
Abstract
This study provides information about the influence of various ionospheric spatial gradients on the thin layer ionospheric model (TLIM). Particular attention is paid to the errors caused by the slant total electron content (sTEC) when converted to the vertical total electron content (vTEC) by an elevation-dependent mapping function (MF), ignoring the satellite azimuth. We quantify the influence of the spatial gradient on ionospheric mapping using globally distributed GNSS measurements and the NeQuick2 ionospheric electron density model. The ionospheric mapping errors (IME) were confirmed using GNSS measurements that were observed for different solar activity conditions. It was found that the IME in the low latitudes were significantly higher than those at other latitudes, and the high-latitude region IME were more pronounced than those of the mid-latitude regions. A comprehensive simulation analysis based on the NeQuick2 model was conducted for different azimuth angles and geographical locations. It was found that the vTEC converted by the MF is smaller than the real value of vTEC in different spatial directions. The IME in the north-to-south direction were much higher than those in the east-to-west direction and were symmetrical north–south about the geomagnetic equator. The values of the IME had obviously seasonal variation characteristics: The IME in the spring and autumn were significantly higher than those in the winter and summer; however, in the low latitudes, the IME were abnormal and had larger values. There is an interesting phenomenon wherein the IME were symmetrical about the azimuth of 180°, and the value of the IME was less than 1 TECu when the satellite elevation was up to 50°. From the global perspective, when the thin layer height is at 400 km, the IME were relatively minimal. In addition, the modified single-layer model (MSLM) and Ou (Ou J) segmented mapping functions outperformed other mapping functions at low satellite elevations; however, when the elevation angle was increased to approximately 40°, the differences of the different MFs were small.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Ionospheric refraction is one of the major sources of error for GNSS applications and is difficult to completely eliminate due to the complex temporal and spatial variations of the ionosphere, which cause signal propagation delays and advances with respect to the carrier frequency. The total electron content (TEC) is one of the most important quantitative parameters of the earth’s ionosphere and is defined as the curvilinear integral of electron densities along a given path from the receiver to the satellite (Davies and Hartmann 1997; Mannucci et al. 1999). In the recent years, the measurements of the TEC from the Global Navigation Satellite System (GNSS) have gained importance with the increasing demand for a great variety of ionospheric studies, especially in the field of navigation. Dual-frequency and multi-frequency receivers can eliminate the influence of the most of the ionospheric delay errors by combining measurements according to the dispersion properties of the ionosphere (Orús et al. 2002). However, the majority of single-frequency users, who account for the most of the market share, can only correct the error through ionospheric models using the following techniques: two-dimensional ionospheric models, such as the Klobuchar model (Klobuchar 1987; Wang et al. 2016) and the grid ionospheric vertical delay (GIVD) model (Hernández-Pajares et al. 2009), and three-dimensional ionospheric models such as the International Reference Ionospheric (IRI) model (Bilitza and Reinisch 2008) and NeQuick2 model (Nava et al. 2008).
In the field of GNSS positioning, two-dimensional ionospheric models are widely used due to their simplicity and ease of use and share a common assumption that the ionosphere may be horizontally stratified but spatially uniform (Memarzadeh 2009; Schaer 1999). Further, all free electrons of the ionosphere are contained in a layer of infinitesimal thickness at a given reference altitude H. The layer height typically ranges from 350 to 450 km above the earth’s surface (Mannucci et al. 1998; Schaer 1999). Klobuchar (1987) suggested that the thin layer height for the GPS broadcast ionosphere model use 350 km as a basis. However, it is found that single-layer model (SLM) mapping function with a thin layer height of 428.8 km matches the Chapman profile mapping function remarkably well (Schaer 1999). The ionospheric products provided by the IGS ionosphere working group uses a thin layer height of 450 km (Feltens 2003).
