
Abstract
Complex dynamic systems such as common-pool resource systems can undergo a critical shift at a given threshold, the so-called tipping point, which potentially requires substantial changes from the management system. We present in this research a framed laboratory experiment design to examine how the threat of economic sanctions influences the strategic management of a common-pool resource. We use the context of the East Atlantic bluefin tuna international fishery as it has been the archetype of an overfished and mismanaged fishery until a dramatic reinforcement of its regulations followed the threat of a trade ban. We consider endogenous threats and examine their effects on cooperation through harvest decisions taken in the context of non-cooperative game theory in which cooperation could be sustained using a trigger strategy. Our experiment results show that the threat of economic sanctions fosters more cooperative behaviors, less over-exploitation, and a more precautionary management of resources, reducing the economic rent dissipation. This result is exacerbated when the location of the tipping point that triggers the economic sanction is uncertain. In order to avoid free-riding behaviors and foster the emergence of a self-enforcing agreement, we suggest to introduce economic sanctions, such as trade restrictions, associated with uncertain biological limit reference points.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Like many natural resources, most of the fishery resources and more particularly the internationally shared fisheries fall into the category of common-pool resources (CPRs), which have faced management difficulties in addressing both conservation and economic challenges leading to over-exploitation (Pauly et al. 1998; Worm et al. 2009). In such CPR, the incentives to catch more resources and ignore the external costs are rational because ‘’individuals’’ (i.e. states, companies etc.) receive benefits for themselves without bearing the social costs. Collectively, this rational individual behavior leads to the well-known tragedy of the commons (Gordon 1954; Hardin 1968).
Cooperation in CPR dilemmas has been most extensively studied in the context of internationally shared fisheries. Despite the legal obligation of States to cooperate within a Regional Fisheries Management Organisation (RFMO), States involved in international fisheries are not required to reach an agreement, or if an agreement is reached, it is not binding or enforceable (Munro et al. 2004). This sets non-cooperation to be the default option resulting from over-exploitation which is exacerbated in the case of international fisheries where many countries having divergent interests are involved, and where monitoring and management rules are notoriously difficult to enforce (Maguire et al. 2006; McWhinnie 2009; Cullis-Suzuki and Pauly 2010; Teh and Sumaila 2015). Understanding the strategic behavior of States in the collective decision-making process of international management bodies is critical (Munro et al. 2004; Fulton et al. 2011). Theoretical work based on game theory has offered important insights about the outcomes of non-cooperative harvests (seminal works of Munro 1979; Levhari and Mirman 1980; Clark 1980 among others) and the gap to fill before reaching a conservative and cooperative agreement in the context of international fisheries (Bailey et al. 2010; Hannesson 2011; Pintassilgo et al. 2015 for an overview). A key message that emerges from this literature is that the prisoner’s dilemma outcome persists and self-enforcing cooperative agreements are generally difficult to achieve because of the dynamic incentives to overharvest for fishers. However, much of this work has relied on the assumption of perfect information and excludes complex resource dynamics (e.g. non-linearities and multiple stable states) or potential shifts of the economic or natural environment (Bailey et al. 2010; Hannesson 2011).
Along with the theoretical development, economic experiments provide a means of evaluating strategic behavior in different institutional settings under controlled conditions by comparing direct observations with theoretical outcomes. Experimental research on CPR dilemmas has focused on repeated static ecological environments by focusing on the institutional aspects altering the strategic uncertainty (‘’social uncertainty’’ defined by Messick et al. 1988). Field and laboratory experiments have accumulated evidence that small groups of individuals could manage CPRs efficiently if they have the ability to communicate on a face-to-face basis, the autonomy to establish rules allocating rights and duties, and the capability to monitor and punish one another (overview in Ostrom 2006 and Poteete et al. 2010). This strand of literature has focused on small scale CPRs and disregarded large scale CPRs, such as international fisheries, where reaching agreements, monitoring, and enforcing rules are critical (Walker et al. 2000). Furthermore, the initial protocols have overlooked the dynamics of the social-ecological system in the resolution of CPR dilemmas, which have been considered only recently (e.g. Janssen 2010; Cardenas et al. 2013).
Large, sudden, and potentially persistent changes in the ecosystem dynamics have been extensively documented (e.g. Folke et al. 2004; Biggs et al. 2012 and the regime shift database http://www.regimeshifts.org). If the resilience of the system is eroded, trespassing on a tipping point can dramatically change the structure of a marine community for example, sometimes with irreversible impacts (hysteresis effects) on the productivity of the targeted species (e.g. the collapse of the North West Atlantic Cod Hutchings and Myers 1994; McCain et al. 2015). Social-ecological systems and public opinion display the same kind of dynamics with critical transitions (Scheffer 2009). Management systems can switch swiftly from a low to a high action level to deal with complex problems (e.g. the management of a common-pool resource) with new management frameworks and paradigms beyond a critical threshold (e.g. below some natural resource stock level, Scheffer et al. 2003).
This paper is inspired and motivated by the case of East Atlantic bluefin tuna (EABFT) international fishery discussed in other studies (Brasão et al. 2000). Awareness of public opinion by non-governmental organizations (NGO) played a major role in the shift of the management system of this highly migratory species (Fromentin et al. 2014). The threat of an economic sanction, namely a ban on foreign trade resulting from NGOs campaigns, triggered a shift in the management decisions adopted by the International Commission for the Conservation of Atlantic Tunas (ICCAT), thus reducing total annual catches from approximately 50,000 t between 1998 and 2007, to 10,000 t in 2010 consistent with the scientific advice (ICCAT 2012).
Our objective is to analyze how states, sharing a CPR, can coordinate their decisions when facing the threat of economic sanctions. In the present study, we rely on an experimental method to appraise the cooperation level in response to the introduction of endogenous tipping points. We performed a framed laboratory experiment mimicking the EABFT international fishery management context following the stylized representation of Brasão et al. (2000). We examine the strategic interaction between individuals in the context of non-cooperative game theory in which cooperation could be sustained by a trigger strategy. To this end, we limited communication to a non-binding pledge representing the difficulty to reach and agreements and enforce rules in the context of international fisheries. We compared three experimental treatments in which each subject played a dynamic CPR game by defining its own quotas as a State involved in the fishery. In the different experimental treatments, some groups faced a simple dynamic system while other groups faced tipping point triggering an economic sanction over all subjects. In the latter, some groups faced a situation where the tipping point was known, whereas the others faced a situation of uncertainty about the location of the tipping point. The threat of an economic sanction considered in this study is latent and endogenously driven, i.e. triggered by collective actions (aggregated catches).
Our experimental results show that the threat of an economic sanction fosters more cooperative behaviors, less over-exploitation, and more precautionary management of the resource reducing the dissipation of economic rents. This result is enhanced when the location of the tipping point that triggers the economic sanction is uncertain.
