
Abstract
We present a formation-control algorithm for autonomous fixed-wing air vehicles. The desired inter-vehicle positions are time-varying, and we assume that at least one vehicle has access to a measurement its position relative to the leader, which can be a physical or virtual member of the formation. Each vehicle is modeled with extended unicycle dynamics that include orientation kinematics on SO(3), speed dynamics, and strict constraints on speed (i.e., ground speed). The analytic result shows that the vehicles converge exponentially to the desired relative positions with each other and the leader. We also show that each vehicle’s speed satisfies the speed constraints. The formation algorithm is demonstrated in software-in-the-loop (SITL) simulations and experiments with fixed-wing air vehicles. To implement the formation-control algorithm, each vehicle has middle-loop controllers to determine roll, pitch, and throttle commands from the outer-loop formation control. We present SITL simulations with 4 fixed-wing air vehicles that demonstrate formation control with different communication structures. Finally, we present formation-control experiments with up to 3 fixed-wing air vehicles.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The number of applications for small and relatively inexpensive uncrewed air vehicles (UAVs) has increased dramatically for a variety of reasons, including the miniaturization of electronic components and motors; improvements in lithium battery performance, safety, and cost; and the availability of measurements from global navigation satellite systems (GNSS). Autonomous multi-vehicle systems have the potential to complete objectives that would be impossible for a single UAV and to do so with minimal human oversight. Potential applications include distributed sensing, cooperative surveillance, precision agriculture, and search and rescue. As another example, coordinated UAVs could be used in a forest-fire scenario to reduce the time required to conduct large-area surveys for search and rescue. Multiple vehicles can coordinate for tasks such as cooperative lifting, rescue missions, and transportation (Ota, 2006). Coordinated UAVs can also be used to take meteorological measurements (Mayer et al., 2012; Bonin et al., 2013; Wainwright et al., 2015; Bonin et al., 2015; Bailey et al., 2020) that can be used to identify the rotation in the wind field that occurs during severe storm formation. These applications require decentralized methods for coordinating and controlling groups of autonomous UAVs.
Surveys of multi-agent formation-control methods are presented in Ren et al. (2007), Olfati-Saber et al. (2007), Murray (2007), Cao et al. (2013), Oh et al. (2015). Many cooperative and formation control approaches have been developed for agents with double-integrator dynamics (Olfati-Saber, 2006; Ren, 2008; Cao & Ren, 2012; Lee & Singh, 2012; Punzo et al., 2014; Guo et al., 2014; Wellman & Hoagg, 2017; Yang & Fan, 2019; Lippay & Hoagg, 2022). Although double-integrator models can be a reasonable approximation for multi-rotor UAVs, they are not suitable for fixed-wing UAVs or wheeled robots, which are subject to nonholonomic constraints (Panagou et al., 2016; Qu, 2009; Low, 2011).
Fixed-wing UAVs offer a variety of advantages over rotary-wing (e.g., multi-rotor) designs. For example, multi-rotor air vehicles use thrust to provide lift. In contrast, fixed-wing aircraft use thrust to produce forward velocity, which, in turn, produces lift by inducing airflow over the wings. This typically reduces the power required for a UAV of a given mass to stay airborne, which increases flight time and payload capacity. Lower power consumption combined with the ability to glide without propulsive power for relatively long distances and to travel efficiently at high speeds are major contributing factors to the popularity of fixed-wing aircraft in commercial aviation. The primary trade-off is that a fixed-wing UAV must move through the air continuously at some minimum airspeed—below which the UAV does not produce enough lift to counteract gravity.
A variety of models have been used for controller design of fixed-wing UAVs. For example, control design can be performed using traditional aircraft dynamics models (Park et al., 2015; Gu et al., 2006; Singh et al., 2003; Mullen et al., 2016; Cordeiro et al., 2020). However, simplified models can be useful for control system design—particularly formation control design—because they involve fewer model parameters than a standard aerodynamic aircraft model. This paper presents a formation-control algorithm for fixed-wing UAVs modeled with extended unicycle dynamics that include orientation kinematics on \(\textrm{SO}(3)\), first-order speed dynamics, and a strict constraint on speed. Similar models for fixed-wing UAVs have been used in the literature (Stipanović et al., 2004; Zhang & Liu, 2013; Darbari et al., 2017; Beard et al., 2014; Panyakeow & Meshahi, 2014; de Marina et al., 2017; Yan et al., 2022; Chen et al., 2021; Wang et al., 2019; Cai et al., 2020; Hu et al., 2019; Chao et al., 2012; Ali et al., 2021; Qiu & Duan, 2014; Wang & Xin, 2013; Zhao et al., 2019; Liang et al., 2020; Yu & Liu, 2016). However, these related models do not include orientation kinematics on \(\textrm{SO}(3)\), and many do not consider constraints on speed.
Formation control algorithms for UAVs have been designed using a variety of methods. For example, Cai et al. (2020), Zhang et al. (2020), Chao et al. (2012), Qiu and Duan (2014) use model-predictive control, which can accommodate input and state constraints, but can be computationally expensive. The algorithms in Kahagh et al. (2022); Liao et al. (2017) use artificial potential fields to achieve formation control and mission objectives, whereas Liang et al. (2020); Chen et al. (2021); Yan et al. (2022); Wang and Xin (2013); Singh et al. (2003); Cordeiro et al. (2020); Lee and Lee (2021) use Lyapunov-based control design. Similarly, a variety of interagent communication structures have been explored, including leader-to-every-follower communication (Hu et al., 2019; Wang et al., 2019; Liang et al., 2020); undirected communication (Cordeiro et al., 2020; Cai et al., 2020; Ali et al., 2021; Wang & Xin, 2013; Yan et al., 2022; Zhao et al., 2019); and acyclic communication (Wang et al., 2021; Singh et al., 2003). This paper allows for any communication structure that has a spanning tree with the leader as the center vertex. Finally, we note that experimental demonstrations of formation-control algorithms for fixed-wing UAVs include Beard et al. (2006), Park et al. (2015), de Marina et al. (2017), Darbari et al. (2017), Wang et al. (2019), Liao et al. (2017).
This paper presents several new contributions. First, we present and analyze a new formation-control algorithm for fixed-wing UAVs modeled with extended unicycle dynamics. Although this new algorithm shares some features with the algorithm in Heintz and Hoagg (2020a), the algorithm in this paper has several significant improvements. Notably, the algorithm in this paper allows for a broad class of nonlinear control functions, whereas the previous work only allowed for one specific control function. Similarly, this paper allows for a broad class of barrier functions (used to enforce the speed constraints), whereas the previous work only allowed for one specific barrier function. These generalization can be useful because the control and barrier functions can be selected (i.e., tuned) for the capabilities of a specific UAV. We also note that the present paper allows for each agent to have different control and barrier functions. This generality can be useful for control of heterogeneous formations. In addition, the class of barrier functions used in this paper yield improved performance. For example, if exogenous forces (e.g., wind shear and turbulence) drive a UAV’s speed outside its allowable range, then the barrier function in this paper drives the speed back to the allowable range; the barrier function in the earlier work does not have this property. Another important advantage is that the angular velocity control in this paper can be implemented with only 2 actuators, whereas the control in the previous work generally requires 3 actuators.
A second new contribution of this paper is a systematic method for implementing the formation-control algorithm on fixed-wing UAVs. To implement the algorithm, we use middle-loop roll, pitch, and throttle controllers that are commanded by the output of the outer-loop formation control. This paper presents software-in-the-loop (SITL) simulations that demonstrate the implementation with a formation of 4 UAVs. Finally, this paper includes flight experiments with up to 3 UAVs. In these experiments, each UAV obtains feedback of its position and velocity from its onboard sensors and transmits this feedback to other UAVs over a secure ad-hoc wireless network. Some preliminary flight experiments appeared in Heintz and Hoagg (2020b), but this paper goes significantly beyond that preliminary conference publication by presenting complete stability and performance analyses as well as SITL results. In addition, the formation algorithm in this paper is substantially improved relative to the preliminary conference publication, and the experimental results in this paper are more comprehensive.
2 Notation
Let \(I_3\) be the \(3 \times 3\) identity matrix, and for \(j\in \{1,2,3\}\), let \(e_j \in {\mathbb R}^3\) be the jth column of \(I_3\). Let \(\Vert \cdot \Vert \) be the 2-norm.
The special orthogonal group \(\textrm{SO}(3)\) is the set of orthogonal matrices in \({\mathbb R}^{3 \times 3}\) with determinant one. The set of skew symmetric matrices in \({\mathbb R}^{3 \times 3}\) is denoted so(3). If \(x \in {\mathbb R}^3\), then define
The number of agents (i.e., UAVs) is denoted by the positive integer n. Define the agent index set \({\mathcal I}\triangleq \{1,2,\dots ,n\}\). Unless otherwise stated, all statements in this paper that involve the subscript i are for all \(i \in {\mathcal I}\).
3 Nonmenclature
3.1 UAV model
- \({\textrm{E}}\):
-
Inertial frame
- \(o_{\textrm{E}}\):
-
Origin of \({\textrm{E}}\)
- \(o_i\):
-
Location of ith agent (i.e., UAV)
- \(\mathbf {q_i}\):
-
Position of \(o_i\) relative to \(o_{\textrm{E}}\)
- \(\mathbf {p_i} \triangleq ^{\mathrm{E\cdot }}\,\,{{\mathbf {q_i}} }\):
-
Velocity of \(o_i\) relative to \(o_\textrm{E}\)
- \(q_i \triangleq \mathbf {q_i} \vert _{\textrm{E}}\):
-
ith agent position
- \({\textrm{F}}_i\):
-
ith agent velocity frame
- \(R_i\):
-
Rotation matrix from \({\textrm{F}}_i\) to \({\textrm{E}}\)
- \(s_i\):
-
Speed of ith agent
- \(\underline{s}_i \ge 0\):
-
Minimum allowable speed
- \({\bar{s}}_i > \underline{s}_i\):
-
Maximum allowable speed
- \({\mathcal S}_i \triangleq (\underline{s}_i, {\bar{s}}_i)\):
-
Set of allowable speeds
- \(v_i \in {\mathbb R}^3\):
-
Unit vector such that \(\mathbf {p_i} \vert _{\mathrm{F_i}} = s_i v_i\)
- \(f_i\):
-
Speed dynamics
- \(g_i\):
-
Speed dynamics input function
- \(u_i\):
-
Speed dynamics control input
- \(\omega _i\):
-
Angular velocity control input
- \(y_i \triangleq R_i v_i\):
-
Pointing direction
- \(o_\textrm{g}\):
-
Location of leader
- \(\mathbf {q_{\textrm{g}}}\):
-
Position of \(o_{\textrm{g}}\) relative to \(o_{\textrm{E}}\)
- \(\mathbf {p_{\textrm{g}}} \triangleq ^{\mathrm{E\cdot }}\,\,{{\mathbf {q_{\textrm{g}}}} }\):
-
Velocity of \(o_{\textrm{g}}\) relative to \(o_{\textrm{E}}\)
- \(q_{\textrm{g}} \triangleq \mathbf {q_{\textrm{g}}} \vert _ \textrm{E}\):
-
Leader position
- \(\chi _i\):
-
Desired time-varying position for \(o_i\) relative to \(o_{\textrm{g}}\) resolved in \({\textrm{E}}\)
- \(\chi _{ij}\):
-
Desired time-varying position for \(o_i\) relative to \(o_j\) resolved in \({\textrm{E}}\)
- \({\textrm{F}}_{\textrm{g}}\):
-
Leader velocity frame
- \(R_{\textrm{g}}\):
-
Rotation matrix from \({\textrm{F}}_{\textrm{g}}\) to \({\textrm{E}}\)
- \(\upsilon _i \in {\mathbb R}^3\):
-
Desired position of \(o_i\) relative to \(o_{\textrm{g}}\) resolved in \({\textrm{F}}_{\textrm{g}}\)
- \(\kappa _i > 0\):
-
Parameter in Assumption 1
3.2 Formation control algorithm
- \(\mu _i\):
-
Scalar function for control
- \(\rho _i(x) \triangleq \mu _i(\Vert x\Vert ^2)x\):
-
Control function
- \(\bar{\rho }_i \triangleq \sup _{x \in {\mathbb R}^3} \Vert \rho _i(x) \Vert \):
-
Least upper bound on \(\Vert \rho _i\Vert \)
- \(\rho _i^\prime \):
-
Gradient of \(\rho _i\)
- \(\beta _i \ge 0\):
-
Gain on the ith agent’s position error with leader
- \(\beta _{ij} \ge 0\):
-
Gain on the ith agent’s position error with agent j
- \(\xi _i\):
-
Formation-error function
- \(k_i \in (0,\kappa _i/\bar{\rho }_i)\):
-
Gain used in desired velocity
- \(p_{\textrm{d,i}} \triangleq \dot{q}_\textrm{g}+ \dot{\chi }_i +k_i \rho _i(\xi _i)\):
-
Desired velocity
- \(s_{\textrm{d,i}} \triangleq \Vert p_{\textrm{d,i}}\Vert \):
-
Desired speed
- \(\varepsilon _i \triangleq \kappa _i - k_i \bar{\rho }_i > 0\):
-
Parameter for \({\mathcal S}_{\textrm{d,i}}\)
- \({\mathcal S}_{\textrm{d,i}} \triangleq (\underline{s}_i + \varepsilon _i, {\bar{s}}_i - \varepsilon _i )\):
-
Set of allowable desired speeds
- \(y_{\textrm{d,i}} \triangleq p_{\textrm{d,i}} / s_{\textrm{d,i}}\):
-
Desired pointing direction
- \(h_i\):
-
Speed barrier function
- \(h_i^\prime \):
-
Gradient of \(h_i\)
- \(a_i,b_i > 0\):
-
Gains for \(u_i\) control law
- \(c_i > 0\):
-
Gain for \(\omega _i\) control law
3.3 Stability analysis
- \({\tilde{q}}_i \triangleq q_\textrm{g}- \chi _i\):
-
Position error
- \({\tilde{s}}_i \triangleq s_i - s_{\textrm{d,i}}\):
-
Speed error
- \({\tilde{y}}_i \triangleq y_i - y_{\textrm{d,i}}\):
-
Pointing direction error
3.4 Implementation
- \(\psi _i, \theta _i, \phi _i\):
-
Yaw, pitch, roll Euler angles
- \(\psi _\textrm{g}, \theta _\textrm{g}, \phi _\textrm{g}\):
-
Yaw, pitch, roll Euler angles of the leader
- \(\theta _{\textrm{d,i}} \):
-
Pitch angle command
- \(\phi _{\textrm{d,i}}\):
-
Roll angle command
- \(T_{i}\):
-
Throttle command
- \(\sigma _i\):
-
Heading angle
- \(\gamma _i\):
-
Flight-path angle
- \(\sigma _{\textrm{d,i}}\):
-
Desired heading angle
- \(\gamma _{\textrm{d,i}}\):
-
Desired flight-path angle
- \(k_{\gamma _i,\textrm{p}}, k_{\gamma _i,\textrm{i}}, k_{\gamma _i,\textrm{d}} > 0\):
-
PID gains for pitch control
- \(k_{\sigma _i,\textrm{p}}, k_{\sigma _i,\textrm{i}}, k_{\sigma _i,\textrm{d}} > 0\):
-
PID gains for roll control
- \(g = 9.81~\textrm{m}/\textrm{s}^2\):
-
Acceleration due to gravity
- \(s_{\textrm{a,i}}\):
-
Airspeed
- \(\eta _{0}>0\):
-
Trim-throttle parameter
- \(\eta _{\phi }>0\):
-
Trim-roll parameter
- \(s_{\mathrm{a_0}}>0\):
-
Trim-airspeed parameter
- \(\eta _{s}>0\):
-
Gain for throttle control
- \(k_{s_i,\textrm{p}}, k_{s_i,\textrm{i}} >0\):
-
PI gains for throttle control
- \(\sigma _{\textrm{g}}\):
-
Leader heading angle
- \(\gamma _{\textrm{g}}\):
-
Leader flight-path angle
- \(\omega _\textrm{g}\):
-
Angular velocity of \(\textrm{F}_\textrm{g}\) relative to \(\textrm{E}\) resolved in \(\textrm{F}_\textrm{g}\)
4 UAV model and formation control objectives
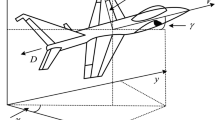
Let \(\textrm{E}\) be an inertial frame, that is, a frame in which Newton’s second law is valid. The origin of \(\textrm{E}\) is \(o_{\textrm{E}}\), which is any convenient point on the Earth’s surface. Let \(o_i\) be the location of the ith agent (e.g., the location of the ith vehicle’s center of mass). The position of \(o_i\) relative to \(o_{\textrm{E}}\) is \(\mathbf {q_i}\), and the ith agent’s position \(\mathbf {q _i}\) is resolved in \(\textrm{E}\) as \(q_i \triangleq \mathbf {q_i} \vert _{\textrm{E}}\). The velocity of \(o_i\) relative to \(o_{\textrm{E}}\) with respect to \(\textrm{E}\) is \(\mathbf {p_i} \triangleq ^{\textrm{E}\cdot }\,\,{{\mathbf {q_i}} }\).
Let \(\textrm{F}_i\) be a frame such that \(\mathbf {p_i}\) resolved in \(\textrm{F}_i\) is \(\mathbf {p_i} \vert _{\mathrm{F_i}} = s_i v_i\), where \(v_i \in {\mathbb R}^3\) is a constant unit vector, and for all \(t\ge 0\), \(s_i(t) \ge 0\) is the speed of the ith agent. For all \(t \ge 0\), the speed of the ith agent is subject to the constraint that \(s_i(t) \in {\mathcal S}_i \triangleq (\underline{s}_i, {\bar{s}}_i)\), where \(0 \le \underline{s}_i < {\bar{s}}_i\).
Let \(R_i:[0,\infty ) \rightarrow \text{ SO }(3)\) be the rotation matrix from \(\textrm{F}_i\) to \(\textrm{E}\). Thus, the ith agent’s velocity \(\mathbf {p_i}\) resolved in \(\textrm{E}\) is \(\mathbf {p_i} \vert _{\textrm{E}} = s_i R_i v_i\), which implies that
where \(q_i(t) \in {\mathbb R}^3\), \(s_i(t) \in {\mathcal S}_i\), and \(R_i^\textrm{T}(t) \in \textrm{SO}(3)\) are the position, speed, and orientation of the ith agent, and \(q_i(0) \in {\mathbb R}^3\) is the initial condition.
The speed of the ith agent satisfies
where \(u_i:[0,\infty )\rightarrow {\mathbb R}\) is the control input, \(s_i(0) \in {\mathcal S}_i\) is the initial condition, and \(f_i: [0,\infty ) \rightarrow {\mathbb R}\) and \(g_i:[0,\infty ) \rightarrow {\mathbb R}\backslash \{0 \}\) are continuous.
The orientation kinematics of the ith agent are
where \(R_i(0) \in \textrm{SO}(3)\) is the initial condition, and the control input \(\omega _i:[0,\infty ) \rightarrow {\mathbb R}^3\) is the angular velocity of \(\textrm{F}_i\) relative to \(\textrm{E}\) resolved in \(\textrm{F}_i\).
The vehicle model (1)–(3) is an extended unicycle model that includes both speed dynamics (2) and orientation kinematics (3) on SO(3). Note that the unit vector in the direction of the velocity \(\dot{q}_i\) is given by
Next, let \(o_\textrm{g}\) be the location of the leader, which can be a physical agent (e.g., vehicle) or a virtual agent. The position of \(o_\textrm{g}\) relative to \(o_\textrm{E}\) is \(\mathbf {q_\textrm{g}}\), and the velocity of \(o_\textrm{g}\) relative to \(o_\textrm{E}\) with respect to \(\textrm{E}\) is \(\mathbf {p_\textrm{g}} \triangleq ^{\mathrm{E\cdot }}\,\,{{\mathbf {q_\textrm{g}}}}\). The leader’s position \(\mathbf {q_\textrm{g}}\) is resolved in \(\textrm{E}\) as \(q_\textrm{g}\triangleq \mathbf {q_\textrm{g}} \vert _\textrm{E}\), which is assumed to be twice continuously differentiable.
Let \(\chi _i:[0,\infty )\rightarrow {\mathbb R}^3\) be the time-varying desired position of \(o_i\) relative to \(o_\textrm{g}\) resolved in \(\textrm{E}\). Thus, \(\chi _{ij} \triangleq \chi _i - \chi _j\) is the time-varying desired position of \(o_i\) relative to \(o_j\) resolved in \(\textrm{E}\). The objective is to design controls \(u_i\) and \(\omega _i\) such that:
-
(O1)
For all \(i \in {\mathcal I}\), \(\lim _{t \rightarrow \infty } [q_i(t)-q_\textrm{g}(t) - \chi _i(t)] = 0\).
-
(O2)
For all \(i \in {\mathcal I}\), \(\lim _{t \rightarrow \infty } [\dot{q}_i(t) - \dot{q}_\textrm{g}(t) - \dot{\chi }_i(t)]=0\).
-
(O3)
For all \(i \in {\mathcal I}\) and for all \(t \ge 0\), \(s_i(t) \in {\mathcal S}_i\).
Objective (O1) states that each agent approaches its desired relative position with the leader, and (O2) states that each agent approaches its desired relative velocity with the leader. Objective (O3) states that the agents’ speed constraints are satisfied. Although the formation control problem is described in 3 dimensions, the methods in this paper can be specialized to the planar case (i.e., 2 dimensions).
One specialization of the time-varying formation control problem described by (O1)–(O3) is the situation where the desired position of \(o_i\) relative to \(o_\textrm{g}\) is constant in a leader-fixed frame (e.g., a frame that rotates with the leader). For example, let \(\textrm{F}_\textrm{g}\) be a frame that is fixed to \(o_\textrm{g}\) and rotates such that one of its orthogonal unit vectors is aligned with the leader’s velocity vector \(\mathbf {p_\textrm{g}}\). In this case, we can consider the time-varying desired positions \(\chi _i(t) = R_\textrm{g}(t) \upsilon _i\), where \(R_\textrm{g}:[0,\infty ) \rightarrow \text{ SO }(3)\) is the rotation matrix from \(\textrm{F}_\textrm{g}\) to \(\textrm{E}\), and \(\upsilon _i \in {\mathbb R}^3\) is the desired position of \(o_i\) relative to \(o_\textrm{g}\) resolved in \(\textrm{F}_\textrm{g}\). Thus, the desired relative positions are constant in the leader-fixed frame \(\textrm{F}_\textrm{g}\). In this case, (O1) and (O2) imply that the formation translates with the leader’s position and rotates with the leader’s velocity vector.
Next, we note that it is not possible to satisfy the formation objectives (O1) and (O2) and the speed constraint (O3) for an arbitrary leader trajectory \(q_\textrm{g}\) and time-varying desired formation \(\chi _i\). Specifically, if (O2) is satisfied, then the ith agent’s velocity \(\dot{q}_i\) converges to \(\dot{q}_\textrm{g}+ \dot{\chi }_i\). Thus, (O2) implies that we want the ith agent’s speed \(s_i(t)\) to equal \(\Vert \dot{q}_\textrm{g}(t) + \dot{\chi }_i(t) \Vert \). However, (O3) requires that \(s_i(t) \in {\mathcal S}_i\). Thus, if \(s_i(t)\) equals \(\Vert \dot{q}_\textrm{g}(t) + \dot{\chi }_i(t) \Vert \) and satisfies \(s_i(t) \in {\mathcal S}_i\), then the leader trajectory must satisfy \(\Vert \dot{q}_\textrm{g}(t) + \dot{\chi }_i(t) \Vert \in {\mathcal S}_i\). Therefore, we make the following assumption.
Assumption 1
There exists \(\kappa _i > 0\) such that for all \(t \ge 0\), \(\Vert \dot{q}_\textrm{g}(t) + \dot{\chi }_i(t) \Vert \in (\underline{s}_i+\kappa _i, {\bar{s}}_i-\kappa _i)\).
Assumption 1 implies that for all \(t \ge 0\), \(\Vert \dot{q}_\textrm{g}(t) + \dot{\chi }_i(t) \Vert \) is contained in a proper subset of \({\mathcal S}_i\). As \(\kappa _i\) approaches zero, Assumption 1 approaches the condition \(\Vert \dot{q}_\textrm{g}(t) + \dot{\chi }_i(t) \Vert \in {\mathcal S}_i\), which is necessary to satisfy \(\dot{q}_i(t)\) equals \(\dot{q}_\textrm{g}(t) + \dot{\chi }_i(t)\) and \(\Vert \dot{q}_i(t) \Vert \in {\mathcal S}_i\).
5 Formation control algorithm
Let \(\mu _i: [0,\infty ) \rightarrow (0,\infty )\) be continuously differentiable and satisfy the following conditions:
-
(C1)
\(M_i(z) \triangleq \int _0^z \mu _i(w) \, \textrm{d}w\) is radially unbounded.
-
(C2)
\(\sup _{z \ge 0} \sqrt{z} \mu _i(z)\) exists.
Consider the control function \(\rho _i: {\mathbb R}^3 \rightarrow {\mathbb R}^3\) defined by
and note that it follows from (5) and (C2) that
exists. The control function \(\rho _i\) is used to design a desired velocity for each UAV. The formation method in Heintz and Hoagg (2020a) also uses a nonlinear control function to design a desired velocity. However, Heintz and Hoagg (2020a) considers only one specific control function. In contrast, this work allows for a broad class of functions \(\rho _i\) based on the choice of \(\mu _i\), which need only satisfy (C1) and (C2). It is also worth noting that, unlike Heintz and Hoagg (2020a), this work allows for each agent to have a different control function (i.e., \(\rho _i \ne \rho _j\) for \(i\ne j\)). This generality can be useful for control of heterogeneous formations. The following examples of \(\mu _i\) satisfy (C1) and (C2).
Example 1
Let
where \(\nu _1,\nu _2 >0\) and \(m \in [0.5,1]\). If \(\nu _1 \gg \nu _2\), then (5) implies that for all x such that \(\Vert x \Vert \ll \nu _1 / \nu _2\), \(\rho _i(x) \approx \nu _1^{-m} x\), which implies that \(\rho _i\) is approximately linear. In contrast, if \(\nu _2 \gg \nu _1\), then (5) implies that for all x such that \(\Vert x \Vert \gg \nu _1 / \nu _2\), \(\rho _i(x) \approx (\nu _2 \Vert x \Vert ^2)^{-m} x\), which has approximately constant magnitude for \(m=0.5\). \(\triangle \)
Example 2
Let
where \(\nu _1 = \frac{10\sqrt{6}}{9}-3 \) and \(\nu _2 = 2-\frac{7\sqrt{6}}{9}\). For all x such that \(\Vert x \Vert \in [0,0.5)\), \(\rho _i(x) = x\), which is linear. For all x such that \(\Vert x \Vert \in [1.5,\infty )\), \(\rho _i(x) = x/\Vert x\Vert \), which has constant magnitude. Finally, note that \(\mu _i\) is monotonically decreasing on \([0.5,\infty )\). \(\triangle \)
Example 3
Let
where \(\nu _1 = \frac{75 \sqrt{10}}{4} - \frac{100}{3}\) and \(\nu _2 = \frac{2000}{27}-\frac{2375 \sqrt{10}}{54}\). Similar to Example 2, \(\rho _i(x)\) is linear if \(\Vert x \Vert \) is small, and \(\rho _i(x)\) has constant magnitude if \(\Vert x \Vert \) is large. However, \(\mu _i\) is monotonically increasing on [0.1, 0.4] and then monotonically deceasing on \([0.4,\infty )\). \(\triangle \)
Figure 1 shows \(\mu _i\) and \(\Vert \rho _i \Vert \), where \(\mu _i\) is given by Example 1 (\(\nu _1 = \nu _2 = 1\), \(m = 0.5\)), Example 2, and Example 3. For all 3 examples, \(\bar{\rho }_i = 1\). Notice that Example 1 and Example 2 are such that for all \(z \ge 0\), \(\mu _i(z) \le 1\), which implies that \(\Vert \rho _i(x) \Vert \le \Vert x\Vert \). In contrast, Example 3 is such that for all \(z \in (0.1,1)\), \(\mu _i(z) > 1\), which implies that \(\Vert \rho _i(x) \Vert > \Vert x\Vert \) over a subset of the domain.

