
Abstract
The BeiDou Navigation Satellite System (BDS) is experiencing a transition from regional (BDS-2) to global (BDS-3) service capability, and both BDS-2 and BDS-3 jointly provide primary navigation services. Using approximately 5-years of ephemerides since January 2016 from the International Global Navigation Satellite Systems (GNSS) Service (IGS) and precise products from Wuhan University (WHU), we provide an assessment of signal-in-space (SIS) errors (SISE) for both BDS-2 and BDS-3 broadcast ephemerides. Due to the new inter-satellite links (ISLs) adopted by the BDS-3 satellites, the percentages of ages of data, ephemeris (AODEs) and ages of data, clock (AODCs) shorter than one hour are 96.48% and 95.78%, respectively, compared to 72.16% and 79.25% of BDS-2. The broadcast orbit performance is also improved by the ISLs. The 3D root mean square errors (RMSEs) of the geosynchronous earth orbit (GEO) broadcast orbits are 6.89 m and 2.45 m for BDS-2 and BDS-3, respectively, while they are 2.04 m and 0.75 m for the inclined geosynchronous orbit (IGSO) and 1.99 m and 0.47 m for the medium earth orbit (MEO). It is found in this contribution that the orientations implied in the BDS-2 and BDS-3 orbital realizations of the terrestrial reference frame are more scattered than those of other navigation systems (i.e., GPS, GLONASS and Galileo). The non-radial orbit errors of BDS-3 (BDS-2) could be improved by approximately 0.2 m (0.1 m) when the estimates of the rotation parameters were considered. It is discovered that a linear pattern in the satellite laser ranging (SLR) residuals is characterized by BDS broadcast orbits, and orbit models might need to be improved. In terms of the broadcast clock error, the averages of the standard deviations (SD) are 0.4 m and 0.2 m for BDS-2 and BDS-3, respectively. However, significant satellite-dependent nonzero clock bias is also observed for the BDS-3 satellites, and this bias could be partly reduced using the differential code bias (DCB) product. The change of correlation between orbit radial component and clock errors from − 0.30 to 0.31 is found for BDS-2 GEO satellites when the reference point of ephemerides was switched from antenna to center of mass. Meanwhile, the reference point switch induces a change of correlation between along-track and clock components from positive to negative for BDS-2 IGSO and MEO. Compared to the moderate correlation of 0.13\(-\)0.41 between orbit radial component and clock errors of GEO or IGSO, both BDS-2 and -3 MEO satellites show the least averaging correlations of no more than 0.1. The global average user range error (URE) of BDS-3 (BDS-2) is approximately 0.6 m (1.0 m), which is dominated by satellite-dependent clock bias. When these biases are removed from the clock residuals, the URE can be reduced by 50% and 15% for BDS-3 and BDS-2, respectively.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
The ephemerides of global navigation satellite systems (GNSS) broadcast to users are usually taken as known quantities in the application of real-time positioning, navigation and timing (PNT). However, the existing signal-in-space (SIS) error (SISE), including the satellite position and clock errors, will be partly distributed into positioning and timing results. To provide an optimal standard positioning service (SPS), it is of primary important to reduce the SISE for GNSS operators. Moreover, the statistical characterization of the SISE is important for advanced receiver autonomous integrity monitoring (ARAIM) to determine the integrity risk (Choi et al. 2011; Rippl et al. 2014). The SISE is generally mapped in the line-of-sight direction and represented by the SIS user range error (URE). To assess the influence of broadcast ephemerides for a user located on the earth, the instantaneous URE (IURE), global average URE and worst-case URE are generally taken as metrics (Montenbruck et al. 2014, 2018).
China has been independently developing the BeiDou Navigation Satellite System (BDS) following a three-phase schedule since 1994. The first and second generations of the BDS (i.e., BDS-1 or BeiDou-1 and BDS-2 or BeiDou-2) were completed in 2000 and 2012 for system demonstration and regional service purposes, respectively. The third generation of the BDS (i.e., BDS-3 or BeiDou-3) has been providing global service since December 27, 2018, and has completed its constellation with the launch of the last GEO satellite on June 23, 2020. The BDS-3 constellation consists of three GEO, three IGSO and twenty-four MEO satellites (Yang et al. 2018; CSNO 2019). To improve the service performance of the BDS, it is important to monitor and assess its status and performance (Yang et al. 2020).
