
Abstract
This study investigates the sub-daily polar motion (PM) derived from different estimation interval solutions ranging from 5 min/2 h. By analyzing a 3-year continuous time series of the PM estimates using Global Positioning System (GPS) observations, we conclude that PM should be parameterized as piecewise constant for intervals no longer than 30 min, while piecewise linear parameterization is more appropriate for longer intervals. The inconsistencies between the estimates and the background sub-daily PM model become more pronounced as the estimation intervals become shorter. The results demonstrate that applying continuity constraints enhances the accuracy of PM rate parameter estimation by approximately 20%. However, it is noteworthy that continuity constraints significantly modify and smooth the high-frequency content of the signal in PM. Therefore, when employing piecewise linear estimation, it is not recommended to use continuity constraints. Moreover, we find that sub-daily PM estimates are influenced by artificial signals, primarily caused by the resonance between the earth rotation and satellite revolution periods. These resonance signals are more obvious as the estimation interval becomes shorter, particularly at 4.8 and 8-h periods in the prograde and retrograde spectra, respectively. Finally, we implemented a sub-daily PM series with a 5-min temporal resolution and examined the recovery of the tidal coefficients for 38 tides. Overall, the residual signal amplitudes were generally small, with most of the main ocean tides below 5 μas. The largest residual signals were observed for S1 and K1 terms, with amplitudes of 13.1 and 18.0 μas, respectively.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Complex and multi-scale variations in the rotation of the solid earth are caused by the transfer of mass within the earth system and the exchange of angular momentum between its components (Gross et al. 2003). These variations are commonly characterized by earth orientation parameters (EOPs), which include polar motion (PM, expressed as X- and Y-pole coordinates), universal time (UT1), and the celestial pole offsets (dX, dY representing observed corrections to the theory of precession and nutation, respectively). PM refers to the movement of the earth’s spin axis around the mean pole in the earth’s crust-fixed frame and the precession-nutation is the same motion with respect to inertial space (Brzeziński et al. 2002, 2004). UT1 is solar time that represents the mean rate of the earth rotation. In addition, PM and UT1 are also known as earth rotation parameters (ERPs). Studying sub-daily variations (periods < 2 days that need sub-daily sampling) in earth's rotation contributes to a deeper scientific understanding of its dynamical system. These variations primarily arise from the redistribution and movement of mass in the solid earth, hydrosphere and atmosphere, with the hydrosphere having the most significant effect (Ray et al. 1994; Chao et al. 1996).
The current International Earth Rotation Service (IERS) convention, known as the IERS 2010 model, relies on ocean tide models derived from satellite altimetry data to predict diurnal and semidiurnal variations in PM and UT1 (Petit and Luzum 2010). In addition, the IAU2006A nutation model includes the effects of ocean tides on retrograde diurnal PM (Mathews et al. 2002). The Desai-Sibois model, based on the most recent TPXO8 ocean tide model, has demonstrated superior performance in predicting sub-daily variations compared to the IERS 2010 model (Desai and Sibois 2016). However, these models do not consider the non-tidal atmosphere and ocean dynamics driven by the so-called radiational effects on sub-daily ERPs. In fact, the excitation mechanism of the atmosphere and dynamic ocean, which contribute approximately 30 and 10% to the sub-daily variations in PM and UT1, respectively, are not well understood (Gross et al. 2009). Space geodetic techniques, such as Very Long Baseline Interferometry (VLBI) and Global Navigation Satellite Systems (GNSS), are sensitive to sub-daily variations in earth rotation. PM observed from space geodetic techniques can be used to measure the disparity between background models and theoretical excitation. In theory, GNSS techniques can only observe the PM due to the strong correlation of UT1 with satellite orbital parameters. Due to its global station coverage, continuous observations and increasing precision, GNSS, in particular, has been widely used to estimate the sub-daily variations in PM.
The sub-daily PM series derived from GNSS include the combined effect of both geophysical signals and the artifacts associated with the estimation strategy. Careful handling of artificial signals is essential as they can significantly impact the geophysical interpretation of the results. Previous studies conducted by Lutz et al. (2016) and Zajdel et al. (2020) have highlighted the superiority of long-arc solutions over 1-day solutions for estimated ERPs and the improvement in noise floor by employing long-arc solutions for sub-daily PM estimation. In addition, Hefty et al. (2000) and Rothacher et al. (2001) pointed out that solar radiation pressure (SRP) modeling issues could introduce systematic effects and artificial signals into GNSS-based PM series. The utilization of a priori box-wing models mitigates spurious signals in daily PM estimation (Peng et al. 2022) and improves the amplitudes of spurious signals at the harmonics of 24 h in sub-daily estimation. Moreover, the combined multi-GNSS solution reduces spurious signals arising from the resonance between the earth rotation and the specific system satellite revolution periods (Zajdel et al. 2021).