Examples of \(\mu _i\) and the corresponding \(\Vert \rho _i \Vert \). Example 1 is shown with with \(\nu _1=1\), \(\nu _2=1\), and \(m=0.5\)
Define the formation-error function
where \(\beta _i \ge 0\) is the gain on the ith agent’s position error with the leader, and \(\beta _{ij} \ge 0\) is the gain on the ith agent’s position error with agent j. Note that \(\xi _i\) is a linear combination of the ith agent’s position error with the leader and the other agents.
To explain the required interagent communication structure, define
and let \(B \in {\mathbb R}^{n \times n}\) be such that the (i, j)th element is \(B_{(i,j)} = -\beta _{ij}\), and the (i, i)th element is \(B_{(i,i)} = \sum _{j \in {\mathcal I}\backslash \{i\} } \beta _{ij}\). The matrix B is the weighted Laplacian of the directed graph \({\mathcal G}= ({\mathcal I},{\mathcal E})\), where the edge set is defined as \({\mathcal E}\triangleq \{ (i,j) \in {\mathcal I}\times {\mathcal I}:\beta _{ij} > 0 \}\). The algorithm in this paper requires that the gains \(\beta _i \ge 0\) and \(\beta _{ij} \ge 0\) are such that \(A+B\) is nonsingular. A sufficient condition for nonsingularity of \(A+B\) is given by (Zhang & Lewis, 2012, Lemma 1). Specifically, \(A+B\) is nonsingular if the directed graph \({\mathcal G}= ({\mathcal I},{\mathcal E})\) has a vertex \(l \in {\mathcal I}\) such that \(\beta _l >0\) and there is a walk from l to every other vertex. Thus, this paper requires that only one agent has access to a measurement of its position relative to the leader.
Let \(k_i \in (0,\kappa _i/{\bar{\rho }}_i)\) be a gain used to determine the ith agent’s desired velocity, which is defined by
In addition, define the ith agent’s desired speed
Since \(\bar{\rho }_i = \sup _{x \in {\mathbb R}^3} \Vert \rho _i(x) \Vert \) exists, it follows that all terms in (7) are bounded. Thus, the desired speed \(s_{\textrm{d,i}}\) is bounded. Next, define
The following result shows that the desired speed is not only bounded, but also is such that for all \(t \ge 0\), \(s_{\textrm{d,i}}(t)\) is in \({\mathcal S}_{\textrm{d,i}}\), which is a proper subset of the set of allowable speeds \({\mathcal S}_i\). This fact is obtained from applying the triangle inequality to (7) and (8) and using Assumption 1.
Fact 1
For all \(t \ge 0\), \(s_{\textrm{d,i}}(t) \in {\mathcal S}_{\textrm{d,i}} \subset {\mathcal S}_i\).
Next, define the desired pointing direction
and note that it follows from Fact 1 that for all \(t \ge 0\), \(s_{\textrm{d,i}}(t) > 0\), which implies that \(y_{\textrm{d,i}}\) is well defined.
To enforce the speed constraint (O3), we consider a speed barrier function \(h_i: [0,\infty ) \rightarrow {\mathbb R}\), which is continuously differentiable. The gradient of \(h_i\) is \(h_i^\prime : [0,\infty ) \rightarrow {\mathbb R}\) defined by
We assume that \(h_i\) satisfies the following conditions:
-
(B1)
For all \(s\in {\mathcal S}_i\), \(h_i(s) > 0\).
-
(B2)
For all \(s \in (-\infty ,\underline{s}_i) \cup ({\bar{s}}_i,\infty )\), \(h_i(s) < 0\).
-
(B3)
For all \(s \ge {\bar{s}}_i\), \(h_i^\prime (s) < 0\).
-
(B4)
For all \(s \le \underline{s}_i\), \(h_i^\prime (s) > 0\).
-
(B5)
For all \((s,s_{\textrm{d}}) \in {\mathcal S}_i \times {\mathcal S}_{\textrm{d,i}}\), \(h_i(s)+(s_{\textrm{d}}-s) h_i^\prime (s) > 0\).
Note that (B1) and (B2) imply that \(h_i\) is positive inside \({\mathcal S}_i\), equal to zero at the upper limit \({\bar{s}}_i\) and lower limit \(\underline{s}_i\), and negative elsewhere. In addition, (B3) and (B4) imply that \(h_i\) is strictly decreasing above the upper limit \({\bar{s}}_i\) and strictly increasing below the lower limit \(\underline{s}_i\). Finally, (B5) is a technical condition needed to ensure the the formation control is well defined. The next result provides sufficient conditions to ensure that (B3)-(B5) are satisfied.
Fact 2
Assume that (B1) and (B2) are satisfied, and assume that \(h_i^\prime \) is continuously differentiable and strictly decreasing. Then, (B3)-(B5) are satisfied.
Proof
Since \(h_i^\prime \) is continuous, it follows from (B1) and (B2) that \(h_i^\prime ({\bar{s}}_i) <0\). Since, in addition, \(h_i^\prime \) is strictly decreasing, it follows that for all \(s \ge {\bar{s}}_i\), \(h_i^\prime (s) < 0\), which confirms (B3).
Similarly, since \(h_i^\prime \) is continuous, it follows from (B1) and (B2) that \(h_i^\prime (\underline{s}_i) >0\). Since, in addition, \(h_i^\prime \) is strictly decreasing, it follows that for all \(s \le \underline{s}_i\), \(h_i^\prime (s) > 0\), which confirms (B4).
To prove (B5), let \(i\in {\mathcal I}\) and let \(s_\textrm{d}\in {\mathcal S}_{\textrm{d,i}}\). Define
and note that (B3) and (B4) imply that \(H({\bar{s}}_i) = (s_{\textrm{d}} - {\bar{s}}_i) h_i^\prime ({\bar{s}}_i) > 0\) and \(H(\underline{s}_i) = (s_{\textrm{d}} - \underline{s}_i) h_i^\prime (\underline{s}_i) > 0\). Next, define
Assume for contradiction that there exists \(z_1 \in {\mathcal S}_i\) such that \(H(z_1) \le 0\). Since, in addition, \(H({\bar{s}}_i) > 0\) and \(H(\underline{s}_i) > 0\), it follows that there exists \(z_2 \in {\mathcal S}_i\) such that \(H^\prime (z_2) = 0\) and \(H(z_2) \le 0\). Since \(h_i^\prime \) is continuously differentiable and strictly decreasing, it follows that \(\left. \frac{\textrm{d}h_i^\prime (s)}{\textrm{d}s} \right| _{s=z_2}<0\). Since, in addition, \(H^\prime (z_2) = 0\), it follows the definition of \(H^\prime \) that \(z_2=s_\textrm{d}\). Thus, \(H(z_2) = h_i(s_\textrm{d})\), and since \(s_\textrm{d}\in {\mathcal S}_{\textrm{d,i}} \subset {\mathcal S}_i\), it follows from (B1) that \(H(z_2)>0\), which is a contradiction. \(\square \)
The formation method in Heintz and Hoagg (2020a) also uses a barrier function to enforce speed constraints. However, Heintz and Hoagg (2020a) considers only one specific barrier function. In contrast, this work allows for a broad class of barrier functions \(h_i\), which need only satisfy (B1)-(B5). The barrier-function method in this paper has several other advantages over the previous work. First, the barrier function in this paper is significantly simpler than that in the previous work; notably, \(h_i\) is a function of only speed \(s_i\), whereas the method in Heintz and Hoagg (2020a) uses a function of \(s_i\) and \(s_{\textrm{d,i}}\). Second, the method in Heintz and Hoagg (2020a) can result in comparatively slow response when the speed \(s_i\) is near the boundary of \({\mathcal S}_i\). In contrast, the barrier function in this paper can be selected to yield fast response near the boundary of \({\mathcal S}_i\). We also note that this work allows for each agent to have a different barrier function, which can be useful for heterogeneous formations in which the capabilities of each vehicle dictates the allowable aggressiveness each vehicle’s barrier function. Finally, if at some time \(\tau \ge 0\), the speed \(s_i(\tau )\) is outside \({\mathcal S}_i\), then the barrier function in Heintz and Hoagg (2020a) does not drive the speed \(s_i\) into \({\mathcal S}_i\). In contrast, the analysis in the following section demonstrates that the generalized-and-improved barrier function in this paper does drive \(s_i\) into \({\mathcal S}_i\). This property is of practical significance because disturbances (e.g., wind) could force the speed outside of \({\mathcal S}_i\). The following 3 examples of \(h_i\) satisfy (B1)–(B5).
Example 4
Let \(\nu >0\), and let \(h_i(s) = \nu ({\bar{s}}_i - s)(s- \underline{s}_i)\). \(\triangle \)
Example 5
Let \(\nu >0\), and let \(h_i(s) = \tanh \big (\nu ({\bar{s}}_i - s)(s- \underline{s}_i) \big )\). \(\triangle \)
Example 6
Let \(\nu \in (0,({\bar{s}}_i - \underline{s}_i)/2)\), and let
Note that for all \(s \in [\underline{s}_i +\nu , {\bar{s}}_i-\nu ]\), \(h_i(s)=1\). \(\triangle \)
Figure 2 shows \(h_i\) and \(h_i^\prime \), where \(h_i\) is given by Examples 4–6. Example 4 is similar to the barrier function in Heintz and Hoagg (2020a) (but simpler that than in the previous work because it does not depend on \(s_{\textrm{d,i}}\)). In Example 4, \(h_i\) is quadratic, and \(h_i^\prime \) is linear. In this case, if s is near the boundary of \({\mathcal S}_i\), then \(\vert h_i(s) \vert< < 1\), and the control \(u_i\) (presented below) is small in magnitude and results in slow responses. In contrast, the barrier functions in Examples 5 and 6 have comparatively steep slope near the boundary of \({\mathcal S}_i\). Thus, \(\vert h_i(s) \vert \) is small over a comparatively smaller region near the boundary of \({\mathcal S}_i\). This results in faster responses when the speed is near the boundary of \({\mathcal S}_i\).