In terms of the SISE for the BDS, Chen et al. (2013) assessed the broadcast ephemerides of BDS-2 satellites (i.e., 5 GEO+5 IGSO+4 MEO satellites) by comparing them to the precision orbits obtained from Wuhan University (WHU). The orbit-only UREs were 1.5, 1.0 and 0.5 m for the GEO, IGSO and MEO satellites, respectively. Using long-term ephemerides from 2013 to 2016 and the corresponding post-processed precise products from WHU, Wu et al. (2017) demonstrated that the SIS UREs were 2.1, 1.5 and 1.4 m for the GEO, IGSO and MEO satellites, respectively, of BDS-2. The significant decrease in the orbit-only URE (i.e., 1.0, 0.7 and 0.6 m, respectively) indicated that the clock errors dominated the SIS URE budget of BDS-2 (Wu et al. 2017). In addition to the limited ground station tracking observations for BDS-2 orbit determination and prediction, the implementation of Ka-band inter-satellite links (ISLs) for BDS-3 satellites would improve the accuracy of orbit estimation (Yang et al. 2017; Xie et al. 2019). Based on 55 days of broadcast message data, Lv et al. (2020) presented a promising performance of the SISE for the BDS-3 MEO satellites, and an orbit-only URE of 0.1 m and an orbit-clock hybrid URE of 0.5 m were obtained. Using 6 months of data from 2019, orbit and clock uncertainties of 0.5 m and 1.82 ns were retrieved for 18 BDS-3 MEO satellites, compared to 2.0 m and 2.91 ns for the BDS-2 broadcast orbit and clock, respectively (Shi et al. 2020). A significant improvement in the positioning service with the additional satellites of the BDS-3 preliminary system was also validated in that study (Shi et al. 2020).
Long historical navigation data of BDS-2 are collected, and an evolutionary BDS-3 with a hybrid constellation is in full operation. A comprehensive evaluation and comparison of the SISE between BDS-2 and BDS-3 are needed, and it is of great value to address the evolution from BDS-2 to BDS-3. First, 5 years of broadcast message data, including all available satellites of BDS-2 and BDS-3, are obtained. Precise satellite orbit and clock products, as well as satellite laser ranging (SLR) data, are also collected for comparison and validation. Second, the methodology used for the SISEs of the broadcast ephemerides is described. Third, the statistical characterizations of BDS-2 and BDS-3 are compared and discussed with a focus on the evolution of the BDS. Finally, a summary and conclusions are given.
Data source
To assess the accuracy and characterization of the BDS broadcast ephemerides, daily merged basic navigation data from the global stations of the IGS tracking network are used in this study. The files of the navigation ephemerides from January 2016 to October 2020 were downloaded from the two FTP servers of the Institut Géographique National (IGN, ftp://igs.ign.fr) and WHU (ftp://igs.gnsswhu.cn).
AODE and AODC
The age of data, ephemeris (AODE) for navigation messages, indicates the time lag between the reference epoch of the predicted ephemerides and the last observations used for orbit determination. Similar to the broadcast orbit, the time lag for the broadcast clock is described by the age of data, clock (AODC). Table 1 lists the percentages of ephemerides with different AODEs and AODCs for the collected ephemerides. For the BDS-2 GEO satellites, the percentages of navigation messages with AODEs and AODCs of less than one hour are 99.33% and 99.93%, respectively, and they are 99.62% and 99.94% for the BDS-3 GEO satellites. The high percentages could be attributed to the frequent update of the ephemerides considering that the GEO satellites can always be tracked by domestic stations.
The BDS-2 IGSO satellites, which have a high inclination of 55°, are tracked discontinuously by domestic monitoring stations. The percentages of the navigation messages with AODEs and AODCs shorter than one hour are less than those of the GEO satellites, and the percentages of AODEs and AODCs shorter than one hour are 74.62% and 83.55%, respectively. Since the IGSO satellites are constrained to the areas above the Asia-Pacific region and come into sight of ground tracking stations frequently, the percentages of AODEs and AODCs of less than six hours can reach 98.83% and 99.52%, respectively. For the BDS-2 MEO satellites, the tracking situation by the ground stations is more serious than that of the IGSO satellites, and the percentages of AODEs and AODCs shorter than one hour are 20.94% and 35.43%, respectively. Compared to BDS-2, the reason for larger percentages of BDS-3 IGSO and MEO ephemerides with AODEs and AODCs of less than one hour is mainly due to the inter-satellite links (ISLs) adopted by these satellites. The corresponding percentages of AODE and AODC are 96.13% and 94.29% for BDS-3 IGSO, respectively. Moreover, 96.42% and 95.77% can also be achieved for the corresponding AODEs and AODCs, respectively, for the BDS-3 MEO satellites.
Precise products
The IGS initiated the workgroup of the multi-GNSS experiment (MGEX) in mid-2011 to support high-precision applications using all available GNSS signals (Montenbruck 2017). Currently, there are seven centers contributing multi-GNSS products to MGEX: the Center for Orbit Determination in Europe (CODE), Centre National d’Etudes Spatiales/Collecte Localization Satellites (CNES/CLS), GeoForschungsZentrum (GFZ), Japan Aerospace Exploration Agency (JAXA), Shanghai Astronomical Observatory (SHAO), Technische Universität München (TUM), and Wuhan University (WHU). Since the MGEX precise products do not include satellites after C37 of BDS-3 until the middle of 2020 provided by WHU, they are collected only for the BDS-2 broadcast orbit and clock comparison. The precise orbit and clock of all the BDS-3 satellites are determined using both the Ka-band ISLs and L-band observations, which were described by Xie et al. (2019).
SISE computation
Considering the differences between the precise and broadcast ephemerides in terms of the coordinates and time reference frames, reference points of the satellite position and clock, and time group delay (TGD), the specific treatment for the assessment of BDS statistical characterization is described in this section.