The conversion of the sTEC along a given line of sight (LOS) from a GNSS satellite to a GNSS receiver to the vTEC at the ionospheric pierce point (IPP) is usually based on the thin layer approximation of the ionosphere, using a simple mapping function, which generally depends on the satellite elevation angle only. Therefore, it is implicitly assumed that no horizontal gradients of vertical TEC can exist. In contrast, as is the case for the true ionosphere, slant to vertical TEC conversion errors are expected where strong TEC gradients are present (Nava et al. 2007; Wang 2016). Konno et al. (2005) found several instances of ionosphere spatial gradients that were much larger than normal during strong magnetic storms using Japan GEONET data. At the middle latitudes, regions with steeper gradients have been associated with the borders of the main trough of the ionosphere (Vo and Foster 2001). At low latitudes, Keroub (1976) showed that the electron distribution is irregular and that the slopes of the equal density lines are not moderated according to the contour maps, which reveals the presence of tilts in the horizontal gradients. The equatorial anomaly gradient not only extends in the horizontal direction but also with altitude (Dymond and Thomas 2001). Experimentally, the equatorial spread-F bubble events might be associated with strong density gradients at the same latitudes as the equatorial ionization anomaly (Basu et al. 2001).
The ionospheric spatial gradient may have a certain impact on satellite navigation for those satellites using the thin layer ionospheric model (TLIM). The temporal ionospheric gradient caused by high geomagnetic activity has adverse effects on ambiguity resolutions and coordinate solutions, especially in high-latitude regions (Arslan and Demirel 2008). In addition, the ionospheric gradient under extreme conditions is likely to influence the LAAS architecture, particularly for the Category II/III precision approaches and landing systems (Luo et al. 2004). Although the TLIM is greatly handicapped in practice, it is still widely used for a variety of problems (Klobuchar 1987; Liu et al. 2011; Schaer 1999; Liu et al. 2016; Tao and Jan 2016). To minimize the impact of model errors as much as possible, many scholars have made great efforts, including evaluating the effect of the ionospheric layer height (ILH) on TLIM and detecting the optimal ILH in different areas and electromagnetic environments (Birch et al. 2002; Brunini et al. 2011; Nava et al. 2007; Rama Rao et al. 2006), proposing a new mapping function based on a multilayer ionospheric assumption (Hoque and Jakwoski 2013) and the electron density field (Zus et al. 2017), and developing three-dimensional ionospheric models to eliminate the error introduced by TLIM (Bilitza and Reinisch 2008; Nava et al. 2008).
This work revisited this problem and analyzed the influence of the spatial gradient, especially on satellite azimuth and layer height, for ionosphere mapping. For a systematic study of how this effect varies with satellite azimuths, the assessment was done for different times, seasons, receiver locations, and covering periods of low-to-high solar activity, which attempts to represent different typical conditions of the ionosphere. The GPS-derived sTEC obtained using GPS satellite tracked by global 460 ground stations of International GNSS Service (IGS) was first used to check and assess the ionospheric mapping error (IME), using a “coinciding pierce points technique” (Nava et al. 2007). Since the measured data cannot attain sTEC and vTEC at arbitrary satellite elevations and azimuthal angles for a given IPP, it is difficult to systematically study the effect of the spatial gradient of the ionosphere on the TILM. Therefore, a series of simulation studies was done to comprehensively assess the error due to the TLIM using the NeQuik2 model, which allows for the creation of realistic but controlled ionospheric situations for the evaluation of the errors that are produced when the TLIM is used to reproduce those situations. The error assessment was performed for the global region.