Next, the time derivatives of \(p_{\textrm{d,i}}\), \(s_{\textrm{d,i}}\), \(y_{\textrm{d,i}}\) are given by
where the gradient of \(\rho _i\) is \(\rho _i^\prime : {\mathbb R}^3 \rightarrow {\mathbb R}^{3 \times 3}\) defined by
Finally, consider the formation control laws
and
where \(a_i, b_i, c_i > 0\) are control gains.
Note that (14) is continuous, which can be confirmed by evaluating both expressions in (14) at the boundary of \({\mathcal S}_i\). In addition, (B3)-(B5) imply that the denominators in (14) are nonzero.
One important advantage of the formation control presented in this paper relative to that in Heintz and Hoagg (2020a) is that (15) can typically be implemented with one fewer actuator. The approach in Heintz and Hoagg (2020a) generally requires 3 actuators to implement the angular velocity command \(\omega _i\). In other words, \(\omega _i\) evolves in \({\mathbb R}^3\) rather than a lower dimensional subspace of \({\mathbb R}^3\). In contrast, the angular velocity command (15) evolves in a 2-dimensional subspace, specifically, for all \(t \ge 0\), \(v_i^\textrm{T}\omega _i(t) = 0\). For example, if \(v_i = e_1\), then \(\omega _i\) is in the span of \(e_2\) and \(e_3\), that is, \(e_1^\textrm{T}\omega _i = 0\). In particular, \(\omega _i\) evolves in the plane that is perpendicular to the direction of flight (i.e., \(\mathbf {p_i}\)). Thus, \(\omega _i\) can be generated by a pair of \(\textrm{F}_i\)-fixed actuators that generate angular velocities in the plane perpendicular to \(\mathbf {p_i}\).
The control (5)–(15) involves \(\mu _i\) and \(h_i\) as well as the parameters \(a_i,b_i,c_i > 0\), \(k_i \in (0,\kappa _i / \bar{\rho }_i)\), and \(\beta _i,\beta _{ij} \ge 0\).
Increasing the speed gains \(a_i\) and \(b_i\) tends to cause the speed \(s_i\) to converge more quickly to the desired speed \(s_{\textrm{d,i}}\). Similarly, increasing the attitude gain \(c_i\) tends to cause the pointing direction \(y_i\) to converge more quickly to the desired pointing direction \(y_{\textrm{d,i}}\). However, increasing \(a_i\), \(b_i\), and \(c_i\) also tends to increase the magnitude of the controls \(u_i\) and \(\omega _i\). In practice, it may be useful to allow for time-varying speed and attitude gains. We note that the analysis in the next section can be generalized to allow for time-varying gains \(a_i,b_i,c_i:[0,\infty ) \rightarrow {\mathcal D}\), where \({\mathcal D}\subset {\mathbb R}\) is bounded. For clarity of the presentation, we focus on the case where \(a_i,b_i,c_i > 0\) are constant but emphasize that this is not required.
Next, note that selecting \(k_i\) close to the upper limit \(\kappa _i / \bar{\rho }_i\) tends to make the desired velocity (7) more responsive to the formation term \(\rho (\xi _i)\), which, in turn, tends to make the agents converge more quickly to the desired interagent positions. The upper limit \(\kappa _i / \bar{\rho }_i\) on \(k_i\) is imposed to guarantee that the desired speed \(s_{\textrm{d,i}}\) is in the admissible range \({\mathcal S}_{\textrm{d,i}}\). The upper limit on \(k_i\) is determined by the choice of \(\mu _i\), the leader’s velocity \(\dot{q}_\textrm{g}\), and the rate of change of the formation \(\dot{\chi }_i\).
The formation gains \(\beta _i\) and \(\beta _{ij}\) determine how sensitive \(p_{\textrm{d,i}}\) is to errors in the ith agent’s position relative to the leader and the ith agent’s position relative to the jth agent, respectively.
Finally, we note that the control (5)–(15) relies on the leader’s acceleration \(\ddot{q}_\textrm{g}\) to calculate the desired acceleration \(\dot{p}_{\textrm{d,i}}\). For many practical applications, \(\ddot{q}_\textrm{g}\) is relatively small. In this case, simulations and experiments indicate that the control algorithm can be effectively implemented with \(\ddot{q}_\textrm{g}=0\). Nevertheless, the experimental flight results reported in this paper compute the control (5)–(15) using an estimate of \(\ddot{q}_\textrm{g}\) obtained from a process described in Sect. 10.
6 Stability analysis
In this section, we analyze the closed-loop dynamics (1)–(15). Define the position error, speed error, and pointing direction error
and define
which is the set of all orientations except those where the angle from \(R v_i\) to \(p_{\textrm{d,i}}(0)\) is exactly \(\pi \) rad.
The next theorem is the main theoretical result of this paper. The result shows that for almost all initial conditions \(( q_i(0),s_i(0), R_i(0) ) \in {\mathbb R}^3 \times {\mathcal S}_i \times \textrm{SO}(3)\), the error state \(({\tilde{q}}_i, {\tilde{s}}_i,{\tilde{y}}_i)\) converges to zero exponentially and (O1)–(O3) are satisfied. In fact, the error state converges to zero for all initial conditions except those where the angle from \(\dot{q}_i(0)\) to \(p_{\textrm{d,i}}(0)\) is exactly \(\pi \) rad. The proof of the following theorem is in Appendix A.
Theorem 1
Assume that \(A+B\) is positive definite. Then, the following statements hold:
-
i)
\(\big ( {\tilde{q}}_1(t),\ldots , {\tilde{q}}_n(t), {\tilde{s}}_1(t),\ldots ,{\tilde{s}}_n(t),{\tilde{y}}_1(t), \ldots , {\tilde{y}}_n(t) \big ) \equiv 0\) is a Lyapunov stable equilibrium of (1)–(15).
-
ii)
For all initial conditions \(\big (q_i(0), s_i(0), R_i(0) \big ) \in {\mathbb R}^3 \times [0,\infty ) \times {\mathcal R}_i\), \({\tilde{q}}_i\), \({\tilde{s}}_i\), and \({\tilde{y}}_i\) converge to zero exponentially.
-
iii)
For all initial conditions \(\big (q_i(0), s_i(0), R_i(0) \big ) \in {\mathbb R}^3 \times [0,\infty ) \times {\mathcal R}_i\), (O1) and (O2) are satisfied.
-
iv)
If \(s_i(0) \in {\mathcal S}_i\), then (O3) is satisfied.
-
v)
If \(s_i(0) \not \in {\mathcal S}_i\), then there exists \(T > 0\) such that for all \(t\in [0,T]\), \(s_i(t) \not \in {\mathcal S}_i\) and for all \(t>T\), \(s_i(t) \in {\mathcal S}_i\).
7 Hardware platform
This section describes the experimental fixed-wing UAV platform used in the experiments presented in this paper. The UAVs are Skywalker X8 flying wing foam airframes (see Fig. 3), which consist of 2 wings attached to a fuselage section and reinforced with carbon fiber wing spars. These UAVs are launched with a bungee-based catapult-assist system (see Fig. 4) and skid landed. We note that the formation control implementation presented in the next section can be used with a wide range of fixed-wing aircraft. The UAV is equipped with a Pixhawk flight controller with the ArduPilot firmware, which provides inner-loop control, waypoint navigation, state estimation, and interfaces with a global positioning system (GPS) receiver. An on-board Raspberry Pi obtains state estimates from the Pixhawk, communicates with other UAVs using WiFi, and executes the formation control (5)–(15). A propeller and brushless motor are mounted to the aft end of the fuselage. The motor is controlled by an electronic speed controller (ESC), which is mounted inside the fuselage and receives power from the battery through the Pixhawk power module. The ESC is connected to the Pixhawk using a standard 3-pin servo connector.