Most studies primarily focus on improving the quality of PM estimation by enhancing orbital parameter estimation strategies, but discussions regarding sub-daily PM parameter estimation models are often overlooked. Generally, shorter update intervals are considered more suitable for capturing the full range of PM variations over time periods. A 15-min temporal resolution is currently the highest update interval estimated from GNSS observations (Sibois et al. 2017). However, it should be noted that the overlapping accuracy of the PM parameters tend to decline as the temporal resolution increase. Sibois (2011) found that the processing interval of the network solution limits the maximum frequency update of the PM estimates. When the update period of the PM parameters reaches the limit of the processing interval, the correlation between the orbital states of the GNSS satellites and the PM parameters becomes very high, and the accuracy of the PM parameters suddenly diverges. Moreover, the continuous piecewise linear method is widely used for sub-daily PM parameter estimation when the temporal resolution is reduced to 1–2 h (Hefty et al. 2000; Englich et al. 2007; Artz et al. 2012; Rothacher et al. 2001; Zajdel et al. 2021). This parameterization establishes continuity in the parameter series by applying additional constraints, improving the accuracy of the PM estimates, especially for the rate parameters. However, the continuity constraint will smooth the signal at near 2-day periods and force some spurious signals into the daily PM estimates (Ray 2008). Similarly, undesirable side effects are expected in the sub-daily estimation when the continuity constraint is applied.
In this study, we finally provide a fully homogeneous and continuous three-year series from 2019 to 2022, with a 5-min temporal resolution of the PM from GPS observations. Our primary objective is to evaluate the impact of different estimation intervals on the recovery of signals from PM estimates and assess the quality of our PM solution with such a high temporal resolution. Therefore, observations from other GNSS constellations are not considered in our processing for the time being. We first describe our estimation strategy for generating sub-daily PM estimates based on GPS ground tracking data. Then we evaluate the PM estimates solved from different estimation intervals and conduct a significance test for the pole coordinate rate parameters. Afterward, the impact of continuity constraints on the quality of sub-daily PM is discussed in the time and frequency domains. Finally, we investigate both tidal and non-tidal signals in the time series of sub-daily PM estimates and shed light on the factors that influence the accuracy of sub-daily PM estimates.
Estimation strategy
This section provides an overview of the methodology used to estimate sub-daily PM from GPS observations and describes the solutions adopted in this study. The calculations were performed using the Position And Navigation Data Analyst (PANDA) software (Liu et al. 2003). The sub-daily pole coordinates time series were derived from GPS observations collected by a globally distributed network of around 120 stations (as shown in Fig. 1). A network solution is adopted for precise orbit determination and sub-daily PM estimation. The processing details and the background models are summarized in Table 1. In our processing solution, the estimated parameters include station coordinates, orbital parameters (satellite position, velocities and solar radiation pressure parameters), satellite and receiver clocks, tropospheric delay and gradient parameters, ambiguities, pole coordinates and rates with sub-daily resolution, and pseudo-stochastic pulses. Three years of GPS data, from DOY 150, 2019 to DOY 150, 2022 are processed with a 5-min processing interval. We tested various arc lengths and found that 3-day arcs with a moving 1-day window yielded the best accuracy. We have estimated independent midpoint PM and rates for each interval. In addition, UT1-UTC is not estimated but is fixed to the IERS 14C04 solution. By convention, retrograde diurnal polar motion is considered pure nutation motion. Thaller et al. (2007) already described the problem of a one-to-one correlation between retrograde diurnal term of PM, nutation terms and satellite states. Nutation itself is not observable by satellite systems orbiting the earth. Therefore, the singularity between the retrograde diurnal term of PM and the orbital parameter should be resolved when dealing with sub-daily PM estimation using GPS. We use a zero-mean constraint to block the retrograde diurnal PM component, following the approach outlined by Hefty et al. (2000). The IERS provides standard pole coordinate time series, which are typically resolved daily. The lack of continuous sub-daily standard pole coordinates limits the external evaluation of our estimate. In this article, only the central daily estimates of the 3-day solution were analyzed to avoid boundary effects in our processing. In order to gain insight into the quality of our pole coordinate estimates, we evaluate the time series through time and frequency domain analyses.

Distribution of the 120 MGEX stations
The utilization of a reasonable background model is essential for accurate sub-daily PM estimation, as highlighted by Sibois et al. (2017). In our study, the Desai-Sibois (Desai and Sibois 2016) and IERS libration (Mathews and Bretagnon 2003) models are both applied in the GPS-based pole coordinate generation process to predict the effects of the oceans and libration on sub-daily ERPs. We aimed to investigate the influence of different estimation intervals on sub-daily PM estimation. However, it is essential to discuss the modeling of PM parameters throughout the estimation interval. Table 1 summarizes the variable processing strategy in our experiment. We adopted two parameterization approaches for the PM parameter: constant and linear. This allowed us to explore the performance of PM estimates under different modeling assumptions. We employed different time intervals to investigate the impact of intervals on sub-daily PM estimation, including 5, 15, 30-min, 1 and 2-h. We observed a substantial reduction in the correlation between the satellite orbital states and PM parameters after blocking the retrograde diurnal PM. A correlation analysis when the PM parameter update period is equal to the processing interval is shown in Fig. 2. When the retrograde diurnal PM is not blocked, the position and velocity parameters of the G01 satellite exhibit a strong correlation with the pole coordinates. Similarly, a significant correlation is observed between the X-pole coordinates at different epochs. As a result, the pole coordinates cannot be accurately estimated (Sibois 2011). However, once the retrograde diurnal PM is blocked, the previously observed correlations between the pole coordinates and satellite states, and between different pole coordinates, are considerably diminished. Therefore, a 5-min temporal resolution of the PM can be estimated.