2 Review of Literature
The bulk of the experimental work on CPR dilemmas starts from the CPR baseline game of Ostrom et al. (1994). They formulated a game as static framework, which is not appropriate to represent the negative externalities associated with the dynamic patterns of natural stocks. The future exploitation of a fish stock depends on past exploitation levels. Consequently, the resource management problem must be set in a dynamic optimization context, making the task of achieving an optimal Pareto solution more complex.
This intuition has been confirmed in the case of a resource harvested under sole ownership (Moxnes 1998; Hey et al. 2009). Walker and Gardner (1992) extended the CPR baseline game by including path dependence and demonstrated that the sustainability of the resource is no longer maintained when the probability of resource exhaustion is linked to past harvest levels. In addition, earlier depletion of the resource is clearly linked with the uncertainty level (Botelho et al. 2014). A later work of Osés-Eraso et al. (2008) modified this game by implementing a finite-horizon super-game, in which the extinction of the resource is a real threat. They found that the likelihood of extinction is linked to whether the scarcity of the resource is exogenous or endogenous, but early extinctions occurred irrespective of the initial scarcity of the resource. Other experimental works have been conducted by Herr et al. (1997) and Mason and Phillips (1997), setting participants as harvesters in a complex dynamic situation. Their current decision did not influence the probability of destruction but changed the state of the resource and economic opportunities. Both studies concluded that the individuals did not internalize future increased costs following the depletion of the resource and that the lack of cooperation is exacerbated when time-dependency is included in CPR dilemmas.
Another kind of dynamic experiment has been developed by Fischer et al. (2004), introducing the resource stock size into an intergenerational CPR game where the scarcity of the resource depends on the harvesting behavior of past generations. Although the size of the resource is common knowledge, individuals are unable to infer the actual level of scarcity and no correlation has been found between the resource stock size and the decisions adopted by the individuals.
While most research works assumed that the size and productivity of the resource are accurately known, the effects of environmental uncertainties have been introduced by repeated single-trial experiments (seminal works of Rapoport et al. 1992 and Budescu et al. 1995). In these experiments defined as threshold public goods experiments (overview in Chaudhuri 2011), individuals can harvest any amount of the CPR whose size parameters were randomly selected from known uniform probability distributions, but they receive a null payoff if the total quantity claimed exceeds the resource size (threshold). This strand of literature has demonstrated that higher uncertainty leads individuals to increase their appropriation of the shared resource significantly. More recently, public good games have also been studied in the frame of international climate negotiation to avoid catastrophic climate change in which uncertainty about the location of the threshold fostered the prisoners’ dilemma outcome (e.g. Barrett and Dannenberg 2012, 2014).
Complexity in the description of the social-ecological system has been introduced recently by combining spatial and temporal dimensions jointly (Moreno-Sánchez and Maldonado 2010; Janssen 2010; Castillo et al. 2011; Cardenas et al. 2013; Emery et al. 2015a, b). Very few studies analyzed the consequences of regime shift in either the resource dynamics or the economic environment. Lindahl et al. (2016) showed that a user group manages a resource more efficiently when confronted with a latent abrupt change in the renewal rate of resources. Their analysis focused on communication, and demonstrated that the threat of reaching a critical tipping point triggers more effective communication within the group, enabling stronger commitment and an increase in efficiency despite the higher complexity. Schill et al. (2015) extended these results by introducing a risk to harvesting a resource with a probable threshold. They found that the threshold impact is observed only in situations where the likelihood of the latent shift is certain or high.
We contribute to this literature by exploring the effect of a tipping point affecting the economic conditions of the CPR dynamic game in which an individual’s decisions are based on economic outcomes. In addition, we go further by analyzing how uncertainty about the location of the tipping point, instead of its likelihood, affects decisions upon quotas.
3 Experimental Setting
3.1 Experimental Design
Research questions are tested using a modified version of the experimental design of Mason and Phillips (1997). This protocol defines a CPR request game (Budescu et al. 1995) in which a few firms harvest a resource in a dynamic context. We adapt their oligopoly model to a situation where the price is exogenously determined (constant price) and include a critical tipping point in the resource level which affects the economic conditions of the game. Following the methodology used in other complex ecological dynamic experiments (Schill et al. 2015; Lindahl et al. 2016), we introduce a non-neutral framework. According to the classification of Harrison and List (2004), this experiment falls within the category of “framed laboratory experiment”. The task and information given to subjects correspond to a stylised representation of the actual context of the ICCAT decision committee. The subjects are asked to define their harvest levels (quotas) for the East stock of Atlantic Bluefin. Subjects are only able to communicate through a non-binding pledge process: face to face communication is not allowed.Footnote 1 Moreover, to approximate an infinite time horizon super-game, the subjects do not know the number of rounds (years) to be playedFootnote 2; they only know the maximum duration. However, we make sure to end the experiment early enough to avoid potential end game effects.
We align our experiment onto the model of Hannesson (1997). The CPR biomass dynamics is modeled by a logistic growth (1) subject to harvest (Yt) in year t.
With Bt the biomass and G(Bt) is the discrete rounded version of the logistic growth model \(\left( {G\left( {B_{t} } \right) = \left[ {B_{t} \left[ {1 + r\left( {1 - \frac{{B_{t} }}{K}} \right)} \right]} \right]} \right)\) presented to our subjects for simplicity. With r and K are the growth rate and the carrying capacity parameters respectively (Table 1)
We assume that the marginal cost of fishing (c, Table 1) is inversely proportional to the size of the stock at any point in time.Footnote 3 The total cost depending on biomass (C(Bt)) in period t will then be:
At a given constant price (p, Table 1), the total profit (\(\pi_{t}\)) obtained by all subjects (i) in period t with a fixed cost (\(\alpha\), Table 1) associated with an endogenous resource threshold Blim will be:
With N the number of participants, and assuming constant return to scale, the individual profit is
With y the individual harvest level of subject (i).
We introduce a fixed cost related to the resource size beyond the threshold level, Blim referring to the biomass limit reference points (FAO 1995), which corresponds to the stock size below which the recruitment has a high risk to be impaired and the stock is in danger of collapsing. This cost is a stylized representation of the critical effect of resource depletion. In the case of the EABFT fishery, this cost represents the effect of a ban on foreign trade. This fixed cost formulation follows the assumption of public good games with potential catastrophic effects from climate shifts (Milinski et al. 2008; Barrett and Dannenberg 2012, 2014).
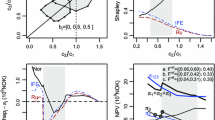
We introduce the resource growth model as discrete function to our subjects (Fig. 1) and the associated profit evolution as depending on the stock and catch levels (Fig. 2) for a selection of parameters that fit the context of EABFT (stylised version, Table 1). The minimum resource size allowing for reproduction is 3 units (1 unit is equivalent to 104 tons) and the maximum resource size is set to 70 units. The maximum sustainable yield (MSY) is 3 units for a stock size between 28 and 42 units. The profit is maximum, greater than 100 units (1 monetary unit is equivalent to 107 €), when both the growth of the stock and catch levels are maximum, then it steadily decreases until the stock reaches the lowest values and becomes null at any catch level for a stock size of 10 units. In all treatments, the groups start with a stock size of 52 units and over a number of periods unknown to them, they harvest resource units restricted by an individual capacity constraint of 5 units (yi,t = [0, 1, 2, 3, 4, 5]). Groups are composed of 3 subjects sharing the same characteristics. This design follows the stylised representation from a game theory model of the EABFT fishery (Brasão et al. 2000).

