Abstract
As a non-invasive monitoring method camera traps are noted as being an effective, accurate and rapid means of compiling species richness estimates of medium to large terrestrial mammals. However, crucial elements of camera trap survey design are rarely empirically addressed, which has raised the need for both a standardised and optimised camera trapping protocol. Our study confirms that an appropriate camera placement buffer and targeting areas of animal activity, contributes to more complete species richness estimates as well as significantly reducing the rate of false trigger events. However, attaining the required survey effort in terms of camera days was the most important factor in providing accurate species richness estimates. Our results suggest that reliable estimates of species richness can be achieved in open scrubland when cameras are spaced 1 × 1 km apart and left in the targeted area until a survey effort of a 1000 camera days is realised.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Thorough and accurate estimates of species richness, diversity and distribution of wildlife are essential to effectively guide conservation management strategies, policies and practices (O’Brien 2008; Tobler et al. 2008; Roberts 2011). Non-invasive monitoring with line transects (Trolle et al. 2008; Thomas et al. 2009), track and scat surveys (Sadlier et al. 2004; Gompper et al. 2006), track plate surveys (Gompper et al. 2006), scent post surveys (Gompper et al. 2006) and more recently camera trapping (Silveira et al. 2003; Roberts 2011; Tobler et al. 2008) are considered more appropriate than invasive methods (e.g., radiocollars, Balme et al. 2009) for the assessment of multiple species over large geographic ranges.
The application of camera traps in wildlife monitoring and ecology includes the compilation of species inventories (Cutler and Swann 1999; Silveira et al. 2003; Srbek-Araujo and Chiarello 2005; Kelly 2008; Srbek-Araujo and Chiarello 2013), assessing activity and habitat patterns (Cutler and Swann 1999; Maffei et al. 2002; Silveira et al. 2003; Dillon and Kelly 2007; Birdges and Noss 2011), determining species presence and distribution (Cutler and Swann 1999; Ahumada et al. 2011, 2013), survival and reproductive estimates (O’Connell et al. 2011), population density and dynamics (Cutler and Swann 1999; Karanth et al. 2004; Trolle and Kery 2005; Kelly 2008; Maffei and Noss 2008; Rowcliffe and Carbone 2008), feeding and foraging dynamics (Cutler and Swann 1999; Harmsen et al. 2010; O’Connell et al. 2011), as well as aspects of avian nest ecology (Cutler and Swann 1999; O’Connell et al. 2011).
Key elements of camera trap survey design that need to be carefully established prior to surveying include trap placement, trap spacing, trap density and trapping period (O’Connell et al. 2011; Foster and Harmsen 2012). However, when considering survey design, the question regarding the most efficient trap density, placement and arrangement has rarely been empirically addressed (Gompper et al. 2006). Trap spacing directly determines the survey gap between cameras and can therefore influence the capture probability of a species and/or specific individuals within a species (O’Brien 2011). By allocating trap spacing appropriately, the coverage of the survey area can be efficiently maximised (Foster and Harmsen 2012). Trap spacing has been given specific consideration in the context of studies addressing abundance estimation of a target species, whereby spacing is tailored specifically to the target species and the type of habitat it utilises (Karanth and Nichols 1998; Karanth et al. 2002; Dillon and Kelly 2007; O’Brien et al. 2010). However, trap spacing is also noted as a fundamental consideration for multispecies studies and/or studies utilising occupancy modelling estimators (O’Brien 2008). When considering multispecies surveys, selecting optimal trap placement for increased capture probability of specific species may result in biased placement for the detection of other species (Harmsen et al. 2010; Foster and Harmsen 2012; Mann et al. 2014).
Studies assessing terrestrial mammalian species richness vary considerably in trap spacing, including < 1 km (Trolle and Kery 2005; Di Bitetti et al. 2014), 1.5 km (Silveira et al. 2003), 2 km (Tobler et al. 2008) and varied spacing between 1.75 and > 5 km within the same study (Srbek-Araujo and Chiarello 2013). Similarly, camera trap height varied between 0.3 m and 0.5 m above ground in different studies (Gompper et al. 2006; Dillon and Kelly 2007). Camera trap arrays may be linear or grid-based and placement may be stratified, random or optimal for a particular target species (Silveira et al. 2003; Tobler et al. 2008; Harmsen et al. 2010; Ahumada et al. 2011; Espartosa et al. 2011; Foster and Harmsen 2012). Survey effort in terms of camera days also varies greatly (109–8725 days) between studies (Silveira et al. 2003; Trolle and Kery 2005; Tobler et al. 2008; Rovero and Marshall 2009; Ahumada et al. 2013; Srbek-Araujo and Chiarello 2013; Di Bitetti et al. 2014). Clearly there is a lack of standardisation in the use of camera traps across different studies, which has stimulated debate on the need for a more consistent camera trapping protocol (Cutler and Swann 1999; Dillon and Kelly 2007; Kelly 2008) that will encourage comparisons across study areas for the same species and for diversity estimates in different habitats.
A standardised camera trap protocol that will provide optimal results across all habitat types for all species is probably unrealistic. However, standardised protocols for distinctly different environments based on broadly similar vegetation structure and target species guild sizes might be feasible. An appropriate measure of standardisation would allow for comparability and assessment of generalised trends across different environments, given however that the limitations of survey design for certain species guilds such as arboreal or small (> 0.5 kg) mammals be considered. The aim of this study was to determine the most accurate and efficient camera trap placement strategy, camera density and survey duration to estimate medium-to-large mammal species (> 0.5 kg) richness and distribution within the Cape Floristic Kingdom of South Africa.