Correlations between X-pole coordinates and orbital parameters for the 5-min interval solution in DOY 150, 2019. (1) retrograde diurnal PM is not blocked (2) retrograde diurnal PM is blocked. Only the correlations between the X-pole coordinates of the first three epochs and the orbital parameters of the G01 satellite are shown for clarity
Spectral analysis of sub-daily PM estimates
Here, in order to determine the period and amplitude of residual signals, the time series of sub-daily PM estimates were analyzed in the frequency domain. The sub-daily PM estimates were derived using both piecewise constant and linear methods, utilizing estimation intervals of 2, 1-h, 30, 15, and 5-min, respectively. We first analyzed the spectrum of the estimated PM rates. Figure 3 demonstrates the power spectra for the estimated X-pole coordinate rate series derived from the linear solution using various estimation intervals. Except for the 5 and 15-min solutions, the power spectrum shape for the X-pole coordinate rates is similar to white noise. The power spectrum of the estimated pole coordinate rates with different estimation intervals varies significantly. Shorter estimation intervals lead to increased noise in the power spectrum at high frequencies, making the estimated rates less stable and more prone to spurious signals. The power spectrum of 2, 1-h and 30-min solutions have distinct signals close to 24, 12, 8 and 6-h periods, which are attributed to various factors such as atmospheric effects, errors in background models, spurious signals from resonance between the earth rotation period and satellite revolution period and so on. The pole coordinate rates are probably useful as a probe of the geophysical excitation. However, the estimated rates are unstable and heavily contaminated by spurious signals when the estimated interval is shorter than 15-min. The source of these spurious signals is unclear, but may be due to unreliable estimates resulting from a lack of sufficient observations.

Power spectrum of the estimated X-pole coordinate rate series derived from the linear solutions with different estimation intervals (Period < 2 days). The periods represented by the gray dashed lines are marked. Y-pole coordinate rates showed similar performance
We also tested rate parameters derived from different estimation interval solutions to determine their significance. The significance of rate parameters can be determined through a general linear hypothesis test on parameters (Koch 1999; Teunissen 2000). Two hypotheses are typically postulated for rate parameters:
where \(E\left( \ldots \right)\) is expectation operator; and \(\hat{v}_{i}\) is the estimated rate at epoch \(i\); \(\tilde{v}_{i}\) is the truth value of the rate. In our hypothesis testing, the hypothesis \(H_{0}\) is accepted as true. According to this assumption, the following test statistic has the t-distribution:
where \(D_{{v_{i} v_{i} }}\) is the variance, which is obtained from the estimated covariance matrix. The test statistic w has the t-distribution with \(n - 1\) degrees of freedom, where \(n\) represents the number of estimated rates. The probability of incorrectly rejecting the hypothesis \(H_{0}\) is represented by the significance level (\(\alpha\), \(\alpha = 0.05\) in our significance test). The hypothesis \(H_{0}\) is accepted with a confidence level of \(1 - \alpha\) if:
Then, if the test statistic w exceeds the threshold value \(t_{{\left( {\frac{\alpha }{2}} \right)}}\), the hypothesis is rejected with the risk of \(\alpha\)-probability. Therefore, each rate estimate \(\hat{v}_{i} \left( {i = 1,2, \ldots ,m} \right)\) is individually tested using the variance \(D_{{v_{i} v_{i} }}\) with the test statistic in (2) at the significance level of \(\alpha = 0.05\). The number k of the rate parameters that pass this test are counted to estimate the mean success rate (MSR) (Hekimoglu and Koch 1999):
The MSRs obtained for each estimation interval are presented in Table 2. Since we now assume that the hypothesis \(H_{0}\) is accepted as true, the MSRs provide the probability of correctly accepting the hypothesis \(H_{0}\). As shown in Table 2, the MSRs increase gradually as the estimation interval becomes shorter. The MSRs exceed 70% when the estimation interval does not exceed 30 min. Consequently, we assume that the rate parameters are almost negligible for estimation intervals falling within this range. In other words, the sub-daily PM should be parameterized as a piecewise constant. However, when the estimation interval is increased to 1-h, the MSR drops below 50%. When the estimation interval is 2 h, the MSR is 0%, which means that the \(H_{0}\) is completely rejected. Therefore, when the estimation interval exceeds 1-h, it is advisable to use the piecewise linear method for PM estimation. Furthermore, in geophysical excitation studies, using the offset values rather than the rate values would be more reliable. Figure 4 displays the difference of power spectra of the estimated X-pole coordinate series derived from the piecewise constant and piecewise linear solutions using different estimation intervals. If the constant method was incorrectly used in the 2 and 1-h estimation interval solutions, it would lead to the smoothing of the X-pole coordinate series signals. The most notable smoothing occurs around the period of 24 h. Even though the linear method is used for estimation intervals shorter than 30 min, the power spectra exhibit similar performance to the constant method series. This means that the rate parameters may have a minimal effect on the associated PM offset estimates.