Logistic resource growth (104 tons)

Profit (107 €) as a function of stock (104 tons) and harvest level (104 tons)
We introduce three experimental treatments to assess the cooperation in response to the introduction of three kinds of endogenous economic tipping points: (1) base case without tipping point; (2) known tipping point and (3) uncertain (location) tipping point. In all three experimental treatments (T0, T1 and T2 in Table 2), a group of subjects defines a catch harvest for their own EABFT fishery. The only aspects that differ between treatments are the nature of the threshold (Blim). The uncertainty surrounding the latent endogenous shift differs from the risk evaluated by Schill et al. (2015). In our case the uncertainty focuses on the position of the threshold, and not on its existence. The third treatment (T2) introduces uncertainty around the position of the threshold value Blim which is drawn within a 40% uniform uncertainty range [\(B_{lim}^{min}\), \(B_{lim}^{max}\)] centered around the value of Blim.Footnote 4
3.2 Experimental Procedure
The experiment was conducted at the experimental laboratory of the University of Montpellier (LEEM) with a total of 51 subjects coming from the undergraduate student population in May 2017. The experiment was conducted through a computer-based approach realized with the oTree software (Chen et al. 2016). Each experimental session lasted a maximum of two hours with two repetitions of the game for the same group of subjects (phases). Participants received a show-up fee of 6 € and the average earnings during the experiments were 2.94 €, paid privately at the end of the experiment (see supplementary material Appendix A for a flow chart of experimental steps).
When the subjects arrived, they signed a consent form and were randomly assigned to a group of 3 subjects with the instructions to read (supplementary material Appendix B). They were told that each subject represented a country, and that together with the two other participants of their group, they had access to the stock of the East Atlantic bluefin tuna, a common renewable resource, from which they had to decide the amount of allowable harvest for their fishery at the beginning of each round (each year), before deciding privately in a further step what would be their own harvest decision. Subjects were told that the experiment would end either when the stock is depleted or when the experimenter decides to stop it, but the exact end-period was unknown to them. They began with a capital of 50 monetary units and were paid proportionally to their accumulated profit during the experiment with a rate of 1 unit equal to 0.05 € plus an additional revenue of 0.2 € for correct belief elicitation. Belief elicitation constitutes a guess of the expectation of other subjects’ behavior (harvest level). They received payment for only one phase of the experiment randomly chosen and unknown to them. No direct communication (face to face) between subjects was allowed.
Before the start of the experiment, the subjects were asked to fill out a form to inform their identity and if they were concerned or involved with the subject of the study (supplementary material Appendix C), and then they were tested for their understanding of the instructions, i.e. resource dynamics and profits (3 questions, supplementary material Appendix C). Any remaining question was answered by the experimenter. For each round, players received information about the resource state from which a profit table is derived and updated for every round (supplementary material Appendix D). They were also informed about the percentage variation of the biomass for the next year through a variation table depending on the harvest level of the group (supplementary material Appendix D). Furthermore, the mean resource level at MSY (35 units) was also indicated with the resource status and defined as a non-binding objective for the group. This information creates a collective reference point in order to facilitate the understanding of the long-term sustainable resource level maximizing the growth of the resource. Therefore, optimizing the use of the resource can focus on the mere level ensuring maximum profits. This information is necessary to concentrate the problem on the resource sharing issue, and not on the optimization of a non-linear dynamic system which proved to be a complex problem (Moxnes 1998; Hey et al. 2009).
On top of deciding their harvest level, the subjects had to guess the sum of harvest units they expected the other players would harvest in each period from 0 to 10 units. Belief elicitation was incentivized with a payoff of 0.2 € for good prediction and allowed examining the source of deviations from theoretical predictions. Thereafter, participants pledged an amount of catch they would harvest individually. It was common knowledge that these declarations were non-binding but would be communicated to the group. After these declarations were revealed, the participants chose simultaneously their actual harvest level for the round (year). At the end of the round, the participants were then informed about everyone’s decisions for the round and they were given their cumulated profit and the track records of the total catch, profit and own decision during the game. They also had access to a projection of the future resource status assuming a constant harvest level scenario defined at the current harvest level (supplementary material Appendix E). At the end of the experiment, participants were informed about their cumulated profit. They were also asked to indicate, on a five-point Likert scale, to what extent they understood the resource dynamics and the cooperation level of their group during the experiment.
3.3 Formulating Hypothesis
To formulate the research hypotheses, we rely on the analysis of an indefinite time horizon supergame made by Hannesson (1997). The subjects know that the game will end at some point but not when. At every round of the game, each subject i in the group has an individual perception about whether or not the game would last another round (sort of a discount factor), which we denote \(\delta_{i}\) (Fudenberg and Tirole 1998). The implication of these subjective probabilities defines the equilibrium conditions of the game.
During the experiment, participants receive updates on the stock level Bt and on their available profit at the beginning of each period. They also know if someone deviates from its proposition and if a participant behaves as a selfish agent. Thereby, each participant conditions her/his strategy on past and current resource and profit levels. On the basis of this information, each participant plays a Markov strategy (Maskin and Tirole 2001). Because players are symmetric (same cost functions), we only consider equal sharing equilibria (equal share of the resource) in which each subject gets \(\frac{1}{N}\) of the total profits of each period.
Cooperative strategy could be sustained by a trigger strategy in the game. Considering the case without tipping point, if one of the participants deviates from the optimal solution, she/he would gain more in the current period and would then be punished afterwards. Other players would retaliate by fishing down the stock in the following periods until further depletion becomes unprofitable. Such a scenario results in resource depletion until the marginal cost of fish caught (\(c\)) is equal to the marginal revenue, i.e. the fish price (p, Eq. 3). The size of the stock resulting from such a strategy (trigger) is then:
Otherwise, the optimal solution could be sustained as a Markov perfect strategy if the defection is not profitable. The net present value of the cooperative strategy \(NPV_{coop}\) for infinite horizon is:
With an initial stock of 52 units (104 tons), the optimal outcome is obtained by harvesting the stock until the optimal level Bopt is reached in the first period, each subject gaining \(\frac{{\pi_{0} }}{N}\). In each subsequent period, the group harvests the sustainable yields (G(Bt)) until the stock reaches its optimal size \(B_{opt}\) and each subject obtains \(\frac{{\pi_{opt} }}{N}\).