Skywalker X8 airframe

UAV during catapult-assisted launch
The Pixhawk uses an extended Kalman filter to estimate the UAV’s position, velocity, and attitude using measurements from a 9-DoF inertial measurement unit (IMU), barometer, GPS, and airspeed sensor. These estimates are transmitted to the onboard Raspberry Pi through a universal serial bus connection. These estimates are also used for inner-loop control and waypoint-based navigation. Figure 5 shows the electronics mounted in the fuselage. The UAV is also equipped with a scientific payload for collecting meteorological measurement, which is described in Witte et al. (2017), Bailey et al. (2020) but was not active during the experiments in this article.

Top view of inside the UAV fuselage showing control electronics
Let \(\psi _i\), \(\theta _i\), \(\phi _i\) denote the yaw, pitch, and roll of the ith UAV using a 3-2-1 Euler sequence. Similarly, let \(\psi _\textrm{g}\), \(\theta _\textrm{g}\), \(\phi _\textrm{g}\) denote the yaw, pitch, and roll of the leader UAV using a 3-2-1 Euler sequence. These attitude measurements are obtained from the onboard IMUs.
To implement the formation control (5)–(15), the Pixhawk on each UAV is set to fly-by-wire-A mode. In this mode, the Pixhawk accepts a commanded pitch angle \(\theta _{\textrm{d,i}}\), commanded roll angle \(\phi _{\textrm{d,i}}\), and commanded throttle \(T_i\). If flown by a human pilot, then the Pixhawk receives these commands from the RC transmitter operated by the pilot. For this autonomous formation-control implementation, the onboard Raspberry Pi provides these commands to the Pixhawk using the MAVLink messaging protocol.
At startup, a secure ad-hoc WiFi network is created, allowing communication between the UAVs. The Raspberry Pi generates MAVLink commands using the DroneKit Python application programming interface and stores the state estimates and associated timestamps in Python class instances, which are broadcast over the ad-hoc WiFi network using the user datagram protocol at approximately 10 Hz.