Reference frame and time system difference
Precise satellite orbits are always generated based on the International Terrestrial Reference Frame (ITRF). For the BDS-2 broadcast ephemerides, the China Geodetic Coordinate System 2000 (CGCS2000) is adopted initially, which is consistent with the ITRF (CSNO 2016). To facilitate interoperability with other GNSSs, the BeiDou coordinate system (BDCS) is realized by the simultaneous integrated adjustment of measurements from BDS tracking stations and ITRF stations (Guo, 2019). Since the inconsistency between the BDCS and ITRF is guaranteed to be no more than 4.0 cm, this reference frame difference is always ignored in the assessment of broadcast ephemerides (Guo et al. 2019).
The BeiDou system time (BDT) is maintained for the BDS, which is a continuous system time without leap seconds and adopts the International System of Units (SI) second as the basic unit (CSNO 2019). For the precise products, the time system of the satellite orbit and clock is referred to GPS time (GPST). Considering that BDT counts in BeiDou weeks and seconds starting on January 1, 2006, the time bias of 14 s between BDT and GPST should be considered for satellite position comparison. Since the velocity of satellites orbiting the earth is less than 4.0 km/s, the small bias at the nanosecond level induced by different realizations of GPST and BDT could be ignored for orbit comparison.
PCO correction
Generally, satellite positions derived from broadcast ephemerides and precise orbit products refer to the antenna phase center (APC) and center of mass (CoM), respectively. To assess the accuracy of broadcast satellite position, the phase center offset (PCO) from http://www.beidou.gov.cn is used to transform the broadcast position from the APC to the CoM by the following formula:
where \({\boldsymbol{r}}_{\mathrm{b}\mathrm{r}\mathrm{d},\mathrm{c}\mathrm{o}\mathrm{m}}^{s}\) and \({\boldsymbol{r}}_{\mathrm{b}\mathrm{r}\mathrm{d},\mathrm{a}\mathrm{p}\mathrm{c}}^{s}\) are broadcast positions based on the CoM and APC, respectively. \({\boldsymbol{A}}^{s}\) represents the transformation matrix from a satellite body fixed to an Earth-fixed coordinate system. \({\boldsymbol{p}}_{\mathrm{b}\mathrm{r}\mathrm{d},3}^{s}\) is the phase center position of the B3 signal, which is the reference signal for the broadcast position.
Figure 1 illustrates the radial errors in the broadcast ephemerides without PCO correction. A switch of the reference point for broadcast orbit from the CoM to APC is observed on January 7, 2017, resulting in the test period of the data being divided into two parts.

BDS-2 broadcast orbit errors of the radial component without PCO correction. The dashed line denotes January 7, 2017, and since then, the reference point of the broadcast orbit has switched from the CoM to the APC
The PCO difference induced by different frequencies should also be compensated for during clock comparison.
where \({p}_{\mathrm{b}\mathrm{r}\mathrm{d},3,z}^{s}\) is the Z-component PCO for the B3 signal and \({p}_{\mathrm{r}\mathrm{e}\mathrm{f},i,z}^{s}\) and \({p}_{\mathrm{r}\mathrm{e}\mathrm{f},j,z}^{s}\) are the PCOs of signals with frequencies i and j adopted in precise orbit and clock estimation.
TGD
For the BDS, the hardware time delay of the B3 signal is included in the broadcast clock, and the TGD for the B1 and B2 signals is given in the navigation information. Considering that the BDS broadcast and precise satellite clocks refer to different signals, the frequency-dependent hardware delay should be corrected as follows:
where \({\Delta }_{\mathrm{t}\mathrm{g}\mathrm{d},ij},(ij=\mathrm{12,13})\) represents the inter-frequency bias. TGD1 and TGD2 are the time delay corrections from B3I to B1I and from B2I to B1I, respectively. A high-precision differential code bias (DCB) is available from the Chinese Academy of Science (CAS), which is also used for broadcast clock comparison in this contribution (Wang et al. 2016).
The broadcast clock with the correction of the inter-frequency bias and PCO is computed as follows:
where \({\tau }_{\mathrm{b}\mathrm{r}\mathrm{d},3}^{s}\) and \({\tau }_{\mathrm{b}\mathrm{r}\mathrm{d},ij}^{s}\) are the broadcast satellite clock and corrected clock of frequencies i and j, respectively. Since different timescales are used to estimate the broadcast and precise clock, a common bias can be found between \({\tau }_{\mathrm{b}\mathrm{r}\mathrm{d},ij}^{s}\) and precise clock for all satellites at any epoch. Because the BDS-3 precise orbit and clock products are generated using additional ISLs, the common timescale of the BDS-3 clock is not consistent with that of BDS-2. Moreover, a systematic offset between the TGDs of BDS-2 and BDS-3, especially for the frequency B1I, was observed by Wang et al. (2019a, b) and Zhang et al. (2020a, b). As a result, we take the timescale bias from the epoch-wise mean of \({\tau }_{\mathrm{b}\mathrm{r}\mathrm{d},ij}^{s}\) and subtract it from the broadcast clocks for BDS-2 and BDS-3 separately. The broadcast satellite orbit and clock with corrections in (1) and (5) are compared to the precise products hereafter.
