
Abstract
The gait transition of a quadruped walking robot is the switching of gait with non-periodic gait sequences between the periodic ones such as from walk to trot or trot to walk etc. It is very much important because the robot should change its gait depending upon the moving speed to enhance the efficiency of locomotion. In this paper, we present a quasi-static gait transition control method for a quadruped walking robot. It is based on the observation on the locomotion behaviors of quadruped animals, which show a sudden and discrete changes of gait patterns depending on the speed. The method predefines gait transition patterns, and gait sequences are determined according to the current and desired leg postures. It can be useful because the applicable to any type of walking controller. In this study, we implement the proposed method on a self-contained quadruped walking robot, called Artificial Digitigrade for Natural Environment Version III (AiDIN-III), and its effectiveness is experimentally validated.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The study of quadruped walking robots is a kind of classic issues in robotics and it has been performed by many researchers for long time (Raibert et al. 2008; Jinpoong Jinpoong; Rebula et al. 2007; Kimura and Fukuoka 2004; Koo et al. 2007, 2009). Recently, the importance of quadruped walking robots is emphasized again in accordance with the increasing necessity of robots with excellent mobility and adaptability in natural environments.
Along with the mechanical structure of a quadruped walking robot, its walking control is one of the most important issues in order to realize successful locomotion. Up to now various control methods have been reported, for example, trajectory-based control (Yoneda and Hirose 1995; Hunang et al. 2001; Choi et al. 2004), heuristic control (Chew et al. 1998; Pratt et al. 2001), and oscillatory reflex control (Kimura and Fukuoka 2004; Koo et al. 2009; Tran et al. 2009; Berns et al. 1999; Takeuchi 1999; Allen et al. 2003) etc. However, most of them just focus on single gait pattern such as walk or trot etc. It works well if the environmental conditions do not greatly change and the required speed of locomotion is constant. On the contrary, it is not appropriate in natural environments such as irregular, and rocky terrains. The switching of gait pattern is required to cope with various environmental conditions and improve the efficiency of locomotion. In reality, quadruped animals change gait patterns and speeds depending on the environmental conditions easily (Muybridge 1957; Alexander 2003; Santos et al. 2006). It is also required in the quadruped walking robots as illustrated in Fig. 1.

Illustration of a gait transition concept of the quadruped walking robots
To cope with the aforementioned problem, algorithms inspired from rhythmic patterns of biological systems have been studied such as central pattern generator (CPG), central nervous system (CNS), and cerebellar model articulation controller (CMAC) (Inagaki and Kobayashi 1993; Tsujita et al. 2008; Matos et al. 2009; Aoi et al. 2010, 2011; Lin and Song 2002; Remy et al. 2010; Santos and Matos 2011). However, these methods can applied to quadruped walking robots, but still not easy to generally used for gait transition control. They can satisfy the requirements of gait generation with effectively, but not leg motion planning. Currently, to control a quadruped robot’s locomotion involves simultaneously handling the motion of several legs. Furthermore, to control leg joints, position, velocity, and torque trajectories must be planned and thus, well-defined patterns are needed.
In this work, the locomotion and gait transition of quadrupeds are studied by observing the walking patterns, and stability is reviewed with respect to the stances in walking. In addition, a comprehensive analysis on determining factors of the gait transition is conducted. Based on these, a quasi-static gait transition control strategy is proposed. Its main idea is to use a predetermined actuation sequence of legs according to the phase of the feet in each gait pattern at the instance of gait transition. The method can perform any predefined gait transition sequence regardless of the complexity of the controller while preserving stability of the robot. The method will be implemented in a quadruped robot, called AiDIN-III and validate its effectiveness.
This paper is organized as follows. In Sect. 2, gait patterns and behaviors of the quadrupeds based on literature survey are overviewed. And we propose a gait transition idea for fast gait transition control of a quadruped robot. In Sect. 3, the gait transition control method of a quadruped walking robot is presented in details. This section includes the quasi-static gait transition control strategy between walking and trotting, and the controller structure. For evaluating the performance of the proposed idea, experiments are performed by using a quadruped walking robot, called Artificial Digitigrade for Natural Environment Version three (AiDIN-III) in Sect. 4. Finally conclusions are given in Sect. 5.
2 Overviews of quadruped’s locomotion
2.1 Gait patterns
Quadrupeds move with several gait patterns such as walk, pace, trot, and gallop etc. Among them, the walk and trot are the gaits typically used, which are switched depending on the required speed of locomotion and environmental conditions (Hildebrand 1965; Song and Waldron 1989).
Figure 2 shows the phase diagram of walk and trot gait of quadrupeds (Hildebrand 1965; Song and Waldron 1989). The open block represents swinging phase, and the closed block denotes supporting one. RF, RH, LF, and LH mean right-front leg, right-hind, left-front, and left-hind leg, respectively. Stride length is the driven distance of the leg in each walking step and \(\beta \) represents the duty factor.