Methods
Study site
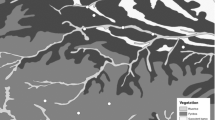
This study was conducted in the most southern part of the Table Mountain National Park (TMNP) known as the Cape of Good Hope (CoGH) section that is fenced and 80 km2 in size. To limit variables other than placement protocol and camera density influencing our results we selected an area of 2 × 2 km (4 km2) within CoGH that was as homogenous in vegetation type and structure, as well as topography as possible. The resultant site fell within the Peninsula Sandstone Fynbos vegetation type (Mucina and Rutherford 2006), with height above sea level for individual camera points ranging from 70 m to 110 m (Fig. 1). The area experiences a temperate Mediterranean climate, with distinct seasonal variation in both rainfall and temperature. Seasons are characterised by cold (averaging 7–20 °C), wet winters and warm (averaging 15–27 °C), dry summers (Mucina and Rutherford 2006; Cowling et al. 1996). The majority of the vegetation within the study site is comprised of Fynbos shrubland, which is typified by restios, ericoid shrubs, proteoid shrubs, leaf spinescence, high sedge cover and low grass cover (Rebelo et al. 2006). Historic records indicate that 23 medium and large mammals potentially occurred on the broader Cape Peninsula (Boshoff and Kerley 2001), whilst currently it is believed that there are 19 species left within the CoGH. These include eight antelope species ranging from the size of cape grysbok (Raphicerus melanotis) to eland (Taurotragus oryx), one equid the Cape mountain zebra (Equus zebra), one large rodent species the porcupine (Hystrix africaeaustralis), eight small-to-medium carnivores of which caracal (Caracal caracal) is the largest and one omnivorous primate species the chacma baboon (Papio cynocephalus ursinus). However, the current status and presence of some species are uncertain as they are known from old records or pooled species lists.

The stratified camera trap grids for both restricted placement (blue dots) and expansive placement (red dots). The dotted circle indicates one camera point that was nullified due to camera loss
Survey design
Camera spacing/density
To enable direct and unbiased comparisons between different grid spacings, a sampling area of 2 × 2 km (4 km2 study site) was populated with 25 Bushnell HD camera traps which were evenly spaced with an oblique distance of 500 m between them. From this grid we could selectively eliminate cameras in a stratified manner to provide richness estimates that cover the same area, over the same time period, but at a camera spacing of 2 × 2 km, 1 × 1 km and 0.5 × 0.5 km (Fig. 2).

A schematic representation of the camera trap grid that was established within a 4 km2 patch of Peninsula Sandstone Fynbos shrubland. The full grid incorporating 25 cameras spaced 500 m apart is shown in A. In B the density of camera traps was reduced to nine (small dots represent grid sites with no camera) by omitting data from 16 cameras and in C the density was further reduced to four cameras by omitting data from 20 cameras
Camera placement
Two camera positions were used to assess the influence of camera placement (relative to each grid point) on species accumulation curves and estimates of species richness. The first camera placement was restricted to a maximum distance of 20 m from each grid point. The second, which we refer to as expansive, allowed placement to a maximum of 120 m from each designated grid point. Final camera placement positions varied between 10 and 115 m from respective original GPS grid points.
Camera grid waypoints within the stratified grid were digitised in ArcMAP and located in the field utilising a handheld GPS device with uploaded waypoints. Upon arrival at each grid point, we searched firstly within 20 m and subsequently within 120 m for any sign of animal presence including game trails, grazing lawns, scat and spoor. In order to reduce the bias of placing camera traps for the increased capture probability of specific species, a placement protocol was devised. For the restricted placement protocol, the surveyor walked in a clockwise spiral from the digitised camera waypoint position until the 20 m buffer mark was reached. The camera would be placed at the first area of animal activity that incorporated field signs of more than one species, including tracks, scat, and/or foraging signs (Table 1). If no areas were located with activity signs of more than one species, the placement would default to the first area found with signs of at least one species. If no signs of animal activity were found at all within the 20 m buffer, the camera would be placed in an area that provided the least obscured detection arc in terms of vegetation, as well as elements of potential animal interest (rivers, streams, trail, opening/funnel in dense vegetation, etc.). For the more expansive placement protocol, the same criteria were utilised, but a clockwise spiral was walked until the 120 m buffer was reached. The more expansive approach hypothetically increases the chance of discovering a placement with multiple mammal signs. Signs of animal presence were categorised according to four levels (Table 1) and we always attempted to position the camera at a level 4 site for both 20 and 120 m buffer zones. For each camera trap site, we further categorised the trail type based on the intensity of animal use (Table 2) and recorded the strength of animal sign and proximity to point/s of interest observed (stream, rocky outcrop, drainage line, ecotone/habitat variation, none).