The net present value (\(NPV_{{non{-}coop}}\)) of the non-cooperative strategy is defined for a participant who deviates from the cooperative solution and which is then punished by all other participants playing non-cooperatively afterwards and forever.Footnote 5
In the first two periods, the defector gets the same profit as in the cooperative solution, as all other participants play cooperatively, and in addition the defector gets the profit of driving the stock down unilaterally to the deviation level Bdev\(({\text{and}}\;{\text{get}}\;\pi_{dev} )\). In the third and all later periods, he will be punished by all other agents playing non-cooperatively, driving the stock down from Bdev to the trigger strategy level \(B_{trig}\) (10 units) and gets the profit from the punishment \(\frac{{\pi_{pun} }}{N}\). Then, the defector gets only the profit obtained in the non-cooperative solution by harvesting the trigger biomass level Btigr and obtaining the profit \(\frac{{\pi_{trig} }}{N}\).
The trigger strategy forms a subgame perfect equilibrium, if the defection is not profitable, \(NPV_{coop} > NPV_{non{-}coop}\),Footnote 6 which gives the condition:
As \(\delta\) tends to 1 (i.e. the discount rate tends to 0) meaning a higher preference for future, defection will never be profitable (by definition Eq. 7 becomes \(\pi_{opt} > \pi_{trig}\), see supplementary material Appendix F for the relationship between Bopt and \(\delta\)). In other words, the loss from punishment will always outweigh the gains from defecting. As \(\delta\) becomes inferior to 1, the temporary gains from defecting may outweigh the long term profit of playing cooperatively. Moreover, the temptation of defecting decreases with higher fishing costs. A higher cost of fishing (c) increases the likelihood of a cooperative solution (the demonstration can be found in Hannesson 1997).
The introduction of a fixed cost triggered by fishing down the stock below the threshold Blim changes the size of the stock resulting from non-cooperative strategy Btrig from a level where further depletion becomes unprofitable (since the marginal cost of fish caught is equal to the price) to the level of the threshold Blim which is by definition superior to Btrig (Btrig = c/p). Consequently, the gains from the cooperative solution relatively to the non-cooperative solution become smaller and for low discount values the cooperative and non-cooperative solutions coalesce.
Following this rationale, one can find the critical value of the discount factor \(\hat{\delta }\) to sustain the cooperative solution. The critical value of the discount factor (\(\hat{\delta }\)) is higher when the threshold Blim is introduced (Eq. 7, see supplementary materials Appendix G) therefore the incentives to deviate from the cooperative solution is higher leading to our first hypothesis:
Hypothesis 1
We expect less cooperation when a tipping point is introduced (T1 and T2).
We analyze the level of cooperation through the stock size left after exploitation. A stock size below the optimal level (Bopt) indicates an over-exploitation driven by non-cooperative behaviors. We also introduce a proxy of non-cooperative behaviors, the ratio between the harvest decision (yi,t) and the myopic harvest strategy \(y^{e} \left( B \right)\) determined as a function of the stock size (see supplementary material Appendix H for a description of the myopic harvest strategy \(y^{e} \left( B \right)\)). A value equal to 1 indicates that the participant chose to play as a selfish harvester maximizing her/his current payoff,Footnote 7 whereas a value inferior to 1 indicates that the participant intended to cooperate.
Now turn to the case where the position of the threshold is uncertain. Considering risk-neutral players, the problem facing by each subject is now:
In front of ambiguous situation, the size of the stock resulting from non-cooperative strategy (where further depletion becomes unprofitable) becomes superior to Blim when an uncertain tipping point is introduced (T2). Following the same rationale as for defining hypothesis 1, the gains from the cooperative solution relatively to the non-cooperative solution become smaller and lead to our second hypothesis:
Hypothesis 2
We expect less cooperation in T2 than in the known threshold position treatment T1.
3.4 Statistical Analysis
We first compare means and proportions across the treatments of main variables (Table 3). We used respectively the non-parametric Kruskal–Wallis and a Pearson’s Chi square tests for comparisons of means and proportions (Table 4). All reported p values are two-sided and we only consider the first 15 rounds of the game for our analysis.
Then we analyze pledges and players’ beliefs by classifying subjects according to their ability during the experiment to predict other player’s behavior (belief elicitation) and their intentions to follow or not the pre-agreements during the game (i.e. pledges before harvest decisions). We define 3 types of subjects based on their mean prediction, beliefs errors: optimistic (belief < others harvest), realistic (belief = others harvest) and pessimistic (belief > others harvest). We also define 3 types of subject’s behavior according to their mean responses (harvest decisions) to others’ pledge: altruistic (harvest decision < pledges/(N − 1)), consensual (harvest decision = pledges/(N − 1)) and free-rider (harvest decision > pledges/(N − 1)). The subject type (Table 3) is a classification of subjects based on their highest frequency belief errors (optimistic, realistic or pessimistic) and intended harvest behaviors (free-rider, consensual or altruistic).
Finally, the experimental data, are analyzed with a population average generalized estimating equation model (GEE, developed by Zeger and Liang 1986) with the ‘‘geepack’’ library (Halekoh et al. 2006) available in the programming language R (R Core Team 2016). The GEE model approach is an extension of the Generalized Linear Model (GLM). It provides a semi-parametric approach to longitudinal data analysis. Longitudinal data refers to non-independent variables derived from repeated measurements. We measure repeated decisions of participants which are correlated from one period to another. The GEE model allows an analysis of the average response of a group, i.e. the average probability of making a myopic harvest decision given the changes in experimental conditions, accounting for within-player non-independence of observations. The decision of a participant in year t + 1 is linked to his decision in year t, thus violating the hypothesis of independence of the observations formulated in the classical regression methods. For controlling group dependences which occur through resource stock and social effects, we performed the same GEE analysis on the average group ratio of harvest decisions over myopic strategies. In this model, we consider that a correlation of the mean group in period t + 1 is linked to the decisions in period t.
The modeling approach also requires a correlation structure, although this methodology is robust to a poor specification of the correlation structure (Diggle et al. 2002). Our dataset consists of a series of successive catch decisions made by a participant during each phase. The grouping variable of the observations is therefore based on each experiment. Since the data is temporally organized, a self-regressive correlation structure (AR-1) is selected. Model selection is performed by testing combinations of the covariables (R package MuMIn, Barton 2014) based on Pan’s quasi-likelihood information criterion (QIC, Pan 2001) and individual Wald test.
We focus our analysis on the ratio of the harvest decision and the myopic harvest strategy. This variable, which is a proportion that can be modeled by a binomial distribution with a logit link function, specifying a variance of the form: var(Yi,t) = pi,t·(1 − pi,t), with Yi,t = \(\frac{{y_{i,t} }}{{y^{e} \left( B \right)}}\) corresponding to the response variable for participant i during period t and pi,t the probability of the expected value of Yi,t(E[Yi,t] = pi,t). As for the logistic regressions, we tested for specification errors, goodness-of-fit, multicollinearity as well as for influential observations.