The Python implementation has 4 processes: (1) broadcast UAV state information to the network (i.e., to the other UAVs); (2) receive information from the other UAVs on the network; (3) log information about all agents; and (4) check failsafe conditions, execute the control, and manage the startup and shutdown of the other processes. Communication between processes is achieved using Python thread-safe queues.
8 Formation control implementation
This section presents a multi-loop implementation of the formation-control algorithm (5)–(15) for the fixed-wing UAVs described in Sect. 7. The key aspects of the implementation include: middle-loop controllers, computing the time-varying formation (i.e., \(\chi _i\), \(\dot{\chi }_i\), \(\ddot{\chi }_i\)), and accounting for asynchronous feedback. The frame \(\hbox {F}_i\) is selected such that \(v_i = e_1 = [ 1 \quad 0 \quad 0 ]^\textrm{T}\).
8.1 Middle-loop controllers
The control inputs for the UAV described in Sect. 7 are \(\theta _{\textrm{d,i}}\), \(\phi _{\textrm{d,i}}\), and \(T_i\). In contrast, the formation algorithm (5)–(15) provides controls \(u_i\) and \(\omega _i\). Thus, we implement middle-loop controllers such that closed-loop UAV dynamics approximate the dynamics (1)–(3). These middle-loop controllers map \(u_i\) and \(\omega _i\) determined from the formation control (5)–(15) to \(\theta _{\textrm{d,i}}\), \(\phi _{\textrm{d,i}}\), and \(T_i\), which are the control inputs for the UAV. This multi-loop implementation is shown in Fig. 6.
Define the heading angle and flight-path angle
Similarly, define the desired heading angle and desired flight-path angle
We now present middle-loop controllers that determine \(\theta _{\textrm{d,i}}\), \(\phi _{\textrm{d,i}}\), and \(T_i\). The pitch command \(\theta _{\textrm{d,i}}\) is given by
where \(k_{\gamma _i,\textrm{p}}, k_{\gamma _i,\textrm{i}}, k_{\gamma _i,\textrm{d}} > 0\) are the proportional, integral, and derivative (PID) gains. The desired-flight-path-angle rate is approximated as \(\dot{\gamma }_{\textrm{d,i}} \approx e^\textrm{T}_2 \omega _i\), which follows from the 3-2-1 Euler angle kinematics where the final Euler rotation is small.
The roll command \(\phi _{\textrm{d,i}}\) is given by
where where \(k_{\sigma _i,\textrm{p}}, k_{\sigma _i,\textrm{i}}, k_{\sigma _i,\textrm{d}} > 0\) are the PID gains, and \(g = 9.81~\textrm{m}/\textrm{s}^2\) is the acceleration due to gravity. The first term in (20) is the roll angle that yields the desired heading rate \(\dot{\sigma }_{\textrm{d,i}}\) with speed \(s_i\) under the assumption of a coordinated turn (Beard et al., 2014). The desired-heading-angle rate is approximated as \(\dot{\sigma }_{\textrm{d,i}} \approx e^\textrm{T}_3 \omega _i/ \cos \gamma _i\), which follows from the 3-2-1 Euler angle kinematics where the final Euler rotation is small.
The throttle command \(T_i\) is given by
where \(s_{\textrm{a,i}}(t) \in {\mathbb R}\) is the measured airspeed; \(\eta _{0}>0\) is the autopilot’s trim-throttle parameter; \(\eta _{\phi }>0\) is the autopilot’s trim-roll parameter; \(s_{\mathrm{a_0}}>0\) is the autopilot’s trim-airspeed parameter; \(\eta _{s}>0\) is a feedback gain; and \(k_{s_i,\textrm{p}}, k_{s_i,\textrm{i}} >0\) are PI gains. The second term in (21) is an estimate of the throttle required to counteract increased drag in a turn.
The commands \(\theta _{\textrm{d,i}}\), \(\phi _{\textrm{d,i}}\), and \(T_i\) are computed using (19)–(21). Then, each command is saturated if it lies outside of the autopilot’s acceptable ranges, which, for the Pixhawk, are \([-\pi /9,\pi /9]\) rad for \(\theta _{\textrm{d,i}}\), \([-5\pi /18,5\pi /18]\) rad for \(\phi _{\textrm{d,i}}\), and [0, 100] for \(T_i\). In addition, we implement a standard anti-windup approach to prevent the integral terms in (19)–(21) from increasing in magnitude if the associated command signal is saturated.
8.2 Computing \(\chi _i\), \( \dot{\chi }_i\), and \(\ddot{\chi }_i\)
For all simulations and experiments in this paper, we use the leader-frame specialization of this algorithm described in Sect. 4. Specifically, we consider the time-varying desired positions \(\chi _i(t) = R_\textrm{g}(t) \upsilon _i\), where \(R_\textrm{g}:[0,\infty ) \rightarrow \text{ SO }(3)\) is the rotation matrix from \(\textrm{F}_\textrm{g}\) to \(\textrm{E}\), and \(\upsilon _i \in {\mathbb R}^3\) is the desired position of \(o_i\) relative to \(o_\textrm{g}\) resolved in \(\textrm{F}_\textrm{g}\). Thus, the desired relative positions are constant in the leader-fixed frame \(\textrm{F}_\textrm{g}\).
Define the leader’s heading angle and flight-path angle
and the associated rotation matrix
Next, note that \(R_\textrm{g}\) satisfies
where it follows from the 3-2-1 Euler angle kinematics that
The time-varying desired positions are given by
and it follows from (25) and (27) that
Since the leader’s sensor package (i.e., GPS, IMU, and airspeed sensor) provides a measurement of \(\dot{q}_\textrm{g}\), we compute \(R_\textrm{g}\) directly from (22)–(24). Then, \(\chi _i\) is computed from (27). In order to compute \(\dot{\chi }_i\) and \(\ddot{\chi }_i\) from (28) and (29), we require an estimate of \(\omega _\textrm{g}\) and \(\dot{\omega }_\textrm{g}\), which are not directly measured. However, the leader’s IMU provides measurements of the yaw rate \(\dot{\psi }_\textrm{g}\), pitch rate \(\dot{\theta }_\textrm{g}\), and roll rate \(\dot{\phi }_\textrm{g}\). Thus, we estimate \(\omega _\textrm{g}\) using (26) with \(\dot{\sigma }_\textrm{g}= \dot{\psi }_\textrm{g}\) and \(\dot{\gamma }_\textrm{g}= \dot{\theta }_\textrm{g}\). Then, we compute \(\dot{\chi }_i\) and \(\ddot{\chi }_i\) from (28) and (29) using this estimate of \(\omega _\textrm{g}\) and the assumption that \(\dot{\omega }_\textrm{g}\) is negligible. Note that we performed software-in-the-loop (SITL) simulations and preliminary flight experiments both neglecting \(\dot{\omega }_\textrm{g}\) and using a numerical approximation of \(\dot{\omega }_\textrm{g}\). The SITL simulations and flight experiments perform better by neglecting \(\dot{\omega }_\textrm{g}\).
8.3 State measurement correction
Due to the software architecture imposed by DroneKit and ArduPlane, the state feedback measurements on each UAV are not synchronized with sampling of the control loop. Furthermore, the control loops of the agents are not synchronized with one another. To mitigate this, the timestamp of each measurement is recorded alongside the measurement. Before a measurement is used, it is corrected using first-order Euler integration.
Each agent corrects its own state measurement before broadcasting it, and each receiving agent corrects that measurement again using the time at which the message was received and the time at which its control loop is sampled. Network latency is not accounted for in this method.
9 Software-in-the-loop simulation results
This section presents results of software-in-the-loop (SITL) simulations using the formation control (5)–(15) with the multi-loop implementation described in Sect. 8. For these simulations, one instance of the Python implementation is executed for each UAV, and each instance communicates with a corresponding instance of the Arduplane firmware running in SITL mode. These firmware instances also simulate the dynamics of an aircraft based on a commercial off-the-shelf remote-controlled aircraft (specifically, the Rascal110). Formation control instances communicate with one another over the local network. All software runs on a single Ubuntu machine. In this way, the control algorithms and implementation are tested with a high-fidelity UAV model.
For all simulations, \(n=3\) UAVs. The speed dynamics are (2), where \(f_i = -0.64 s_i\) and \(g_i =0.64\), which implies that the speed dynamics are low pass with unity gain at DC, where the time constant 0.64 is estimated from the closed-loop step response of the UAV with the middle-loop speed control. The speed bounds are \(\underline{s}_i= 16\) m/s and \({\bar{s}}_i= 30\) m/s, and the barrier function is given by Example 5 with \(\nu = 1/20\). The scalar control function \(\mu _i\) is given by Example 1 with \(\nu _1 = 50\), \(\nu _2 =1\), and \(m=0.5\). Let \(k_i=3\), \(a_i=1\), \(b_i=0.1\) and \(c_i=0.1\). The desired relative positions are \(\upsilon _1 = [-5 \quad 5 \quad 0 ] ^\textrm{T}\) m, \(\upsilon _2 = [ -5 \quad -5 \quad -4 ]^\textrm{T}\) m, and \(\upsilon _3 = [ -5 \quad -5 \quad 4 ]^\textrm{T}\) m. The formation and middle-loop controls are implemented at 25 Hz.

Simulation 1: Trajectories of leader and agents in the horizontal plane with time as the vertical axis

Simulation 1: Agent position relative to the leader \(q_i-q_\textrm{g}\) and \(\Vert {\tilde{q}}_i\Vert \). The desired relative position \(\chi _i\) is shown with a dashed line
In all simulations, a leader UAV flies rectangular trajectories and circular trajectories. First, the leader flies a sequence of 4 waypoints arranged in a rectangle. Next, the leader flies a sequence of 4 waypoints arranged in a rectangle, where the northeast and southwest waypoints are 50 m above the others. Each of these sequences are repeated twice. Finally, the leader executes a circular trajectory with radius 120 m and changes altitude several times. Note that Assumption 1 is satisfied for all agents with \(\kappa _i = 3.6\) m/s.
To describe the communication structure used in the SITL simulations, define the neighbor set
We examine 3 different communication structures: (1) an undirected line (\({\mathcal N}_1 = \{ 2\}\), \({\mathcal N}_2 = \{1,3\}\), \({\mathcal N}_3 = \{2\}\)) where only agent 1 has feedback of the leader; (2) a directed line (\({\mathcal N}_1 = \emptyset \), \({\mathcal N}_2 = \{1\}\), \({\mathcal N}_3 = \{2\}\)) where only agent 1 has feedback of the leader; and (3) a directed line (\({\mathcal N}_1 = \emptyset \), \({\mathcal N}_2 = \{1\}\), \({\mathcal N}_3 = \{2\}\)) where all agents have feedback of the leader. We now present results from each SITL simulation—one for each communication structure.
Simulation 1
Let \({\mathcal N}_1 = \{ 2\}\), \({\mathcal N}_2 = \{1,3\}\), \({\mathcal N}_3 = \{2\}\), \(\beta _1=1\), and \(\beta _2 = \beta _3=0\), which implies that only agent 1 has position feedback of the leader. For all \(i\in \{1,2,3\}\) and all \(j \in {\mathcal N}_i\), let \(\beta _{ij}= 1\). Figure 7 shows the UAV trajectories in the horizontal plane, where the vertical axis is time. Figure 8 shows each agent’s position relative to the leader as well as the desired relative position \(\chi _i\) in each direction. The figure also shows \(\Vert {\tilde{q}}_i\Vert \) versus time. Figure 9 shows the actual and desired speed, flight-path angle, and heading angle of each agent. \(\triangle \)

Simulation 1: Actual (solid) and desired (dashed) speed \(s_i\), flight-path angle \(\gamma _i\), and heading \(\sigma _i\). The upper and lower speed bounds are indicated by thin black lines

Simulation 2: Agent position relative to the leader \(q_i-q_\textrm{g}\) and \(\Vert {\tilde{q}}_i\Vert \). The desired relative position \(\chi _i\) is shown with a dashed line

Simulation 2: Actual (solid) and desired (dashed) speed \(s_i\), flight-path angle \(\gamma _i\), and heading \(\sigma _i\). The upper and lower speed bounds are indicated by thin black lines

Simulation 3: Agent position relative to the leader \(q_i-q_\textrm{g}\) and \(\Vert {\tilde{q}}_i\Vert \). The desired relative position \(\chi _i\) is shown with a dashed line

Simulation 3: Actual (solid) and desired (dashed) speed \(s_i\), flight-path angle \(\gamma _i\), and heading \(\sigma _i\). The upper and lower speed bounds are indicated by thin black lines
Simulation 2
This simulation is the same as Simulation 1 except that \({\mathcal N}_1 = \emptyset \), \({\mathcal N}_2 = \{1\}\), \({\mathcal N}_3 = \{2\}\), which implies that the interagent communication is a directed (rather than undirected) line. Simulation Figs. 10 and 11 provide plots similar to those described in Simulation 1. \(\triangle \)
Simulation 3
This simulation is the same as Simulation 2 except that \(\beta _1=\beta _2 = \beta _3=1\), which implies that all agents have position feedback of the leader. Figures 12 and 13 provide plots similar to those described in Simulation 1. \(\triangle \)
To evaluate performance, we use the root mean square (RMS) of the position error \({\tilde{q}}_i\) for the rectangular and circular portions of the trajectory, which are given by
where \([t_{\textrm{r,0}},t_{\mathrm{r,\textrm{f}}}]\) and \([t_{\textrm{c,0}},t_{\mathrm{c,\textrm{f}}}]\) correspond to the intervals of the rectangular and circular portions, respectively. For all simulations, \(t_{\textrm{r,0}} = 95~\textrm{s}\), \(t_{\mathrm{r,\textrm{f}}} = 550~\textrm{s}\), \(t_{\textrm{c,0}} = 650~\textrm{s}\), and \(t_{\mathrm{c,\textrm{f}}} = 1080~\textrm{s}\). The RMS position errors for each UAV and the RMS position errors averaged over the n UAVs are in Table 1 for each SITL simulation. This table also provides the mean RMS of the percent error, that is, the RMS of \(\Vert {\tilde{q}}_i\Vert / \Vert \chi _i \Vert \) averaged over the n UAVs.
In Simulations 1 and 2, UAV 1’s RMS position error is smaller than that of UAV 2, which is smaller than that of UAV 3 as shown in Table 1. UAV 1’s RMS position error is smallest because it has direct feedback of the leader’s position, whereas the other UAVs do not. Furthermore, UAV 2’s RMS position error is smaller than that of UAV 3 because UAV 2 is a walk of length one (in the graph \({\mathcal G}\)) from UAV 1, which has access to the leader’s position, whereas UAV 3 is a walk of length 2 from UAV 1. The directed communication (Simulation 2) results in smaller RMS position errors than the undirected communication (Simulation 1). This observation is most likely a result of UAV 1 and UAV 2 using feedback from fewer UAVs for the directed case. Notably, UAV 1 only uses feedback from the leader and UAV 2 only uses feedback from UAV 1. The RMS position error is smallest for Simulation 3 because each UAV has direct feedback of the leader’s position. These simulations suggest that it is desirable for each UAV to be closely connected (i.e., a short walk in the graph \({\mathcal G}\)) to a UAV that has a measurement of the leader’s position.
10 Experimental results
This section describes the results of flight experiments using the formation control (5)–(15) with the multi-loop implementation described in Sect. 8. These experiments were conducted at the Lexington Model Airplane Club in Lexington, Kentucky, USA. Each UAV is launched from a bungee launcher and uses the Pixhawk’s built-in automatic takeoff functionality. After all UAVs have been launched, each UAV (except the leader) is switched to fly-by-wire-A mode and formation-control is engaged using a switch on the radio-control transmitter for the corresponding UAV.
The speed dynamics are (2), where \(f_i = -0.4 s_i\) and \(g_i =0.4\), which implies that the speed dynamics are low pass with unity gain at DC, where the time constant 0.4 is estimated from the closed-loop step response of the UAV with the middle-loop speed control. The barrier function is implemented as \(h_i=1\), which implies that the barrier function does not enforce speed bounds. However, the desired speed \(s_{\textrm{d,i}}\) is saturated if it lies outside the interval [18, 30] m/s. To avoid stall, the commanded airspeed \(u_i + s_{\textrm{a,i}} - s_i\) is saturated if it lies outside the interval [18, 30] m/s. The scalar control function \(\mu _i\) is given by Example 1 with \(\nu _1 = 2.5\times 10^5\), \(\nu _2 = 1\), and \(m=0.5\). Let \(a_i = 1\), \(b_i = 0\), and \(c_i(t) = 0.0003 s_{\textrm{d,i}}^2(t)\). In these experiments, the gains \(\beta _i\) and \(\beta _{ij}\) are implemented as diagonal matrices rather than scalars. This generalization to (6) allows for different gains to be used in each inertial direction. In these experiments, the gain in the vertical direction is less than that in the horizontal plane in order to limit oscillations in \(\gamma _i\) while yielding small position errors in the horizontal plane. The values for \(\beta _i\) and \(\beta _{ij}\) are provided in each experiment. The formation and middle-loop controls are implemented at 10 Hz.
The leader’s acceleration \(\ddot{q}_\textrm{g}\) is estimated by assuming that \(q_\textrm{g}\) satisfies (1)–(3) with the subscripts i replaced by \(\textrm{g}\), and where \(v_\textrm{g}= e_1\) and \(s_\textrm{g}\triangleq \Vert \dot{q}_\textrm{g}\Vert \). Thus, differentiating (1) yields \(\ddot{q}_\textrm{g}= s_\textrm{g}\dot{R}_\textrm{g}e_1 + \dot{s}_\textrm{g}R_\textrm{g}e_1\). We estimate \(\dot{s}_\textrm{g}\) using numerical differentiation with a low-pass filter. We compute \(\dot{R}_\textrm{g}\) using (25), where \(\omega _\textrm{g}\) is computed from (26) using estimates of \(\dot{\gamma }_\textrm{g}\) and \(\dot{\sigma }_\textrm{g}\). Specifically, \(\dot{\gamma }_\textrm{g}\) is estimated using numerical differentiation with a low-pass filter, and \(\dot{\sigma }_\textrm{g}\) is estimated as \(\dot{\sigma }_\textrm{g}\approx \tfrac{g \tan \phi _\textrm{g}}{ s_\textrm{g}\cos \theta _\textrm{g}}\), which is the relationship for a coordinated turn (Beard et al., 2014).
Experiment 1
During this experiment, the wind was approximately 4 m/s from the northwest, and the ambient temperature was approximately 20\(^\textrm{o}\) C. This experiment has a leader UAV and \(n=1\) additional UAV. The desired relative position is \(\upsilon _1 = [ -10 \quad -10 \quad 20 ]^\textrm{T}\) m, and \(\beta _i = {{\,\textrm{diag}\,}}(150,150,45) \). First, the leader UAV flies in a circle with a 120 m radius for approximately 260 s. Next, the leader UAV flies a rectangular flight path based on several waypoints. Figure 14 shows the UAV trajectories in the horizontal plane, where the vertical axis is time. By \(t = 20\) s, the UAV has achieved the desired formation relative to the leader and stays in formation for the remainder of the experiment. Figure 15 shows the first circle in the trajectory from an overhead view, and Fig. 16 shows the transition from circles to rectangles from an overhead view. Figure 17 shows the agent’s position relative to the leader as well as the desired relative position \(\chi _i\) in each direction. Figure 18 shows the actual and desired speed, flight-path angle, and heading angles of the agent. For this experiment, the RMS errors are \({\mathcal P}_{\textrm{c,1}} = 7.7\) m, and \({\mathcal P}_{\textrm{r,1}} = 8.2\) m, where \(t_{\textrm{c,0}} = 40~\textrm{s}\) \(t_{\mathrm{c,\textrm{f}}}=250~\textrm{s}\), \(t_{\textrm{r,0}}=270~\textrm{s}\), and \(t_{\textrm{r,f}} = 960~\textrm{s}\). \(\triangle \)