Difference of power spectrum of the estimated X-pole coordinate series derived from the linear and constant solutions with different estimation intervals (Period < 2 days). Positive values indicate that the amplitude is larger using the linear method than the constant method. The periods represented by the gray dashed lines are marked. Please note different scales for the y-axis
We then investigate the impact of different estimation intervals on the quality of the estimated PM using this optimal method. The mean and root mean square (RMS) of the estimated PM series are presented in Table 3. The offsets for X- and Y-pole coordinates remain consistent throughout all estimation intervals, with values of 2.5 and 4.2 μas, respectively, which are aligned with the daily solutions (Peng et al. 2022). We conclude that the estimation of sub-daily PM will not introduce any further systematic offsets. The RMS values of X-pole (Y-pole) coordinate estimates are 60.9 (60.1), 63.7 (63.0), 65.3 (64.6), 66.6 (65.8) and 68.2 (67.3) μas for 2, 1-h, 30, 15 and 5-min solutions, respectively. The RMS of the estimated PM reflects discrepancies between the observations and the a priori values, with these inconsistencies becoming more pronounced as the estimation intervals become shorter.
Impact of continuity constraints
The utilization of piecewise linear method is recommended when the estimation interval exceeds 1-h. Introducing continuity constraints in PM estimation can improve the stability of PM estimates, particularly for daily resolutions (Brockmann 1997). However, it is important to acknowledge that continuity constraints may also introduce artificial signals and smooth out signals in the PM estimate series. To assess the impact of continuity constraints on sub-daily PM estimation, we conducted a comparative analysis between PM series derived from solutions with and without continuity constraints. The discontinuities of the sub-daily PM time series are presented as the differences at each estimation boundary, which can be calculated as follows:
where \(offset_{12}\) and \(rate_{12}\) represent the PM and PM rate estimates for two successive intervals. \(T\) denotes the estimation interval.
Figure 5 illustrates the discontinuities in sub-daily PM estimates using a 2-h estimation interval. The corresponding RMS of these differences is also depicted in Fig. 5 for each PM component. The observed discontinuities primarily reflect the behavior of PM rate estimates. As shown, the solutions with continuity constraints exhibit reduced overall scatter. Specifically, after imposing continuity constraints, the RMS values decreased from 37.9 s to 30.5 μas for X-pole and from 38.9 to 31.4 μas for Y-pole coordinates, respectively. This represents an improvement of about 20% in RMS compared to the solutions without continuity constraints. Furthermore, Fig. 6 depicts the power spectra of the estimated PM series based on a 2-h estimation interval. For periods shorter than 2 days, the power spectra demonstrate a single power law behavior, characterized by a spectral index of approximately − 1.6. However, when continuity constraints are added, the power spectra of both the X- and Y-pole coordinates gradually steepen at the highest frequencies, nearing the Nyquist limit of 0.25 cycles/h. As analysis of International GNSS Service (IGS) PM daily estimates by Ray (2008) indicated, the continuity constraint may be characterized as a peculiar phase filter that allows Nyquist-frequency signals with cosine phase aligned to the boundary to pass through but attenuates the same frequency signal exactly when the phase is shifted by 90 degrees. As a result, it significantly modifies and smooths the high-frequency content of the signal, with the greatest effect, particularly at the Nyquist frequency. Compared to the independent linear parameterization, the application of continuity constraints reduces the power at the Nyquist frequency by an order of magnitude. As shown in Fig. 6, the smoothing and signal distortion effects range from 4 h to approximately 8 h. Therefore, although the continuity constraints can improve the stability of the sub-daily PM estimates, it is advisable to use the independent linear parameterization due to the potential undesirable side effects it may introduce.

Estimated sub-daily PM discontinuities at estimation boundaries based on a 2-h estimation interval. The labels "With" and "Without" denote the solutions obtained with and without continuity constraints, respectively

Power spectrum of the estimated sub-daily PM series (Period < 2 days). A black power-law line with a spectral index of -1.6 is plotted on each plot. The periods represented by the gray dashed lines are marked. The labels "With" and "Without" denote the solutions obtained with and without continuity constraints, respectively
Tidal and non-tidal signals in PM variations
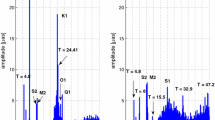
Ideally, the sub-daily PM estimates should resemble white noise if all excitations have been accurately incorporated in the a priori model. However, limitations in the background model, satellite and earth revolution aliasing, and processing deficiencies may introduce spurious signals, affecting the estimates. Hence, it is important to distinguish between strategy artifacts and real geophysical signals. In this subsection, we will try to interpret the residual signals in our PM estimates and discuss the effect of different estimation intervals on these signals. Figures 7 and 8 illustrate the spectra of the estimated PM series derived from different interval solutions, which are conventionally decomposed into prograde and retrograde directions separately. The noise floor is evaluated using the RMS of the amplitudes in the frequency domain. The noise levels in both the prograde and retrograde directions are consistently low, less than 1 μas. However, multiple signal lines are clearly observed, exceeding the noise level in both spectra. Two distinct group signals can be identified: (1) the signals at the diurnal and semidiurnal bands, which are in proximity to the theoretical periods of the main ocean tides, marked by cyan lines. (2) the signals resulting from resonance between the earth's rotation period and the satellite revolution period, denoted by magenta lines. These resonance periods can be described as (Zajdel et al. 2021):
where \(f_{s}\) and \(f_{e}\) are the frequencies of the revolution period of the GPS satellite and of the diurnal rotation of the Earth, respectively; \(n\), \(m\) are small integer numbers.

