
Abstract
Meta-heuristic algorithms, due to their high search speed and strong generalization ability, are frequently applied in programs mainly to discover the corresponding optimal strategy for any problem in view of their defined rules. After years of collision evolution, they have been continuously used to solve the complex, unordered and diverse optimization problems and improve efficiency. Aiming at the problems of low convergence accuracy and easy to fall into local optima of the traditional Harris hawks optimization algorithm, a compound improved Harris Hawks Optimization algorithm (CIHHO) is proposed. Firstly, the early circling exploration and later attack exploitation phase of the dynamic adjustment algorithm for environmental factors is introduced to regulate the energy of Harris hawks; Secondly, the concept of Versoria function is introduced to modify the random jump strength and raise the data grabbing ability of local space; Introducing the Levy flight function to adjust the factor and reduce the disturbance impact of Levy flight is beneficial for getting rid of the local space after entering the exploitation phase, and introducing random white noise to reduce step size and improve algorithm accuracy. Taking CEC 2017 test function suite set as the core, the performance of CIHHO algorithm is analyzed. Firstly, the performance of CIHHO algorithm is compared with HHO, HHO_JOS, LHHO, LMHHO and NCHHO. Secondly, the performance of unimodal function, multimodal function, mixed function and compound function is compared with other 7 improved algorithms. Finally, ablation experiments are carried out. The convergence value of the iterative curve obtained is more quantitative than the improved algorithm, The generality of the improved CIHHO algorithm in solving multiple optimization problems with different dimensions is verified. Further applying the CIHHO algorithm to three different engineering experiments, the minimum cost calculation results directly demonstrate that the CIHHO algorithm obtained has certain advantages in dealing with search space problems.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In two major areas of traditional machine learning and increasingly updating artificial intelligence, researchers have found that many real-world problems are often discrete, continuous, unconstrained or constrained, and it is often difficult to obtain high-quality results by using conventional mathematical programming methods. In this context, because of its simple process to save many complex steps in their operation process and easy to implement through code in application tools, meta-heuristics can efficiently solve many real-world problems with larger scale, multi-modal, discontinuous and non-differentiable, and the core operations of meta-heuristics do not depend on the mathematical characteristics of the target problem. After decades of development, meta-heuristics have gradually shown certain advantages in solving global optimization problems. Taking Particle Swarm Optimization algorithm as an example, Li et al. [1] proposed a design method PSO-GESN for growing echo state network ESN based on PSO and Singular value Decomposition (SVD). It was found in the experiment combined with further operation show that the used minimum singular value of the optimized network is significantly larger than that of the non-optimized network, which proves that the optimized network has better robustness. Nitin et al. [2] proposed to apply Genetic Algorithm (GA), Particle Swarm Optimization (PSO) and JAYA algorithm (JA) to determine the optimal parameters in the friction drilling process. The experiment found that the PSO could grab a more accurate target solution in the two parameters of surface roughness value and bushing length signal-to-noise ratio. Wenyi et al. [3] set up a more efficient improved PSO to model all of the ordered charging of electric vehicles. It was found that the ordered charging strategy based on improved PSO could obtain the lowest charging cost and power loss of the grid. Baoye et al. [4] applied the improved PSO combining adaptive fractional order to the smooth path structure planning problem of mobile robots. It was found in the experiment combined with further operation show that the used effective strategy is beneficial to the motion control of mobile robots, and can accurately calculate high-order continuous smooth paths with low computational cost. Ricardo et al. [5] proposed a spectral richness PSO algorithm SR-PSO, and found that the SR-PSO algorithm could produce lower variability in the case of sine wave signal x = 1. Ndunge et al. [6] used the Water Cycle Algorithm (WCA), Particle Swarm Optimization (PSO) as well as the hybrid high performance optimization algorithm of WCA and PSO to tune the STATCOM controller, and found that the STACOM tuned by WCA-PSO could produce the minimum voltage value, active and reactive power overshoot. Libin et al. [7] proposed an ensemble particle swarm optimization (EPSO) which combined three novel ensemble strategies. It was found in the experiment combined with further operation show that the used ensemble strategy has superior scalability. Donglin et al. [8] created an Improved Bare Bones Particle Swarm Optimization (IBPSO) algorithm to solve DNA double helix sequences design problems. Experiments direct proof that DNA double helix sequences designed by the created algorithm can reduce occurrence possible of two-level structure and reduce the value of h measure and coincidence degree combination constraint as much as possible. Among the algorithms proposed in recent years, Sparrow Search Algorithm (SSA) can get better results in dealing with most contemporary practical problems, and can ensure the superior stability efficiency of the algorithm. The proposal of Sparrow Search Algorithm also provides the possibility for many scholars to improve the algorithm. Wentao et al. [9] created a more efficient Sparrow Search Algorithm to improve the parameters of relevance Vector Machine (RVM) appropriately for predicting PV power. Relevant experiments after the introduction of engineering problems proved that the improvement strategy can obtain higher prediction accuracy and computational efficiency. Chenglong et al. [10] designed the chaotic sparrow search algorithm and applied it in the Random Configuration Network (SCN) to test the network regulation performance of CSSA-SCN. It was found in the experiment combined with further operation show that the used algorithm has better regression accuracy of root mean square error(RMSE), which was conducive to improving the regression accuracy and training efficiency of the algorithm SCN. Hao et al. [11] used the improved SSA (ISSA) to handle the fixed input frequency and apparent error of neuron nodes in hidden layer network of Fast Random Configuration Network (FSCN). It was found in the experiment combined with further operation show that the used ISSA-FSCN’s productivity is more stable than other sustainable network models during the most proper working time,general statistical average consumption time and relative worst output time, and has better classification performance. Zhen et al. [12] proposed to maximize use Discrete SSA (DSSA) to handle the general travel wholesalers and agents problem to obtain the optimal route and cost results. It was found in the experiment combined with further operation show that the used algorithm has strong competitiveness and robustness. Jiale et al. [13] proposed adaptive ISSA algorithm to dispose of the optimize structure of manipulator. It was found in the experiment combined with further operation indicated that the used ISSA significantly benefits the convergence speed, grab accuracy and stability of algorithm without adding any policy. Bin et al. [14] set up a more efficient multi-objective SSA (MOSSA) to dispose of complex multi-objective optimization problems (MOP). Relevant experiments after the introduction of complex problems proved that the Pareto front of MOSSA algorithm is superior to other algorithms, which proves that MOSSA has convergence competitiveness and diversity when solving MOP problems with equality and inequality constraints. Li et al. [15] proposed to combine the multi-objective SSA with active distribution network(ADN) to form a dynamic remodeling integrated optimization model. Experiments show that the proposed method effectively reduces functional loss and node voltage deviation.
Other algorithms also have certain advantages. Zhu et al. [16] set up a Human Memory Optimization (HMO) algorithm. Experiments show that the proposed algorithm can get smaller optimal value. Xueliang et al. [17] set up a more efficient improved grey wolf (IGWO) algorithm. With the continuous operation simulation experiment, the effective grey wolf algorithm applied to the standard pressure generated by the piezoresistive pressure sensor had a good consistency. Zhu et al. [18] created a JAYA algorithm on account of normal cloud and embedded it in the optimization problem of DNA double helix sequence design. Different from the JAYA algorithm proposed by Yujun [19], according to the conclusion of DNA experiments, the improved JAYA algorithm could directly control the secondary structure or hybridization in the process of DNA reaction to ensure the effectiveness and stability of DNA double helix sequence. Jiankai et al. [20] designed a more efficient improved dung beetle optimization algorithm on account of simulated population and embedded it in three well-known engineering mixed design problems commonly in real life. It was found in the experiment combined with further operation show that the used algorithm can handle relatively complex constraint problems more directly. Zhu et al. [21] set up a more efficient manta ray foraging optimization (MGLMRFO) algorithm. Experiments indicated that the circling search ability of the algorithm after adding strategy is universal and effective, and the use of MGL-MRFO algorithm in different environments can ensure adaptive learning ability and spatial adaptability to grab a reasonably feasible solution. Jiaxuan Xu et al. [22] proposed a novel scheme to Fuse both the global Structure and the local structure information for Ensemble Clustering (FSEC), and uses alternating direction method of multipliers (ADMM) to solve the objective function optimization problem. Relevant experiments after the introduction of the optimal structure of correlation function proved that the FSEC used is better than many of the most advanced ensemble clustering methods. Zhu Donglin et al. [23] set up a MEPSO algorithm. Experiments show that the proposed algorithm can get shorter UAV path. Lei et al. [24] proposed an ant colony optimization algorithm that combines greedy Levy mutation and applied it to 30 benchmark functions in CEC 2014. The experiment found that unlike non benchmark functions [25], the CLACO algorithm has different adaptability to benchmark functions at different threshold levels. In addition to the improved algorithms listed above, some improved woodpecker mating algorithms [26, 27] have also been applied to some extent and can achieve optimal results in practical problems.