Experiment 1: Trajectories of leader and agent in the horizontal plane with time as the vertical axis. The axes \(e_1^\textrm{T}q_i\) and \(e_2^\textrm{T}q_i\) are the position of the ith aircraft to the north and east of a fixed GPS reference location, which is the origin of the inertial frame \(\textrm{E}\)

Experiment 1: Abbreviated trajectories of the leader and agent in the horizontal plane. The leader follows a circular trajectory and the agent converges to the desired relative position. The axes \(e_1^\textrm{T}q_i\) and \(e_2^\textrm{T}q_i\) are the position of the ith aircraft to the north and east of a fixed GPS reference location

Experiment 1: Abbreviated trajectories of the leader and agent in the horizontal plane as the leader transitions from the circular to rectangular trajectory. The agent remains in formation. The axes \(e_1^\textrm{T}q_i\) and \(e_2^\textrm{T}q_i\) are the position of the ith aircraft to the north and east of a fixed GPS reference location

Experiment 1: Agent position relative to the leader \(q_1-q_\textrm{g}\) and \(\Vert {\tilde{q}}_1\Vert \). The desired relative position \(\chi _i\) is shown with a dashed line

Experiment 1: Actual (solid) and desired (dashed) speed \(s_i\), flight-path angle \(\gamma _i\), and heading \(\sigma _i\)

Experiment 2: Trajectories of leader and agents in the horizontal plane with time as the vertical axis. The axes \(e_1^\textrm{T}q_i\) and \(e_2^\textrm{T}q_i\) are the position of the ith aircraft to the north and east of a fixed GPS reference location
Experiment 2
During this experiment, the wind was approximately 2 m/s from the southwest, and the ambient temperature was approximately 32\(^\textrm{o}\) C. This experiment has a leader UAV and \(n=2\) additional UAVs. The desired relative positions are \(\upsilon _1 = [ -10 \quad 10 \quad 20 ]^\textrm{T}\) m and \(\upsilon _2 = [ -10 \quad -10 \quad -20 ]^\textrm{T}\) m, and \(\beta _1 = \beta _2 = {{\,\textrm{diag}\,}}(105,105,31.5)\) and \(\beta _{12} = \beta _{21} = {{\,\textrm{diag}\,}}(50,50,15)\). The leader UAV flies a rectangular flight path based on several waypoints. Figure 19 shows the UAV trajectories in the horizontal plane, where the vertical axis is time. By \(t = 40\) s, the UAVs have achieved the desired formation and stay in formation for the remainder of the experiment. Figure 20 shows the first rectangle in the trajectory from an overhead view. Figure 21 shows each agent’s position relative to the leader as well as the desired relative position \(\chi _i\) in each direction. Figure 22 shows the actual and desired speed, flight-path angle, and heading angles of each agent. For this experiment, the RMS errors are \({\mathcal P}_{\textrm{r,1}} = 8.6\) m, and \({\mathcal P}_{\textrm{r,2}} = 8.8\) m, where \(t_{\textrm{r,0}}=45~\textrm{s}\) and \(t_{\textrm{r,f}} = 680~\textrm{s}\). \(\triangle \)

Experiment 2: Abbreviated trajectories of the leader and agents in the horizontal plane. The leader follows a rectangular trajectory and the agents converge to the desired relative positions. The axes \(e_1^\textrm{T}q_i\) and \(e_2^\textrm{T}q_i\) are the position of the ith aircraft to the north and east of a fixed GPS reference location
Experiment 3
During this experiment, the wind was approximately 2 m/s from the southwest, and the ambient temperature was approximately 32\(^\textrm{o}\) C. This experiment has a leader UAV and \(n=2\) additional UAVs. This experiment is similar to Experiment 2, but the formation control is only used to control the UAV formation in the horizontal plane (i.e., in 2 dimensions). In this case, the roll command \(\phi _{\textrm{d,i}}\) and throttle command \(T_i\) are determined from the middle-loop controls (20) and (21). However, the pitch command \(\theta _{\textrm{d,i}}\) is determined from a PID control designed to have \(e_3^\textrm{T}q_i\) track a constant altitude command. These commands are \(-80\) m and \(-120\) m for UAV 1 and UAV 2, respectively. Note that the inertial frame is north-east-down, which implies that negative values in the \(e_3\) direction correspond to positive altitude. For the formation control in the horizontal plane, the desired relative positions are \(\upsilon _1 = [ -10 \quad -10 ]^\textrm{T}\) m and \(\upsilon _2 = [ -10 \quad 10 ]^\textrm{T}\) m, and \(\beta _1 = \beta _2 = 105\) and \(\beta _{12} = \beta _{21} =50\). Note that the desired relative positions and gains in the horizontal plan are the same as those in Experiment 2. The leader UAV flies a rectangular flight path based on several waypoints. Figure 23 shows the UAV trajectories in the horizontal plane, where the vertical axis is time. By \(t = 40\) s, the UAVs have achieved the desired formation and stay in formation for the remainder of the experiment. Figure 24 shows each agent’s position relative to the leader and \(\chi _i\) in each direction in the horizontal plane. This figure also show the agent’s altitude and the desired altitude. Figure 25 shows the actual and desired speed, flight-path angle, and heading angles of each agent. For this experiment, the RMS errors are \({\mathcal P}_{\textrm{r,1}} = 6.7\) m, and \({\mathcal P}_{\textrm{r,2}} = 8.1\) m, where \(t_{\textrm{r,0}}=45~\textrm{s}\) and \(t_{\textrm{r,f}} = 570~\textrm{s}\) Note that \({\mathcal P}_{\textrm{r,i}}\) is computed based on the position error in all 3 directions; thus, the results can be compared with those of Experiments 1 and 2. \(\triangle \)

Experiment 2: Agent position relative to the leader \(q_i-q_\textrm{g}\) and \(\Vert {\tilde{q}}_i\Vert \). The desired relative position \(\chi _i\) is shown with a dashed line

Experiment 2: Actual (solid) and desired (dashed) speed \(s_i\), flight-path angle \(\gamma _i\), and heading \(\sigma _i\)
The RMS position errors for each UAV and the RMS position errors averaged over the n UAVs are in Table 2 for each experiment. The RMS position errors for Experiments 1 and 2 are similar, which demonstrates that adding the additional UAV does not substantially degrade the performance. The RMS position errors in Experiment 3 is improved relative to Experiment 2, which demonstrates that using formation control only in the horizontal plane (i.e., 2 dimensions) and a separate altitude control can improve performance.
Table 2 also provides the mean RMS of the percent error, that is, the RMS of \(\Vert {\tilde{q}}_i\Vert / \Vert \chi _i \Vert \) averaged over the n UAVs. Since Experiment 3 uses formation control only in the horizontal plane and there is no desired relative position \(\chi _i\) in the vertical direction, it is not possible to compute a mean RMS of the percent error that is commensurable to those in the other experiments and the SITL simulations. Thus, this metric is not reported in Table 2 for Experiment 3.
The mean RMS of the position errors for the experiments are approximately 6 times larger than those for the rectangular position of the SITL simulation with the comparable communication structure (i.e., Simulation 3). We attribute this to several factors. First, the desired relative positions \(\upsilon _i\) in the experiments have larger magnitude than those in the SITL simulations. Large \(\Vert \upsilon _i\Vert \) was used in the experiments for safety, specifically, to limit the chance of collisions between UAVs. However, since \(\upsilon _i\) is the desired relative position resolved in the leader’s velocity frame \(\textrm{F}_\textrm{g}\), it follows that larger \(\Vert \upsilon _i\Vert \) results in more aggressive desired trajectories for the UAVs (i.e., \(\Vert \chi _i \Vert \) are larger). This difference is reflected by the fact that although the mean RMS position error for the experiments is approximately 6 times larger than those for Simulation 3, the mean RMS of the percent error is only 2 times larger (34% and 35% for Experiments 1 and 2 compared to 18% for Simulation 3). Thus, the more aggressive desired trajectories is a significant driver in the larger RMS position errors for the experiments. Note that these more aggressive desired trajectories result most notably in more aggressive desired speed \(s_{\textrm{d,i}}\) as observed by comparing the desired speeds in SITL simulations (see Figs. 9, 11, and 13) to those in the experiments (see Figs. 18, 22 and 25). A second factor contributing to the difference between experiment and SITL simulation is that the UAV model (1)–(3) does not account for attitude dynamics; it only includes attitude kinematics. Furthermore, the unmodeled attitude dynamics may have a larger impact on the experimental results because the experimental UAV has slower attitude dynamics than the SITL UAV. Third, the speed dynamics for the experimental UAV are more uncertain than those of the SITL UAV. For example, the experimental UAV’s throttle response changes as the flight battery is depleted. This effect is not modeled in SITL. Fourth, the SITL simulations do not include time-varying wind, whereas the experiments do. Fifth, the multi-loop control is implemented at 25 Hz for SITL but only 10 Hz for the experiments (because of data-rate limitations in interagent communication and in the interface between the Pixhawk and Raspberry Pi). Sixth, since the experimental UAVs communicate over a wireless mesh network, packet loss occurs frequently in the experiments. This packet loss manifest as time delay in the feedback data. In contrast, packet loss does not occur in SITL.