Camera traps were secured to wooden stakes at a height of 0.3 m from the ground surface, which would allow for the detection of both large antelope and smaller species such as mongoose (Tobler et al. 2008; Roberts 2011). Selected vegetation directly obscuring the camera detection arc was cropped in a 2 m arc in front of each camera to reduce false trigger rates associated with wind driven vegetation movement (Swann et al. 2004; Kelly 2008; Tobler et al. 2008). Care was taken to crop only the minimum selected sections of vegetation required to allow for camera placement, thereby reducing any subsequent impact on animal use. Camera placement did not include any form of baiting. The selected camera trap settings was a trade-off between limiting false triggers due to vegetation movement in response to the extreme winds experienced in this area and maximizing detection probability. A 30 s delay or interval between trigger events were selected but each trigger event comprised of three consecutive photographs to maximise identification probability. Both the sensor and flash sensitivity were set to high. Infrared flash was used to provide minimal disturbance to animals, whilst additionally reducing the risk of human theft. High speed Lexar 16 GB SD cards (class 10) were used to store images. Cameras were left to survey for 69 consecutive days within one season, namely winter. Winter was chosen as it was the first available season to conduct the survey in, whilst also potentially providing less excessively windy days (South African Weather Service 2014) and therefore potentially lowering false trigger rates.
Data analysis
SD cards were downloaded twice during the study (after 30 days and at the end of the study) and processed with the software CameraBase (Tobler 2003). Consecutive photographs of the same species at a given camera station were deemed independent if photographs were taken > 1 h apart (Bowkett et al. 2007; Tobler et al. 2008). The final dataset was filtered to only include terrestrial mammal species with an average adult weight (Skinner and Chimimba 2006) of more than 0.5 kg. Thus all small mammal and rodent species, except porcupine were excluded from analyses. Each species was also classified according to weight class and foraging group using Skinner and Chimimba (2006). Weight classes delineated small (< 5 kg), medium (< 20 kg) and large (> 20 kg) species across herbivore, carnivore and omnivore foraging groups (Skinner and Chimimba 2006). Capture frequency, defined as the number of independent sightings of a given species per 1000 camera days, was determined for each species.
Species accumulation curves were compiled for both restricted and expansive camera placement protocols at each of the three camera densities (25, 9 and 4 per 4 km2). The curve reached an asymptote when all focal species were recorded (Tobler et al. 2008). EstimateS was used to compile sample-based rarefaction curves, with 1000 randomisation runs (Colwell et al. 2004; Tobler et al. 2008). Species richness data for survey efforts of four and nine cameras per four km2 yielded a Chao’s estimated coefficient of variation (CV) of incidence distributions that were greater than 0.5 (0.85 and 0.56 respectively). This necessitated the use of Chao’s classic estimator as opposed to the bias corrected option. Survey effort of 25 cameras per four km2 yielded a Chao’s estimated CV of incidence distribution of less than 0.5, therefore substantiating the use of the bias corrected option in data analysis (Colwell 2006).
Three approaches can be utilised to account for undetected species, namely the use of parametric species abundance distribution estimators, nonparametric species richness estimators and the extrapolation of compiled species accumulation curves (O’Connell et al. 2011). The survey was conducted within one season and consequently non-parametric species richness estimators were used under the assumption that community composition remained the same, i.e., closed-community, and that variation in detection probability was minimal (Chao 2004). Non-parametric incidence-based estimators used included Incidence-based Coverage Estimator (ICE), Chao 2, first-order Jackknife (Jack 1) and second-order Jackknife (Jack 2) to estimate species richness. The relationship between trail condition at each site and species richness was assessed with Spearman’s rank correlation.
Results
Species richness and capture frequency
The camera trap survey yielded a total of 29,847 photos over the 69 day survey period. The survey was expected to yield a total survey effort of 3450 camera days, but one camera station on the restricted placement grid was not retrieved due to removal by either a chacma baboon or a human (Fig. 1). In order to prevent bias in the comparative data analysis between grids (expansive and restrictive), the associated expansive camera positioning data at the respective grid point was removed to equalize survey effort per grid type. Subsequently, the resultant survey effort for the study was 3312 camera days, or 1656 camera days per grid type (i.e., expansive and restrictive grids). Of the total photos captured, 1146 (3.84%) were of animals, whilst 28,701 (96.16%) were false trigger events. Of the animal triggered events, 897 (78.27%) were of target species (medium and large mammals), whilst 249 (21.73%) were of non-target species (Table 3 and Appendix in Table 5).
A total of 299 independent large mammalian sightings were recorded, comprising 13 mammalian species in seven different families (Table 4). The most frequently recorded species’ were bontebok (Damaliscus pygargus pygargus) (n = 115), red hartebeest (Alcelaphus buselaphus) (n = 42) and chacma baboon (n = 34). The least frequently recorded species were eland (n = 2), porcupine (n = 1) and large-spotted genet (Genetta tigrina) (n = 1). Two recorded mammalian species were excluded from analysis as they were both small rodent species (< 0.5 kg), namely vlei rat (Otomys irroratus) and four-striped field mouse (Rhabdomys pumilio). Additionally, 10 avian species and one reptile species were recorded during the survey period (Appendix in Table 5).
Camera placement: restricted versus expansive grids
Species richness estimates were higher for the expansive camera placement method (n = 13) compared to the restrictive placement (n = 10). Average capture frequencies (8.7 vs. 5.2) and the total number of sightings (187 vs. 112) were also higher for expansive versus restricted placements (Tables 3, 4 and Fig. 3). Three species, namely marsh mongoose (Atilax paludinosus), porcupine and large-spotted genet, were only detected on the expansive grid.