Harris hawks optimization (HHO) algorithm is a swarm intelligence biological algorithm innovated by Heidari [28] et al. for biological development in real ecology, the algorithm is designed based on the natural activities of hawks. This paper analyzes the behaviors and strategies of Harris hawk when catching prey, implements the model with mathematical formulas and codes.
HHO algorithm can achieve more accurate and efficient results when used in most problems, but the algorithm itself also has the shortcomings of poor search performance and the local optimum is likely to be obtained in the later phase of optimization. In an effort to stabilize the efficiency of HHO algorithm, many scholars have made appropriate improvements. Shangbin et al. [29] proposed CSHHO algorithm using seven common chaotic mapping methods. It was found in the experiment combined with further operation show that the used algorithms are more stable than the original HHO algorithm. Helei et al. [30] proposed an improved HHOBM algorithm by introducing Brownian motion mutation. Relevant experiments after the introduction of the optimization problem proved that the proposed algorithm expands the local search area. Gupta et al. [31] set up a more efficient improved algorithm m-HHO by adding a new parameter controlling step size LF(D). Relevant experiments after the introduction of the optimization problem proved that the algorithm can reduce the disturbance to the population in the later iteration. Lemin et al. [32] proposed a hierarchical structure EHHO algorithm with fitness ranking. Experiments verify that the convergence efficiency of EHHO gradually increases. Gharehchopogh et al. [33] proposed 10 neighborhood search operators to stabilize the efficiency of HHO algorithm respectively, and compared with the improved selection function MCF, it was found in the experiment combined with further operation show that the used algorithm HHO-MCF is suitable for finding the best route. Pradeep et al. [34] set up a more efficient a new multi-objective non-dominated sorting HHO (NSHHO) algorithm. Experiments show that NSHHO can integrate the penalty term in the fitness function, reduce the fitness of the individual who violates the constraint, and obtain the best Pareto optimal solution. Jafar et al. [35] created a new HHO algorithm combined with directed simulation (DS) theory (DS-HHO). Relevant experiments after the introduction of the majorization problem proved that the algorithm can find the best scheme in complex and highly nonlinear optimization problems. The proposed hybrid enhanced chimp HHO algorithm has increasingly become the mainstream of the current improved HHO. Mohamed et al. [36] set up a more efficient chaotic HHO algorithm (CHHO) embedded with Simulated Annealing (SA) algorithm. Kashif et al. [37] combined sine cosine algorithm (SCA) with HHO and proposed a hybrid method SCHHO. Hager et al. [38] created a hybrid enhanced chimp HHO algorithm (ECH3OA), and found that each algorithm had strong exploration ability.
Many improved HHO algorithms are applied in fields including trajectory prediction, medical treatment, electrical power, new energy industry, information technology and so on. Xuxu et al. [39] proposed DEHHO hybrid algorithm with Differential Evolution (DE) algorithm, which was applied to the initialization of Back Propagation Neural Network (BP) parameters to obtain trajectory prediction results. Simulation experiments found that the prediction accuracy of DEHHO-BP network was higher. Ines et al. [40] proposed the simulated annealing chaotic adversarial Binary Harris Hawks Optimization (BCOHHS) algorithm, which was applied to nine high-dimensional medical datasets. It was found in the experiment combined with further operation show that the used BCOHHS has higher accuracy on almost all datasets. Magdy et al. [41] proposed a hybrid high ability learning and optimization method called CovH2SD to solve the problem of rapid diagnosis of the new popular coronavirus disease (COVID-19), and it was experimentally proved that CovH2SD can achieve the most advanced and efficient performance. Ahmed et al. [42] introduced a HHO (MHHO) combined with multi-view linking method to consume the dimension of anxiety data, and found in the experiment that MHHO had the best ability to consume the dimension of the data set with the smallest standard deviation. Vineet et al. [43] proposed to design a restriction strategy based on model operation and result predictive controller assisted Leader HHO (MPC-LHHO) for the frequency and voltage balance of renewable energy power supply system. According to the convergence profile, LHHO method was found to be superior to MPC controller parameter adjustment. Kumar et al. [44] set up a more efficient improved HHO (MHHO) algorithm and embedded it in the optimal scheduling of Virtual Power Plant (VPP). It was found in the experiment combined with further operation indicated that the used algorithm can maintain a more stable effect in the dual-objective scheduling problem, and has better benefits with lower emission values. ÇetınbaŞ et al. [45] proposed a new hybrid HHO combined with Arithmetic Optimization Algorithm (AOA), which was applied to the microgrid for testing. It was found in the experiment combined with further operation show that the used algorithm can generate the lowest power supply loss probability and energy cost as well as the highest renewable rate. Ashok et al. [46] set up a more efficient enhanced HHO (EHHO) algorithm to solve the highly constrained nonlinear multi-objective hydrothermal power dispatching (MOHGS) problem. It was found in the experiment combined with further operation show that the used algorithm achieves the minimum amount of discharge water. Shiming et al. [47] proposed an Adaptive HHO algorithm (ADHHO) based on continuous triangular difference, which was applied to extract parameters in four kinds of component models. It was found in the experiment combined with further operation show that the used algorithm can shorten the CPU running time and achieve stable solution performance. Jiao et al. [48] proposed an Enhanced HHO (EHHO) method originated from Orthogonal module Learning (OL) and General Adversarial learning (COBL), which was applied to accurately estimate the parameters of low consumption solar energy storage cells and natural photovoltaic sensitive modules. It was found in the experiment combined with further operation show that the used EHHO algorithm can accurately describe the actual power supply characteristics of solar integrated cells. Hassan et al. [49] proposed a wind speed forecasting (WSF) model CA-ICEEMdan-HHO-STAT-S2S by combining correlation Analysis (CA) and decomposition techniques, HHO algorithm and Spatio-temporal attention based on S2S (STAt-S2S). Relevant experiments directly indicated that the combining model owns more stable prediction effect on wind speed with the smallest error and the highest efficiency. Ayşe et al.[50] proposed a new binary HHO variable algorithm, which was mixed embedded in solving the micro-location situation of wind turbines. Relevant experiments after the introduction of the engineering optimization problem proved that the proposed algorithm can obtain better micro-localization results. Mingliang et al. [51] proposed an extreme learning machine (ELM) rock burst prediction model based on improved HHO (IHHO) algorithm and applied it to 136 groups of typical rock burst examples. The experiment found that the model had higher accuracy and better visual effect. Am et al. [52] combined HHO with KNN classifier to predict spam. Combining multiple experiments to extract network junk information, the results directly indicated that the accuracy of mail classification and settlement is the smallest. Kamboj et al. [53] proposed the hybrid Harris Hawk-sine cosine algorithm (hHHO-SCA), which was applied to solve the problem of unknown search space type. The experiment found that the solution quality of the algorithm was high, and it was conducive to solving discrete and continuous problems. İlker et al. [54] proposed a quantum-behaved particle enhanced multi-population HHO and roulette wheel selection (QMPMPHHOroulette) algorithm. We experimentally find that the proposed HHO variant can achieve more accurate solutions than other algorithms in solving dynamic quantization optimization problems. Sandeep et al. [55] proposed to apply HHO algorithm to Support Vector Machine (SVM) to make error estimation of precise model in monthly sediment load estimation (SL) prediction. It was found in the experiment combined with further operation show that the used algorithm has advantages in improving the monthly SL prediction accuracy of conventional SVM and predicting the statistical indicators of SL nonlinear behavior. Yankai et al. [56] established the Adaptive Multi-objective Dynamic Harris Hawks Optimization (AMODHHO) algorithm, and used the Mixed Flow green scheduling model of Dynamic event DEs (MOHFGSM-DEs) to solve the dynamic event in the emerging digital workshop. It was found in the experiment combined with further operation show that the used algorithm avoids unplanned downtime of the model caused by dynamic events, and avoids huge economic losses and environmental pollution. Sangeetha and Kumaran [57] proposed a Taylor-Harris Hawks Optimization driven Long Short-Term Memory (THHO-BiLSTM) sentiment analysis method. Experiments obtain high accuracy of comment extraction. Alamir [58] proposed an artificial neural network model ANN-HHO combined with Harris Hawks Optimization, which was applied to food preference under different types of masking background noise and background noise levels relative to the room. It was found in the experiment combined with further operation show that the used model has higher accuracy in judging weights and biases.