Phase diagram of walk and trot gait
Walk is characterized by having at least three legs touching the ground without significant acceleration of the robot. At times, thus, all the feet touch the ground simultaneously. The operating sequences of the legs in walk gait is RH, RF, LH, and LF as shown in Fig. 2. The speed of the supporting phase must be kept lower than 1/3 speed of the swinging phase (Inagaki and Kobayashi 1993). Trot is the gait that two legs are actuated in pairs, for example two pairs of diagonal legs with LF–RH and RF–LH as shown in the trot diagram of Fig. 2 (Nunamaker and Blauuer 1985). The motion of the legs in these gait patterns can be divided into supporting and swinging phases (Inagaki and Kobayashi 1993). The supporting phase means the foot has contact with the ground, and support and propels the robot body. In the swinging phase, the foot is in the air, and is being repositioned for the next supporting phase. The step length is the distance between two consecutive feet of one leg on the ground, as shown in Fig. 2. The status of the foot in walk can be represented by the Duty Factor \(\beta \) defined as follows.
The duty factor means the ratio of the supporting period to the period of single period for one stride motion. In general, quadruped animals have duty factors of 0.75, 0.5 for walk and trot, respectively (Inagaki and Kobayashi 1993). The change of the duty factor implies gait transition and can be frequently observed in quadrupeds. Digitigrade animals such as dogs, cats, and horses select suitable gaits depending on the velocity of locomotion or the environmental conditions. They employ the walk gait in the lower speed and switch to the trot gait as the speed increases. It can be easily explained by using Froude number, which will be discussed in the next section in details (Cavagna et al. 1976; Griffin et al. 2004). The development of a gait transition method similar to the quadruped animals is possible if a suitable switching method of the gait is considered.
2.2 Observation of quadrupeds’ behaviors
In general, the quadruped on locomotion is simply characterized with Froude number defined as follows.
where v is the velocity of locomotion and g means gravitational acceleration. l denotes a characteristic length such as the height of the hip joint from the ground during standing as shown in Fig. 3 (Smith and Poulakakis 2004). It is based on the analysis of the inverted pendulum model as shown in Fig 3, assuming that quadruped animals have an interchange of kinetic and gravitational potential energy during locomotion (Cavagna et al. 1976; Griffin et al. 2004).

Illustration of the quadrupeds behaviors modeled as an inverted pendulum
Froude number can be used as an indicator of when the gait pattern switches according to the locomotion speed (Schmiedeler et al. 2001). In the case of \(F_{r} <\) 1, for instance, we expect the leg to be in compression at top of flight, and the gait represented by this number will tend to exhibit no appreciable swinging phases. At \(F_{r} \ge \) 1 we expect swinging phase to emerge. According to Alexander and Jayes (Alexander and Jayes 1983), for 1 \(\le F_{r} \le \) 2, we can see symmetric gaits emerge in quadrupeds.
2.3 Stability of walking
Research on locomotion stability has steadily proceeded for long time (Papadopoulos and Rey 1996; McGhee and Frank 1968; Messuri and Klein 1985; Nagy et al. 1994; Ghasempoor and Sepehri 1995; Lin and Song 1993; Yoneda and Hirose 1986; Fukuoka et al. 2003). The discriminant criteria for walking stability are the most important in walking control of quadruped robots. In general, stability criteria for a quadruped robot are divided into two cases according to the gait patterns: one is static stability in walk gaits (Papadopoulos and Rey 1996; McGhee and Frank 1968; Messuri and Klein 1985; Nagy et al. 1994; Ghasempoor and Sepehri 1995), and the other one is dynamic stability, typically the stability in trot gaits (Lin and Song 1993; Yoneda and Hirose 1986; Fukuoka et al. 2003).
Force-angle Stability Margin (FSM) (Papadopoulos and Rey 1996), Stability Margin (SM) (McGhee and Frank 1968), Energy Stability Margin (ESM) (Messuri and Klein 1985), Compliant Static Stability Margin (CSSM) (Nagy et al. 1994), and force based ESM (Ghasempoor and Sepehri 1995) are representative stability discriminants proposed by robotics researchers. Among these, SM is the most frequently used in static gait stability control of quadruped robots because it very much stable and applicable to the most static gait control. The left one in Fig. 4 shows the basic principle of SM. Under SM, quadruped walking robots can walk stably if the center of mass for the robot is located in a triangular area (the stability area) of the feet in the supporting phase during walking, as shown in Fig. 4.