4 Results
4.1 Overall Exploitation Management Decision Patterns
We found significant differences between treatments (Table 4). First, the threshold treatment groups (T1, T2) cooperated more on average, participants used significantly less myopic strategies and groups depleted significantly less the resource (higher average stocks). The groups playing in the T1–T2 treatments which exceeded the threshold, experienced an important cost that reduced drastically their profit. We therefore observed a lower average profit with a higher variability between groups. Furthermore, we observed an effect of uncertainty around the threshold (T2). Groups who experienced threshold ncertainty cooperated more if we consider the mean ratio of harvest decision on the myopic strategy and the mean resource level. However, the proportion of groups exceeding the threshold was higher than in the first treatment (T1).Footnote 8
The overall catch decreasing pattern until the steady state stock size corresponding to the trigger strategy was found similar between groups in the treatment without a threshold (T0, Fig. 3). All groups in the treatment T0 followed the trigger strategy and exploited the resource until the non-cooperative equilibrium (Btrig of 10 units). Only in 3 experiments over 34, the biomass level was managed close to its long-term optimal level (40 units), for which the regeneration rate was the highest and the harvesting cost was low. They all belong to the treatments groups (one in T1 and two in T2).

Time series of resource stock size (biomass in units) by treatments (T0, T1 and T2). The grey dashed line corresponds to the threshold Blim in T1 and the shaded area to the uncertainty range around the potential value of Blim in T2
In contrast with our theoretical prediction, the majority of groups (7) in the certain thresholds treatments (T1) harvested beyond the threshold. None of these groups was able to reverse the negative trend of stock depletion despite the high penalty cost. We observed the same pattern in the uncertain threshold treatment (T2) with 7 cases of exploitation falling beyond the threshold level. Moreover, despite the high cost related to the full depletion of stocks, two groups have intentionally exhausted the resource to end the experiment.
We observed a lower proportion of myopic strategies in the threshold treatments (T1 and T2) which contradict the theoretical predictions (Fig. 4). Moreover, we noticed more cooperation (i.e. a lower proportion of myopic strategies) in the uncertain threshold treatment than under other experimental conditions (Table 3). We also clearly discern a time pattern linked with the scarcity of the resource regardless of the treatment.

Proportion of harvest as a fraction of myopic strategy overtimes by treatments (T0, T1 and T2) summarized into a categorical variable: ‘Myopic’ if the ratio of the harvest choice over the myopic strategy is larger or equal to 1 and ‘NonMyopic’ if the ratio is smaller to 1
To go further into the analysis of individual strategies, we observed that the high mean harvest level (Myopic behavior, Fig. 5) in T0 during the first rounds (0–8) led the stock to Btrig (10 units) and decreased profits to zero as a result of the application of the trigger strategy. Participants’ announcements (pledges) and harvest decisions were helpful to understand the start of the trigger strategy (punishment of free-riders by overexploiting the stock until further depletion becomes unprofitable). During the first rounds in which we observed the highest mean harvest decision, participant’s pledges were strictly inferior to harvests driving participants into intended free-riding behavior (intended behavior > 0). On the other hand, mean participants’ beliefs were too optimistic: they expected other players to harvest less than their announcements (belief error < 0). Threshold treatments exhibited the same pattern with a less marked trend in free-riding intended behaviors and prediction of other participants’ harvests. The classification into distinct subject types summarizes this information by showing the highest proportion of free-riders and optimistic participants in the experiments (Fig. 6). Likewise, this information highlights the high frequency of consensual participants which strengthens the theoretical hypothesis that participants use consensual punishment strategy.

Time series of mean harvest, pledge decisions and mean resulting resource stock size, profit, intended behavior and belief error by treatments (T0, T1 and T2)

Frequency of subject types for the whole experiments and by treatments (T0, T1 and T2). Classification of subjects based on their highest frequency belief errors (optimistic: belief < other harvests, realistic: belief = other harvests and pessimistic: belief > other harvests) and intended harvest behaviors (free-rider: harvest > pledges/(N − 1), consensual: harvest = pledges/(N − 1) and altruistic: harvest < pledges/(N − 1))
4.2 Exploring Predictors for Cooperation
The selected GEE regression model (Table 5)Footnote 9 reveals that groups playing the threshold treatment (T1 and T2, p < 0.001) are deemed more cooperative. On average, the odds, ceteris paribus, of behaving myopically in the no threshold treatment (T0) over the odds of behaving myopically in the threshold treatments (T1 or T2) is about 2.56 (inverse of the odds in Table 5). In terms of percentage of variation, the odds of behaving myopically among the no threshold treatment groups is around 156% higher than groups in the threshold treatment. The threat to trespass the threshold enhances cooperation by mitigating selfish behaviors.
We can also identify the effect of the resource scarcity on subjects mean harvest decisions. When subjects start experiencing scarcity, they significantly tend to select myopic decisions (biomass level effect, p < 0.001). Participants are stuck in short-sighted competitive behaviors. In all treatments, the proportion of myopic decisions increases by approximately a factor 3–4 between the first and the last rounds of the experiment (Fig. 4). This observation is confirmed by the average continuous decreasing trend of biomass throughout time (Fig. 3).
The subject type is also an important explanatory variable which is defined by the ability of participants during the experiment to predict other players’ behaviors (belief error) and their intentions to follow or not the agreement contracted during the game (intended behavior, Table 3). The presence of free-riding participants significantly affects the mean odds of choosing myopic strategies. Those participants who deliberately deviated from the other pledges (catch > pledge/2) selected on average more myopic strategies than other players and led to stock depletion with the implementation of the punishment (trigger) strategy. Furthermore, the significant positive coefficient of realistic and consensual participants confirms our previous analysis that participants use consensually a punishment strategy.
5 Discussion and Conclusion
This article studies the effects of an endogenously driven catastrophic change in the economic conditions, on the management of a CPR, the EABFT international fishery. We showed empirically that the threat of economic sanctions significantly increases the likelihood of observing coordinated actions and decreases free-riding behaviors. International fishery agreements are rarely self-enforcing, and competition between states often results in stock overexploitation and rent dissipation (Munro 2007). Our experiment which reproduces a stylized representation of the decision-making process of ICCAT suggests, that states facing an endogenously driven catastrophic change would propose a collective target, in terms of total allowable catch, to avoid an economic collapse. This situation is close to the context of the threat of foreign trade ban which was envisaged in 2009, thus jeopardizing the future of the EABFT fishery, and has finally resulted in a coordinated decrease of quotas decided by the fishing countries.
Scientists have endeavored to support RFMO management by identifying key target and limit reference points such as the Maximum Sustainable Yield (MSY) or the biomass limit to guide the collective management decisions of states involved in international fisheries (Caddy and Mahon 1995; FAO 1995; de Bruyn et al. 2013), which are inherently uncertain (Francis and Shotton 1997). Our research suggests that introducing economic sanctions such as trade restrictions associated with biological limit reference points would discipline free-riding behaviors and foster the emergence of self-enforcing agreements.