The above improved Harris Hawks Optimization has more efficient breakthrough results than the original algorithm in different situations of original text and application, moreover, the improved HHO also has the problems of unstable optimization effect, lead to stagnation in the late stage of iteration, and still has the ability to improve the standard deviation when dealing with high-dimensional problems. Therefore, it is needy to try to solve the shortcomings of the improved Harris Hawks Optimization in the research. The algorithm with higher universality, stability and further improvement of optimization effect is obtained. Accordingly, this paper proposes a composite improvement on the basis of the original Harris hawk. The corresponding main contributions of this research are as follows:
1)A new compound improved Harris Hawks Optimization (CIHHO) is proposed, which uses environmental factors to affect energy changes, dynamically regulates the exploration and exploitation phase during the algorithm, introduces the Versoria function to modify the original random jump strength, and introduces Levy flight function adjustment factor to reduce the Levy flight disturbance, and properly reduces the flight step to reduce the error of algorithm in calculation.
2)Evaluate the solutions generated by CIHHO on initial 30 dimensional and 50 dimensional optimization functions using the CEC 2017 test suite, and compare other improved algorithms to determine the effectiveness and quality of the improved algorithms.
3)The proposed CIHHO algorithm is further applied to three engineering experiments of welding beam design, pressure vessel design and three-bar truss design to to obtain more accurate actual parameter values and analyze whether the performance of the proposed algorithm is optimal.
The remainder of this paper is organized as follows: The basic steps of the original HHO algorithm are presented in the sections of Chapter 2. Chapter 3 focuses on the improvement strategy of HHO algorithm. In Chapter 4 and Chapter 5, the experiment of the proposed method is carried out, and the results are demonstrated and analyzed. Based on the experimental results, the obtained algorithm CIHHO and other algorithms are analyzed and summarized at the same time. Chapter 6 is a elaboration and induction of the existing work and future actions and expectations.
2 Harris hawks optimization algorithm
This section mainly describes the HHO algorithm simulation in nature, about the initialization phase, the exploration phase, the transition phase and the exploitation phase process.
2.1 Initialization phase
In this phase, the number and position of Harris hawk population need to be initialized, and the random number generation method is used to generate the initial population. Fitness function is an objective function of the optimization problem. Because there are various single-objective or multi-objective problems in the actual life and production activities, the fitness function needs to be designed differently according to different applications, so as to facilitate the HHO algorithm to transfer. The initialization phase needs to design the corresponding boundary constraints to control the value of the solution in a certain range, and set all the parameter values at the same time.
2.2 Exploration phase
After completing the initialization phase, the next phase mainly simulates the exploration activity of Harris hawks. In the HHO model, the strategy mechanism of Harris hawks' random stay can be simulated. The random selection factor considering the roosting strategy is set to q by using the equal probability 50% selection strategy, and the value of q is randomly selected between 0 and 1. In each iteration, the value is updated and different location selection strategies are carried out according to the size of q. When q ≥ 0.5, the Harris hawk will choose a random location, while when q < 0.5, the hawk will choose the location of other family members to complete the global exploration behavior. After analysis, it is not difficult to get the corresponding mathematical expression as follows:
where t is the t-th node in the total process of algorithm operation, which is called the t-th iteration, \(X(t+1)\) is the t + 1-th spatial position information, which is used to describe the vector representation of the Harris hawk into the next flow iteration node, \({X}_{rand}(t)\) is the spatial position information of a random Harris hawk, which is randomly selected from the biological population in the t-th iteration and grabs its vector result according to its environment, meanwhile,\({X}_{rb}(t)\) represents the spatial position information of the escaping prey and also represents the optimal position, existing in the same environment with Harris hawks in each iteration, so as to obtain the position vector with the same dimension in the same iteration node. \({X}_{mid}(t)\) is the transition vector value obtained by averaging the position information of all hawks in the current population, \({r}_{1}\), \({r}_{2}\), \({r}_{3}\), \({r}_{4}\) represents four random numbers that do not interfere with each other, but the value is also between 0 and 1, and the values are changed in each time node as the iteration updates, ub and lb respectively represent the upper and lower critical values of the position variable to prevent the vector from exceeding the range. For solving the mean position vector \({X}_{mid}(t)\), the corresponding formula is as follows:
where \({X}_{i}(t)\) is the spatial position of the i-th hawk in the t-th iteration, Nn represents the total number of Harris hawks. The simplest mathematical rule is used to accumulate the position vector of each hawk and then remove the population total to calculate the average position.
2.3 Transition phase
With the change of prey escape energy, the exploration phase of HHO will be transformed into the later attack exploitation phase, in this common transitional phase, the energy of active prey will change significantly and slowly decrease. The physical energy factor of prey is set as \({E}_{t}\), and its change is expressed by the formula:
In the formula, T is the total number of iterations required for the algorithm to process the problem, \({E}_{0}\) is the state in which the escape energy has not changed at the beginning, and it will continue to change after the end of each iteration node, and there is no regular value between − 1 and 1. Dynamic \({E}_{t}\) escape energy is the key to select the Harris hawks’ activity phase, the \({E}_{t}\) take absolute value, through the size of the relationship between 1 and implementation algorithm to distinguish the global pervasive search and local development process, when \(|{E}_{t}|\ge 1\) or higher, Harris hawks tend to exploration phase, and when \(|{E}_{t}|<1\) each hawk has entered a phase of exploitation.
2.4 Exploitation phase
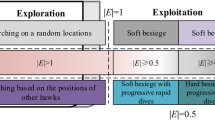
After detecting the prey, Harris hawks can carry out the exploitation phase, and select the appropriate attack strategy by considering two indicators: the safety index of successful survival of prey avoiding hunting and the dynamic escape energy of prey. a new random variable number a is introduced as the risk coefficient of prey capture before Harris hawks attack, and the range from [0,1]. Taking 0.5 as the critical value, when \(\alpha \ge 0.5\), it means that the prey with high risk coefficient is almost impossible to escape successfully. On the contrary, it means that the risk coefficient is low, and the prey can survive successfully at this phase. The absolute value of the dynamic energy \(|{E}_{t}|\) can be further judged, after through \(|{E}_{t}|\) and a combination of available attack strategy.
2.4.1 Soft besiege in the exploitation phase
When the value range of the two parameters reaches \(\alpha \ge 0.5\), \(|{E}_{t}|\ge 0.5\), This is the phase where the prey has some energy left and tries to escape but is unable to. The simulation formula based on soft besiege includes:
where ∆X(t) is the distance value between the hidden vector of prey in the t-th iteration node and the vector of the current hawks circling search, \({r}_{5}\) is a random number and the value also between 0 and 1, B represents the energy consumption intensity of irregular jumping of prey in the process of escape, the value is between 0 and 2, and the value of jump strength is constantly changing randomly with the iteration.
2.4.2 Hard besiege in the exploitation phase
When the value range of the two parameters reaches \(\alpha \ge 0.5\), \(|{E}_{t}|<0.5\), this state on behalf of the escape of the game itself very low energy cannot support flight activities, the hawk position update using the Eq. (7) for:
2.4.3 Soft besiege with progressive rapid dives
When the value range of the two parameters reaches \(\alpha <0.5\), \(|{E}_{t}|\ge 0.5\), the prey can avoid hunting and survive successfully. In this case, the algorithm updates the mechanism of soft besiege more intelligently, and introduces the design idea of levy flight (LF) to simulate the irregular diving motion of Harris hawks. The corresponding formula is as follows:
where dim symbolizes the dimension value of the solution in the formula, S is also a random position information, representing the irregular vector of \(1\times dim\), u and v are also two random numbers that do not interfere with each other, and randomly grab values between 0 and 1, β is the default constant algebra as the flight step, fixed to 1.5. After introducing LF, the updated soft siege strategy function is as follows
2.4.4 Hard besiege with progressive rapid dives
When the value range of the two parameters reaches \(\alpha <0.5\), \(|{E}_{t}|<0.5\), it stands for high risk coefficient, and it is almost impossible for prey to escape successfully, hard besiege can still be used in this case, only hard besiege optimization purpose is to choose the narrow down their average position and the distance of escaping prey. The rule function executed under hard besiege is as follows.