SIS URE
Considering that the orbit error could be expressed in the along-track, cross-track and radial directions (i.e., \(\Delta {\boldsymbol{r}}^{s}={\left(\begin{array}{ccc}R& A& C\end{array}\right)}^{T}\)), the instantaneous URE (IURE) can be written as follows (Montenbruck et al. 2018):
where \(\Delta {\tau }^{s}\) is the broadcast clock error. \(\left[\begin{array}{ccc}{e}_{u,r}^{s}& {e}_{u,a}^{s}& {e}_{u,c}^{s}\end{array}\right]\) is the unit vector for the along-track, cross-track and radial components.
The popular global average URE is described as the root sum square of the IURE for an area visible and can be simplified as follows:
and the orbit-only contributed URE can be obtained by:
where \({w}_{r}\) and \({w}_{a,c}\) denote the contribution of the orbit errors of the radial and non-radial components, which are related to the elevation mask. In this study, a cut-off elevation of 5° was used to compute these weighting factors. Values of 0.982 and 0.132 are selected for \({w}_{r}\) and \({w}_{a,c}\) for the BDS MEO satellites, and 0.992 and 0.087 are used to compute the averaged URE for IGSO and GEO satellites, respectively (Hu et al. 2013).
For integrity-related applications, the worst user location (WUL) user range error is often determined by
where \(\Delta {r}_{\mathrm{w}\mathrm{u}\mathrm{l}}^{s}\) denotes the broadcast orbit errors along the line of sight at the worst user location (Montenbruck et al. 2014).
Statistical characterization
In this section, the accuracy and statistical characterization of the SISE are illustrated and analyzed. A sampling interval of 15 min is adopted for the satellite orbit and clock comparison. Due to the failure records and incorrect interpretations in RINEX files and errors in precise products, some outliers in the SISE are inevitable. The orbit and clock residuals greater than 15 m are identified as outliers and excluded from the statistical analyses.
Orbit error
The long-term orbit errors of the broadcast ephemerides are illustrated in Fig. 2. It is expected that the position errors of BDS-3 are less scattered than those of BDS-2, which is attributed to the ISLs used for the orbit determination. It can also be observed that the orbit errors of the along-track component contribute a large part of the total orbit errors for BDS-2. Table 2 lists the statistics of orbit errors, as well as the other GNSSs (i.e., GPS, GLONASS and Galileo) for the test period for comparison. Due to an almost static observation geometry, the BDS-2 GEO satellites present the largest orbit errors, and the along-track, cross-track and radial orbit errors are 6.72, 1.36 and 0.68 m, respectively. Incorporating ISLs, the observation geometry of BDS-3 GEO satellites is enhanced significantly, and the orbit errors decrease to 2.22, 1.00 and 0.30 m for the three components. A similar evolution of orbit precision is also obtained for the BDS-3 IGSO and MEO satellites, and the broadcast position errors achieved a decrease from the meter level to the sub-meter level from BDS-2 to BDS-3 for each component. Especially, the radial orbit errors are better than 0.2 and 0.1 m for the BDS-3 IGSO and MEO satellites, respectively.

Statistical results for BDS orbit errors in the along, cross and radial directions. The boxes in red colors indicate the GEO satellites, those in green colors for the IGSO satellites and blue for the MEO satellites. The box plot is constructed from the 25th, 50th, 75th and 97.5th percentiles
Compared to other GNSSs, the BDS-2 MEO satellites present the largest position errors for the radial component. However, the BDS-3 satellites archive the least error for the radial component among all GNSSs. For the along- and cross-track components of MEO satellites, the orbit residuals of BDS-2 present the second largest root mean square error (RMSE), and the BDS-3 MEO shows only slightly larger errors than Galileo (i.e., 0.35 versus 0.31 m). Overall, the ranking in order by three-dimension (3D) errors of MEO satellites is Galileo, BDS-3, GPS, BDS-2 and GLONASS, and the values are 0.33, 0.48, 0.97, 1.99 and 2.10, respectively.
To have a clear comparison between BDS-2 and BDS-3, Fig. 3 presents broadcast orbit errors of one week in June 2020 for two IGSO satellites (i.e., C06 versus C38) and two MEO satellites (i.e., C11 versus C19). For BDS-2 satellites, all three components exhibit clear once-per-rev periodicity, which is mainly attributed to the limited stations and unmodelled dynamitic errors. Taking advantage of ISLs among BDS-3 satellites, the amplitudes of periodic orbit errors are reduced significantly for C19 and C39, and other BDS-3 satellites not illustrated in Fig. 3. Benefitting from the more frequent update of ephemerides using ISLs, large jitters between adjacent ephemerides of BDS-2 satellites (e.g., C11) are also reduced greattly for BDS-3 satellites.