Overview of stability criteria for the quadruped walking robot
Representative theories for dynamic gait stability include Dynamic Stability Margin (DSM) (Lin and Song 1993), Zero Moment Point (ZMP) (Yoneda and Hirose 1986), and Wide Stability Margin (WSM) (Fukuoka et al. 2003). Among these, DSM and ZMP need complicated computation processes. On the contrary, WSM is simple and it can help us control the stability just by controlling the leg’s supporting phase. The right side in Fig. 4 shows the basic principle of WSM. WSM is similar to SM, but extended to dynamic gaits as depicted in Fig. 4. Thus, WSM is applicable to stability control for dynamic gaits of the quadruped robots, such as the trot gait. In this work, we use SM and WSM for developing the gait transition patterns. They are advantageous because the stability control during the transition of gait can be simplified very much. The basic ideas of the gait transition control are explained in the following subsection.
2.4 Proposed idea
In order to control the gait transition the following three major issues need to be addressed: (1) the generation of the gait pattern which does not hamper the continuity of leg sequences, (2) the motion design to make the transition smooth, and (3) preserving the stability of the robot during transition.
In the first, we explain how to generate the transition gait patterns. In legged locomotion each leg experiences different phase positions. Thus, independent control of the velocity and phase for each foot are needed. We assume that the reference of each phase velocity and step length during gait transition is the LF leg. It is reasonable because the gait pattern is just phase relationship among the four legs and one of the four, that is LF can be the reference. Figure 5 displays the proposed transition gait pattern from “walk (Pattern A)” to “trot (Pattern B)” or vice versa. The phase change for a leg is clearly shown in the walk-to-trot gait transition step of Fig. 5.

Proposed gait transition pattern
For example, RF, LF, and LH maintain the current or next walking phase of the current walking pattern, and only RH changes from the supporting phase to the swinging phase differing from its regular walk sequence. The step length and velocity should be controlled as constraint conditions, because the walk gait has a different velocity and phase in the supporting phase compared with the trot gait. Thus, it is noted each leg attempts gait transition with minimum control of gait sequences. The trot-to-walk gait transition is even simpler than the walk-to-trot gait transition. The gait transition does not need to control the step length because the trot gait has the same velocity in the supporting and swinging phase, and diagonal pair of legs move together as shown in Fig. 2. Therefore, we can summarize the control sequences in the walk-to-trot and trot-to-walk gait transition as shown in Table 1.
Except the change of gait sequences, the robot should change its velocity during the gait transition. The change of velocity, that is acceleration or deceleration can be easily determined by using Eqs. (1) and (2) as follows.
where \(V_{Trot-normal}\) is the normal velocity of a trot gait and \(V_{Walk-normal}\) is the normal velocity of a walk gait. \(F_{Max}\) is the Froude number in the maximum velocity for the robot. \(\beta _{Max}\) represents the maximum Duty Factor, that is “1”. From Eqs. (3) and (4) the velocity differences in each gait transition state are calculated as
where \(\varDelta V_{deceleration}\) and \(\varDelta V_{acceleration}\) denote the velocity differences for each transition gait, respectively.
In the third, we address how to maintain the stability of the robot during the gait transition. As depicted in Fig. 6, the proposed method is based on SM (Stability Margin) and WSM (Wide Stability Margin). In the case of the walk-to-trot transition the gait transition will be performed, while three legs are stepped on the ground as illustrated in Fig. 6a. During the walk gait, the wavy motion of the CoM is needed to place the CoM inside the triangle made by footholds of support legs according to SM. On the contrary, the trot gait just keeps the CoM of the robot inside the quadrilateral made by two support legs and the projections of footholds of the other two swinging ones on the ground. According to WSM, the CoM is required to be on the geometric center of the robot. Thus, the CoM is shifted to the geometric center in advance and a leg is lifted in accordance with the trot gait pattern.

The stability during the gait transition in terms of SM and WSM (black dots is the foothold of the support legs and white dots represent the swinging ones), a the change of CoM position during walk-to-trot gait transition, b The change of CoM position during trot-to-walk gait transition
On the other hand, the trot-to-walk gait transition may not change the CoM, because the trot gait does not need CoM motion as shown in Fig. 6b. Thus, the trot-to-walk gait transition directly connects SM to WSM. After that, each gait uses the SM or WSM according to the desired gait patterns after finishing the gait transition.
We have addressed how to determine the gait pattern with respect to LF, but it is applicable to the other cases just by changing the reference leg. In following section, we introduce a control strategy for simplifying the situations and control variables to increase its applicability. The appropriate values of the velocity and step length are explained.
3 Gait transition control strategy
In this section, we address how to find desired foot trajectories and to choose the other gait patterns. In addition, the control sequences and the strategy are explained.
3.1 Foot trajectories
As mentioned previously, the gait transition has relation to many control variables because each leg has different phases during locomotion. As illustrated in Fig. 7 the locomotion sequence of the walk gait repeats footholds from Step 1 to Step 6. Thus, the gait features separate motions of the body’s CoM and the legs. For example, Step 1 and Step 4 need CoM motion, and the other steps accompany the motions of legs. Thus, three major status of the gait pattern exist as follows.
-
1)
Status 1: the right two legs are moved one by one for a step.
-
2)
Status 2: to be moving the CoM of the body toward the right side of the body.
-
3)
Status 3: the left two legs are moved one by one.
Thus, two front and hind legs of the left or right side are on the ground and have the same phase. For example, LH and LF, and RH and RF are the same phase in Step 1 and Step 4. Therefore, the method can reduce the burden of controller because the controller does not have to control four legs and body’s CoM at the same time.