Under the new rules, Y and Z need to be optimized and adjusted. The design of Z remains unchanged, while Y converts \(X(t)\) to \({X}_{mid}(t)\) in the design of difference.The final function is:
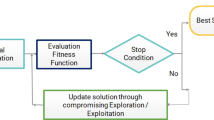
The flow chart of the final Harris Hawks Optimization algorithm is shown in Fig. 1. In practice, in each optimization problem, the algorithm decomposes the target problem according to different phases, and finally obtains the optimal choice to solve the complex problem:

Flow chart of the HHO algorithm
3 Compound improved Harris hawks optimization algorithm
The traditional universal HHO algorithm still has some weaknesses that are difficult to overcome in the design process. Firstly, the original algorithm is prone to aggregation when solving most high-dimensional problems, which makes all individuals gather in a narrow space to restrict the search activity, and it is almost impossible to get rid of the local area for further development. Secondly, the multivariate metamorphosis and activities of organisms in the real nature are not considered when constructing the HHO model, and the population diversity is often not considered.
3.1 Escape energy based on environmental factors
The action stage of the Harris Hawks is distinguished by the escape energy, and the critical value is 1. Because of this characteristic of the Harris Hawks algorithm, it is found that the escape energy \({E}_{t}\) plays an irreplaceable role in controlling the early circling exploration and later attack exploitation. The better the performance of \({E}_{t}\) value in any phase, the more conducive to the global search, and the smaller \({E}_{t}\) value is, the more conducive to the exploitation. The \({E}_{t}\) in the code without any improved HHO algorithm fluctuates linearly and shrinks regularly. According to the linear change, it is easy to know that when the number of iterations is less than \(\frac{T}{2}\), the algorithm executes the exploration phase, conversely, the algorithm executes the exploitation phase. The original strategy is unable to describe the process of hawk strangling prey in biological nature effectively, and the physiological balance was lost in the control of early circling exploration and later attack development. Therefore, this paper proposes a certain improvement strategy for the critical value of the exploration and exploitation phase of irregular multidimensional adjustment, and realize an effective transition. In this paper, an escape energy formula combining environmental factors is proposed, which is defined as:
In the formula, the parameter \({e}_{s}\) is the environment factor, which is multiplied with the maximum iteration number T to distinguish the early circling exploration phase from later attack exploitation phase. \({r}_{6}\) is a random number and the value also between 0 and 1, which does not change during the iteration. It is easy to prove that the proposed parameter can focus more time on the later attack exploitation phase, and effectively avoid the algorithm unable to obtain the true solution in the transition phase. Figure 2 shows the dynamic comparison diagram of the proposed nonlinear decreasing energy. It is found that the nonlinear decreasing energy can maintain a relatively large value in the early iteration, so as to ensure the data grabbing ability of the algorithm in the early global circling exploration, and the energy can be kept in a small range in the later iteration, so that the algorithm can balance the global search and local development strategy, and extend the time of local exploitation. Implementing a fine search helps the advanced algorithm get rid of the local space for further development.

Dynamic comparison of energy change
3.2 Jump strength update based on Versoria function
The jump strength of the original Harris hawk algorithm was determined by taking a random value, but in principle, the prey still needed to ensure a certain jump strength in the development stage to improve the attack ability of Harris Hawk, and it was effectively developed in the later iteration. The change of dynamic escape energy will inevitably lead to the corresponding change of jump strength in the process of escape. The nonlinear fluctuation and decreasing of escape energy can be obtained after the introduction of environmental factors. Therefore, when adjusting the jump strength, the change should also show a downward trend. This paper introduces the concept of Versoria function, Versoria function is also known as Anecy tongue-loop, which is a kind of plane curve commonly used in mathematics. The standard Versoria function graph is shown in Fig. 3, and the corresponding mathematical expression is as follows. When i = 1, it is the standard tongue-loop:

Standard tongue-loop
Using the definition of Versoria function, the design jump intensity update is as follows:
The change in the formula is shown in Fig. 4d. Compared with the random change of the original jumping intensity, the improved jumping strength strategy can effectively describe the escape process of the actual prey. The jumping strength presents a large value at the early phase of iteration, which maximize the global multidimensional search ability of the algorithm.

Comparison of jump strength changes
3.3 Levy flight function adjustment factor
Levy flight is a strategy to help the low order algorithm get rid of the local space for further development, applied in the later attack exploitation phase of the HHO, affecting the soft and hard besiege of the Harris hawks with progressive fast dives. Although Levy flight function strengthens the randomness of algorithm optimization, it only plays a role when the individual is stuck in the later attack exploitation phase. In order to further adjust the local fine search strategy of the algorithm, the adjustment factor is introduced on the basis of Eq. (9) and Eq. (15), as shown in the position update Eq. (20):
The Levy flight impact factor before and after adjustment can effectively reduce the impact of Levy flight, and in the later iteration, due to less disturbance, it can effectively get rid of the local optimal solution for further development. Meanwhile, the traditional HHO algorithm uses a fixed step value of 1.5. In order to select a more reasonable search distance and ensure the accuracy and stability of the advanced algorithm, random white noise interference is applied to the step size, and the \(\beta\) in the original Eq. (10) is changed into:
3.4 Comprehensive review of CIHHO
CIHHO algorithm is mainly divided into three parts. One is to simulate the nonlinear escape energy in natural environment, and update Eq. (16) through algorithm 1. The second is to improve the strategy of decreasing jump strength in the development phase. Finally, the cosine function is used to perturb the search range in the progressive siege mode. Compared with other improved HHO algorithms, CIHHO completely refines the process operation of the algorithm, jumps out of the local optimal solution to a certain extent, and greatly improves the search ability of the algorithm. See Algorithm 1 for the pseudo code of the proposed CIHHO algorithm.

Algorthm 1 Pseudo code of CIHHO algorithm
The time complexity of CIHHO algorithm is further analyzed, and the corresponding steps are as follows.
-
(1)
The initialization of the swarm of hawks requires O(T × Nn × dim) time.
-
(2)
The fitness evaluation of hawks requires O(T × Nn) time.
-
(3)
The selection of the state of the prey (the best solution obtained so far) requires O(T × Nn) time.
-
(4)
The energy update mechanism in CIHHO is based on environmental factors, and requires O(T × Nn) time.
-
(5)
The jump strength update in the CIHHO is based on the Versoria function and requires O(T × Nn) time.
-
(6)
The adjustment factor for the Levy flight function in the CIHHO requires O(T × Nn × dim) time.
The parameters T, Nn and dim are the same as those defined in Chapter 2, representing the maximum number of iterations, population size and problem dimension respectively. Since CIHHO does not supplement any additional process, there is no difference in cost calculation. In summary, the total computational time for the CIHHO is O(T × Nn × dim) for T iterations. Hence, by comparing the complexity of the conventional HHO and the CIHHO, it can be concluded that complexity-wise both the algorithms are the same.
4 Experiment
In this section, the experimental environment is designed and combined with 29 benchmark universal functions to systematically verify the effectiveness of the algorithm after adding the improved strategy. These utility functions are summarized from the CEC 2017 inspection suite [59]. Among them, two practical functions F1 and F3 are determined to be unimodal, and seven groups of functions F4 to F10 are determined to be multimodal. Further analysis shows that the 10 functions F11 to F20 are more complex mixed functions, and the 10 functions F21 to F30 are the most difficult to further optimize and show weak differences.
4.1 Performance comparison between CIHHO and variant HHO algorithm
4.1.1 Comparative effect of CIHHO in 30 dimensions
The CEC 2017 inspection function suite is implanted to compare the CIHHO with the HHO and other variant HHO algorithms: HHO_JOS [60], LHHO [43], LMHHO [61] and NCHHO [62] totally 4 algorithms are selected at the same time to obtain the results. The experimental parameter analysis settings in the code of each advanced algorithm are listed in Table 1. For the fairness of experimental data, all experiments control the number of evaluations in the dimension multiplied by 10,000, that is, set the value of natural population reserve to 100 in order to ensure that the algorithm will not stagnate due to the lack of population diversity in the process of operation, and when the problem dimension is 30, the maximum number of function evaluations is 300,000. All the six algorithms need to run in order on each practical function for up to 30 times. The largest individual in the numerical performance obtained by the operation is regarded as the best (Best) individual. The result obtained by summing up the location information of all individuals and dividing by the population reserve value is the average value (Aver). The individual with the largest numerical performance in the population is regarded as the worst (Worst) individual. Finally, the standard deviation (Std) is used as the standard for evaluating the improvement of the algorithm, in order to further analyze the data and judge whether there is any distinction between the existing improved algorithm and others, the Wilcoxon test is used to verify the improvement effect of the CIHHO algorithm. The principle of using the Wilcoxon test in this section is to compare each algorithm with the CIHHO, and the minimum value obtained by comparing each parameter value for each row is labeled as bold mainly for analysis, and the experimental differences of Wilcoxon test are directly introduced into the table. Finally, the average value is used to sort each algorithm. If the mean values are equal, the standard deviation is considered to obtain a clear sequential relationship between the algorithms.The corresponding results are shown in Table 2.