A comparison of the total number of species detected with time using the expansive (solid line) and restricted (dashed line) camera trap placements (EstimateS)
These patterns remained consistent with variation in camera trap density and the mean number of species recorded per camera station was significantly higher (T = − 2.36, p = 0.023, n = 24) for expansive (mean = 2.92 ± 1.5) versus restricted (mean = 1.96 ± 1.3) placement. Furthermore, of the total 9567 false trigger events, 7370 (77%) were recorded on the restricted grid, whilst only 2197 (23%) were recorded on the expansive grid.
The effects of animal sign
More placement sites with multiple signs of animals could be located using the expansive (mean = 2, max = 4) versus restricted (mean = 1, max = 3) camera trap placement protocol (Fig. 4). Similarly, the average number of species recorded per camera trap was higher for the expansive placement (avg. = 3, max = 6) when compared to the restricted placement (avg. = 2, max = 4) (Fig. 4). The number of species recorded was strongly correlated to the quality of animal sign present (Table 1) for both the expansive (R = 0.82, p < 0.0001, df = 19) and restricted (R = 0.85, p < 0.0001, df = 19) grids. Similarly, both grey rhebuck (R = 0.66; p = 0.01, df = 12) and Cape mountain zebra (R = 0.62, p = 0.05, df = 8) yielded strong positive correlations with sign quality. Species that yielded lower linear correlations included bontebok, red hartebeest and small grey mongoose, whilst the remaining species either did not yield any linear correlations or had insufficient data to run correlation tests.

The relationship exhibited between camera placement types (restricted and expansive), species richness and strength of animal sign
Camera density and survey effort
The overall shape of the rarefaction curves varied greatly with camera trap density (Fig. 5). Only at the highest camera density (cameras spaced 0.5 km apart) did the species rarefaction curve show signs of reaching an asymptote (ca. 1000 camera days or 40 survey days). The 95% confidence interval for this grid varied between ± 0.95 to ± 2.72 species, but averaged at approximately ± 2.54 species in the latter half of the survey (Fig. 5a).

Rarefaction graphs with 95% confidence intervals for expansively placed cameras at a 0.5 km spacing, b 1 km spacing and c 2 km spacing. d Rarefaction graphs of all three camera spacing designs (a, b and c) expressed over the same survey effort (camera days)
When survey effort was reduced to include a 1 km camera spacing, i.e., nine cameras per 4 km2, the rarefaction curve seemed to commence smoothing-off towards the end of the survey period at approximately 585 camera days or 65 survey days, but no asymptote was reached (Fig. 5b). The respective confidence coefficient varied between ± 0.45 and ± 1.93 species during the survey period. Conversely, the 2 km grid spacing, i.e., four cameras per 4 km2, yielded no asymptote or appropriate curve due to insufficient survey effort and resultant camera days (Fig. 5c). This is further supported by the respective confidence coefficient, which increased consistently throughout the survey period.
However, when different camera spacing is expressed over the same survey effort (camera days), similar trends and species richness estimates were obtained (Fig. 5d). At 250 camera days, all three grids produced between 7.31 and 8.07 species, whilst at 600 camera days the 1 km and 0.5 km grids produced 9.9 and 10.7 species respectively.
First order and Second order Jackknife estimators reached an asymptote after 500 camera days at the highest camera trap density (0.5 km spacing), whilst Chao 2 and ICE estimators yielded almost identical results at higher survey efforts, viz., 900 camera days (Fig. 6a). Additionally, Chao 2 and ICE estimates were similar to the observed species accumulation trend and provided closer estimates of species richness (13.5 and 14 species respectively) than either Jack 1 or 2 (14.97 and 15.96 species respectively). Although Jack 1 and Jack 2 resulted in higher estimates of species richness than the observed, a similar overall species accumulation trend was produced.

The observed (actual) and predicted (non-parametric estimators) relationship between species richness and varied camera spacing, including a 0.5 km spacing, b 1 km spacing and c 2 km spacing
At a survey effort of nine cameras per 4 km2 (1 km spacing) all estimators were higher than the actual observed species richness trend for the first 400–500 camera days (Fig. 6b). Jack 2 and Chao 2 yielded comparable results with species richness estimates similar to the observed values following 600 camera days. ICE and Jack 1 provided similar results with final species richness estimates of 11.95 and 11.97 species respectively.
When capture frequency was grouped according to weight class and foraging group, results indicated that the largest weight classes across all respective foraging groups yielded the highest measures of capture frequency (Fig. 7). This noted relationship was most apparent within the herbivore foraging group, with small herbivores yielding a 90.4% lower capture frequency than that of large herbivores. Although carnivores adhered to this noted relationship as well, the difference was less substantial than that of herbivores, with small carnivores yielding a 25% lower capture frequency that medium carnivores.