Orbit errors of IGSO and MEO satellites in June 2020. The red and blue dashes represent IGSO C06 and MEO C11 of BDS-2; green and brown dashes represent MEO C19 and IGSO C38 of BDS-3
The periodic orbit errors for BDS-3, especially for along- and cross-track components, are still observed in Fig. 3. This phenomenon is mainly caused by the uncertainties in the orientation implied in the predicted orbit, which can be validated by the rotation parameters relative to the precise orbit (Fig. 4). Although the rotations consist of inconsistency between the ITRF and BDCS, as well as the inaccuracy of the prediction, only broadcast ephemerides are accessible to navigation users. The transformation parameters (e.g., rotation) are taken as systematic errors induced by the orbital realization of the BDCS. The BDS rotations show the largest scatter among all the GNSSs, and the standard deviations for both BDS-2 and BDS-3 are larger than 1.0 mas for any one of three components. Table 3 summarizes the differences in RMSE considered in orbit comparison without and with rotation. Compared to other GNSSs, the RMSE of BDS orbit residuals is significantly reduced when rotations are estimated, especially for BDS-3, and the orbit residuals achieve a decrease in 0.14–0.30 m for the along- and cross-track components.

Rotation parameters of the MEO satellite orbits relative to the precise orbits. Different colors are used to distinguish the rotation variations and averages, as well as the standard deviations of the individual components
SLR validation
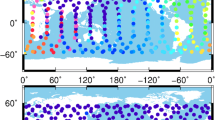
SLR observations are collected from the international laser ranging service (ILRS) for BDS-2 and BDS-3 satellites (Pearlman et al. 2002). The SLR residuals of BDS-2 satellite broadcast orbits are much scattered than the results of BDS-3, and the standard deviation (SD) of BDS-2 satellites ranges from 0.6 to 0.8 m (Fig. 5). A significant improvement is found for BDS-3 satellites, and the corresponding SDs of 0.1 m are achieved. However, small positive biases are also observed for the two China Academy of Space Technology (CAST) satellites (i.e., 6.0 and 9.0 cm for C20 and C21, respectively), which may be related to the unmodelled errors in the prediction of broadcast satellite position.

SLR residuals over time for BDS satellites. The average and SD of residuals are also presented
Figure 6 illustrates the SLR residuals as a function of the satellite elongation angle with respect to the position of the sun for individual satellites (i.e., the sun-satellite-earth angle). There are different characterizations between the BDS-3 satellites manufactured by the Shanghai Engineering Center for Microsatellites (SECM) and CAST. The SLR residuals of the BDS-3 SECM satellites (i.e., C29 and C30) increase when the elongation angle increases from 0 to 180°, whereas BDS-3 CAST satellites (i.e., C20 and C21) exhibit opposite patterns in the SLR residuals. Moreover, the SLR residuals of the BDS-2 satellites present similar patterns to those of the SECM satellites. The elongation angle-dependent residuals again indicate that systematic modeling errors in the predicted orbit should be reduced. For example, an empirical a priori model was proposed for the precise orbit determination (POD) of the BDS-2 GEO satellites to compensate for the accelerations induced by the communication antenna, and the systematic effects on SLR residuals were eliminated (Wang et al. 2019a, b).

SLR residuals variation as a function of satellite elongation angle. Please note different y-axes for the BDS-2 satellites (i.e., C01, C08, C10, C11 and C13) and BDS-3 satellites (i.e., C20, C21, C29 and C30)
Clock errors
Figure 7 presents the statistical results of the BDS broadcast clock corrected by the TGD and DCB products. Considering that there were no DCB products for BDS-3 GEO satellites (i.e., C59 and C60), the corresponding clock errors are not shown in the figure. In terms of TGD correction, 95% of clock residuals have an average range of 1.1 m for all BDS-3 satellites, which is much smaller than the corresponding value of 3.1 m from BDS-2. Although the inconsistency caused by different PCOs and frequencies between broadcast and precise clocks is corrected, there are still satellite-dependent clock biases, especially for BDS-3 satellites. When DCB products are used to align broadcast clocks to precise clock, the biases of clock residuals are reduced significantly for most BDS-3 satellites.

Statistics of the BDS broadcast clock corrected by the TGD (top) and DCB (bottom) products. Due to lack of DCB information, no statistics shown in bottom subplot for C59 and C60. The boxes in red colors indicate the GEO satellites, those in green colors for the IGSO and blue for the MEO satellites. The box plot is constructed from the 25th, 50th, 75th and 97.5th percentiles
Figures 8 and 9 present the monthly statistics of clock residuals with TGD correction for the BDS-2 and BDS-3 satellites, respectively. Systematic biases as large as 3 m existed for the BDS-2 satellites before July 2017, and the biases had decreased significantly since then, which could be explained by the upgrade of the BDS-2 TGD (Wang et al. 2019a, b). Some apparent decreases are also validated in the SDs of the BDS-2 clock residuals since July 2017, and the mean SD changes from 0.6 to 0.4 m. For the BDS-3 satellites, the monthly clock biases are within 1.5 m and very stable for most satellites. Due to high clock stability and short update intervals, a mean SD of 0.2 m is obtained for the BDS-3 broadcast clock.