According to the decimal point results obtained in Table 2, the corresponding optimal value, relative worst value, general statistical average as well as discrete standard mean square deviation of the total 30 runs are used as evaluation metrics. The best of these results are labeled as black holds mainly for comparison, while the general statistical average result of grabbing 30 runs is observed and the general statistical streamline convergence curve X–Y of Fig. 5 is plotted. It should be noted that the data in all tables are the comparison results of subtracting the theoretical optimal value of CEC 2017, including the data of all subsequent experiments, and the convergence curve X–Y is drawn from the actual results of the actual operation without subtracting the theoretical optimal value.




Comparison of F1-F30 convergence curves in 30 dimensions
Combining Table 2 to analyze the streamline convergence curve of F1-F10 in Fig. 5, it is found that among functions F1, F3, F5, F6, F7, F8 and F10, CIHHO algorithm has minimum results and fastest iteration process speed. Particularly in function F3, when other algorithms are obviously hard to get rid of the local space for further development in the early and middle period, CIHHO can still mine more refined solutions. Although the iteration curve of CIHHO algorithm is not obvious in function F4, it is found that the results of general statistical average, relative worst value and discrete standard mean square deviation of CIHHO algorithm are intuitively ahead of the other five algorithms that have been added combined with the data in Table 2, obviously, it is possible to reach a consensus conclusion that the convergence results of CIHHO algorithm in function F4 will be better. In a word, CIHHO algorithm has better optimization effect on dealing with 30-dimensional simple unimodal function and advanced multimodal function.
Secondly, by analyzing the convergence curve of functions F11-F20, it is found that cihho algorithm has the smallest convergence result and the fastest iteration speed in functions F11, F12, F14, F16, F18, F19 and F20. Although the iteration curves of CIHHO algorithm in functions F13, F15 and F17 are not obvious, some of them are slightly inferior to HHO_JOS algorithm, but its convergence results also show an intuitive advantage over other algorithms, which further shows that CIHHO algorithm has a stronger ability to get rid of local space for further development. The convergence speed is faster. In a word, experiments show that the CIHHO algorithm has high advantages in dealing with 30 dimensional mixed functions.
Finally, the convergence curve of function F21-F30 in Fig. 5 is analyzed in combination with Table 2. The results show that the iteration speed and results of CIHHO convergence curve show intuitive advantages in functions F21, F22, F23, F26, F27 and F30. Although the iterative graph curves of functions F25, f28 and F29 are not obvious, combined with the results in Table 2, it is found that CIHHO algorithm is superior to other algorithms. Although the convergence curve of F24 function is slightly lower than HHO_JOS algorithms, but it is found that the final effect of CIHHO algorithm is still intuitively superior to other algorithms.
Combined with Wlicoxon and ranking results, the improved CIHHO algorithm can beat each variant algorithm more than 20 times, and the total ranking value is 1.2414, which is the leading among the six algorithms, which proves that the improved CIHHO algorithm has greater advantages than other variant algorithms. To sum up, CIHHO has a certain optimization effect on solving CEC 2017 test function set.
4.1.2 Comparative effect of CIHHO in 50 dimensions
This section uses the CEC 2017 inspection function suite to compare the results of the variant Harris Hawks optimization algorithm on the 50 dimensional problem, and the maximum number of function evaluation is 500,000 times, and the final decimal point results are obtained in Table 3 after running.
According to the decimal point results obtained in Table 3, the corresponding optimal value, relative worst value, general statistical average as well as discrete standard mean square deviation of the total 30 runs are used as evaluation metrics. The general statistical streamline convergence curve X–Y of Fig. 6 is plotted.




Comparison of F1-F30 convergence curves in 50 dimensions
By analyzing the iteration graph curve of functions F1-F10 in Fig. 6 in combination with Table 3, it is found that among functions F3, F4, F5, F6, F7, F8 and F10, CIHHO algorithm has the smallest results of optimal value and average value and the fastest convergence speed. Although the CIHHO algorithm is slightly inferior to HHO_JOS in functions F1 and F9 algorithm, but also more quantitative than most algorithms. In a word, CIHHO algorithm also has good ability to remove local space when dealing with 50 dimensional simple unimodal functions and advanced multimodal functions.
Secondly, the iteration diagram curve of functions F11-F20 in Fig. 6 is analyzed in combination with Table 3. The results show that among the functions F11, F12, F14 and F19, CIHHO algorithm has the best dynamic iteration statistical results and the fastest convergence speed, and the final optimization results of functions F16, F17 and F18 also show an intuitive leading edge. It is proved that the CIHHO algorithm has high order stability in solving 50 dimensional mixed functions.

Example of welding beam design [53]

Example of pressure vessel design [53]

Example of three-bar truss design [69]
Finally, Table 3 is used for analysis. Firstly, according to the iteration graph, it is is possible to reach a consensus conclusion that the iteration process speed and results of CIHHO iteration graph curve in functions F21, F22, F23, F26, F27 and F30 are ahead of those algorithms. In F21, F23, F25, and F27, except for the corresponding optimal value shows slightly weak disadvantage of backwardness of the individual algorithms, and the other general statistical average, relative worst value as well as discrete standard mean square deviation are intuitive leading the other algorithms. In F22 and F26, the effect of the corresponding optimal value, relative worst value, general statistical average are the best except the discrete standard mean square deviation is slightly behind the individual algorithms. In conclusion, the optimization effect of CIHHO in solving 50-dimensional composite functions is further enhanced.
Combined with the Wilcoxon test, it is found that CIHHO algorithm has obvious advantages compared with the selected five algorithms. In the 50-dimensional evolutionary problem, HHO_JOS is used as a competitive algorithm. The number of times CIHHO beats HHO_JOS algorithm is relatively small, but it also reached 21 times, and the total ranking value is 1.2069, which proves the advantages of the research and stability of the CIHHO algorithm. In general, CIHHO has strong competitiveness in the comparison of seven algorithms.
4.2 Performance comparison between CIHHO and the improved algorithm
To further test the performance of the algorithm, while using the CEC 2017 detection function suite, CIHHO is compared with the ATOA [63], DAOA [64], DEWOA [65], ISSA [11], MELGWO [66], LSHADE_ SPACMA [67], LSHADE_cnEpSin [68] totally seven algorithms for calculation.Because the operation of Chapter 4.2 is similar to that of Chapter 4.1 and two more algorithms are added than Chapter 4.1, the amount of calculation is too large and there are too many statistical data, so all the corresponding chart results are placed in the Appendix 1 for viewing.
4.2.1 Comparison of CIHHO and improved algorithm in 30 dimensions
This section uses the CEC 2017 inspection function suite to compare the results of the improved optimization algorithm on the 30 dimensional problem, and the final decimal point result is obtained after running. The parameter values of each algorithm are summarized in Table 7, and the results obtained after running are shown in Table 8, all the tables are add into the Appendix 1.
Combining with the decimal point results in Table 8, the general statistical streamline convergence curve X–Y in Fig. 10 in the Appendix 1 is drawn. Because LSHADE_SPACMA and LSHADE_cnEpSin are the state of the art (SOTA) algorithms, which means that they are the top algorithms in the CEC test set and have very strong optimization performance, also the number of iterations used are different, so they are not added to the drawing.According to the experimental results, it is not difficult to find that the performance of most of the selected algorithms after adding two kinds of SOTA algorithms is worse than them, but CIHHO can still get the optimal value with the smallest value in functions F25 and F26. Combined with Wlicoxon test and ranking results, CIHHO can beat ATOA, DAOA, DEWAO, ISSA more than 25 times, which proves the effectiveness of the proposed CIHHO algorithm. CIHHO and MELGWO compete with each other, but CIHHO can still beat MELGWO algorithm 13 times, and the ranking value difference between them is only 0.1379, which proves that CIHHO algorithm can always maintain certain excellence in solving CEC 2017 function problems.