Amplitude spectra of the estimated PM series, prograde parts for different estimation interval solutions

Amplitude spectra of the estimated PM series, retrograde parts for different estimation interval solutions
The first group of signals observed in our analysis may reflect the limitations of the background model for the ocean tide effects on sub-daily PM variations. The residual signals in the prograde spectra are more prominent in the diurnal band than the semidiurnal band. The largest discrepancies occur in the K1 tide, where the amplitude is close to 20 μas. The retrograde PM spectra show signals with periods ranging from 20 to 28-h that approach zero, resulting from the zero constraints on blocking retrograde diurnal motion (Thaller et al. 2007). The residual signals in the semidiurnal band for the retrograde spectrum are below 5 μas. To perform a more extensive tidal analysis, we estimated the coefficients of the sine and cosine terms of diurnal and semidiurnal variations in a constrained least-squares adjustment according to Desai and Sibois (2016). We use the estimated pole coordinates as observations and weight them by the formal errors. According to the Rayleigh’s criteria for the separation of two spectral lines, we successfully distinguished a total of 38 tidal terms from a span of 3 years data (Zajdel et al. 2021). These terms comprised 25 diurnal and 13 semidiurnal components. To accurately estimate the coefficients of the major tides, we impose constraints on the coefficient ratio between the major and their sideband tides (e.g., K1, K1’ and K1’’, Gipson 1996). Subsequently, we calculated the amplitudes of the estimated PM series in each of the prograde and retrograde directions. Figure 9 illustrates the amplitudes of the estimated PM series from different interval solutions for the 9 most dominant ocean tides, labeled as N2, M2, S2, K2, Q1, O1, P1, S1 and K1. A clear trend that can be observed in Fig. 9 is that the residual ocean tidal signal gets larger as the estimated interval becomes shorter. However, the difference in the amplitudes of the main ocean tides from different interval solutions is within 0.5 μas. Thus, it can be concluded that a reasonable variation in the length of the estimation interval has a negligible influence on the recovery of the variations in PM driven by the ocean tides. To determine the accuracy and precision attainable at 5-min temporal resolution, the amplitudes and percentages of the remaining tidal signals relative to the size of the Desai-Sibois model from the 5-min estimation interval solution are shown in Table 4. The residual signal amplitudes, in general, are relatively small, typically below 5 μas for most of the dominant tides. In addition, the percentages of the remaining tidal signals relative to the size of the Desai-Sibois model are less than 15% except for the S1 term. However, there are larger residual signals clearly visible for S1 and K1 terms, with amplitude of 13.1 and 18.0 μas, respectively. For the S1 tidal term, most of the network parameters, such as station coordinates and orbit parameters, are estimated with a 24-h or integer multiples of the 24-h interval, which coincides with the period of S1 tide. Consequently, the discontinuity of these estimate parameters in our solutions will contribute to the signal within a period of 24 h. The S1 term is not one of the main tidal terms and has an amplitude of only 1.3 μas in the Desai-Sibois model. Thus, the remaining percentage of the S1 tide is up to 1004.5% in Table 4. As for the K1 tidal term, it is worth noting that the repeat period of the GPS constellation, which lasts approximately 23 h and 56 min, coincides with the period of K1 tide. As a result, the resonance signal is expected to alias into the sub-daily PM estimated specifically for the K1 tide. Furthermore, the residual signals exhibit prograde diurnal amplitudes of 18.0, 2.5, 4.2 and 2.7 μas for K1, P1, O1 and Q1, respectively. The semidiurnal amplitudes in the prograde and retrograde components are as follows: 1.0 and 3.8 μas for K2, 3.1 and 4.9 μas for S2, 2.4 and 4.7 μas for M2, and 0.8 and 2.1 μas for N2, respectively. Notably, the amplitudes of the residual signals listed in Table 4 are comparable to the results reported by Sibois (2019).