Monthly averages of clock bias and SD for BDS-2 satellites

Monthly averages of clock bias and SD for BDS-3 satellites
Correlation between orbit and clock
A positive correlation between radial orbit and clock error is assumed in (7) when the signal in space URE is computed based on orbit and clock errors. Figure 10 depicts the relationship between radial and clock errors for BDS-2 satellites. There is an obvious change from a negative correlation to a positive for GEO on January 7, 2017, which is the epoch of switching from the CoM to the APC. To assess the impacts of changes in the reference point on the correlation among the orbit components and clock error, we divide the correlation coefficients into two parts taking the epoch of the reference point switch as the splitter.

Daily correlation coefficients between the radial component and clock errors for BDS-2. The black dashed line represents the switch in the broadcast reference point from CoM to APC
Correlation coefficients for every possible pair of orbit components (i.e., R, A and C) and clock error (i.e., dT) are illustrated in Fig. 11 for individual BDS-2 satellites. Table 4 summarizes the average cross-correlation for the GEO, IGSO and MEO satellites. For the GEO satellites, the switch of the reference point mainly affects the correlation between R and dT and has effect of no more than 0.1 on the A–C, A–R and A-dT pairs. However, obvious changes in the correlations for C-R and C-dT were also observed, and the averages decreased from − 0.19 to − 0.05 and from 0.15 to 0.02, respectively. Moreover, the correlation coefficients of C–R were characterized by a heavy-tailed distribution when the reference point was switched to APC. For the IGSO and MEO satellites, although the correlations among different error components are less than 0.2, a change to be positive from negative correlation is found for A–C, A–R and A–dT, and an opposite change for C–R and C–dT is also observed. In contrast to GEO, the reference point switch does not have significant impacts on the R–dT correlation for BDS-2 IGSO and MEO satellites.

Distribution of the daily correlation coefficients among the orbit and clock errors for the reference points of the BDS-2 satellites are the CoM (top) and APC (bottom). The white dots denote the medians, and the black lines denote the range of 25th and 75th percentiles
Figure 12 presents the correlations among orbit and clock errors for BDS-3 satellites. Considering the period of broadcast orbit referring to APC for both BDS-2 and BDS-3, the correlation between R and dT of GEO satellites is the most obvious (i.e., 0.31 and 0.41, please see Table 4), which may be related to the relative stationary observation geometry. Moreover, the MEO satellites show the smallest correlations, and the averages are − 0.01 and 0.06 for BDS-2 and BDS-3, respectively. For the IGSO satellites, the averages are much larger than MEO, and the corresponding values are 0.13 and 0.32 for BDS-2 and BDS-3, respectively. A negative correlation between R and A is also perceptible for most satellites, which may be related to the inverse proportion between orbital velocity and \(\sqrt{R}\) according to Kepler’s law. For correlations between components A and C, the BDS-3 GEO satellites show an opposite heavy-tailed distribution compared to BDS-2, and the average correlation values are 0.27 and − 0.13, respectively. For correlations of other pairs, no obvious correlations are found for either BDS-2 or BDS-3 satellites.

Distribution of the daily correlation coefficients among the orbit and clock errors for the BDS-3 satellites. The white dots denote the medians, and the black lines denote the range of 25th and 75th percentiles
SIS URE
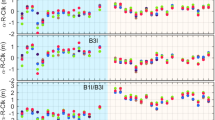
According to (7–9), the signal-in-space (SIS) UREs of BDS are obtained and presented in Fig. 13 for the BDS-2 and BDS-3 satellites, and the averages of different UREs are summarized in Table 5. The URE(orb), URE(wul) and URE(95%) denote the orbit-only SISE, the SISE at the worst user location, and the 95th percentile of URE series, respectively. Considering that the clock bias could not be eliminated by precise DCB products, the statistical results with clock residuals averaging out are also given in Table 5, which can be taken as the upper bounds of achievable UREs.

Monthly averages of the SISEs for BDS-2 and BDS-3 using TGD correction. URE denotes the global average SISE of the orbit and clock, URE(orb) denotes the orbit-only SISE, URE(wul) stands for the SISE at the worst user location, and URE(95%) stands for the 95th percentile of the UREs
An update of the TGD completed in 2017 is also validated from Fig. 13, and the UREs of BDS-2 decreased since late July 2017. Due to the decrease in the clock bias for C06 (see Fig. 8), an improvement is observed for the average URE of the IGSO satellites since September 2018. Overall, the URE averages are 1.21, 0.84 and 1.02 m for the GEO, IGSO and MEO satellites of BDS-2, respectively. The orbit-only UREs are approximately 0.3 m smaller than the UREs of the orbit and clock combinations, and the values are 0.87, 0.64 and 0.64 m for the corresponding categories. Considering the larger orbit error than those of the IGSO and MEO satellites, the worst user location URE of the BDS-2 GEO satellites is 0.66 m larger than the URE, while it is 0.3 m larger than the URE for the BDS-2 IGSO and MEO satellites. Amplified by the clock error, the URE(95%) of 1.52 and 1.90 m are 0.3–0.5 m larger than the URE(wul) for BDS-2 IGSO and MEO, respectively. However, the URE(95%) of GEO is almost the same as URE(wul), which is attributed to the high correlation between the radial component of the orbit and the clock error.