Improved Algorithm Comparison of F1-F30 convergence curves in 30 dimensions
4.2.2 Comparison of CIHHO and improved algorithm in 50 dimensions
Finally, the algorithm is applied to compare the results of the eight optimization algorithms on the 50 dimensional problem, and the final decimal point results are obtained after running. The results of each algorithm are shown in Table 9 of the Appendix 1, and the iteration diagram is shown in Fig. 11. Combined with the data results in Table 9, the algorithm can still achieve high optimization performance on the 50 dimensional problem. Although the ranking result is slightly inferior to the LSHADE_SPACMA and LSHADE_cnEpSin algorithms, it is still superior to other algorithms, and the minimum ranking value is 3.5517. As shown in Fig. 10 and Fig. 11, CIHHO algorithm can obtain consistent convergence effect when solving functions F1, F3, F12, F14, F28, F29 and F30. When most algorithms are difficult to search the optimal solution at the end of the iteration, CIHHO can jump out of the local optimum and further update the iteration to find the optimal value, which proves that the optimization property of the algorithm will not change with the increase of the dimension of the iteration problem.




Improved Algorithm Comparison of F1-F30 convergence curves in 50 dimensions
4.3 Ablation experiment
Finally, in order to prove that each improved strategy added into the original HHO is effective as well as influential, this paper designs ablation experiments related to the CIHHO algorithm. In the preparation for further improvement of the experimental operation, the CIHHO algorithm combined with the escape energy strategy based on environmental factors is set as CIHHO-I, the CIHHO algorithm combined with the jump strength strategy based on the Versoria function is set as CIHHO-II, and the CIHHO algorithm combined with the adjustment factor strategy of Levy flight function is set as CIHHO-III. Furthermore, the algorithm that merged CIHHO-I and CIHHO-II was defined as CIHHO-IV, the algorithm that merged CIHHO-I and CIHHO-III was defined as CIHHO-V, and the algorithm that merged CIHHO-II and CIHHO-III was defined as CIHHO-VI. Since the original HHO algorithm does not add parameters, all variants of the algorithm do not set parameter initialization. By comparing the improved Harris Hawks Optimization with HHO, CIHHO-I, CIHHO-II, CIHHO-III, CIHHO-IV, CIHHO-V, CIHHO-VI algorithms under the same constraints, the final difference results after summary are direct displayed in Table 10 in the Appendix 1.
Since there is little difference between the numerical changes of various variant algorithms in the ablation experiment, only part of the function iteration diagram is selected in the Appendix 1 to form Fig. 12. Compared with the standard HHO algorithm, CIHHO algorithm beat the standard HHO algorithm 27 times, and each improved strategy can achieve certain results. Combined with Wilcoxon test and ranking results, it is found that the effect of Levy flight disturbance factor is the best, and its related variant algorithm can beat the original HHO algorithm more than half of the results, which is not difficult to prove the success of the improvement. At the same time, it is found that the result of CIHHO-IV is better than that of the variant algorithm which adds the improvement strategy alone, which further proves that CIHHO algorithm can produce certain differences through different superimposed improvement strategies.


Part Comparison of F1-F30 convergence curves in 50 dimensions
4.4 Experiment analysis
In the general Chapter 4, three sections are used for analysis. First, the CIHHO algorithm is compared with other variant HHO algorithms to verify that the algorithm has obtained substantial results in the study of the improved HHO algorithm. Second, the CIHHO algorithm is compared with other improved algorithms, so as to focus on the analysis of the advancement of the algorithm in obtaining the optimal results and the shortcomings of the SOTA algorithm to be improved, Finally, ablation experiments are used to verify the impact of each improvement on the CIHHO algorithm. According to sufficient experimental results, the analysis shows that the proposed CIHHO algorithm is effective in solving the function of CEC 2017.
5 Performance of CIHHO on engineering applications
In this section, three different engineering benchmark problems—welding beam design problem, pressure vessel design problem, and three-bar truss design problem are used to evaluate the performance of CIHHO in practical problems, and the improved Harris eagle algorithm is compared with HHO, DAOA, ISSA, HHO_JOS, LHHO, LMHHO and NCHHO algorithms are applied together in the problem for comparison, and the comparison results are obtained.
5.1 Welded beam engineering design problem
The welded steel plated beam problem is a typical engineering design problem, together with the corresponding example is shown in the Fig. 7, which aims to discover the best solution to minimize the rework production price of the welded beam under multi-constrained situations. The required parameters in the welding beam design problem include rod thickness (B), rod length (L), weld thickness (H) and reinforcement height (T), and the corresponding mathematical model design is shown in Appendix 2. The CIHHO algorithm and the improved algorithm selected in Experiment 4.1 are applied to the welding beam problem for comparison. According to the results in Table 4, it is found that the minimum production cost can be obtained by using the CIHHO algorithm, which is 1.72714.
5.2 Pressure vessel engineering design problem
The proposal of pressure vessel engineering design is to make the operators think about how to get the lowest pressure vessel rework production price in the work cycle. The corresponding example is shown in Fig. 8, where L is the measured length of the smooth section of the cylinder assembly, R is the radius of the smooth inner wall of the corresponding cylinder, and Th and Ts is the tempered wall thickness of the outer ring layer of the head and cylinder respectively. The mathematical quantitative operation model of the problem is shown in the Appendix 3. CIHHO algorithm is also suitable for the welding beam problem, Add all the data that should be obtained by each algorithm after the experiment to Table 5. It is found that although the algorithm does not significantly optimize the variables, it can also achieve the optimal cost, and the cost is intuitively ahead of the other 7 algorithms.
5.3 Three-bar truss engineering design problem
Finally, in order to further refined analysis the optimization results of the CIHHO algorithm for engineering design problems, the three-bar aluminum alloy truss problem is proposed to minimize the truss solid weight so as to minimize the burden of the rod structure. The corresponding example of the truss is shown in Fig. 9, the mathematical quantitative operation model of problems is described in the Appendix 4, and the experimental results are shown in the Table 6. A2 represents the stiffness of the truss. By optimizing the cross-sectional area of the bar, according to the results in Table 6 obtained from the experiment, it is found that the CIHHO algorithm can get the corresponding optimal result, and the minimum mass obtained by the CIHHO algorithm is the same as that obtained by the two improved algorithms HHO_JOS and LHHO.
6 Conclusion
In order to dispose of the problems of slow iteration and difficult to get rid of the local space for further development of the original Harris Hawks Optimization, CIHHO algorithm is proposed to solve these problems. Firstly, the nonlinear escape energy decline mechanism based on environmental factors is used, and the local development time is extended by dynamically adjusting the early circling exploration and later attack exploitation phase to help get rid of the local space. Secondly, the random jump strength of the original algorithm is improved by integrating the idea of the Versoria function, and the data grabbing ability of local space of the algorithm is improved by simulating the actual intensity decline and change process of prey. Finally, the compound improved Harris Hawks Optimization (CIHHO) is obtained by combining Levy flight function adjustment factors. The core advantage of the improved CIHHO algorithm is its high stability. Compared with other algorithms in the CEC 2017 function test set, the improved CIHHO algorithm has a certain optimization effect on the processing of unimodal and multimodal functions, and further accelerates the convergence speed in the attack phase in the middle and late phases of iteration. The results on 30 and 50 dimensional optimization problems are stable, which proves that the CIHHO algorithm has strong stability and robustness, Applying CIHHO to three engineering problems can also get more quantitative results. Although the improvement effect of CIHHO algorithm is stable, there are still some defects to be solved, such as the average value is generally high at the initial phase of iteration, lack of absolute advantages compared with the original algorithm and competitive algorithm, long running time and slow running results. Therefore, some adjustments can be made in the future research:
-
For the improvement of energy and jump strength, the cyclic mechanism is not considered. Although the randomness of the original algorithm is improved, the recovery level of energy and jump strength is not considered.
-
The position update formula of Harris Hawks Optimization is improved accordingly, and the problem of high average value in the early iteration can be solved by means of the hunting mechanism.
-
In the exploitation phase, variation mechanisms can be considered to improve population diversity, so as to avoid stagnation of the algorithm at the later stage of iteration, when individuals are concentrated in a small area and cannot be further optimized.
-
The improved algorithm will be applied to complex multi-objective optimization problems with higher dimensions. In the subsequent research process, CIHHOFootnote 1 algorithm can be considered to be introduced into the energy allocation of nuclear power plants in the fields of electrical, electronics, biology and other fields, and the open research problem (ORQ) of capacity consumption of wind power nuclear power plants for further in-depth study, and the optimization stability of the algorithm will be further tested under multi-constraint conditions.
Data availability
All data for this study are available from the corresponding author.