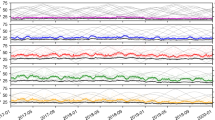
Comparison of the amplitudes for 9 main ocean tides between different interval solutions for prograde and retrograde directions
The second group is caused by the resonance between the earth rotation period and the satellites resolution period, which is not a true geophysical signal. As shown in Figs. 7 and 8, the magenta lines match well for most of these spurious signals. The amplitude of the most pronounced resonant signal in the prograde spectra, at a period of 4.8-h, is 9.4, 13.7, 13.9, 14.0 and 14.0 μas for 2, 1-h, 30, 15 and 5-min solutions, respectively. In the retrograde spectra, a clear signal is observed at 8 h, with amplitudes of 6.4, 6.8, 6.9, 7.0 and 7.0 μas for the corresponding interval solutions. Therefore, we can infer that as the estimation interval becomes shorter, the resonance signals become more pronounced. In fact, sub-daily variations at 6, 8, 12, 24 h are also partly attributed to atmospheric tides and non-tidal atmosphere, dynamic ocean, and continental hydrosphere angular momenta (de Viron et al. 2005). However, accurately distinguishing and measuring the individual contributions of these factors remains a challenge, as we can only observe the combined effects. Additionally, signals are visible at the periods of 23.46, 23.73 and 24.26 h, none of which belong to any group mentioned above. There is even a peak of about 10 μas at the period of 23.73-h. These signals may be derived from some deficiencies in our processing approach. To investigate the residual signals within the periods of 4-h, the prograde and retrograde spectra for periods less than 4 h are plotted in Fig. 10. It is observed that the amplitudes of many visible signals exceed 1 μas, with a maximum of 3 μas. At first sight, all visible signals can be attributed to resonance signals. However, it is crucial to acknowledge that the periods of actual geophysical signals may also align with resonance periods. Therefore, additional theoretical support is necessary to substantiate our results.

Amplitude spectra of the estimated PM series derived from 5-min estimation interval solution, prograde and retrograde parts for periods < 4 h
Conclusion
The GNSS technique can be used for the recovery of the pole coordinates with a sub-daily resolution. We investigate the impact of different estimation intervals on GPS-based sub-daily PM estimation. Initially, a significance test is performed on the sub-daily pole coordinate rates, revealing that the rate parameters are almost negligible for estimation intervals that do not exceed 30 min. Consequently, PM should be parameterized as piecewise constant for intervals no more than 30 min and as piecewise linear for longer intervals. It is worth noting that the rate parameters have a minimal effect on the associated PM offset estimates. The RMS of the estimated PM series increases as the estimation intervals become shorter.
Moreover, the continuity constraints can enhance the PM rate parameter estimation accuracy by approximately 20%. However, the continuity constraints act as a peculiar phase filter. It passes signals at Nyquist frequency with the cosine phase aligned to the boundary while attenuating the same frequency signal exactly when the phase is shifted by 90 degrees. As a result, the continuity constraints significantly modify and smooth the high-frequency content of the signal, with the greatest effect, particularly at the Nyquist frequency. Therefore, although the continuity constraints can improve the stability of the sub-daily PM estimates, it is advisable to use the independent linear parameterization due to the potential undesirable side effects it may introduce.
Furthermore, two groups of signals can be identified in the estimated PM series. The first group is the signals at the diurnal and semidiurnal bands, which are proximate to the theoretical periods of main ocean tides. The second group results from resonance between the earth's rotation and satellite revolution periods. We found no significant difference in the residual signals at the diurnal and semidiurnal bands close to the ocean tidal constituents between different interval solutions. We estimated coefficients for all 38 tidal terms using the 5-min estimated PM series. The residual signal amplitudes generally are below 5 μas for most the dominant tides. The largest residual signals were observed for S1 and K1 terms, with amplitudes of 13.1 and 18.0 μas, respectively. In addition, the resonance signals become more pronounced as the estimation interval becomes shorter, particularly at 4.8 and 8-h periods in the prograde and retrograde spectra, respectively. Although the resonance signals can explain most of the residual signals, accurately separating the true variation at 6, 8, 12, and 24-h caused by atmospheric tides and dynamic ocean remains challenging. Finally, we also discuss the residual signals within the period of 4-h. However, as the periods of actual geophysical signals may align with resonance periods, we need more theoretical support to substantiate our results. On the other hand, the impact of the spurious signals in the frequency domain shows a notable decrease in the combined multi-GNSS solution (Zajdel et al. 2021). However, the contribution of the BeiDou constellation was not mentioned. The observation period of most BeiDou satellites is close to 3 years. Adding BeiDou observations to the sub-daily PM estimation may decorrelate and attenuate some of the spurious signals, which needs further investigation.
Data availability
The GNSS data of MGEX are provided by the IGS and can be accessed through https://cddis.nasa.gov.