Typical walk gait of the quadrupeds: the grey dotted-line boxes are body position in the previous locomotion step, and the grey solid-line boxes are the current body positions. The black circles are the supporting phases of the feet, the red closed circles are the swinging phases of the feet, and the red dotted-circles are the goal positions of the swinging feet. The red straight dotted-line is the base position of each step, and the black straight dotted-line is the center of the body position. SL is the step length (Color figure online)
In the second, we address how to design foot trajectories for the gait transition. We begin with a circular trajectory as shown in Fig. 8, and slight modifications can be allowed depending on the applications. The swinging phase starts from point A and accelerates through B, then decelerates from B through C, and ends at the point C. The rest of the trajectory, including the straight linear motion line from C to A, is the supporting phase. The foot trajectories described in Cartesian Space, can be used in both normal gait and gait transition. The trajectory can control the velocity, foot height, and step length. Also, the swinging and supporting phases can be independently controlled.

Proposed foot trajectories: \(SL\) is the step length, and H denotes the foot height
3.2 Control sequences for gait transition
The gait transition sequences are classified into two situations. The one is the sequence for walk-to-trot gait transition, and the other is that for the trot-to-walk gait transition. In this subsection, we explain how to build up the control sequences for these two cases based on the proposed ideas of transition and foot trajectories.
3.2.1 Walk-to-trot gait transition
As shown in Fig. 9, the transition steps are the combinations of two PHASEs, and two sub CASEs for each PHASE. PHASE represents the foot phase search for either the supporting or swinging phase for a pair of the left or right two legs. CASE denotes the foot position search for either the swinging phase for a pair of the front two legs or two hind legs.

Illustration of the status of each leg phase during the walk-to-trot gait transition
In the first, the walk-to-trot gait transition sequences are proposed. Figure 9 displays the operating status of each leg according to the current phase of each leg in the walk-to-trot gait transition without considering the CoM of the body. As shown in the right side of Fig. 9, the control strategy consists of the following sequences: (1) walk gait start, (2) a gait transition command is given, (3) current foot PHASE search of each leg, (4) current foot CASE search of each leg, (5) next swinging legs are selected, (6) increase the locomotion velocity to that of the trot gait, and (7) trot gait is accomplished. Here, each search element is detailed as follows.
-
PHASE: The swing status of the left or right side two legs.
-
PHASE 1 denotes the swing status of the left two legs.
-
PHASE 2 represents the swing status of the right two legs.
-
-
CASE: The swinging motion of the front or hind two legs in each PHASE.
-
CASE 1 is the swing status of the hind two legs in each PHASE. In this case, the trot gait transition is executed after the swinging motion of the front legs (the next are the swinging legs after the swinging motion of the hind legs in each PHASE) if the current swinging legs are the hind legs.
-
CASE 2 is the swing status of the front legs in each PHASE. In this case, the trot gait transition is immediately executed if the current swinging legs are the front ones.
-
The basic principle is to pre-make the start position of each foot and let the body’s CoM perform the trot locomotion. The transition gaits are carried out after swinging motion of the front legs, that is, after the swing of the front leg swing and the motion of the CoM.
The gait transition happens in one of four control situations according to the connection of each PHASE and CASE as shown in Fig. 9. If we generalize it, the gait is always switched at the same instance, that is just after the swing motion of the front legs by comparing operating sequences of each PHASE and CASE. Thus, the control variables are the same in all the control status of the gait transition.
Figure 10 visualizes the whole control sequences of the walk-to-trot gait transition based on Fig. 9. We can note each leg control sequence during the gait transition with the body’s CoM control via the proposed control status of PHASE and CASE. The control sequence has two control steps, and each step is divided into CoM control and foot position control. The transition control velocity \(V_{wt\_t}\) is determined as follows.
where \(V_{walk-normal}\) and \(V_{acceleration}\) can be obtained from Eqs. (4) and (6). \(V_{acceleration}/2\) is added in order to produce smooth gait switching by avoiding the sudden change of velocity during the transition. As the results, the control sequences are summarized as follows.
-
PHASE or CASE is selected depending on the instance when the start of the transition is activated.
-
A decision is made whether the swinging motions of the following hind legs are performed or not.
-
The body’s CoM is moved to the center line of the locomotion direction denoted as the black dotted line in Fig. 10.
-
The robot switches to the trot gait by using pairs of diagonal legs. For instance, they are RF–LH shown in Fig. 10a, and LF–RH in Fig. 10b. They include the front legs, that is RF in Fig. 10a, and LF in Fig. 10b. Both of them are the legs which have done the last swing motions. In addition, the robot uses the velocity of \(V_{wt\_t}\) during the transition step. Control sequences are chosen depending on the status of PHASE as follows.
-
PHASE 1 : Change the step length of the right two legs as SL/2 in the swing motion for each position control step.
-
PHASE 2 : Control value of the step length is the same as in PHASE 1, but the controlled target legs are the left two legs.
-
-
the normal trot gait from the next step.
In this section, we propose the control sequences of each leg and the position of CoM for walk-to-trot gait transition. In the next subsection, the control sequence of the trot-to-walk gait transition is addressed.