Influence of the ionospheric spatial gradient on ionospheric mapping
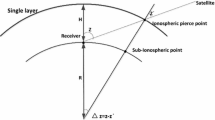
We quantitatively analyzed the influence of the ionospheric spatial gradient on ionospheric mapping using GNSS observables of IGS stations and the coinciding pierce point (CPP) technique (Komjathy et al. 2005; Nava et al. 2007). The CPP technique proposes using the dense GNSS monitoring stations to obtain the ionospheric TEC and is based on the analysis of all pairs of CPP for a given epoch. The sTEC is derived from the GPS dual-frequency pseudorange and carrier phase measurements based on carrier-to-code leveling (CCL) methods (Schaer 1999). In addition, the differential code biases (DCB) products provided by the Center for Orbit Determination in Europe (CODE) (Dach et al. 2009) was adopted to eliminate the GPS satellite DCBs. The receiver DCBs are estimated in conjunction with ionosphere model parameters using the generalized triangular series (GTS) function. As illustrated in Fig. 1, the link defined by the tracking station R1 and the satellite S1 determines the IPP1, having the latitude φ 1 and the longitude λ 1. Correspondingly, the link defined by the tracking station R2 and the satellite S2 determines the IPP2, having the latitude φ 2 and the longitude λ 2. For practical purposes, two pierce points IPP1 and IPP2, if
were considered “coinciding.”

Geometry for the estimate of the mapping function errors
The sTEC1 and sTEC2 are the along given LOS from S1 to R1 and from S2 to R2, respectively, and the vTEC1 and vTEC2 at IPP1 and IPP, are related by:
where Z 1 and Z 2 are the satellite zenith distances at IPP1 and IPP2, respectively (see Fig. 1).
If IPP1 and IPP2 satisfy (1), then vTEC1 and vTEC2 should be two equivalent vertical TECs based on the thin layer approximation for the ionosphere and by definition are equal:
where the meaning of each parameter is the same as in (2).
In reality, vTEC1 and vTEC2 are not exactly equal due to the presence of strong ionospheric electron density gradients. If vTEC1 is different from vTEC2, it can be said that at least one of the two vTECs is affected by an error that, in absolute value form, is defined as follows:
where the meaning of each parameter is the same as in (2).
The CPP technique requires a dense GNSS monitoring network; otherwise, it is difficult to obtain the GPS-derived TEC observations for the coinciding pierce points for a given epoch. To investigate the effects of the electron density gradients on the global ionosphere, the GPS-derived slant TEC data for the period from 2012 to 2014 have been used. As seen from the World Data Center for Geomagnetism, Kyoto (http://wdc.kugi.kyoto-u.ac.jp) Web site, on the chosen days, the geomagnetic condition remained calm, and the Dst index absolute value is less than 20 nT. The slant TEC data were obtained using GPS satellite tracked by 460 ground stations from the International GNSS Service (IGS) on the global scale. For the present study, the sampling interval of the data was set to 30 s, and only the slant TEC data corresponding to the LOS with an elevation greater than 15° at the observation point was used. The geographic location of the coinciding pierce points that provided the data on DOY 300, 2014 are indicated in Fig. 2. Most of the CPP are distributed over land; however, the CPP is relatively small in the northern hemisphere latitudes at 10°–20° and is the most concentrated in Europe, North America, and South America. However, the CPPs are widely distributed and cover different latitudes and longitudes.

Location of CPP for DOY 300, 2014
The experiment was repeated for three different levels of solar activity: low (F10.7 < 90 sfu), mediate (145 < F10.7 < 155 sfu) and high (F10.7 > 190 sfu). The total numbers of selected CPP observations for the lower, mediate, and high days are 121,773, 161,894, and 103,297, respectively. The normalized histograms of the ionospheric mapping errors estimated by (4) are shown in Fig. 3. It shows that the IME is increasing as the solar activity intensifies (Fig. 3).

Histograms of ionospheric mapping error (IME) for three different levels of solar activity: low (red line), mediate (green dot dash line) and high (blue dotted line) at the thin layer height of 350 km
According to the existing research (Arikan et al. 2003; Birch et al. 2002), it is found that the error of the thin layer ionospheric model is highly correlated with latitude and ionospheric layer height. Therefore, the following work is meant to analyze the IME at different latitudes and thin layer heights. In the present work, the IME is statistically analyzed, based on its mean and standard deviations, for latitudes from − 80° to 80° in steps of 20°, and for four different heights of the ionospheric layer, from 350 to 500 km in steps of 50 km, as shown in Table 1. The means and standard deviations of the IME near the equator are significantly higher than those of the other latitudes. In the same latitudes of the northern and southern hemispheres, the IME of the southern hemisphere is larger than that of the northern hemisphere, except for the equatorial region. In the middle latitudes (± 20 to ± 40), the ionospheric mapping is least affected by the ionospheric spatial gradient. In the northern hemisphere, the high-latitude regions of the spatial gradients are more pronounced than that of the mid-latitude regions. At different layer heights, the above rules are similar, although the values show differences. On the selected day, the optimal layer height is approximately 350 km for the entire globe.