Compared to BDS-2, the URE achieves significant improvement for BDS-3 satellites equipped with ISLs and higher stability satellite clocks. The orbit-only UREs are 0.37, 0.17 and 0.09 m, and when clock error is taken into account, the UREs are 0.75, 0.59 and 0.52 m for the BDS-3 GEO, IGSO and MEO satellites, respectively. The satellite-dependent bias in clock residuals dominates the URE budget, and the UREs are reduced to 0.41, 0.26 and 0.24 m when the biases are subtracted from the clock errors.
Summary and conclusions
In this contribution, the broadcast orbit and clock of both the BDS-2 and BDS-3 satellites are compared to post-processed precise products. Nearly 5-years of broadcast ephemerides are collected and pre-processed before computing the SISE. The characteristics of the SISE are compared between BDS-2 and BDS-3 with emphasis on the evolution of the BDS.
Thanks to ISLs applied in BDS-3 satellites, broadcast ephemerides could be updated more frequently than BDS-2, especially MEO satellites. Overall, the percentage of BDS-3 ephemerides with AODE less than one hour is increased to 96.48%, compared to the percentage of 72.16% for BDS-2. Shorter update intervals than BDS-2 are also validated for the BDS-3 broadcast clock, and the percentages of AODC shorter than one hour are 79.25% and 95.78% for BDS-2 and BDS-3, respectively.
Compared to BDS-2, the performance of broadcast orbit errors is improved significantly for BDS-3 satellites. For MEO, precisions of 0.35, 0.31 and 0.08 m are achieved for along-track, cross-track and radial components, respectively, and improvements of 80.33%, 53.73% and 85.71% are obtained, respectively. For the GEO and IGSO satellites, improvements of 20–70% are also attained for the three components. From the analysis of the rotation parameters between the broadcast and precise orbits, the most scattered rotation parameters are observed for both BDS-2 and BDS-3, which should be ascribed to the uncertainty in the orientation implied in the broadcast ephemerides. Considering the estimates of the rotation parameters, an improvement of 0.2 m can be obtained for the along- and cross-track components. The SD of the SLR residuals with the BDS-3 broadcast orbit is less than 0.2 m, while these values are 0.6–0.8 m for the BDS-2 satellites. However, a linear pattern in the satellite elongation dependence is found for the SLR residuals of both the BDS-2 and BDS-3 satellites, which means that the orbit models still have the potential to enhance the further improvement of BDS broadcast orbits.
The satellite-dependent clock bias is reduced due to the update of the BDS-2 TGD, and the SD is at the level of 0.50 m. The performance of the BDS-3 broadcast clock is optimized by the ISL, and the SD of 0.24 m is only half that of the BDS-2 satellites. However, the satellite-dependent bias is still obvious even with DCB product correction, which may be related to the different signal tracking modes of the monitoring receivers compared with general use receivers (Zhang et al. 2020a, b), as well as precise clock generating strategies. UREs of 0.8–1.2 m and 0.5–0.8 m are achieved for the BDS-2 and BDS-3 satellites, respectively, which are dominated by clock errors with satellite-dependent bias. When the bias is averaged out from the URE, the corrected UREs will reach levels of 0.9 and 0.3 m for the BDS-2 and BDS-3 MEO satellites, respectively.
The correlation between the radial component of the orbit error and clock error is not significant in the collected ephemerides for either the BDS-2 or BDS-3 MEO satellites. However, a moderate correlation, approximately 0.3–0.4, between the radial component of the orbit and clock error is found for both the BDS-2 and BDS-3 GEO satellites, and correlations of 0.13 and 0.32 are also observed for the IGSO satellites. The switch from CoM to APC of the reference point could introduce a positive correlation for the radial component and clock errors of the BDS-2 GEO satellites, which should be taken into account in the computation of the global average URE. Moreover, both the BDS-2 and BDS-3 satellites show visible negative correlations between along-track and radial errors.
To reduce the systematic errors in the SLR residuals, further research is needed to improve the dynamic model of orbit prediction. Moreover, it is important to assess the impact of orientation uncertainty on the SPS and enhance the stability of orientation implied in broadcast orbits.
Data availability
The merged MGEX ephemerides data, as well as the post-process products are openly available by an anonymous user via ftp://igs.ign.fr or ftp://igs.gnsswhu.cn. The phase center offset (PCO) information can be obtained from http://www.beidou.gov.cn.