Illustration of the each leg control sequence including the body’s CoM control step in each status of Fig. 9; the black circles are the supporting phases of the feet, and the red circles are the swinging phase of the feet; the red dotted open circles are the next supporting positions of the swinging feet; the black dotted line is the center line of the locomotion direction between the left and right supporting feet; the red dotted line is the CoM position of the walk gait in relation to SM; and SL is step length; \(V_{wt\_t}\) is the transition velocity, a Control sequences in the PHASE 1 to CASE 1 or CASE 2, b Control sequences in the PHASE 2 to CASE 1 or CASE 2 (Color figure online)
3.2.2 Trot-to-walk gait transition
In this case, there are only two PHASEs. The basic principle and definition of the PHASE is similar to the walk-to-trot gait transition, but the criterion for identifying PHASE is different from the walk-to-trot gait transition. The case of PHASE in trot-to-walk has two legs on the ground as the supporting phase, while that of the walk-to-trot gait transition does three legs on the ground.
With this, we can identify the current walking pattern according to the number of legs on the ground. Additionally, no other consideration is needed in this case, because two diagonal legs always move together. As explained in Fig. 11, the trot-to-walk gait transition has six control steps without CASE step. The control steps are composed of the sequences such as (1) trot gait starts (2) The gait transition is activated (3) the current foot PHASE search of each leg (4) next swinging leg is selected for gait transition (5) decrease the locomotion velocity to walk gait (6) switch to the walk gait. Here, the PHASE 3 and PHASE 4 are defined as follows.
-
PHASE 3:
-
Both of LF and RH are in the swinging status.
-
The leg starting the transition step is LH.
-
-
PHASE 4
-
Both of RF and LH are in the swinging status.
-
The leg starting the transition step is RH.
-
Figure 11 can be re-drawn as Fig. 12 to easily explain the control sequences of each leg. Here, the transition velocity \(V_{tw\_t}\) is determined as follows.
where, \(V_{trot-normal}\) and \(V_{deceleration}\) can obtained by Eqs. (3) and (5). It helps a smooth gait transition by avoiding the sudden velocity change similarly to the walk-to-trot transition. As shown in Fig. 12 these sequences can be simplified with four steps similarly to the walk-to-trot transition. Based on Fig. 12 the control sequences are summarized as follows.
-
The PHASE is selected according to the instance when the transition command is activated.
-
The body CoM is moved to the CoM position of the walk gait (the opposite direction of the last moved hind leg).
-
An active leg is selected among the RH and LH (according to each PHASE), and the gait transition is started. The leg is moved with the velocity of \(V_{tw\_t}\) and the normal step length.
-
The next step uses the front leg of the active leg with the normal step length.
-
The body CoM is moved to the opposite CoM position of the previous position as the walk gait CoM motion.
-
The next step uses the opposite side hind leg of the chosen leg with the step length of 2SL.
-
The last step uses the front leg of the finally moved leg with step length 2SL.
-
The robot is switched to the walk gait from the next walking step.
4 Experimental validations
The proposed gait transition control strategy has been implemented on a quadruped walking robot, called AiDIN-III, and its performances were experimentally validated. In the experiments, we used a gait controller proposed by Trong et. al but the gait transition strategy can be applied to the other controllers (Tran et al. 2012).

Illustration of the status for each leg phase during the trot-to-walk gait transition

Illustration of the control sequences in the trot-to-walk gait transition; each element is the same as Fig. 10, a Control sequence in the PHASE 3, b Control sequence in the PHASE 4
Figure 13 shows the overall flowchart of the algorithm. When the leg transition sequence cannot be used to find a solution for the transition situation, the robot tries again the search step.