The recorded capture frequencies per mammalian foraging group, where groups have been categorized according to respective weight class
Discussion
Species richness and capture frequency
The results from this study clearly indicate that both camera trap density and placement have a significant effect on species richness estimates in a Fynbos shrubland environment. Only cameras spaced at 0.5 km provided rarefaction curves that approached an asymptote within the time frame of the study. Positioning camera traps near good quality animal sign (Table 1) by relaxing the maximum offset from the specified grid points also improved species richness estimates within the survey period. The nonparametric species richness estimators used in this study to account for undetected species, yielded species richness estimates of between 13.5 and 16 species, comprising between 79 and 94% of the total 17 expected species occurring within the CoGH (Fig. 6). Jack 1 and Jack 2 estimators yielded the closest species richness estimates to that of the expected total species occurring within the study site, whilst additionally performing better than ICE and Chao 2 estimators under lower survey efforts (< 900 camera days). The performance of lower order Jackknife estimators (Jack 1 and Jack 2) in this study concur with findings from a study conducted in tropical forest, whereby Jack 1 and Jack 2 estimators performed the best out of five estimators assessed at survey efforts exceeding 1400 camera days (Tobler et al. 2008).
Passive infrared camera traps, such as used in this study, are noted to produce less false triggers when compared to active triggered traps (Swann et al. 2011). However, this study yielded a significant quantity of false triggers, predominantly attributed to moving vegetation. Although cameras were checked and serviced after 30 days, this was not sufficient to prevent false triggers related to vegetation regrowth within the 2 m detection arc associated with camera points near rivers, streams or seasonal wetlands. A shorter service time interval (Kelly and Holub 2008; Tobler et al. 2008) can be applied to curb vegetation regrowth, but could be unfeasible in light of the required field time and human resource requirements for extensive spatial and temporal studies (O’Brien et al. 2010; Ahumada et al. 2011; Rovero et al. 2014). Furthermore, the majority of false triggers were associated with vegetation movement beyond the 2 m cleared arc, particularly restiod and graminoid vegetation. Furthermore, although increasing detection probabilities of certain species, it conversely decreases the detection probability of other species (Hamel et al. 2013). The use of SD cards with larger memory capacity, combined with the use of automated sorting software, could provide the most feasible long term solution.
Camera placement: restricted versus expansive grids
Studies throughout predominantly dense forest habitat have noted that camera placement along areas of animal activity such as trails yield higher rates of capture success of multiple or specific species (Trolle and Kery 2005; Trolle et al. 2008; Harmsen et al. 2010; Srbek-Araujo and Chiarello 2013). Similarly, our results yielded greater measures of species richness, capture frequencies and independent animal sightings by relaxing the maximum offset from the specified grid points for all species except eland and chacma baboon which yielded equal capture frequencies irrespective of placement criterion (Table 4).
Another factor greatly influencing recorded measures of species richness and capture rates was the presence of a trail and associated quality of animal sign as per the established criterion (Tables 1, 2). More established trails with a greater quality of animal signs yielded higher measures of both species richness and respective capture rates (Fig. 4). The relationship exhibited between camera placement, trail presence and increased associated species richness measures have been assessed in other studies and our results corroborate these findings (Silveira et al. 2003; Trolle and Kery 2005; Gompper et al. 2006; Harmsen et al. 2010; Srbek-Araujo and Chiarello 2013). However, both trail preference and avoidance are documented within some studies (Trolle and Kery 2005; Tobler et al. 2008; Mann et al. 2014), particularly where certain prey species (e.g., herbivores) avoid trails and/or roads where large carnivores are present. One such example indicated trail avoidance by tapir (Tapirus terrestris) and trail preference by numerous carnivore species including puma (Puma concolor) (Trolle and Kery 2005). Results from our study do not support any significant trail avoidance, but two species, namely small grey mongoose and red hartebeest, appeared to be relatively impartial to trail presence. However, the absence of large carnivore species (> 40 kg) within the CoGH might explain the lack of trail avoidance by mammals falling in the preferred prey size range of the absent predators.
Camera placement also influenced false trigger rates, which were significantly higher for restricted placements. Together, these findings suggest that both species richness estimates and false trigger events can be improved by optimising camera trap placement with respect to signs of animal presence and selecting trails. Furthermore, the cropping of vegetation is widely utilised across studies to reduce false trigger rates (Tobler et al. 2008; Trolle and Kery 2005; Swann et al. 2011). Additionally, time-lapse settings have been utilised as a further method to control for false triggers (Trolle and Kery 2005; Hamel et al. 2013).
Camera density and survey effort
Observed species richness estimates at different camera trap densities, but comparable survey efforts, were similar at 275 and 620 camera days (Fig. 5d). These findings are in accordance with those from two studies conducted in tropical forest ecosystems with South American mammal assemblages (Srbek-Araujo and Chiarello 2005; Tobler et al. 2008). Both studies reported almost identical final species richness estimates across different camera spacing, but similar survey efforts (camera days). This suggests that it is not camera density or spacing alone that is essential to compiling species richness estimates, but rather survey effort in terms of the total survey period, the resultant number of camera days and spatial coverage in terms of number of cameras. However, the assumption of population closure considered essential for assessing site occupancy dictates that studies need to be completed within more or less 70 days (O’Connell and Bailey 2011). This implies that a certain minimum number of traps will have to be used to achieve the required survey effort within the limited survey period. Another factor influencing the minimum number of cameras required is the need for spatial representation across varied habitat types within the study area when conducting both species richness and occupancy studies. Therefore, in order to maintain population closure and increase the capture probability of habitat specialist species, it is recommended that a minimum number of cameras be placed in order to maintain population closure (< 70 days) in a spatially representative manner across the varied habitat types present.