Simulation study of azimuth-induced ionospheric mapping errors using NeQuick2
This work utilized the NeQuick2 ionospheric model to analyze ionospheric mapping errors between different satellite azimuths introduced by the ionospheric thin layer model. NeQuick2 is a 3D ionospheric electron density model that uses a modified profile formulation, which is proposed by Di Giovanni and Radicella (1990). Currently, the NeQuick2 model has two versions (Leitinger et al. 2005; Nava et al. 2008); the second version of NeQuick2 was used for this study. The model includes five semi-Epstein layers with modeled thickness parameters such as peak ionization, peak height and semi-thickness deduced from the ITU Radio (ITU-R) communication sector coefficients (Radicella 2009). Through the numerical integration, the NeQuick2 model can be used to calculate the vTEC of an arbitrary propagation path of a signal and the sTEC of the different azimuths at same IPP without a mapping function. Brunini and Azpilicueta (2010) assessed the accuracy of IFBs using the TLIM based on the Nequick2 model for different environmental conditions. Kashcheyev et al. (2012) used a realistic electron density field based on the NeQuick2 model to investigate higher order ionospheric errors. Brunini et al. (2011) analyzed the influence of the thin layer height of the TILM used to retrieve ionospheric information from the GNSS observation, relying upon numerical simulations performed with the NeQuick2 model. In addition, there are many scholars who have evaluated the performance of NeQuick2 model and showed that it is capable of predicting TEC with good correlation in most cases (Venkatesh et al. 2014; Leong et al. 2015; Wang et al. 2017). In these works, the TEC provided by the NeQuick2 model was considered true and without any errors. In the following work, the study is centered in the assessment of the errors due to the sTEC to vTEC conversion by means of a commonly used mapping function; therefore, inaccuracies are not considered in the model.
Ionosphere mapping errors
It is assumed that the geographical coordinates of the IPP are (φ ipp, λ ipp, H ion) and the coordinates of the satellite and the receiver are (φ s, λ s, H s), (φ r, λ r, H r); thus, the elevation angle and azimuth angle of the line of satellite and the receiver are e ion and A, respectively, at IPP. H r and H s are set to 60 and 2000 km, respectively, based on the range of distances from the ionosphere to the earth’s surface. Therefore, the coordinates of the satellite and receiver can be derived by giving the e ion, A, (φ ipp, λ ipp, H ion), H r, and H s. N(l) is used to represent the ionospheric electron density at any point, and vTEC and sTEC through the same IPP can be represented by \( \int_{{h_{1} }}^{{h_{2} }} {N(\varphi_{\text{ipp}} ,\lambda_{\text{ipp}} ,h)} \cdot {\text{d}}h \) and \( \int_{{r_{1} }}^{{r_{2} }} {N(\varphi_{\text{ipp}} ,\lambda_{\text{ipp}} ,e_{\text{ion}} ,A,r)} \cdot {\text{d}}r \), respectively. Taking vTEC and sTEC derived by the Nequick2 model as the reference, the mapping errors at an IPP can be expressed as (Wang 2016):
where f(e ion) is the simplest and most commonly used SLM mapping function (Schaer 1999).
As seen from (5), the error of the mapping at the IPP is only related to the height of the thin layer, the elevation angle and the azimuth angle. Given the height of the thin layer and the elevation angle of the satellite, we can evaluate the differences of the mapping errors for different azimuths.