References
Li, Y., Li, F.: PSO-based growing echo state network. Appl. Soft Comput. J. 85, 105774 (2019)
Nitin, C., Sagar, S.: Performance analysis of GA, PSO and JA for determining the optimal parameters in friction drilling process. Eng. Sci. Technol. Int. J. 35, 101246 (2022)
Wenyi, D., Juan, M., Wanjun, Y.: Orderly charging strategy of electric vehicle based on improved PSO algorithm. Energy 271, 127088 (2023)
Baoye, S., Zidong, W., Lei, Z.: An improved PSO algorithm for smooth path planning of mobile robots using continuous high-degree Bezier curve. Appl. Soft Comput. J. 100, 106960 (2021)
Ricardo, C., Rubén, G., Efrén, M.: Spectral richness PSO algorithm for parameter identification of dynamical systems under non-ideal excitation conditions. Appl. Soft Comput. J. 128, 109490 (2022)
Ndunge, I.M., Maina, C.M., Irungu S.K.: Enhancing low voltage ride through capability of grid connected DFIG based WECS using WCA-PSO tuned STATCOM controller. Heliyon 8(8) (2022)
Libin, H., Xinmeng, Y., Ben, W., et al.: An improved ensemble particle swarm optimizer using niching behavior and covariance matrix adapted retreat phase. Swarm Evolut. Comput. 78, 101278 (2023)
Donglin, Z., Zuwei, H., Shikuang, L., et al.: Improved bare bones particle swarm optimization for DNA sequence design. IEEE Trans. Nanobiosci. (2022)
Wentao, M., Lihong, Q., Fengyuan, S., et al.: PV power forecasting based on relevance vector machine with sparrow search algorithm considering seasonal distribution and weather type. Energies 15(14), 5231 (2022)
Chenglong, Z., Shifei, D.: A stochastic configuration network based on chaotic sparrow search algorithm. Knowl.-Based Syst. 220, 106924 (2021)
Hao, W., Aihua, Z., Ying, H., et al.: Fast stochastic configuration network based on an improved sparrow search algorithm for fire flame recognition. Knowl.-Based Syst. 245, 108626 (2022)
Zhen, Z., Yang, H.: Discrete sparrow search algorithm for symmetric traveling salesman problem. Appl. Soft Comput. J. 118, 108469 (2022)
Jiale, H., Bo, S., Jiankai, X., et al.: A vector-encirclement-model-based sparrow search algorithm for engineering optimization and numerical optimization problems. Appl. Soft Comput. J. 131, 109777 (2022)
Bin, L., Honglei, W.: Multi-objective sparrow search algorithm: A novel algorithm for solving complex multi-objective optimisation problems. Expert Syst. Appl. 210, 118414 (2022)
Li, L.L., Xiong, J.L., Tseng, M.L., et al.: Using multi-objective sparrow search algorithm to establish active distribution network dynamic reconfiguration integrated optimization. Expert Syst. Appl. 193, 116445 (2022). https://doi.org/10.1016/j.eswa.2021.116445
Zhu, D., et al.: Human memory optimization algorithm: a memory-inspired optimizer for global optimization problems. Expert Syst. Appl. 237, 121597 (2023)
Xueliang, Z., Ying, C., Guanghua, W., et al.: A comprehensive compensation method for piezoresistive pressure sensor based on surface fitting and improved grey wolf algorithm. Measurement 207, 112387 (2023)
Zhu, D., Wang, S., Huang, Z., et al.: A JAYA algorithm based on normal clouds for DNA sequence optimization. Clust. Comput. (2023). https://doi.org/10.1007/s10586-023-04083-x
Yujun, Z., Yufei, W., Shuijia, L., Fengjuan, Y., Liuwei, T., Yuxin, Y., Juan, Z., Zhengming, G.: An enhanced adaptive comprehensive learning hybrid algorithm of Rao-1 and JAYA algorithm for parameter extraction of photovoltaic models. Math. Biosci. Eng. 19(6), 5610–5637 (2022)
Jiankai, X., Bo, S.: Dung beetle optimizer: a new meta-heuristic algorithm for global optimization. J. Supercomput. 79(7), 7305–7336 (2022)
Zhu, D., Wang, S., Zhou, C., et al.: Manta ray foraging optimization based on mechanics game and progressive learning for multiple optimization problems. Appl. Soft Comput. (2023). https://doi.org/10.1016/j.asoc.2023.110561
Xu, J., Li, T., Zhang, D., Wu, J.: Ensemble clustering via fusing global and local structure information. Expert Syst. Appl.121557, ISSN 0957-4174 (2023). https://doi.org/10.1016/j.eswa.2023.121557
Zhu, D., et al.: A multi-strategy particle swarm algorithm with exponential noise and fitness-distance balance method for low-altitude penetration in secure space. J. Comput. Sci. 74, 102149 (2023)
Lei, L., Dong, Z., Fanhua, Y., et al.: Ant colony optimization with Cauchy and greedy Levy mutations for multilevel COVID 19 X-ray image segmentation. Comput. Biol. Med. 136(prepublish), 104609 (2021)
Ming, Z.G., Juan, Z., Rong, Y.H., et al.: The challenge for the nature-inspired global optimization algorithms: non-symmetric benchmark functions. IEEE Access 9, 106317–106339 (2021)
Morteza, P.K., Farshid, K., Amid, B.K.: OWMA: an improved self-regulatory woodpecker mating algorithm using opposition-basedlearning and allocation of local memory for solving optimization problems. J. Intell. Fuzzy Syst. 40(1), 919–946 (2021)
Karimzadeh Parizi, M., Keynia, F., Bardsiri, A.K.: Woodpecker mating algorithm for optimal economic load dispatch in a power system with conventional generators. Int. J. Ind. Electron. Control Optim. 4(2), 221–234 (2021)
Heidari, A.A., Mirjalili, S., Faris, H., et al.: Harris hawks optimization: algorithm and applications. Future Gener. Comput. Syst. 97, 849–872 (2019)
Shangbin, J., Chen, W., Rui, G., et al.: Harris hawks optimization with multi-strategy search and application. Symmetry 13(12), 2364 (2021)
Helei, K., Renyun, L., Yifei, Y., et al.: Improved Harris hawks optimization for non-convex function optimization and design optimization problems. Math. Comput. Simul 204, 619–639 (2023)
Gupta, S., Deep, K., Heidari, A.A., et al.: Opposition-based learning Harris hawks optimization with advanced transition rules: principles and analysis. Expert Syst. Appl. 158(prepublish), 113510 (2020)
Lemin, P., Zhennao, C., Ali, H.A., et al.: Hierarchical Harris hawks optimizer for feature selection. J. Adv. Res. 53, 261–278 (2023)
Gharehchopogh, S.F., Abdollahzadeh, B.: An efficient harris hawk optimization algorithm for solving the travelling salesman problem. Clust. Comput. 25(3), 1981–2005 (2021)
Pradeep, J., Asghar, A.H., Huiling, C.: Elitist non-dominated sorting Harris hawks optimization: framework and developments for multi-objective problems. Expert Syst. Appl. 186, 115747 (2021)
Jafar, A.J., Amine, E.M.S.B., Sima, O., et al.: Reliability analysis based improved directional simulation using Harris hawks optimization algorithm for engineering systems. Eng. Fail. Anal. 135(prepublish), 106148 (2022)
Mohamed, Z.E., Mohd, B.N.Y., Mohammad, T., et al.: An improved Harris hawks optimization algorithm with simulated annealing for feature selection in the medical field. IEEE Access 8, 186638–186652 (2020)
Kashif, H., Nabil, N., William, Z., et al.: An efficient hybrid sine-cosine Harris hawks optimization for low and high-dimensional feature selection. Expert Syst. Appl. 176, 114778 (2021)
Fahmy, H., El-Gendy, E.M., Mohamed, M.A., et al.: ECH3OA: an enhanced chimp-Harris hawks optimization algorithm for copyright protection in color images using watermarking techniques. Knowl.-Based Syst. 269, 110494 (2023)
Xuxu, Z., Zhisheng, Y., Peng, C.: A hybrid optimization algorithm and its application in flight trajectory prediction. Expert Syst. Appl. 213, 119082 (2023)
Ines, L., Aida, Z., Mohamed, Y., et al.: A novel improved binary Harris hawks optimization for high dimensionality feature selection. Pattern Recogn. Lett. 171, 170–176 (2023)
Balaha, H.M., El-Gendy, E.M., Saafan, M.M.: CovH2SD: a COVID-19 detection approach based on Harris hawks Optimization and stacked deep learning. Expert Syst. Appl. 186, 115805 (2021)