Determining the asymptote in species richness assessments provides an indication of the survey effort required to inventory the majority of species within a given study area (Silveira et al. 2003; Rovero et al. 2014; Tobler et al. 2008; Ahumada et al. 2011; Roberts 2011). Studies within forest habitat types in South America have often reached asymptotes between 500 and 1000 camera days (Tobler et al. 2008). Similarly, studies within woodland and grassland habitats reached asymptotes at approximately 400 and 870 camera days respectively (Silveira et al. 2003; Roberts 2011). The total species richness results for our study indicated that the majority (> 90%) of recorded species could be detected with a survey effort of approximately 1000 camera days, which corresponds to a study conducted within south-central Tanzania (Rovero et al. 2014). Exceptions were eland, porcupine and large-spotted genet that yielded capture frequencies below one within the study site and therefore required more than 1000 camera days to be detected. Survey effort required to capture more elusive, wide ranging and/or marginally distributed species can increase significantly, as shown in a study conducted by Tobler et al. (2008), whereby resultant survey effort could increase by three to six times of that required for more common species. As many species of conservation concern are rare and elusive, this highlights the need for long term and intensive studies that are able to accumulate the required survey effort to provide adequate detection rates.
The noted relationship between body weight/size and detection probability, whereby larger animals exhibit higher detection rates relative to that of smaller animals, was maintained for both the carnivore and herbivore foraging groups recorded in our study. Accordingly, medium carnivore and large herbivore foraging groups yielded higher rates of capture frequency than small carnivores and small herbivores respectively (Fig. 7). The groups with the highest capture frequencies were large herbivores (> 20 kg) and primates (> 10 kg), which is not only a function of the relative body size of individual animals within each species, but also the respective social organisation exhibited in most species within these groups generally being that of a gregarious nature (Boshhoff et al. 2001; Tobler et al. 2008; Harmsen et al. 2010; O’Connell et al. 2011). Although body weight/size is a crucial contributor to respective detection probability, there are exceptions as in Silveira et al. (2003) whereby certain species yielded capture frequencies contrary to their weight class. Two exceptions within our study that corresponded with these findings were eland and porcupine, which yielded the lowest recorded capture frequencies (Table 4). This could be due to low population densities on a micro-habitat level within the study site.
Empirical evaluation of the survey design, including camera placement and survey effort, are important for accurate and reliable species richness estimates when commencing large scale and long term (e.g., annual repeats) surveys. Our results confirm that camera trapping is an effective and rapid means of inventorying medium-to-large terrestrial mammals (> 0.5 kg) in a shrubland ecosystem, but that camera placement and survey effort are critical elements of a successful survey design. Furthermore, although camera placement height within our study was effective at recording species across a wide range of weight and foraging classes, it could have limited detection efficiency for smaller bodied (< 0.5 kg) and/or arboreal mammal species.
Appropriate camera placement in terms of placement buffer and targeting areas of animal activity, contributes to more complete species richness estimates as well as significantly reducing the rate of false trigger events. False trigger rates were reduced by 54% by appropriately placing cameras, which would contribute to greatly reduced time spent on data processing and collation.
Attaining the required survey effort in terms of camera days was the most important factor in providing accurate species richness estimates. A minimum of 1000 camera days was required to record the majority of species present on site, whilst three species could require up to 1600 camera days to be detected. These three species are not regarded as rare within the broader protected area, but could be sparsely distributed and/or represented within the given study site on a micro-habitat level. For the detection of more elusive species, between 1600 and 3000 camera days could be required (Tobler et al. 2008; Srbek-Araujo and Chiarello 2013). An alternate strategy for capturing very rare species could be to sample at a moderate intensity across multiple study sites, compared to sampling intensively at fewer study sites for more common species (MacKenzie and Royle 2005).
Survey design must however be tailored and focused to meet the research objectives. If species inventories are the objective, survey effort should take precedence over camera spacing and number of camera points. Conversely, if occupancy studies are the objective, then the number of camera points, i.e., spatial coverage, can be as important as the resultant survey effort per sample area (MacKenzie et al. 2002). Two assumptions impacting the resultant camera spacing that need to be considered during occupancy studies include independence and population closure (O’Connell and Bailey 2011). Our results suggest that reliable estimates of species richness can be achieved in open scrubland when cameras are spaced at a minimum of 1 × 1 km apart and left in the targeted area till a survey effort of a 1000 camera days is realised. In the case of CoGH that will imply 82 cameras deployed for 12 days. However, depending on survey area size the number of cameras and consequent spacing needs to be adjusted to meet the assumption of population closure considered to be realised in less than 70 days. Furthermore, this 1 km stratified spacing would provide the spatial representation required to determine site occupancy of species present, whilst maintaining independence as well (O’Connell and Bailey 2011). Conducting extensive surveys at a stratified grid spacing of 0.5 km would not only negate independence, but become excessively labour (time) and cost (number of cameras) intensive.