References
Arnold D, Meindl M, Beutler G, Dach R, Schaer S, Lutz S, Prange L, Sośnica K, Mervart L, Jäggi A (2015) CODE’s new solar radiation pressure model for GNSS orbit determination. J Geod 89(8):775–791. https://doi.org/10.1007/s00190-015-0814-4
Artz T, Bernhard L, Nothnagel A, Steigenberger P, Tesmer S (2012) Methodology for the combination of sub-daily Earth rotation from GPS and VLBI observations. J Geod 86(3):221–239. https://doi.org/10.1007/s00190-011-0512-9
Boehm J, Niell A, Tregoning P, Schuh H (2006) Global Mapping Function (GMF): a new empirical mapping function based on numerical weather model data. Geophys Res Lett 33(7):L07304. https://doi.org/10.1029/2005GL02554
Boehm J, Heinkelmann R, Schuh H (2007) Short note: a global model of pressure and temperature for geodetic applications. J Geod 81(10):679–683. https://doi.org/10.1007/s00190-007-0135-3
Brockmann E (1997) Combination of solution for geodetic and geodynamic applications of the Global Positioning System (GPS). PhD thesis, Swiss Geodetic Commission, Zurich. https://www.sgc.ethz.ch/sgc-volumes/sgk-55.pdf
Brzeziński A, Bizouard C, Petrov S (2002) Influence of the atmosphere on earth rotation: What new can be learned from the recent atmospheric angular momentum estimates? Surv Geophys 23(1):33–69. https://doi.org/10.1023/A:1014847319391
Brzeziński A, Ponte R, Ali A (2004) Nontidal oceanic excitation of nutation and diurnal/semidiurnal polar motion revisited. J Geophys Res Solid Earth 109:B11407. https://doi.org/10.1029/2004JB003054
Chao B, Ray R, Gipson J, Egbert G, Ma C (1996) Diurnal/semidiurnal polar motion excited by oceanic tidal angular momentum. J Geophys Res 101(B9):20151–20163. https://doi.org/10.1029/96JB01649
Petit G, Luzum B (eds) IERS Conventions (2010) Frankfurt am main: Verlag des Bundesamts für Kartographie und Geodäsie, 179pp. ISBN 3–89888–989–6. https://iers-conventions.obspm.fr/conventions_versions.php
Desai S, Sibois A (2016) Evaluating predicted diurnal and semidiurnal tidal variations in polar motion with GPS-based observations. J Geophys Res Solid Earth 121(7):5237–5256. https://doi.org/10.1002/2016JB013125
deViron O, Schwarbaum G, Lott F, Dehant V (2005) Diurnal and subdiurnal effects of the atmosphere on the Earth rotation and geocenter motion. J Geophys Res 110:B11. https://doi.org/10.1029/2005JB003761
Dilssner F, Laufer G, Springer T, Schönemann E, Enderle W (2018) The BeiDou attitude model for continuous yawing MEO and IGSO spacecraft. EGU 2018, Vienna. http://navigation-office.esa.int/attachments_29393052_1_EGU2018_Dilssner_Final.pdf
Englich S, Mendes-Cerveira PJ, Weber R, Schuh H (2007) Determination of Earth rotation variations by means of VLBI and GPS and comparison to conventional models. Vermess Geoinf 2:104–112. https://www.erdrotation.de/publication_p08_englich_vgi2007_003.pdf
Gipson J (1996) Very long baseline interferometry determination of neglected tidal terms in high-frequency Earth orientation variation. J Geophys Res Solid Earth 101(B12):28051–28064. https://doi.org/10.1029/96JB02292
Gross R, Fukumori I, Menemenlis D (2003) Atmospheric and oceanic excitation of the Earth’s wobbles during 1980–2000. J Geophys Res 108(B8):2370. https://doi.org/10.1029/2002JB002143
Gross R, Beutler G, Plag H (2009) Integrated scientific and societal user requirements and functional specifications for the GGOS. In: Global geodetic observing system. Springer, Berlin. https://doi.org/10.1007/978-3-642-02687-4_7
Hefty J, Rothacher M, Springer T, Weber R, Beutler G (2000) Analysis of the first year of Earth rotation parameters with a sub-daily resolution gained at the CODE processing center of the IGS. J Geod 74(6):479–487. https://doi.org/10.1007/s001900000108
Hekimoglu, S, and Koch, K (1999) How can reliability of robust methods be measured? In: Altan, Gruending (eds) 3rd Turkish-German joint geodetic days. Towards a digital age, vol 1. Istanbul Technical University, Istanbul, pp 179–196
Koch, K (1999) Parameter estimation and hypothesis testing in linear models. Springer, Berlin. https://doi.org/10.1007/978-3-662-03976-2
Kouba J (2008) A simplified yaw-attitude model for eclipsing GPS satellites. GPS Solut 13(1):1–12. https://doi.org/10.1007/s10291-008-0092-1
Liu J, Ge M (2003) PANDA software and its preliminary result of positioning and orbit determination. Wuhan Univ J Nat Sci 8:603–609. https://doi.org/10.1007/BF02899825
Lou Y, Dai X, Gong X, Li C, Qing Y, Liu Y, Peng Y, Gu S (2022) A review of real-time multi-GNSS precise orbit determination based on the filter method. Satell Navig 3(1):15. https://doi.org/10.1186/s43020-022-00075-1