Hamed, A., Mohamed, M.F.: A feature selection framework for anxiety disorder analysis using a novel multiview harris hawk optimization algorithm[J]. Artif. Intell. Med. 143, 102605 (2023)
Vineet, K., Veena, S., Ram, N.: Leader Harris hawks algorithm based optimal controller for automatic generation control in PV-hydro-wind integrated power network. Electric Power Syst. Res. 214, 108924 (2023)
Kumar, A.P., Kumar, V.J., Jayalakshmi, N.: Real-time and day-ahead risk averse multi-objective operational scheduling of virtual power plant using modified Harris Hawk’s optimization. Electric Power Syst. Res. 220, 109285 (2023)
ÇetınbaŞ, İ, Tamyürek, B., Demırtaş, M.: The hybrid Harris hawks optimizer-arithmetic optimization algorithm: a new hybrid algorithm for sizing optimization and design of microgrids. IEEE Access 10, 19254–19283 (2022). https://doi.org/10.1109/ACCESS.2022.3151119
Kumar, A., Dhillon, J.S.: Enhanced Harris hawk optimizer for hydrothermal generation scheduling with cascaded reservoirs. Expert Syst. Appl. 226, 120270 (2023)
Shiming, S., Pengjun, W., Asghar, A.H., et al.: Adaptive Harris hawks optimization with persistent trigonometric differences for photovoltaic model parameter extraction. Eng. Appl. Artif. Intell. 109, 104608 (2022)
Jiao, S., Chong, G., Huang, C., et al.: Orthogonally adapted Harris hawks optimization for parameter estimation of photovoltaic models. Energy 203, 117804 (2020)
Hassan, B., Muhammad, S., Özge, H., et al.: Decomposition and Harris hawks optimized multivariate wind speed forecasting utilizing sequence2sequence-based spatiotemporal attention. Energy 278, 127933 (2023)
Ayşe, B., İdiris, D.: A new binary variant with transfer functions of Harris hawks optimization for binary wind turbine micrositing. Energy Rep. 6(S9), 668–673 (2020)
Mingliang, L., Kegang, L., Qingci, Q.: A rockburst prediction model based on extreme learning machine with improved Harris hawks optimization and its application. Tunn. Underground Space Technol. Inc. Trenchless Technol. Res. 134, 104978 (2023)
Mashaleh, A.S., Ibrahim, N.F., Al-Betar, M.A., et al.: Detecting spam email with machine learning optimized with Harris hawks optimizer (HHO) algorithm. Procedia Comput. Sci. 201, 659–664 (2022)
Kamboj, K.V., Nandi, A., Bhadoria, A., et al.: An intensify Harris hawks optimizer for numerical and engineering optimization problems. Appl. Soft Comput. J. 89, 106018 (2020)
İlker, G., Burcin, F.O.: Quantum particles-enhanced multiple Harris hawks swarms for dynamic optimization problems. Expert Syst. Appl. 16(prepublish), 114202 (2020)
Sandeep, S., Abinash, S., Deba, S.P.: Improving accuracy of SVM for monthly sediment load prediction using Harris hawks optimization. Mater. Today: Proc. 61, 604–617 (2022)
Yankai, W., Shilong, W., Wenhan, Y., et al.: A digital-twin-based adaptive multi-objective Harris hawks Optimizer for dynamic hybrid flow green scheduling problem with dynamic events. Appl. Soft Comput. J. 143, 110274 (2023)
Sangeetha, J., Kumaran, U.: A hybrid optimization algorithm using BiLSTM structure for sentiment analysis. Meas.: Sens. 25, 100619 (2023)
Alamir, M.A.: An enhanced artificial neural network model using the Harris hawks optimiser for predicting food liking in the presence of background noise. Appl. Acoust. 178, 108022 (2021)
Awad, N.H., Ali, M.Z., Liang, J.J., Qu, B.Y., Suganthan, P.N.: Problem definitions and evaluation criteria for the CEC 2017 special session and competition on single objective bound constrained real-parameter numerical optimization, technical report, Nanyang Technological University (2016)
Yuni, F.A., Sirapat, C., Chitsutha, S., et al.: Joint opposite selection (JOS): a premiere joint of selective leading opposition and dynamic opposite enhanced Harris’ hawks optimization for solving single-objective problems. Expert Syst. Appl. 188, 116001 (2022)
Hussain, K., Zhu, W., Salleh, M.N.M.: Long-term memory Harris’ Hawk optimization for high dimensional and optimal power flow problems. IEEE Access 7, 147596–147616 (2019)
Abdollahi, A.D., Safaa, A.S., Seyedali, M., et al.: Nonlinear-based Chaotic Harris hawks optimizer: algorithm and internet of vehicles application. Appl. Soft Comput. J. 109, 107574 (2021)
Devan, P.A.M., Hussin, F.A., Ibrahim, R.B., Bingi, K., Nagarajapandian, M., Assaad, M.: An arithmetic-trigonometric optimization algorithm with application for control of real-time pressure process plant. Sensors 22, 617 (2022)
Khodadadi, N., Snasel, V., Mirjalili, S.: Dynamic arithmetic optimization algorithm for truss optimization under natural frequency constraints. IEEE Access 10, 16188–16208 (2022)
Priyadarshi, N., Bhaskar, M.S., Almakhles, D.: A novel hybrid whale optimization algorithm differential evolution algorithm-based maximum power point tracking employed wind energy conversion systems for water pumping applications: practical realization. IEEE Trans. Ind. Electron. 71(2), 1641–1652 (2024)
Ahmed, R., Rangaiah, G.P., Mahadzir, S., Mirjalili, S., Hassan, M.H., Kamel, S.: Memory, evolutionary operator, and local search based improved Grey Wolf Optimizer with linear population size reduction technique. Knowl.-Based Syst. 264, 110297 (2023)
Refaat, M.M., Aleem Shady, H.E.A., Atia, Y., Ali, Z.M., Sayed, M.M.: Multi-stage dynamic transmission network expansion planning using LSHADE-SPACMA. Appl. Sci. 11(5), 2155 (2021)
Fathy, A., AbdelAleem, S.H.E., Rezk, H.: A novel approach for PEM fuel cell parameter estimation using LSHADE-EpSin optimization algorithm. Int. J. Energy Res. 45(5), 6922–6942 (2020)
Nitish, C., Muhammad, A.M.: Golden jackal optimization: a novel nature-inspired optimizer for engineering applications. Expert Syst. Appl. 198, 116924 (2022)
Acknowledgements
This work is supported by the National Natural Science Foundation of China (Nos. 62272418, 62102058), Basic public welfare research program of Zhejiang Province (No. LGG18E050011).
Funding
Funding were provided National Natural Science Foundation of China (Grant Nos. 62272418, 62102058) and Basic public welfare research program of Zhejiang Province (No. LGG18E050011).
Author information
Authors and Affiliations
Contributions
C.O.: Conceptualization, Methodology, Data curation, Writing- Original draft preparation Funding acquisition. C.L.: Conceptualization, Methodology, Software, Data curation, Writing- Original draft preparation.D.Z. : Visualization, Investigation. Y.Z.: Software, Methodology. C.Z.: Conceptualization,Supervision, Funding acquisition. C.Z.:Supervision, Visualization. All authors read and approved the final manuscript.
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix 1
Appendix 2
Consider:
Minimize:
Subject to:
Where:
P = 6000LB; \({L}_{s}=14\); \({\text{E}}=30\times {1}^{6}\mathrm{ psi}\)
With bounds:
0.1 ≤ \({{\text{x}}}_{\mathrm{0,1}}\),\({{\text{x}}}_{\mathrm{0,4}}\)≤2,0.1 ≤ \({{\text{x}}}_{\mathrm{0,2}}\),\({{\text{x}}}_{\mathrm{0,3}}\)≤10.
Appendix 3
Consider:
Minimize:
Subject to:
With bounds:
0 ≤ \({{\text{x}}}_{\mathrm{1,1}}\),\({{\text{x}}}_{\mathrm{1,2}}\)≤ 100,10 ≤ \({{\text{x}}}_{\mathrm{1,3}}\), \({{\text{x}}}_{\mathrm{1,4}}\)≤ 200.
Appendix 4
Consider:
Minimize:
Subject to:
where:
With bounds:
0 ≤ \({{\text{x}}}_{\mathrm{2,1}}\),\({{\text{x}}}_{\mathrm{2,2}}\)≤100.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Ouyang, C., Liao, C., Zhu, D. et al. Compound improved Harris hawks optimization for global and engineering optimization. Cluster Comput 27, 9509–9568 (2024). https://doi.org/10.1007/s10586-024-04348-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10586-024-04348-z