The influence of a tipping point on resource exploitation observed in this study strengthens previous observations by Schill et al. (2015) and Lindahl et al. (2016). In such a dynamic CPR experiment designs, which introduced the resource dynamics, the focal point represented by the cooperative solution changes over time and is path-dependent. The incentive to deviate from a past agreement increases over time as the probability of a game continuation decreases. Such conditions make cooperation and coordination more unlikely. This has been demonstrated experimentally by Mason and Phillips (1997) when comparing static and dynamic designs. In our experiment, which is set as a non-cooperative game allowing communication only through a non-binding pledge process, the introduction of a tipping point drastically changes the outcomes from systematic overexploitation following the use of a trigger strategy toward cooperative outcomes with a self-enforcing agreement. Nonetheless, whereas uncertainty around the existence or the location of tipping point fosters cooperation in CPR dilemma (Polasky et al. 2011; Schill et al. 2015), it impedes the collective contribution in a public good game (Barrett and Dannenberg 2012, 2014). The implications of potential regime shifts also depend on whether the shift is triggered by an individual’s decision or whether it would happen due to external forces (exogenous). In the latter case, if an individuals’ decisions have no impact on the likelihood of a catastrophic event, they will secure their earnings by harvesting more aggressively (Polasky et al. 2011).
In contradiction to our theoretical expectations, the introduction of a tipping point and addition of uncertainty around the location of the tipping point influenced exploitation strategies by enhancing instead of decreasing cooperation. Deviations from predictions in uncertain decision problems are well known. From empirical evidence, we know that in complex and uncertain decision problems (as used in our experiment), the assumptions underpinning the expected utility theory are questionable (e.g. Tversky and Kahneman 1974). Individuals typically deviate from expected utility maximization and rely instead on heuristics (Moxnes 1998; Hey et al. 2009). Deviations from theoretical predictions have also been observed when a group managing a CPR faces different probability levels regarding the existence of a tipping point (Schill et al. 2015).
In this study, we found a clear trend of non-cooperative (myopic) strategies over time regardless of the treatment which could be correlated to the scarcity of the resource. Subjects are prone to competitive and more intensive fishing behavior when the resource becomes scarcer. More surprisingly, the higher cost of exceeding the threshold does not affect this pattern. This result confirms previous findings by Osés-Eraso et al. (2008). They have observed that users responded to scarcity with caution by observing harvest levels directly but were nevertheless not able to avoid resource extinction. If we directly observed the harvest instead of the ratio between harvest and the myopic harvest level, subjects would have decreased their catch levels. However, the latter does not represent a good indicator of the cooperation level. When the situation becomes more competitive with fewer natural resources to share, participants’ behaviors seem to be driven by myopic strategies.
Although the introduction of an endogenous tipping point improved group coordination, very few groups (3 cases over 34) were able to maintain the biomass level close to the long-term optimal level (40 units) in our experiment. The complexity and the highly competitive feature of the experiment do not allow an agreement to emerge efficiently with only the threat of using a trigger strategy. Communication that has been reduced to pledges in this experiment is a key factor in achieving agreement to cooperate in CPR settings (Ostrom 2006). Face-to-face communication has been identified as the trigger for group agreement in dynamic CPR experiments (Schill et al. 2015; Lindahl et al. 2016). Nonetheless, we have left the study of cooperative management of CPRs involving communication for future work. Previous theoretical works based on game theory have focused on the formation of international fisheries agreements through coalition games that rely on coalitions, showing how the benefits of cooperation are allocated to each state involved in the coalition (Pintassilgo et al. 2015). Only a few experimental works have undertaken the study of formal sharing institutionally agreements such as voting to gain agreement in large CPR settings (Walker et al. 2000; Margreiter et al. 2005).
It is worthwhile noting that our results stem from laboratory experiments with students as subjects. The results would require external validation in the real context of regional fishery management organizations, and a next step would be for example to replicate this experience at the ICCAT Commission with actual policymakers. Furthermore, several dimensions other than the payoff derived from harvesting fish could be added individuals’ objectives. States are willing to maximize yield and employment or to include non-market values. Overlooking all the variety of objectives could have been one of the reasons for the failures of sustainable fisheries management (Hilborn 2007). Few studies have analyzed the role of different payoffs on cooperation (e.g. Pintassilgo et al. 2018; Mullon and Mullon 2018). However, merely accounting for new dimensions in the objectives of the states involved in international fisheries is not sufficient to overcome the trap of non-cooperation (Pintassilgo et al. 2018). Increasing the group size and integrating asymmetry between individuals may also have been a factor inhibiting the ability of groups to coordinate even in the presence of an endogenous tipping point. While group size has been identified as a critical factor affecting the success of cooperation in international fisheries, asymmetry between individuals has no clear effect on cooperation depending on the setting and the definition of asymmetry, which can be related to unequal interests, objectives, costs or information (Hannesson 2011; Pintassilgo et al. 2015).
Notes
The experimental design we use in this paper can be regarded as providing a limiting case where transaction costs linking to communication are prohibitively costly rendering the difficulties to reach an agreement within Regional Fisheries Management Organisation (RFMO) such as ICCAT.
As in Lindahl et al. (2016), to ensure an unknown time horizon, we varied the end-time between and within groups.
This cost function implicitly assumes that the cost per unit of fishing effort is constant and the catch per unit of effort is proportional to the size of the exploited stock.
A 40% uniform uncertainty range was selected to represent a high uncertainty level around the position of Blim.
Punishment strategies may last a finite number of periods. As we are interested in the effects of increasing the fishing through the introduction of a tipping point we keep simple strategies.
A more general way to describe the conditions for cooperation can be defined following the logic of Mason and Phillips (1997). Consider a cooperative harvest function, \({\text{y}}_{coop} \left( {B_{t} } \right)\), a trigger strategy can be described by playing cooperatively \({\text{y}}_{coop} \left( {B_{t} } \right)\), as long as no one has defected. If one of the participants deviates from the optimal solution, then others will punish him by fishing down the stock with harvest \({\text{y}}_{dev} \left( {B_{t} } \right)\), afterwards and forever. Using the cooperative harvest and resulting stock path, we may derive the net present value for the player under cooperation \({\text{NPV}}_{coop} \left( {B_{t} } \right)\). Similarly, we may calculate the non-cooperative value function, \({\text{NPV}}_{dev} \left( {B_{t} } \right)\). The trigger strategy forms a subgame perfect equilibrium if the defection is not profitable, irrespective of the current state.
$${\text{NPV}}_{coop} \left( {B_{t} } \right) > \pi_{dev} \left( {y_{dev} \left( {B_{t} } \right)} \right) + \delta NPV_{dev} \left( {B_{t} } \right)$$Myopic behavior constitutes a focal point distinguishable as the symmetric harvest decision which maximises the current payoff (diagonal in the payoff table in the supplementary material Appendix D).