Experiment 3: Trajectories of leader and agents in the horizontal plane with time as the vertical axis. The axes \(e_1^\textrm{T}q_i\) and \(e_2^\textrm{T}q_i\) are the position of the ith aircraft to the north and east of a fixed GPS reference location

Experiment 3: Agent position relative to the leader \(q_i-q_\textrm{g}\) and \(\Vert {\tilde{q}}_i\Vert \) in the horizontal plan, and the agent altitude. The desired relative position \(\chi _i\) and desired altitude are shown with dashed lines
References
Ali, Z., Israr, A., Alkhammash, E., et al. (2021). A leader-follower formation control of multi-UAVs via an adaptive hybrid controller. Complexity. https://doi.org/10.1155/2021/9231636
Bailey, S. C. C., Canter, C. A., Pampolini, L. F., et al. (2020). University of Kentucky measurements of wind, temperature, pressure and humidity in support of LAPSE-RATE using multi-site fixed-wing and rotorcraft UAS. Earth System Science Data, 12, 1759–1773. https://doi.org/10.5194/essd-12-1759-2020
Beard, R. W., Ferrin, J., & Humpherys, J. (2014). Fixed wing uav path following in wind with input constraints. IEEE Transactions on Control Systems Technology, 22(6), 2103–2117. https://doi.org/10.1109/TCST.2014.2303787
Beard, R. W., McLain, T. W., Nelson, D. B., et al. (2006). Decentralized cooperative aerial surveillance using decentralized cooperative aerial surveillance using fixed-wing miniature UAVs. Proceedings of IEEE, 94(7), 1306–1324. https://doi.org/10.1109/JPROC.2006.876930
Bonin, T., Chilson, P., Zielke, B., et al. (2013). Observations of the early evening boundary-layer transition using a small unmanned aerial system. Boundary-Layer Meteorology, 146, 119–132. https://doi.org/10.1007/s10546-012-9760-3
Bonin, T. A., Goines, D. C., Scott, A. K., et al. (2015). Measurements of the temperature structure-function parameters with a small unmanned aerial system compared with a sodar. Boundary-Layer Meteorology, 155(3), 417–434. https://doi.org/10.1007/s10546-015-0009-9
Cai, Z., Wang, L., Zhao, J., et al. (2020). Virtual target guidance-based distributed model predictive control for formation control of multiple UAVs. Chinese Journal of Aeronautics, 33(3), 1037–1056. https://doi.org/10.1016/j.cja.2019.07.016
Cao, Y., & Ren, W. (2012). Distributed coordinated tracking with reduced interaction via a variable structure approach. IEEE Transactions on Automatic Control, 57(1), 33–48. https://doi.org/10.1109/TAC.2011.2146830
Cao, Y., Yu, W., Ren, W., et al. (2013). An overview of recent progress in the study of distributed multi-agent coordination. IEEE Transactions Industrial Informatics, 9(1), 427–438. https://doi.org/10.1109/TII.2012.2219061
Chao, Z., Zhou, S. L., Ming, L., et al. (2012). UAV formation flight based on nonlinear model predictive control. Mathematical Problems in Engineering, 2012, 1–15. https://doi.org/10.1155/2012/261367
Chen, H., Wang, X., Shen, L., et al. (2021). Formation flight of fixed-wing UAV swarms: A group-based hierarchical approach. Chinese Journal of Aeronautics, 34(2), 504–515. https://doi.org/10.1016/j.cja.2020.03.006
Cordeiro, T. F. K., Ishihara, J. Y., & Ferreira, H. C. (2020). A decentralized low-chattering sliding mode formation flight controller for a swarm of UAVs. Sensors. https://doi.org/10.3390/s20113094
Darbari, V., Gupta, S., & Verma, O. P. (2017). Dynamic motion planning for aerial surveillance on a fixed-wing UAV. In Proceedings of International Conference Unmanned Aircrat Systems, Miami, FL, pp. 488–497, https://doi.org/10.1109/ICUAS.2017.7991463
de Marina, H. G., Sun, Z., & Bronz, M., et al. (2017) Circular formation control of fixed-wing UAVs with constant speeds. In Proceedings of the IEEE/RSJ international conference on intelligent robots and systems, Vancouver, Canada, pp. 5298–5303, https://doi.org/10.1109/IROS.2017.8206422
Guo, M., Zavlanos, M. M., & Dimarogonas, D. V. (2014). Controlling the relative agent motion in multi-agent formation stabilization. IEEE Transactions on Automatic Control, 59(3), 820–826. https://doi.org/10.1109/TAC.2013.2281480
Gu, Y., Seanor, B., Campa, G., et al. (2006). Design and flight testing evaluation of formation control laws. IEEE Transactions on Control Systems Technology, 14, 1105–1112. https://doi.org/10.1109/TCST.2006.880203
Heintz, C., & Hoagg, J. B. (2020b). Formation control for fixed-wing UAVs modeled with extended unicycle dynamics that include attitude kinematics on SO(3) and speed constraints. In Proceedings of the American Control Conference, Denver, CO, pp. 883–888, https://doi.org/10.23919/ACC45564.2020.9148001
Heintz, C., & Hoagg, J. B. (2020a). Formation control for agents modeled with extended unicycle dynamics that includes orientation kinematics on so(m) and speed constraints. Systems and Control Letters, 146(104), 784. https://doi.org/10.1016/j.sysconle.2020.104784
Hu, J., Sun, X., Liu, S., et al. (2019). Adaptive finite-time formation tracking control for multiple nonholonomic UAV system with uncertainties and quantized input. International Journal of Adaptive Control and Signal Processing, 33(1), 114–129. https://doi.org/10.1002/acs.2954
Kahagh, A. M., Pazooki, F., Haghighi, S. E., et al. (2022). Real-time formation control and obstacle avoidance algorithm for fixed-wing UAVs. The Aeronautical Journal. https://doi.org/10.1017/aer.2022.9
Lee, M., & Lee, D. (2021). A distributed two-layer framework for teleoperated platooning of fixed-wing UAVs via decomposition and backstepping. IEEE Robotics and Automation Letters, 6(2), 3655–3662. https://doi.org/10.1109/LRA.2021.3064207
Lee, K., & Singh, S. (2012). Variable-structure model reference adaptive formation control of spacecraft. Journal of Guidance, Control, and Dynamics, 35(1), 104–115. https://doi.org/10.2514/1.53904
Liang, Y., Dong, Q., & Zhao, Y. (2020). Adaptive leader-follower formation control for swarms of unmanned aerial vehicles with motion constraints and unknown disturbances. Chinese Journal of Aeronautics, 33(11), 2972–2988. https://doi.org/10.1016/j.cja.2020.03.020
Liao, F., Teo, R., Wang, J. L., et al. (2017). Distributed formation and reconfiguration control of VTOL UAVs. IEEE Transactions on Control Systems Technology, 25(1), 270–277. https://doi.org/10.1109/TCST.2016.2547952
Lippay, Z. S., & Hoagg, J. B. (2022). Formation control with time-varying formations, bounded controls, and collision avoidance. IEEE Transactions on Control Systems Technology, 30, 261–276. https://doi.org/10.1109/TCST.2021.3062824
Low, C. B. (2011). A dynamic virtual structure formation control for fixed-wing UAVs. In Proceedings under international conference on control, automation, Santiago, Chile, pp. 627–632, https://doi.org/10.1109/ICCA.2011.6137877
Mayer, S., Jonassen, M., Sandvik, A., et al. (2012). Atmospheric profiling with the UAS SUMO: A new perspective for the evaluation of fine-scale atmospheric models. Meteorology and Atmospheric Physics, 116(1–2), 15–26. https://doi.org/10.1007/s00703-010-0063-2
Mullen, J., Bailey, S. C. C., & Hoagg, J. B. (2016). Filtered dynamic inversion for altitude control of fixed wing unmanned aerial vehicles. Aerospace Science and Technology, 54, 241–252. https://doi.org/10.1016/j.ast.2016.04.013
Murray, R. M. (2007). Recent research in cooperative control of multivehicle systems. The Journal of Dynamic Systems, Measurement, and Control, 129(5), 571–583. https://doi.org/10.1115/1.2766721
Oh, K. K., Park, M. C., & Ahn, H. S. (2015). A survey of multi-agent formation control. Automatica, 53, 424–440. https://doi.org/10.1016/j.automatica.2014.10.022
Olfati-Saber, R. (2006). Flocking for multi-agent dynamic systems: Algorithms and theory. IEEE Transactions on Automatic Control, 51, 401–420. https://doi.org/10.1109/TAC.2005.864190
Olfati-Saber, R., Fax, J. A., & Murray, R. M. (2007). Consensus and cooperation in networked multi-agent systems. Proceedings of the IEEE, 95(1), 215–233. https://doi.org/10.1109/JPROC.2006.887293
Ota, J. (2006). Multi-agent robot systems as distributed autonomous systems. Advanced Engineering Informatics, 20(1), 59–70. https://doi.org/10.1016/j.aei.2005.06.002
Panagou, D., Stipanović, D. M., & Voulgaris, P. G. (2016). Distributed coordination control for multi-robot networks using Lyapunov-like barrier functions. IEEE Transactions on Automatic Control, 61(3), 617–632. https://doi.org/10.1109/TAC.2015.2444131
Panyakeow, P., & Meshahi, M. (2014). Deconflicted algorithms for a pair of constant speed unmanned aerial vehicles. IEEE Transactions on Aerospace and Electronic Systems, 50(1), 456–476. https://doi.org/10.1109/TAES.2013.110766
Park, C., Cho, N., Lee, K., et al. (2015). Formation flight of multiple UAVs via onboard sensor information sharing. Sensors, 15, 17398–17419. https://doi.org/10.3390/s150717397
Punzo, G., Karagiannakis, P., Bennet, D. J., et al. (2014). Enabling and exploiting self-similar central symmetry formations. IEEE Transactions on Aerospace and Electronic Systems, 50(1), 689–703. https://doi.org/10.1109/TAES.2013.120074
Qiu, H., & Duan, H. (2014). Receding horizon control for multiple uav formation flight based on modified brain storm optimization. Nonlinear Dynamics, 78(3), 1973–1988. https://doi.org/10.1007/s11071-014-1579-7
Qu, Z. (2009). Cooperative control of dynamical systems: applications to autonomous vehicles. Springer Science & Business Media. https://doi.org/10.1007/978-1-84882-325-9
Ren, W. (2008). On consensus algorithms for double-integrator dynamics. IEEE Transactions on Automatic Control, 53(6), 1503–1509. https://doi.org/10.1109/TAC.2008.924961
Ren, W., Beard, R. W., & Atkins, E. M. (2007). Information consensus in multivehicle cooperative control. IEEE Control Systems Magazine, 27(2), 71–82. https://doi.org/10.1109/MCS.2007.338264
Singh, S. N., Zhang, R., Chandler, P., et al. (2003). Decentralized nonlinear robust control of UAVs in close formation. International Journal of Robust and Nonlinear Control, 13(11), 1057–1078. https://doi.org/10.1002/rnc.754
Stipanović, D. M., Inalhan, G., Teo, R., et al. (2004). Decentralized overlapping control of a formation of unmanned aerial vehicles. Automatica, 40(8), 1285–1296. https://doi.org/10.1016/j.automatica.2004.02.017
Wainwright, C. E., Bonin, T. A., Chilson, P. B., et al. (2015). Methods for evaluating the temperature structure-function parameter using unmanned aerial systems and large-eddy simulation. Boundary-Layer Meteorology, 155(2), 189–208. https://doi.org/10.1007/s10546-014-0001-9
Wang, X., Shen, L., Liu, Z., et al. (2019). Coordinated flight control of miniature fixed-wing UAV swarms: Methods and experiments. SCIENCE CHINA Information Sciences, 62(11), 1–17. https://doi.org/10.1007/s11432-018-9887-5
Wang, J., & Xin, M. (2013). Integrated optimal formation control of multiple unmanned aerial vehicles. IEEE Transactions on Control Systems Technology, 21(5), 1731–1744. https://doi.org/10.1109/TCST.2012.2218815
Wang, X., Yu, Y., & Li, Z. (2021). Distributed sliding mode control for leader-follower formation flight of fixed-wing unmanned aerial vehicles subject to velocity constraints. International Journal of Robust and Nonlinear Control, 31(6), 2110–2125. https://doi.org/10.1002/rnc.5030
Wellman, B. J., & Hoagg, J. B. (2017). A flocking algorithm with individual agent destinations and without a centralized leader. Systems and Control Letters, 102, 57–67. https://doi.org/10.1016/j.sysconle.2017.01.006
Witte, B. M., Singler, R. F., & Bailey, S. C. C. (2017). Development of an unmanned aerial vehicle for the measurement of turbulence in the atmospheric boundary layer. Atmosphere, 8(195), 1–25.
Yang, X., & Fan, X. (2019). Robust formation control for uncertain multiagent systems with an unknown control direction and disturbances. IEEE Access, 7(99), 106439–106452. https://doi.org/10.1109/ACCESS.2019.2932234
Yan, J., Yu, Y., & Wang, X. (2022). Distance-based formation control for fixed-wing UAVs with input constraints: A low gain method. Drones, 6(7), 159. https://doi.org/10.3390/drones6070159
Yu, X., & Liu, L. (2016). Distributed formation control of nonholonomic vehicles subject to velocity constraints. IEEE Transactions on Industrial Electronics, 63(2), 1289–1298. https://doi.org/10.1109/TIE.2015.2504042
Zhang, M., & Liu, H. H. T. (2013). Formation flight of multiple fixed-wing unmanned aerial vehicles. In Proceedings of the American control conference, Washington, D.C., pp. 1614–1619, https://doi.org/10.1109/ACC.2013.6580066
Zhang, H., & Lewis, F. L. (2012). Adaptive cooperative tracking control of higher-order nonlinear systems with unknown dynamics. Automatica, 48(7), 1432–1439. https://doi.org/10.1016/j.automatica.2012.05.008
Zhang, B., Sun, X., Liu, S., et al. (2020). Adaptive model predictive control with extended state observer for multi-UAV formation flight. International Journal of Adaptive Control and Signal Processing, 34(10), 1341–1358. https://doi.org/10.1002/acs.3145
Zhao, W., Chu, H., Zhang, M., et al. (2019). Flocking control of fixed-wing UAVs with cooperative obstacle avoidance capability. IEEE Access, 7, 17798–17808. https://doi.org/10.1109/ACCESS.2019.2895643
Acknowledgements
This work is supported in part by the National Science Foundation (CNS-1932105, OIA-1539070) and the National Aeronautics and Space Administration (NNX15AR69H) through the NASA Kentucky Space Grant.
Author information
Authors and Affiliations
Contributions
CH and JBH developed the formation control algorithm and wrote the manuscript. CH conducted the software-in-the-loop simulations and flight experiments. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Ethical statement
The authors have no competing interests to declare that are relevant to the content of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A
Proof of Theorem 1
Proof
To examine the speed error \({\tilde{s}}_i\), consider the partial Lyapunov-like function \(Z_i:{\mathcal S}_i \times {\mathcal S}_{\textrm{d,i}} \rightarrow [0,\infty )\) defined by
and it follows that
Evaluating (A2) along (2) and (14) and using (17) implies that for all \(s_i \in {\mathcal S}_i\),
where