Overall flowchart of the proposed transition control
4.1 Outline of quadruped walking robot AiDIN-III
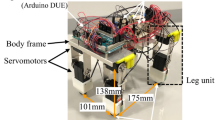
AiDIN-III shown in Fig. 14 has totally 16 DOFs, and each leg has 3 active joints and 1 passive one. The size of the robot is (394 (h) \(\times \) 389 (l) \(\times \) 135.5 (w) mm), and total weight is about 12.4Kg including all of parts on the interior and exterior. Each active joint is controlled by a DC motor with an encoder to measure joint angle. In addition, an IMU sensor is attached to the robot body to measure the orientation (roll-pitch-yaw angles), body linear acceleration and rotational velocity. Furthermore, each leg is equipped with a load cell (z-direction) to measure the linear force acting on linear passive joint and the contact ON–OFF state of the leg.

Quadruped robot AiDIN-III
The control system is based on Single Board Computer (SBC) and a realtime OS, called Xenomai is used for building up the control program. The motion command is delivered from a separate computer that connects to the SBC via wireless communication. Each motor is controlled by a dsPIC driving circuitry. These circuits communicate with SBC via CAN protocol.
4.2 Experiments
In the experiments, each of different gait patterns and transition were commanded and tested with the robot. The experiments were performed during 105 sec, and the robot walked with crawl and trot gait in 0.1 m/sec and 0.15 m/sec, respectively. The robot was run on various real environments such as flat terrain with blocks, irregular terrain with gravel etc. Gait transition commands were given as the following sequences: 1) the crawling, 2) trotting, 3) crawling, 4) trotting, 5) stop.
Figure 15 presents snapshots depicting the experiments in the flat terrain with blocks. In this figure, the step 5 (walking to trotting), step 8 (trotting to walking), and step 12 (walking to trotting) show the moment of the gait transition.

Snapshot of the gait transition control experiment on outdoor flat terrain: gait transition steps are walk to trot (step 5), trot to walk (step 8), and walk to trot (step 12)
Figure 16a shows the actual foothold position for the front left (FL) and right leg (FR), hind left (HL) and right leg (HR) of the robot in experiments. In this figure, the robot could follow the gait transition motion. \(5 \sim 32\) sec was the walk gait, and around t = 32.5 sec was the moment of gait transition from walk to trot. \(33 \sim 53\) was the trot gait and around \(53 \sim 55\) sec was the moment of gait transition from trot to walk, and \(55 \sim 83\) sec was walk gait. Around t = 83 was the moment of gait transition as walk to trot, and finally, \(84 \sim 105\) was the trot gait, again. As shown in this figure, proposed control strategy could perform the gait transition successfully.
Figure 16b shows the data measured from load cell when each foothold touched the ground. This sensor measured the state of each legs of the robot such as the swinging and the supporting state (i.e. each PHASEs and CASEs), and used to gait transition control of the robot. Comparing with Fig. 16a, b, it is noted that the sensor produced a reliable measurement for the state of each leg, and nicely used to control of the gait transition. In addition, Fig. 16c shows the changes of roll and pitch, yaw angle with IMU sensor during this task. The robot kept balance with smaller range of rolling and pitching, yawing angle as shown Fig. 16c.
In the second, the method was tested in the irregular terrain as shown in Fig. 17. In this figure, the step 4 (walking to trotting), step 7 (trotting to walking), and step 12 (walking to trotting) show the moment of the gait transition. The detailed data of this experiment is shown in Fig. 18. As shown in the figure, the robot switched the gate successfully and balanced well during the transition. In addition, the leg pose was also adapted very nicely.

The experimental data of the robot gait transition motion on flat terrain, a actual leg position, b load cell data at the foothold touch on the ground, c RPY angle of the body

Snapshot of the gait transition control experiment on outdoor irregular terrain: gait transition steps are walk to trot (step 4), trot to walk (step 7), and walk to trot (step 12)