We also test the potential effect of playing 2 games (phases) sequentially. We did not find any significant difference between phases using the Mann–Whitney–Wilcoxon test on group averages (supplementary material Appendix I).
We also compared GEE models to random group effect generalised linear models (GLMM with package ‘lme4’ Bates et al. 2015 in R, supplementary material Appendix J). The results are qualitatively similar with a higher magnitude of treatment and free-rider participant coefficients.
References
Bailey M, Sumaila RU, Lindroos M (2010) Application of game theory to fisheries over three decades. Fish Res 102(1):1–8
Barrett S, Dannenberg A (2012) Climate negotiations under scientific uncertainty. Proc Natl Acad Sci 109(43):17372–17376
Barrett S, Dannenberg A (2014) Sensitivity of collective action to uncertainty about climate tipping points. Nat Clim Change 4(1):36–39
Barton K (2014) Package ‘MuMIn’: multi-model inference. R package. Version 1.9. 13
Bates D, Maechler M, Bolker B, Walker S (2015) Fitting linear mixed-effects models using lme4. J Stat Softw 67(1):1–48
Biggs R, Blenckner T, Folke C, Gordon L, Norstrom A, Nystrom M, Peterson G (2012) Regime shifts. In: Hastings Gross L (ed) Sourcebook in theoretical ecology. University of California Press, Berkeley
Botelho A, Dinar A, Costa Pinto LM, Rapoport A (2014) Time and uncertainty in resource dilemmas: equilibrium solutions and experimental results. Exp Econ 17(4):649–672
Brasão A, Duarte CC, Cunha-E-Sá MA (2000) Managing the Northern Atlantic Bluefin Tuna fisheries: the stability of the UN fish stock agreement solution. Mar Resour Econ 15:341–360
Budescu DV, Rapoport A, Suleiman R (1995) Common-pool resource dilemmas under uncertainty: qualitative tests of equilibrium solutions. Games Econ Behav 10(1):171–201
Caddy JF, Mahon R (1995) Reference points for fisheries management. FAO Fisheries Technical Paper, 347, Rome, Italy, p 83
Cardenas JC, Janssen M, Bousquet F (2013) Dynamics of rules and resources: three new field experiments on water, forests and fisheries. In: List JA, Price MK (eds) Handbook on experimental economics and the environment. Edward Elgar Publishing, Cheltenham
Castillo D, Bousquet F, Janssen MA, Worrapimphong K, Cardenas JC (2011) Context matters to explain field experiments: results from Colombian and Thai fishing villages. Ecol Econ 70:1609–1620
Chaudhuri A (2011) Sustaining cooperation in laboratory public goods experiments: a selective survey of the literature. Exp Econ 14:47–83
Chen DL, Schonger M, Wickens C (2016) oTree: an open-source platform for laboratory, online, and field experiments. J Behav Exp Financ 9:88–97
Clark CW (1980) Restricted access to common-property fishery resources: a game-theoretic analysis. In: Liu PT (ed) Dynamic optimization and mathematical economics. Plenum, New York, pp 117–132
Cullis-Suzuki S, Pauly D (2010) Failing the high seas: a global evaluation of regional fisheries management organizations. Mar Policy 34:1036–1042
De Bruyn P, Murua H, Aranda M (2013) The precautionary approach to fisheries management: how this is taken into account by Tuna regional fisheries management organisations (RFMOs). Mar Policy 38:397–406
Diggle PJ, Heagerty P, Liang KY, Zeger SL (2002) Analysis of longitudinal data, 2nd edn. Oxford University Press, Oxford
Emery TJ, Tisdell J, Green BS, Hartmann K, Gardner C, León R (2015a) Experimental analysis of the use of fishery closures and cooperatives to reduce economic rent dissipation caused by assignment problems. ICES J Mar Sci 72(9):2650–2662
Emery TJ, Tisdell J, Green BS, Hartmann K, Gardner C, León R (2015b) An experimental analysis of assignment problems and economic rent dissipation in quota managed fisheries. Ocean Coast Manag 106:10–28
FAO (1995) Precautionary approach to capture fisheries and species introductions. Elaborated by the technical consultation on the precautionary approach to capture fisheries (Including species introductions). FAO technical guidelines for responsible fisheries, vol 2, pp 6–13. Lysekil, Sweden
Fischer ME, Irlenbusch B, Sadrieh A (2004) An intergenerational common-pool resource experiment. J Environ Econ Manag 48(2):811–836
Folke C, Carpenter S, Walker B, Scheffer M, Elmquist T, Gunderson L, Holling C (2004) Regime shifts, resilience, and biodiversity in ecosystem management. Annu Rev Ecol Evol Syst 35:557–581
Francis RICC, Shotton R (1997) Risk in fisheries management: a review. Can J Fish Aquat Sci 54:1699–1715
Fromentin JM, Bonhommeau S, Arrizabalaga H, Kell LT (2014) The spectre of uncertainty in management of exploited fish stocks: the illustrative case of Atlantic bluefin tuna. Mar Policy 47:8–14
Fudenberg D, Tirole J (1998) Game theory. MIT Press, Cambridge
Fulton EA, Smith AD, Smith DC, van Putten IE (2011) Human behavior: the key source of uncertainty in fisheries management. Fish Fish 12(1):2–17
Gordon HS (1954) The economic theory of a common-property resource: the fishery. Palgrave Macmillan, London, pp 178–203
Halekoh U, Højsgaard S, Yan J (2006) The R package geepack for generalized estimating equations. J Stat Softw 15(2):1–11
Hannesson R (1997) Fishing as a supergame. J Environ Econ Manag 32(3):309–322
Hannesson R (2011) Game theory and fisheries. Ann Rev Resour Econ 3(1):181–202
Hardin G (1968) The tragedy of the commons. Science 162(3859):1243–1248
Harrison GW, List JA (2004) Field experiments. J Econ Lit 42(4):1009–1055
Herr A, Gardner R, Walker JM (1997) An experimental study of time-independent and time-dependent externalities in the commons. Games Econ Behav 19(1):77–96
Hey JD, Neugebauer T, Sadrieh A (2009) An experimental analysis of optimal renewable resource management: the fishery. Environ Resour Econ 44(2):263–285
Hilborn R (2007) Defining success in fisheries and conflicts in objectives. Mar Policy 31(2):153–158
Hutchings JA, Myers RA (1994) What can be learned from the collapse of a renewable resource? Atlantic cod, Gadus morhua, of Newfoundland and Labrador. Can J Fish Aquat Sci 51:2126–2146
ICCAT (2012) Report of the 2012 Atlantic Bluefin tuna stock assessment session. Collect Vol Sci Pap 69(1):1–198
Janssen MA (2010) Introducing ecological dynamics into common-pool resource experiments. Ecol Soc 15(2):7
Levhari D, Mirman LJ (1980) The great fish war: an example using a dynamic Cournot-Nash solution. Bell J Econ 11:322–334
Lindahl T, Crépin AS, Schill C (2016) Potential disasters can turn the tragedy into success. Environ Resour Econ 65(3):657–676