Assessment of the IME
On the global scale, the spatial grid was set to a latitudinal resolution of 2.5° and a longitude resolution of 5°. Taking the solar flux index F10.7 as the input parameter of the NeQuick model, the mapping errors of each grid point were calculated based on (5) for different spatial directions. In this experiment, the ionospheric layer height was 350 km, and the elevation angle at the IPP is 30° (corresponding to 24° at the observation point).
Figure 4 shows the global ionospheric mapping error distributions at 06:00 UT, 14:00 UT, 22:00 UT (DOY 300, 2014). Figure 4 shows that the vTEC converted by the mapping function based on the sTEC was smaller than the real value of the vTEC in different spatial directions. In addition, the IME varied with the local time and was symmetrical north–south about the geomagnetic equator. Specifically, the mapping error reached a maximum in the north and south directions, especially in the low-latitude regions on both sides of the equator; the maximum error can reach 20 TECu. However, the IME was relatively small in the east and west directions, which indicates that the east–west spatial gradient was less than that in the south–north direction. In general, the mapping errors were different for the four directions (azimuth 0°, 90°, 180°, 270°); therefore, it is not reasonable to use a mapping function that takes into account only the satellite elevation angle and ignores the differences in the different spatial azimuths. In addition, it can be seen from the picture that the mapping errors were obviously related to latitude.

Global maps of the ionospheric mapping errors, referring to 06:00, 14:00, 22:00 UT of DOY 300, 2014, for the four satellite azimuths of 0°, 90°, 180°, and 270°, corresponding to the first to the fourth row, respectively
Table 2 gives the statistical results of the mapping errors in the different directions for each latitudinal band (interval 20°) at 14:00 UT (DOY 300, 2014). As shown in the table, the mapping errors overall showed a downward trend with increases of latitude; the mean value of the mapping errors of the − 30° to 30° latitudinal interval was significantly larger than that of other intervals. Of those intervals, the mean value of the mapping error of the 10° to 30° interval was the largest in the southern direction, reaching up to 6.71 TECu.
To further analyze the ionospheric mapping errors of the different latitudes, a chain of four IPPs along the 0° meridian was simulated for this assessment. The IPPs are equally spaced, with one every 20°, between 10° and 70° of the northern latitudes (the following study is referred to the northern latitudes). The numerical experiment was repeated for two different levels of solar activity: low (F10.7 = 92.6 sfu, DOY 203, 2014) and high (F10.7 = 203 sfu, DOY 355, 2014), both with a 350 km height of the ionospheric layer. Figures 5 and 6 show the variations of the mapping errors with the spatial azimuths and elevation angles at 10:00 UT. As illustrated in the figures, the IME during the quiet period of solar activity (DOY 203) was obviously less than that of the period of intense solar activity (DOY 355). With the increase in latitude, the IME decreases, and the IME of low-latitude area was basically twice as high as that of the high-latitude area. When the satellite elevation angle is low in the low-latitude region, the IME of the different spatial azimuths varied from − 1 to 3.5 TECu at the low level of solar activity (Fig. 5), and the IME of the different spatial azimuths ranged from − 1 to 9 TECu at the high level of solar activity (Fig. 6). In addition, the IME of the different geographical locations are basically symmetric about the azimuth 180°, and, as the satellite elevation angle increases, the differences between the IME of the different spatial orientations become smaller. When the elevation angle is more than 50°, the differences between the IME are less than 1 TECu for the different spatial azimuths. However, for the different geographic locations, the variations of trends of the IME corresponding to the different azimuth angles are different: in the low-latitude region (latitude 10°), the IME are the largest in the vicinity of the azimuth angle 180° and are the smallest at azimuth 0°; in the middle and high-latitude areas (latitude > 30°), the variation of the MFV is opposite to that of the low-latitude area, and the MFV does not change with the azimuth angle in the calm period of solar activity (DOY 203, 2014).