Experiment 3: Actual (solid) and desired (dashed) speed \(s_i\), flight-path angle \(\gamma _i\), and heading \(\sigma _i\)
To prove iv), note that \(s_{i}(0) \in {\mathcal S}_{i}\). Assume for contradiction that (O3) is not satisfied, which implies that there exists \(t_1 > 0\) such that for all \(t \in [0,t_1)\), \(s_i(t) \in {\mathcal S}_i\) and \(h(t_1) = 0\) (i.e., \(s_{i}(t_1) = {\bar{s}}_i\) or \(s_{i}(t_1) = \underline{s}_i\)). Since, in addition, \(s_{\textrm{d,i}}(t_1) \in {\mathcal S}_{\textrm{d,i}}\), it follows that \({\tilde{s}}_i(t_1) \ne 0\). Thus, (A1) yields that \(\lim _{t \rightarrow t_1} Z_i(s_i(t),s_{\textrm{d,i}}(t)) = + \infty \), which implies that there exists \(t_2 \in [0,t_1)\) such that \(Z_i(s_i(t_2),s_{\textrm{d,i}}(t_2)) > Z_i(s_i(0),s_{\textrm{d,i}}(0))\). Since for all \(t\in [0,t_2]\), \(s_i(t) \in {\mathcal S}_i\), it follows from (A3) that
which is a contradiction. Thus, (O3) is satisfied, which confirms iv).
To prove v), assume for contradiction that for all \(t\ge 0\), \(s_i(t) \not \in {\mathcal S}_i\). Then, it follows from (2) and (14) that for all \(t\ge 0\),
Since for all \(t\ge 0\), \(s_i(t) \not \in {\mathcal S}_i\) and \(s_{\textrm{d,i}}(t) \in {\mathcal S}_{\textrm{d,i}}\), it follows that \({\tilde{s}}_i(t)^2 > \varepsilon _i^2\), which combined with (A5) implies that for all \(t \ge 0\), \(\dot{h}_i(s_i(t)) > b_i \varepsilon _i^2\). Let \(t_3 = -h_i(s_i(0))/(b_i \varepsilon _i^2)\), and it follows that
Since \(h_i(s_i(t_3)) > 0\), it follows that \(s_i(t_3) \in {\mathcal S}_i\), which is a contradiction. Thus, there exists \(t_0 > 0\) such that \(s_i(t_0) \in {\mathcal S}_i\). Next, note that iv) implies that \({\mathcal S}_i\) is positively invariant. Thus, since \(s_i(0) \not \in {\mathcal S}_i\) and \(s_i(t_0) \in {\mathcal S}_i\), it follows that there exists \(T\in (0,t_0)\) such that for all \(t\in [0,T]\), \(s_i(t) \not \in {\mathcal S}_i\) and for all \(t > T\), \(s_i(t) \in {\mathcal S}_i\), which confirms v).
Next, define \({\mathcal B}\triangleq \{ {\tilde{y}} \in {\mathbb R}^3 :\Vert {\tilde{y}} \Vert \le 2 \}\), and consider the partial Lyapunov-like function \(Y:{\mathcal B}\rightarrow [0,2]\) defined by
and it follows that
Since \(y_i\) and \(y_{\textrm{d,i}}\) are unit vectors, it follows that \(y_i^\textrm{T}\dot{y}_i = 0\) and \(y_{\textrm{d,i}}^\textrm{T}\dot{y}_{\textrm{d,i}} = 0\). Thus, evaluating (A7) along the trajectories of (3) and (15) yields
Next, since \([R^\textrm{T}x]_\times = R^\textrm{T}[ x]_\times R\), and \([[x_1]_\times x_2]_\times = -x_1 x_2^\textrm{T}+ x_2 x_1^\textrm{T}\), it follows that
Note that
along the trajectories of (A6) and (A9) yields
which is nonpositive because the codomain of Y is [0, 2].
To examine the position error \({\tilde{q}}_i\), differentiating (16), and using (1),(4),(5), and (7) implies that
Since \(s_i y_i - p_{\textrm{d,i}} = {\tilde{s}}_i y_i + s_{\textrm{d,i}} {\tilde{y}}_i\), it follows that
Next, define
and it follows from (A13) that
where \(\otimes \) is the Kronecker product. Since \(A+B\) is nonsingular, it follows that (A14) can be viewed as a linear change of variables between \(\xi \) and \({\tilde{q}}\). Next, (A12) implies that
where
Thus, differentiating (A14) and using (A15) yields
where we omit the arguments of \(\Delta _1\) and \(\Delta _2\) for brevity. Since \(A+B\) is nonsingular, it follows from Qu (2009, Theorem 4.25) that there exists a positive-definite diagonal matrix \(D \in {\mathbb R}^{n \times n}\) such that \(R \triangleq (A+B)^\textrm{T}D + D (A+B)\) is positive definite. Let \(d_1,\ldots ,d_n > 0\) denote the diagonal elements of D, that is, \(D = {{\,\textrm{diag}\,}}(d_1, \dots , d_n)\). Consider the partial Lyapunov-like function \(X: {\mathbb R}^{3n} \rightarrow [0,\infty )\) defined by
where \(M_i\) is defined in (C1). Hence, (A20) implies that
Evaluating (A21) along (A19) yields
where \(Q \triangleq D(A+B) \otimes I_3\), \(\ell _0 \triangleq \lambda _{\textrm{min}}(R)/3 > 0\), and \(\lambda _{\textrm{min}}\) denotes the minimum eigenvalue. Next, note that
which implies that
where \(\ell _1 \triangleq \lambda _{\textrm{max}}(Q^\textrm{T}Q)/\ell _0 > 0\) and \(\lambda _{\textrm{max}}\) denotes the maximum eigenvalue. Similarly,
Thus, substituting (A23) and (A24) into (A22), and using (A16)–(A18) yields
Finally, let \(\underline{r}_i \in (0,2)\) and consider the Lyapunov function \(V:{\mathbb R}^{3n} \times {\mathcal B}\times \cdots \times {\mathcal B}\times {\mathcal S}_1 \times \cdots \times {\mathcal S}_n \times {\mathcal S}_{\textrm{d,1}} \times \cdots \times {\mathcal S}_{\textrm{d,n}} \rightarrow [ 0, \infty )\) defined by
Using (A3), (A11) and (A25) to evaluate \(\dot{V}\) along the closed-loop trajectories yields that for all \((\xi , {\tilde{y}}_1,\ldots , {\tilde{y}}_n, s_1,\ldots , s_n, s_{\textrm{d,1}},\) \(\ldots , s_{\textrm{d,n}}) \in {\mathbb R}^{3n} \times {\mathcal B}\times \cdots \times {\mathcal B}\times {\mathcal S}_1 \times \cdots \times {\mathcal S}_n \times {\mathcal S}_{\textrm{d,1}} \times \cdots \times {\mathcal S}_{\textrm{d,n}}\),
where we omit the arguments from \(\dot{V}\).
To prove i), define \({\mathcal B}_i \triangleq \{ {\tilde{y}}_i \in {\mathbb R}^3 :\Vert {\tilde{y}}_i \Vert ^2 < 4-\underline{r}_i \}\). Since \(2 - Y({\tilde{y}}_i) = 2- \Vert {\tilde{y}}_i \Vert ^2/2\) and \(\underline{r}_i \in (0,2)\), it follows from (A27) that for all \((\xi , {\tilde{y}}_1,\ldots , {\tilde{y}}_n, s_1,\ldots , s_n, s_{\textrm{d,1}},\) \(\ldots , s_{\textrm{d,n}}) \in {\mathbb R}^{3n} \times {\mathcal B}_1 \times \cdots \times {\mathcal B}_n \times {\mathcal S}_1 \times \cdots \times {\mathcal S}_n \times {\mathcal S}_{\textrm{d,1}} \times \cdots \times {\mathcal S}_{\textrm{d,n}}\),
which is nonpositive. Thus, the origin is a Lyapunov stable equilibrium, which confirms i).
To prove ii), since \(R_i(0) \in {\mathcal R}_i\), it follows from (A10) that \(Y({\tilde{y}}_i(0)) = 1 - y_{\textrm{d,i}}^\textrm{T}(0) R_i(0) v_i <2\), which implies that
Furthermore, since (A11) implies that \(\dot{Y}({\tilde{y}}_i) \le 0\), it follows that for all \(t \ge 0\), \(Y({\tilde{y}}_i(t)) \le Y({\tilde{y}}_i(0))\). Thus, for all \(t\ge 0\),
Next, consider (A26) with \(\underline{r}_i\) replaced by \(r_i\), and it follows from (A27) with \(\underline{r}_i\) replaced by \(r_i\) and (A28) that for all \(t \ge t_0\),
which implies that V is nonincreasing. Thus, V is bounded, which implies that X is bounded. Since, in addition, X is radially unbounded, it follows that \(\xi \) is bounded, which implies that there exists \(\bar{\xi }_i > 0\) such that for all \(t \ge 0\), \(\Vert \xi _i(t) \Vert ^2 \le \bar{\xi }_i\). Since, in addition, \(\mu _i\) is continuous and its codomain is \((0,\infty )\), it follows that
Next, it follows from (C2) that
which implies that
Thus, using (5), (A30), and (A31) yields that for all \(t \ge 0\),
Next, since for all \(t \ge t_0\), \(s_i(t) \in {\mathcal S}_i\), it follows from (A1) and (A3) that \(\lim _{t \rightarrow \infty } {\tilde{s}}_i(t) = 0\). Since, in addition, for all \(t \ge 0\), \(s_{\textrm{d,i}}(t) \in {\mathcal S}_{\textrm{d,i}}\), it follows that
and using (A1) yields that for all \(t \ge t_0\),
Substituting (A6), (A32), and (A33) into (A29) implies that for all \(t \ge t_0\),
Next, define
and it follows from (A34) and (A26) that for all \(t \ge t_0\),
Thus, for all \(t \ge t_0\), \(V(t) \le e^{-\ell _5(t-t_0)} V(t_0)\). Since V converges exponentially to zero, it follows from (A26) that \(X(\xi )\), \(Y({\tilde{y}}_i)\), and \(Z_i(s_i,s_{\textrm{d,i}})\) converge to zero exponentially. Since \(Y({\tilde{y}}_i)\) converges to zero exponentially, it follows from (A6) that \({\tilde{y}}_i\) converges to zero exponentially. Next, since for all \(t \ge t_0\), \(s_i(t) \in {\mathcal S}_i\), it follows from (A1) and (A4) that for all \(t \ge t_0\), \({\tilde{s}}_i(t)^2 \le 2 {\bar{h}}_i^2 Z_i(s_i(t),s_{\textrm{d,i}}(t))\). Thus, \({\tilde{s}}_i\) converges to zero exponentially. Finally, note that for all \(t \ge t_0\),
Since \(X(\xi )\) converges to zero exponentially, it follows from (A20) that \(M_i(\xi _i)\) converges to zero exponentially. Thus, (A35) implies that \(\xi _i\) converges to zero exponentially, which combined with (A14) implies that \({\tilde{q}}\) converges to zero exponentially, which confirms ii).
To prove iii), since \(\lim _{t \rightarrow \infty } {\tilde{q}}_i(t) =0\), it follows from (16) that (O1) is satisfied. Next, note that since \(s_{\textrm{d,i}}\) is bounded, \(\lim _{t\rightarrow \infty } \xi _i(t) = 0\), \(\lim _{t\rightarrow \infty } {\tilde{s}}_i(t) = 0\), and \(\lim _{t \rightarrow \infty } {\tilde{y}}_i =0\), it follows from (A12) that \(\lim _{t\rightarrow \infty } \dot{{\tilde{q}}}_i(t) =0\), which confirms (O2). \(\square \)
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Heintz, C., Bailey, S.C.C. & Hoagg, J.B. Formation control for autonomous fixed-wing air vehicles with strict speed constraints. Auton Robot 47, 1299–1323 (2023). https://doi.org/10.1007/s10514-023-10126-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10514-023-10126-4