References
Ahumada JA, Silva CEF, Gajapersad K, Hallam C, Hurtado J, Martin E, McWilliam A, Mugerwa B, O’Brien T, Rovero F, Sheil D, Spironello WR, Winari N, Andelman SJ (2011) Community structure and diversity of tropical rainforest mammals: data from a global camera trap network. R Soc 366:2703–2711
Ahumada JH, Hurtado J, Lizcano D (2013) Monitoring the status and trends of tropical forest terrestrial vertebrate communities from camera trap data: a tool for conservation. PLoS ONE 8(9):1–10
Balme GA, Hunter LTB, Slotow R (2009) Evaluating methods for counting cryptic carnivores. J Wildl Manag 73(3):433–441
Birdges AS, Noss AJ (2011) Behaviour and activity patterns. In: O’Connell AF, Nichols JD, Karanth KU (eds) Camera traps in animal ecology: methods and analyses. Springer, Berlin. doi:10.1007/978-4-431-99495-4_1
Boshhoff AF, Kerley GIH, Cowling RM (2001) A pragmatic approach to estimating the distributions and spatial requirements of medium- to large-sized mammals in the Cape Floristic Region, South Africa. Divers Distrib 7:21–43
Boshoff AF, Kerley GH (2001) Potential distributions of medium-to-large sized mammals in the Cape Floristic Region, nased on historical accounts and habitat requirements. Afr Zool 36(2):245–273
Bowkett AE, Rovero F, Marshall AR (2007) The use of camera-trap data to model habitat use by antelope species in the Udzungwa Mountain forests, Tanzania. Afr J Ecol 46(4):479–487
Chao A (2004) Species richness estimation. In: Read CB, Vidakovic B (eds) Encyclopaedia of statistical sciences. Wiley, New York, pp 7909–7916
Colwell RK (2006) EstimateS 8.0.0. http://viceroy.eeb.uconn.edu/EstimateS. Accessed 9 Nov 2014
Colwell RK, Mao CX, Chang J (2004) Interpolating, extrapolating, and comparing incidence-based species accumulation curves. Ecology 85(10):2717–2727
Cowling RM, MacDonald IAW, Simmons MT (1996) The Cape Peninsula, South Africa: physiographical, biological and historical to an extraordinary hot-spot of biodiversity. Biodivers Conserv 5(5):527–550
Cutler L, Swann DE (1999) Using remote photography in wildlife ecology: a review. Wildl Soc Bull 27(3):571–581
Di Bitetti MS, Paviolo A, De Angelo C (2014) Camera trap photographic rates on roads vs. off roads: location does matter. Mastozool Neotrop 21(1):37–46
Dillon A, Kelly MJ (2007) Ocelot Leopardus pardalis in Belize: the impact of trap spacing and distance moved on density estimates. Oryx 41(4):469–477
Espartosa DK, Pinotti BT, Pardini R (2011) Performance of camera trapping and track counts for surveying large mammals in rainforest remnants. Biodivers Conserv 20:2815–2829
Foster RJ, Harmsen BJ (2012) A critique of density estimation from camera-trap data. J Wildl Manag 76(2):224–236
Gompper ME, Kays RW, Ray JC, Lapoint SD, Bogan DA, Cryan JR (2006) A Comparison of noninvasive techniques to survey carnivore communities in northeastern North America. Wildl Soc Bull 34(4):1142–1151
Hamel S, Killengreen ST, Henden J, Eide NE, Roed-Eriksen L (2013) Towards good practice guidance in using camera-traps in ecology: influence of sampling design on validity of ecological inferences. Methods Ecol Evol 4:105–113
Harmsen BJ, Foster RJ, Silver S, Ostro L, Doncaster CP (2010) Differential use of trails by forest mammals and the implications for camera-trap studies: a case study from Belize. Biotropica 42(1):126–133
Karanth KU, Nichols JD (1998) Estimating tiger densities in India from camera trap data using photographic captures and recaptures. Ecology 79:2852–2862
Karanth KU, Kumar NS, Nichols JD (2002) Field surveys: estimating absolute densities of tigers using capture-recapture sampling. In: Karanth KU, Nichols JD (eds) Monitoring tigers and their prey: a manual for researchers, managers and conservationists in Tropical Asia. Centre of Wildlife Studies, Bangalore, pp 139–152
Karanth KU, Chundawat RS, Nichols JD, Kumar NS (2004) Estimation of tiger densities in the tropical dry forests of Panna, Central India, using photographic capture-recapture sampling. Anim Conserv 7:285–290
Kelly MJ (2008) Design, evaluate, refine: camera trap studies for elusive species. Anim Conserv 11:182–184
Kelly MJ, Holub EL (2008) Camera trapping of carnivores: trap success among camera types and across species, and habitat selection by species, on Salt Pond Mountain, Giles County, Virginia. Northeast Nat 15(2):249–262
MacKenzie DI, Royle JA (2005) Designing occupancy studies: general advice and allocating survey effort. J Appl Ecol 42:1105–1114
MacKenzie DI, Nichols JD, Lachman GB, Droege S, Royle JA, Langtimm CA (2002) Estimating site occupancy rates when detection probabilities are less than one. Ecology 83(8):2248–2255
Maffei L, Noss AJ (2008) How small is too small? Camera trap survey areas and density estimates for ocelots in the Bolivian Chaco. Biotropica 40(1):71–75