The experimental data of the robot gait transition motion on irregular terrain, a actual leg position, b load cell data at the foothold touch on the ground, c RPY angle of the body
5 Conclusions
In this paper, we proposed a quasi-static gait transition control strategy prerequisite to modulate the speed of locomotion of the quadruped walking robot such as walk-to-trot and trot-to-walk gaits. It easily controls the gait transition without complex patterns just by adding new operating sequences of the legs in the gait transition. It is advantageous because it does not need dedicated controllers and can be included in various walking controllers. Also, the walking stability as well as independent control of the normal walking patterns such as walk or trot are guaranteed. We have implemented it in the robot AiDIN-III and its usefulness was validated. In fact, AiDIN-III cannot running gait not yet from mechanical elements such as vertebrae, whole weight, motor power, and etc. For this reason, we have not proposed the running trot (duty \(<\) 0.5) gait transition method in this paper, and we are working on it as the future works.
References
Alexander, R. M., & Jayes, A. S. (1983). A dynamic similarity hypothesis for the gaits of quadrupedal mammals. Journal of Zoology, 201, 135–152.
Alexander, R. M. (2003). Principle of animal locomotion. Princeton: Princeton University Press.
Allen, T. J., Quinn, R. D., Bachmann, R. J., & Ritzmann, R. E. (2003). Abstracted biological principles applied with reduced actuation improve mobility of legged vehicles. In Proceeding on IEEE/RSJ international conference on intelligent robots and systems, (pp. 1370–1375).
Aoi, S., Fujiki, S., Katayama, D., Yamashita, T., Kohda, T., Senda, K., & Tsuchiya, K. (2011). Experimental verification of hysteresis in gait transition of a quadruped robot driven by nonlinear oscillators with phase resetting. In Proceeding on IEEE/RSJ international conference on intelligent robots and systems, (pp. 2280–2285).
Aoi, S., Yamashita, T., Ichikawa, A., & Tsuchiya, K. (2010). Hysteresis in gait transition induced by changing waist joint stiffness of a quadruped robot driven by nonlinear oscillators with phase resetting. In Proceeding on IEEE/RSJ international conference on intelligent robots and systems, (pp. 1915–1920).
Berns, K., Ilg, W., Deck, M., Albiez, J., & Dillmann, R. (1999). Mechanical construction and computer architecture of the four-legged walking machine BISAM. IEEE/ASM transaction on mechatronics, 4(1), 32–38.
Cavagna, G. A., Thys, H., & Zamboni, A. (1976). The sources of external work in level walking and running. The Journal of Physiology, 262(3), 639–657.
Chew, C. M., Herr, H., Hu, J., Pratt, J., & Pratt, G. (1998). Virtual model based adaptive control of a biped walking robot. International Journal on Artificial Intelligence Tools, 8(3), 337–348.
Choi, Y. J., Yon, B. J., & Oh, S. R. (2004). On the stability of indirect ZMP controller for biped robot systems. Proceeding of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2, 1971–1996.
Fukuoka, Y., Kimura, H., & Cohen, A. H. (2003). Adaptive dynamic walking of a quadruped robot on irregulat terrain based on biological concepts. The International Journal of Robotics Research, 22(3–4), 187–202.
Ghasempoor., & Sepehri, N. (1995). A measure of machine stability for moving base manipulators. In Proceedings of IEEE international conference on robotics and automation, vol. 3, (pp. 2249–2254).
Griffin, T. M., Main, R. P., & Farley, C. T. (2004). Biomechanics of quadrupedal walking: how do four-legged animal achieve inverted pendulum-like movements? The Journal of Experimental Biology, 207, 3545–3558.
Hildebrand, M. (1965). Symmetrical gaits of horses. Science, 150, 701–708.
Hunang, Q., Yokosi, K., Shunji, K., Kaneko, K., Arai, H., Koyachi, N., et al. (2001). Planning walking pattern for biped robot. IEEE Transaction on Robotics and Automation, 17(3), 280–289.
Inagaki, K., & Kobayashi, H. (1993). A gait transition for quadruped walking machine. In Proceeding on IEEE/RSJ international conference on intelligent robots and systems, (pp. 525–531).
Kimura, H., & Fukuoka, Y. (2004). Biologically inspired adaptive dynamic walking in outdoor environment using a self-contained quadruped robot : Tekken2”. In Proceedings of IEEE/RSJ international conference on intelligent robots and systems, (pp. 986–991).
Koo, I. M., Trong, T. D., Kang, T. H., Vo, G. L., Song, Y. K., Lee, C. M., & Choi, H. R. (2007). Control of a quadruped walking robot based on biologically inspired approach. In Proceedings of ieee/rsj international conference on intelligent robots and systems, (pp. 2969–2974).
Koo, I. M., Kang, T. H., Vo, G. L., Trong, T. D., Song, Y. K., & Choi, H. R. (2009). Biologically inspired control of quadruped walking robot. International Journal of Control, Automation, and Systems, 7(4), 577–584.
Lin, B., & Song, S. (1993). Dynamic modeling, stability and energy efficiency of a quadruped walking machine. Proceedings of IEEE International Conference on Robotics and Automation, 3, 367–373.