References
CSNO (2016) BeiDou navigation satellite system signal in space interface control document open service signal (version 2.1)
Chen L, Jiao W, Huang X, Geng C, Ai L, Lu L, Hu Z (2013) Study on signal-in-space errors calculation method and statistical characterization of BeiDou navigation satellite system. In: Proceedings of China satellite navigation conference (CSNC) Lecture notes in electrical engineering 243, Springer, Berlin, pp 423–434. https://doi.org/10.1007/978-3-642-37398-5_39
Choi M, Blanch J, Akos D, Heng L, Gao G, Walter T, Enge P (2011) Demonstrations of multi-constellation advanced RAIM for vertical guidance using GPS and GLONASS signals. Proc. ION GNSS 2011, Institute of Navigation, Portland, Oregon, USA, September 20–23, 3227–3234
CSNO (2019) BeiDou navigation satellite system signal in space interface control document open service signal B1I (Version 3.0). http://www.beidou.gov.cn/xt/gfxz/201902/P020190227593621142475.pdf
Guo S et al (2019) BDS-3 RNSS technical characteristics and service performance. Acta Geodaetica Et Cartographica Sinica 48(7):810–821. https://doi.org/10.11947/j.AGCS.2019.20190091 ((in Chinese))
Hu Z, Chen G, Zhang Q, Guo J, Su X, Li X, Zhao Q, Liu J (2013) An initial evaluation about BDS navigation message accuracy. In: Proceedings of China satellite navigation conference (CSNC) 2013. Lecture notes in electrical engineering 243, Springer, Berlin, pp 479–491.https://doi.org/10.1007/978-3-642-37398-5_44
Lv Y, Geng T, Zhao Q, Xie X, Zhou R (2020) Initial assessment of BDS-3 preliminary system signal-in-space range error. GPS Solut 24:16. https://doi.org/10.1007/s10291-019-0928-x
Montenbruck O, Steigenberger P, Hauschild A (2014) Broadcast versus precise ephemerides: a multi-GNSS perspective. GPS Solut 19:321–333. https://doi.org/10.1007/s10291-104-0390-8
Montenbruck O et al (2017) The multi-GNSS experiment (MGEX) of the international GNSS service (IGS)—achievements, prospects and challenges. Adv Space Res 59:1671–1697
Montenbruck O, Steigenberger P, Hauschild A (2018) Multi-GNSS signal-in-space range error assessment-methodology and results. Adv Space Res 61:3020–3038
Pearlman MR, Degnan JJ, Bosworth JM (2002) The international laser ranging service. Adv Space Res 30(2):135–143. https://doi.org/10.1016/S0273-1177(02)00277-6
Rippl M, Martini I, Belabbas B, Meurer M (2014) ARAIM operational performance tested in flight. In: Proc. ION ITM 2014, International Technical Meetings, San Diego, CA, USA, January 27–29, 601–615
Shi J, Ouyang C, Huang Y, Peng W (2020) Assessment of BDS-3 global positioning service: ephemeris, SPP, PPP, RTK, and new signal. GPS Solut 24:81. https://doi.org/10.1007/s10291-020-00995-y
Wang N, Yuan Y, Li Z, Montenbruck O, Tan B (2016) Determination of differential code biases with multi-GNSS observations. J Geod 90:209–228. https://doi.org/10.1007/s00190-15-0867-4
Wang C, Guo J, Zhao Q, Liu J (2019a) Empirically derived model of solar radiation pressure for BeiDou GEO satellites. J Geod 93:791–807. https://doi.org/10.1007/s00190-018-1199-y
Wang N, Li Z, Montenbruck O, Tang C (2019b) Quality assessment of GPS, Galileo and BeiDou-2/3 satellite broadcast group delays. Adv Space Res 64:1764–1779. https://doi.org/10.1016/j.asr.2019.07.029
Wu Y, Liu X, Liu W, Ren W, Lou Y, Dai X, Fang X (2017) Long-term behavior and statistical characterization of BeiDou signal-in-space errors. GPS Solut 21:1907–1922. https://doi.org/10.1007/s10291-017-0663-0
Xie X, Geng T, Zhao Q, Cai H, Zhang F, Wang X, Meng Y (2019) Precise orbit determination for BDS-3 satellites using satellite-ground and inter-satellite link observations. GPS Solut 23:40. https://doi.org/10.1007/s10291-019-0823-5
Yang D, Yang J, Li G, Zhou Y, Tang C (2017) Globalization highlight:orbit determination using BeiDou inter-satellite ranging measurements. GPS Solut 21:1395–1404. https://doi.org/10.1007/s10291-017-0626-5
Yang Y, Xu Y, Li J, Yang C (2018) Progress and performance evaluation of BeiDou global navigation satellite system: Data analysis based on BDS-3 demonstration system. Sci China Earth Sci 61(5):614–624
Yang Y, Mao Y, Sun B (2020) Basic performance and future developments of BeiDou global navigation satellite system. Satell Navig 1:1. https://doi.org/10.1186/s43020-019-0006-0
Zhang Y, Kubo N, Chen J, Chu F, Wang A, Wang J (2020a) Apparent clock and TGD biases between BDS-2 and BDS-3. GPS Solut 24:27. https://doi.org/10.1007/s10291-019-0933-0
Zhang Y, Chen J, Gong X, Chen Q (2020b) The update of BDS-2 TGD and its impacts on positioning. Adv Space Res 65:2645–2661
Acknowledgements
We would like to thank IGS and MGEX for providing multi-GNSS broadcast ephemerides and precise products and ILRS for providing the SLR observations.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Chen, G., Zhou, R., Hu, Z. et al. Statistical characterization of the signal-in-space errors of the BDS: a comparison between BDS-2 and BDS-3. GPS Solut 25, 112 (2021). https://doi.org/10.1007/s10291-021-01150-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10291-021-01150-x