Lutz S, Meindl M, Steigenberger P, Beutler G, Sośnica K, Schaer S, Dach R, Arnold D, Thaller D, Jaggi A (2016) Impact of the arc length on GNSS analysis results. J Geod 90(4):365–378. https://doi.org/10.1007/s00190-015-0878-1
Lyard F, Allain D, Cancet M, Carrère L, Picot N (2021) FES2014 global ocean tide atlas: design and performance. Ocean Sci 17(3):615–649. https://doi.org/10.5194/os-17-615-2021
Mathews P, Bretagnon P (2003) Polar motions equivalent to high frequency nutations for a nonrigid Earth with anelastic mantle. Astron Astrophys 400(3):1113–1128. https://doi.org/10.1051/0004-6361:20021795
Mathews P, Herring T, Buffett B (2002) Modeling of nutation and precession: new nutation series for nonrigid Earth and insights into the Earth's interior. J Geophys Res Solid Earth. https://doi.org/10.1029/2001JB000390
Peng Y, Lou Y, Dai X, Guo J, Shi C (2022) Impact of radiation pressure models on earth rotation parameters derived from BDS. GPS Solut 26(4):126. https://doi.org/10.1007/s10291-022-01316-1
Ray J (2008) Analysis effects in IGS polar motion estimates. http://acc.igs.org/erp-index.html. Accessed 21 Mar 2023
Ray R, Steinberg D, Chao B, Cartwright D (1994) Diurnal and semidiurnal variations in the Earth’s rotation rate induced by oceanic tides. Science 264(5160):830–832. https://doi.org/10.1126/science.264.5160.830
Rebischung P, Schmid R (2016) IGS14/igs14.atx: a new framework for the IGS products. American Geophysical Union Fall Meeting 2016 San Francisco. https://mediatum.ub.tum.de/doc/1341338/file.pdf
Rodriguez-Solano C, Hugentobler U, Steigenberger P (2012a) Adjustable box-wing model for solar radiation pressure impacting GPS satellites. Adv Space Res 49(7):1113–1128. https://doi.org/10.1016/j.asr.2012.01.016
Rodriguez-Solano C, Hugentobler U, Steigenberger P, Lutz S (2012b) Impact of Earth radiation pressure on GPS position estimates. J Geod 86(5):309–317. https://doi.org/10.1007/s00190-011-0517-4
Rothacher M, Beutler G, Weber R, Hefty J (2001) High-frequency variations in Earth rotation from Global Positioning System data. J Geophys Res Solid Earth 106(B7):13711–13738. https://doi.org/10.1029/2000JB900393
Saastamoinen J (1972) Contribution to the theory of atmospheric refraction. B Geod 105(1):279–298. https://doi.org/10.1007/BF02521844
Sibois A (2011) GPS-based sub-hourly polar motion estimates: strategies and applications. PhD thesis, University of Colorado, Boulder. https://scholar.colorado.edu/downloads/pk02c9902
Sibois A (2019) Analysis of high-frequency EOP (HFEOP) models and their impact on GPS data processing. IGS ACC Workshop, April 2019, Potsdam. https://s3-ap-southeast-2.amazonaws.com/igs-acc-web/igs-acc-website/workshop2019/Sibois_IgsAcWorkshop_2019.pdf
Sibois A, Desai S, Bertiger W, Haines B (2017) Analysis of decadelong time series of GPS-based polar motion estimates at 15-min temporal resolution. J Geod 91(8):965–983. https://doi.org/10.1007/s00190-017-1001-6
Teunissen P (2000) Testing theory an introduction. Delft University Press Delft, 156p. ISBN 978–9040719752
Thaller D, Krügel M, Rothacher M, Tesmer V, Schmid R, Angermann D (2007) Combined Earth orientation parameters based on homogeneous and continuous VLBI and GPS data. J Geod 81(6–8):529–541. https://doi.org/10.1007/s00190-006-0115-z
Zajdel R, Sośnica K, Bury G, Dach R, Prange L (2020) System-specific systematic errors in earth rotation parameters derived from GPS, GLONASS, and Galileo. GPS Solut. https://doi.org/10.1007/s10291-020-00989-w
Zajdel R, Sośnica K, Bury G, Dach R, Prange L, Kazmierski K (2021) Sub-daily polar motion from GPS, GLONASS, and Galileo. J Geod 95(1):3. https://doi.org/10.1007/s00190-020-01453-w
Acknowledgements
Thanks for the data support of IGS and IERS. This study is supported by the National Natural Science Foundation of China (41931075, 42374033) and the Key Research and Development Program of Hubei Province (No. 2022BAA054). The numerical calculations in this paper have been done on the supercomputing system in the Supercomputing Center of Wuhan University. Finally, we thank Prof. Aleksander Brzeziński and the anonymous reviewers for the thorough review and constructive comments that improved quality.
Author information
Authors and Affiliations
Contributions
YP and XD wrote the main manuscript text. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Peng, Y., Lou, Y., Dai, X. et al. Analysis of sub-daily polar motion derived from GPS with different temporal resolutions. GPS Solut 28, 33 (2024). https://doi.org/10.1007/s10291-023-01573-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10291-023-01573-8