Lin, J. N., & Song, S. M. (2002). Modeling gait transitions of quadrupeds and their generalization with CMAC neural networks. IEEE Transaction on System, Man, and Cybernetics-Part C: Application and Reviews, 32(3), 177–189.
Matos, V., Santos, C. P., & Pinto, C. M. A. (2009). A Brainstem-like modulation approach for gait transition in a quadruped robot. In Proceeding on IEEE/RSJ international conference on intelligent robots and systems, (pp. 2665–2670).
McGhee, R. B., & Frank, A. A. (1968). On the stability properties of quadruped creeping gaits. The International Journal of Mathematical Biosciences, 3, 331–351.
Messuri, D. A., & Klein, C. A. (1985). Automatic body regulation for maintaining stability of legged vehicle during rough terrain locomotion. IEEE Journal of Robotics and Automation, RA–1(3), 132–141.
Muybridge, E. (1957). Animals in motion. New York: Dover.
Nagy, P. V., Desa, S., & Whittaker, W. L. (1994). Energy-based stability measures for reliable locomotion of statically stable walkers: Theory and application. The International Journal of Robotics Research, 13(3), 272–287.
Nunamaker, D. M., & Blauuer, P. D. (1985). Normal and abnormal gait, the international veterinary information service. New York, USA: Ithaca.
Papadopoulos, E. G., & Rey, D. A. (1996). A new measure of tipover stability margin for mobile manipulators. Proceedings of IEEE International Conference on Robotics and Automation, 4, 3111–3116.
Pratt, J., Chew, C. M., Torres, A., Dilworth, P., & Pratt, G. (2001). Virtual model control: An intuitive approach for bipedal locomotion. The International Journal of Robotics Research, 20(2), 129–143.
Raibert, M., Blankespoor, K., Nelson, G., & Playter, R. (2008). “BigDog, the rough terrain quadruped robot”. In Proceedings of international conference on federation of automatic control, (pp. 10822–10825).
Rebula, J. R., Neuhaus, P. D., Bonnlander, B. V., Johnson, M. J., & Pratt, J. E. (2007). A controller for the littledog quadruped walking on rough terrain. In Proceedings of IEEE international conference on robotics and automation, (pp. 1467–1473).
Remy, C. D., Buffinton, K., & Siegwart, R. (2010). Stability analysis of passive dynamic walking of quadrupeds. The International Journal of Robotics Research, 29(9), 1173–1185.
Santos, P. G., Garcia, E., & Estremera, J. (2006). Quadrupedal locomotion. London: Springer.
Santos, C. P., & Matos, V. (2011). Gait transition and modulation in a quadruped robot: A brainstem-like modulation approach. The International Journal of Robotics and Autonomous Systems, 59, 620–634.
Schmiedeler, J. P., Marhefka, D. W., Orin, D. E., & Waldron, K. J. (2001). A study of quadruped gallops, NSF Design, Service and Manufacturing Grantees and Research Conference, (pp. 1–10).
Smith, J. A., & Poulakakis, I. (2004). Rotary gallop in the untethered quadrupedal robot scout II”. In Proceedings of IEEE/RSJ international conference on intelligent robots and systems, (pp. 2556–2561).
Song, S. M., & Waldron, K. J. (1989). Machines that walk. Cambridge, MA: MIT Press.
Takeuchi, H. (1999). Development of MEL HORSE. In Proceeding of IEEE international conference on robotics and automation, (pp. 1057–1062).
Tran, D. T., Koo, I. M., Moon, H., Cho J. S., Park, S., & Choi, H. R. (2012). Motion control of a quadruped robot in unknown rough terrains using 3D spring damper leg model. In Proceedings of IEEE international conference on robotics and automation, (pp. 986–991).
Tran, D. T., Koo, I. M., Vo, G. L., Roh, S., Park, S., Moon, H., & Choi, H. R. (2009). A new method in modeling central pattern generators to control quadruped walking robots. In Proceedings of IEEE/RSJ international conference on intelligent robots and systems, (pp. 129–134).
Tsujita, K., Kobayashi, T., Inoura, T., & Masuda, T. (2008). Gait transition by tuning muscle tones using pneumatic actuators in quadruped locomotion. In Proceeding on IEEE/RSJ international conference on intelligent robots and systems, (pp. 2453–2458).
Yoneda, K., & Hirose, S. (1986). Dynamic and static fusion gait of a quadruped walking vehicle on a winding path. Proceedings of IEEE international conference on Robotics and Automation, 1, 143–148.
Yoneda, K., & Hirose, S. (1995). Dynamic and static fusion gait of quadruped walking on a winding path. Advanced Robotics, 9(2), 125–136.
Acknowledgments
This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIP) (No. 2014R1A2A2A01005241).
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Supplementary material 2 (wmv 27145 KB)
Supplementary material 3 (wmv 50851 KB)
Supplementary material 4 (wmv 41870 KB)
Rights and permissions
About this article

Cite this article
Koo, I.M., Trong, T.D., Lee, Y.H. et al. Biologically inspired gait transition control for a quadruped walking robot. Auton Robot 39, 169–182 (2015). https://doi.org/10.1007/s10514-015-9433-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10514-015-9433-4