Maffei L, Cu’Ellar E, Noss A (2002) Uso de trampas-c´amara para la evaluaci´on de mam´ıferos en el ecotono Chaco-Chiquitan´ıa. Rev Boliv Ecol Cons Amb 11:55–65
Mann GKH, O’Riain JM, Parker DM (2014) The road less travelled: assessing variation in mammal detection probabilities with camera traps in a semi-arid biodiversity hotspot. Biodivers Conserv 24(3):531–545
Mucina L, Rutherford MC (eds) (2006) The vegetation of South Africa, Lesotho and Swaziland. Strelitzia 19. South African National Biodiversity Institute, Pretoria
O’Brien TG (2008) On the use of automated cameras to estimate species richness for large- and medium-sized rainforest mammals. Anim Conserv 11:179–181
O’Brien TG (2011) Abundance, density and relative abundance: a conceptual framework. In: O’Connell AFN, Nichols JD, Karanth KU (eds) Camera traps in animal ecology: methods and analyses. Springer, Berlin. doi:10.1007/978-4-431-99495-4_1
O’Brien TG, Ballie JEM, Krueger L, Cuke M (2010) The wildlife picture index: monitoring top trophic levels. Anim Conserv 13:335–343
O’Connell AF, Bailey LL (2011) Inference for occupancy and occupancy dynamics. In: O’Connell AFN, Nichols JD, Karanth KU (eds) Camera traps in animal ecology: methods and analyses. Springer, Berlin. doi:10.1007/978-4-431-99495-4_1
O’Connell AF, Nichols JD, Karanth KU (2011) Camera traps in animal ecology: methods and analyses. Springer, Berlin. doi:10.1007/978-4-431-99495-4_1
Rebelo AG, Boucher C, Helme N, Mucina L, Rutherford MC (2006) Fynbos Biome. In: Mucina L, Rutherford MC (eds) The vegetation of South Africa, Lesotho and Swaziland. Strelitzia 19. South African National Biodiversity Institute, Pretoria
Roberts NJ (2011) Investigation into survey techniques of large mammals: surveyor competence and camera-trapping vs. transect-sampling. Biosci Horizo: Int J Stud Res 4(1):40–49
Rovero F, Marshall AR (2009) Camera trapping photographic rate as an index of density in forest ungulates. J Appl Ecol 46:1011–1017
Rovero F, Martin E, Rosa M, Ahumada JA, Spitale D (2014) Estimating species richness and modelling habitat preferences of tropical forest mammals from camera trap data. PLoS ONE 9(7):e103300. doi:10.1371/journal.pone.0103300
Rowcliffe JM, Carbone C (2008) Surveys using camera traps: are we looking to a brighter future? Anim Conserv 11:185–186
Sadlier LMJ, Webbon CC, Baker PJ, Harris S (2004) Methods for monitoring red foxes Vulpes vulpes and badgers Meles meles: are field signs the answer? Mamm Rev 34:75–98
Silveira L, Jacomo ATA, Alexandre J, Diniz-Filho F (2003) Camera trap, line transect census and track surveys: a comparative evaluation. Biol Conserv 114:351–355
Skinner JD, Chimimba CT (2006) The mammals of the Southern African sub-region. Cambridge University Press, Cambridge
South African Weather Service (2014) http://www.weathersa.co.za/climate/climstats.jsp. Accessed 1 Jan 2016
Srbek-Araujo AC, Chiarello AG (2005) Is camera trapping an efficient method of surveying mammals in Neotropical forests? A case study in south-eastern Brazil. J Trop Ecol 21:121–125
Srbek-Araujo AC, Chiarello AG (2013) Influence of camera-trap sampling design on mammal species capture rates and community structures in southeastern Brazil. Biota Neotrop 13(2):51–62
Swann DE, Hass CC, Dalton DC, Wolf SA (2004) Infrared-triggered cameras for detecting wildlife: an evaluation and review. Wildl Soc Bull 32:357–365
Swann DE, Kawanishi K, Palmer J (2011) Evaluating types and features of camera traps in ecological studies: a guide for researchers. In: O’Connell AF, Nichols JD, Karanth KU (eds) Camera traps in animal ecology: methods and analyses. Springer, Berlin. doi:10.1007/978-4-431-99495-4_1
Thomas L, Buckland ST, Rexstad EA (2009) Distance software: design and analysis of distance sampling surveys for estimating population size. J Appl Ecol 47:5–14
Tobler M (2003) Camera Base 1.6. http://www.atrium-biodiversity.org/tools/camerabase. Accessed 9 Nov 2014
Tobler MW, Carrillo-Percastegui SE, Pitman RL, Mares R, Powell G (2008) An evaluation of camera traps for inventorying large- and medium-sized terrestrial rainforest mammals. Anim Conserv 11:169–178
Trolle M, Kery M (2005) Camera-trap study of ocelot and other secretive mammals in the northern Pantanal. Mammalia 69(3–4):405–412
Trolle M, Noss AJ, Cordeiro JLP, Oliveira LFB (2008) Brazilian tapir density in the Pantanal: a comparison of systematic camera-trapping and line-transect surveys. Biotropica 40(2):211–217
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Dirk Sven Schmeller.
Appendix
Appendix
See Table 5.
Rights and permissions
About this article

Cite this article
Colyn, R.B., Radloff, F.G.T. & O’Riain, M.J. Camera trapping mammals in the scrubland’s of the Cape Floristic Kingdom—the importance of effort, spacing and trap placement. Biodivers Conserv 27, 503–520 (2018). https://doi.org/10.1007/s10531-017-1448-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10531-017-1448-z