T.C.T.: Anisotropic Elasticity. Oxford University Press, New York (1996)
Nakamura, G., Tanuma, K., Xu, X.: On the perturbation of Bleustein–Gulyaev waves in piezoelectric media. In: Itou, H., Hirano, S., Kimura, M., Kovtunenko, V.A., Khludnev, A.M. (eds.) Mathematical Analysis of Continuum Mechanics and Industrial Applications III, Proceedings of the International Conference CoMFoS18. Mathematics for Industry, vol. 34, pp. 67–79. Springer, Berlin (2020). https://doi.org/10.1007/978-981-15-6062-0_5
Wang, Z.: Piezotronics and Piezo-Phototronics. Springer, Berlin (2012)
Fialka, J., Beneš, P.: Comparison of methods of piezoelectric coefficient measurement. In: 2012 IEEE International Instrumentation and Measurement Technology Conference Proceedings, pp. 37–42 (2012)
Kaltenbacher, B., Lahmer, T., Mohr, M., Kaltenbacher, M.: PDE based determination of piezoelectric material tensors. Eur. J. Appl. Math. 17, 383–416 (2006). https://doi.org/10.1017/S0956792506006474
Cowin, S.C., Mehrabadi, M.M.: On the identification of material symmetry for anisotropic elastic materials. Q. J. Mech. Appl. Math. 40, 451–476 (1987)
Klimeš, L.: Determination of the reference symmetry axis of a generally anisotropic medium which is approximately transversely isotropic. Stud. Geophys. Geod. 60, 391–402 (2016). https://doi.org/10.1007/s11200-015-0482-0
Sirotin, Yu.I., Shaskolskaya, M.P.: Fundamentals of Crystal Physics. Mir Publishers, Moscow (1982)
Tanuma, K.: Stroh formalism and Rayleigh waves. J. Elast. 89, 5–154 (2007). https://doi.org/10.1007/s10659-007-9117-1
Collet, B., Destrade, M.: Explicit secular equations for piezoacoustic surface waves: shear-horizontal modes. J. Acoust. Soc. Am. 116, 3432–3442 (2004). https://doi.org/10.1121/1.1819503
Collet, B., Destrade, M.: Explicit secular equations for piezoacoustic surface waves: Rayleigh modes. J. Appl. Phys. 98, 054903 (2005). https://doi.org/10.1063/1.2031948
Koerber, G.G., Vogel, R.F.: SH-mode piezoelectric surface waves on rotated cuts. IEEE Trans. Sonics Ultrason. Phys. SU–20, 9–12 (1973)
Royer, D., Dieulesaint, E.: Elastic Waves in Solids I, Free and Guided Propagation. Springer, Heidelberg (2000)
Gunderson, S.A., Barnett, D.M., Lothe, J.: Rayleigh wave existence theory: a supplementary remark. Wave Motion 9, 319–321 (1987)
Ting, T.C.T.: Some identities and the structure of \({\mathbf{N}}_{i}\) in the Stroh formalism of anisotropic elasticity. Q. Appl. Math. 46, 109–120 (1988)
Chadwick, P., Jarvis, D.A.: Interfacial waves in a prestrained neo-Hookean body I. Biaxial states of strain. Q. J. Mech. Appl. Math. 32, 387–399 (1979)
Tanuma, K., Man, C.-S.: Perturbation formula for phase velocity of Rayleigh waves in prestressed anisotropic media. J. Elast. 85, 21–37 (2006). https://doi.org/10.1007/s10659-006-9067-z
Acknowledgements
We thank the reviewers for their careful reading of our manuscript and for the helpful comments. The work of K.T. was partly supported by Japan Society for the Promotion of Science (JSPS) KAKENHI Grant No. JP19K03559. The research efforts of X. X. were partially supported by National Natural Science Foundation of China Nos. 11621101, 12071430. The work of G.N. was partly supported by JSPS KAKENHI Grant No. JP19K03554.
Author information
Authors and Affiliations
Contributions
Both K.T., X.X. and G.N. equally contribute to the analysis in this manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Tanuma, K., Xu, X. & Nakamura, G. Perturbation of Bleustein–Gulyaev Waves in Piezoelectric Media: Barnett and Lothe Integral Formalism Revisited. J Elast 153, 423–453 (2023). https://doi.org/10.1007/s10659-023-10005-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10659-023-10005-0