Maguire JJ, Sissenwine M, Csirke J, Grainger R (2006) The state of world highly migratory, straddling and other high seas fish stocks, and associated species. Fisheries Technical Papers, 495, FAO, Rome
Margreiter M, Sutter M, Dittrich D (2005) Individual and collective choice and voting in common-pool resource problem with heterogeneous actors. Environ Resour Econ 32(2):241–271
Maskin E, Tirole J (2001) Markov perfect equilibrium: I. Obervable actions. J Econ Theory 100:191–219
Mason CF, Phillips OR (1997) Mitigating the tragedy of the commons through cooperation: an experimental evaluation. J Environ Econ Manag 34(2):148–172
McCain JSP, Cull DJ, Schneider DC, Lotze HK (2015) Long-term shift in coastal fish communities before and after the collapse of Atlantic cod (Gadus morhua). ICES J Mar Sci 73(5):1415–1426
McWhinnie SF (2009) The tragedy of the commons in international fisheries: an empirical investigation. J Environ Econ Manag 57:312–333
Messick DM, Allison ST, Samuelson CD (1988) Framing and communication effects on group members’ responses to environmental and social uncertainty. Appl Behav Econ 2:677–700
Milinski M, Sommerfeld RD, Krambeck HJ, Reed FA, Marotzke J (2008) The collective-risk social dilemma and the prevention of simulated dangerous climate change. Proc Natl Acad Sci 105(7):2291–2294
Moreno-Sánchez R, Maldonado JH (2010) Evaluating the role of co-management in improving governance of marine protected areas: an experimental approach in the Colombian Caribbean. Ecol Econ 69:2557–2567
Moxnes E (1998) Not only the tragedy of the commons: misperceptions of bioeconomics. Manag Sci 44(9):1234–1248
Mullon C, Mullon C (2018) A constraint-based framework to study competition and cooperation in fishing. Fish Res 203:74–83
Munro G (1979) The optimal management of transboundary renewable resources. Can J Econ 12(3):355–376
Munro G (2007) Internationally shared fish stocks, the high seas, and property rights in fisheries. Mar Resour Econ 22(4):425–443
Munro G, Van Houtte A, Willmann R (2004) The conservation and management of shared fish stocks: legal and economic aspects. FAO Fisheries Technical Paper No. 465, Rome
Osés-Eraso N, Udina F, Viladrich-Grau M (2008) Environmental versus human-induced scarcity in the commons: do they trigger the same response? Environ Resour Econ 40(4):529–550
Ostrom E (2006) The value-added of laboratory experiments for the study of institutions and common-pool resources. J Econ Behav Organ 61(2):149–163
Ostrom E, Gardner R, Walker J (1994) Rules, games, and common-pool resources. University of Michigan Press, Ann Arbor
Pan W (2001) Akaike’s information criterion in generalized estimating equations. Biometrics 57(1):120–125
Pauly D, Christensen V, Dalsgaard J, Froese R, Torres F (1998) Fishing down marine food webs. Science 279(5352):860–863
Pintassilgo P, Kronbak LG, Lindroos M (2015) International fisheries agreements: a game theoretical approach. Environ Resour Econ 62(4):689–709
Pintassilgo P, Laukkanen M, Grønbæk L, Lindroos M (2018) International fisheries agreements and non-consumptive values. Fish Res 203:46–54
Polasky S, de Zeeuw A, Wagener F (2011) Optimal management with potential regime shifts. J Environ Econ Manag 62(2):229–240
Poteete AR, Janssen MA, Ostrom E (2010) Working together: collective action, the commons, and multiple methods in practice. Princeton University Press, Princeton
Rapoport A, Budescu DV, Suleiman R, Weg E (1992) Social dilemmas with uniformly distributed resources. In: Liebrand W et al (eds) Social dilemmas: theoretical issues and research findings. Pergamon Press, Oxford, pp 43–57
Scheffer M (2009) Critical transitions in nature and society. Princeton University Press
Scheffer M, Westley F, Brock W (2003) Slow response of societies to new problems: causes and costs. Ecosystems 6(5):493–502
Schill C, Lindahl T, Crépin AS (2015) Collective action and the risk of ecosystem regime shifts: insights from a laboratory experiment. Ecol Soc 20(1):48
R Core Team (2016) R: a language and environment for statistical computing. R Foundation for Statistical Computing, Vienna, Austria. www.R-project.org. Retrieved Jan 2019
Teh L, Sumaila U (2015) Trends in global shared fisheries. Mar Ecol Prog Ser 530:243–254
Tversky A, Kahneman D (1974) Judgment under uncertainty: heuristics and biases. Science 185:1124–1131
Walker JM, Gardner R (1992) Probabilistic destruction of common-pool resources: experimental evidence. Econ J 102(414):1149–1161
Walker JM, Gardner R, Herr A, Ostrom E (2000) Collective choice in the commons: experimental results on proposed allocation rules and votes. Econ J 110(460):212–234
Worm B, Hilborn R, Baum JK, Branch TA, Collie JS, Costello C, Fogarty MJ, Fulton EJ, Jennings S, Jensen OP, Lotze H, Mace P, McClanahan T, Minto C, Palumbi S, Parma A, Ricard D, Rosenberg A, Watson R, Zeller D (2009) Rebuilding global fisheries. Science 325(5940):578–585
Zeger SL, Liang KY (1986) Longitudinal data analysis for discrete and continuous outcomes. Biometrics 42(1):121–130
Acknowledgements
We are thankful for valuable comments received from Marc Willinger, Stefano Farolfi, Dimitri Dubois, Nils Ferrand, Sander De Waard, members of the Laboratoire d’Economie Expérimentale de Montpellier (LEEM) working group and members of the IM2E Experiments on Uncertainty and Social Relations workshop. We thank Julien Lebranchu for his computer support, Dimitri Dubois for his experiment assistance and Anne-Catherine Gandrillon for her language corrections. We are also thankful for valuable comments received from two anonymous reviewers. P. Guillotreau and T. Vallée acknowledge the financial support of the French research ANR program CIGOEF (ANR-17-CE32-0008) and DOCKSIDE project, co-funded by the Erasmus Plus Programme of the European Union. Finally, we acknowledge the University of Nantes and IFREMER for the funding of a PhD. Last but not least, we would like to thank our experiment participants.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Jules, S., Sylvain, B., Patrice, G. et al. Can the Threat of Economic Sanctions Ensure the Sustainability of International Fisheries? An Experiment of a Dynamic Non-cooperative CPR Game with Uncertain Tipping Point. Environ Resource Econ 76, 153–176 (2020). https://doi.org/10.1007/s10640-020-00419-y
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10640-020-00419-y