Variations of the mapping errors for a low level of solar activity (F10.7 = 92.6 sfu), for four geographical positions (latitude: 10°, 30°, 50° and 70°; longitude: 0°), and as a function of the spatial azimuth and elevation angle at 10:00 UT (DOY 203, 2014)

Variation of the mapping errors for the high level of solar activity (F10.7 = 203 sfu), for four geographical positions (latitude: 10°, 30°, 50° and 70°; longitude: 0°), and as a function of the spatial azimuth and elevation angle at 10:00 UT (DOY 355, 2014)
Figure 7 shows the variations of the IME with the ionospheric layer height for a chain of 16 IPPs, simulated for this assessment along the − 180°, 60°, 0°, and 120° meridians, at every 20° between 10° and 70° of geographic latitude, and for 06:00 UT on DOY 300, 2014. For each IPP, the LOS elevation angle was 30° at the IPP. These few cases show that in the low-latitude region, the east and west IME are less affected by the ionospheric layer height. In contrast, the IME in the south and north directions are less affected by the ionospheric layer height in the high latitudes. In different geographical locations, the IME affected by the ionospheric layer height are quite different. In general, the error value of the low-latitude area is higher than that of the high-latitude area. However, at 70° latitude and 120° longitude, the error value of the mapping function corresponding to the different ionospheric layer heights is relatively large, and the error value in the eastern direction is up to 20 TECu. There is a considerable difference between the polar ionospheric gradient and the equatorial region. Near the equatorial region, there exists a large TEC value, which can easily form a large gradient, while the TEC value of the polar region is small, and its change is rapid, such that it also produces a large gradient. On the whole, the absolute value of the IME in the different spatial directions decreases first and then increases with the increment of the ionospheric layer height, which is the smallest at the thin layer height of approximately 400 km. The mean of the absolute error is 5.4 TECu at this ionospheric layer height.

Variations of the error in the conversion from sTEC to vTEC in the TECu as functions of the ILH (in km) for 16 GNSS receivers along the − 180°, 60°, 0° and 120° meridians, with one every 20° between 10° and 70° latitude (the figure legend presents the corresponding spatial azimuths)
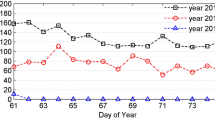
To verify the seasonal variations of IME, a chain of three IPPs along the 0° meridian was simulated for this assessment. The IPPs were equally spaced, with one every 30° between 0° and 60° latitude. For each receiver, the LOS elevation angle was 30° at the IPP. Figure 8 shows the distribution of the IME with time and spatial azimuths for 12:00 UT in 2014. These cases show that the range of IME at the three geographic positions (0°, 0°), (0°, 30°), and (0°, 60°) was − 6.0 to 12.0 TECu, − 2 to 8.0 TECu, and 0 to 4.0 TECu, respectively. At the same time, the IME present distinct seasonal variation characteristics: the IME in spring and autumn are higher than those in the summer and winter, which is consistent with the characteristics of the ionospheric TEC in the different seasons; however, in the low latitudes, the IME were abnormal and had larger values. The IME of the various spatial azimuths and latitudes also showed significant differences: the IME were basically symmetrical along the 180° azimuth angle; besides, in the mid-latitude region, the IME were smallest at the 180° azimuth and largest at the 0° azimuth angle; however, in the equatorial region, the opposite was true; in the high latitudes, the correlations between the IME and the azimuth angle were weak. This assessment only selects the data at 12:00 UT per day in 2014, so the varieties and differences may have been different at other times.

Variation of the mapping errors, ΔvTEC (in TECu), as a function of day of the year (x-axis) and IPP azimuth (y-axis, in degree)
The thin layer ionospheric model ignores the influence of the horizontal TEC gradient, and assumes that the TEC is the same for different directions. In fact, the ionospheric TECs of different spatial orientations are quite different, especially in the vicinity of the equator (see Fig. 4). The commonly used mapping function is only related to the ionospheric layer height and the elevation angle of the satellite and does not take into account the differences in the spatial orientations of the ionospheric TECs. Therefore, according to the thin layer ionospheric model and mapping function, there will be a significant error in the modeling of the TEC in the equatorial and low-latitude ionosphere regions.
Characteristics of ionospheric mapping function with azimuth
In the last section, the vTEC and sTEC based on the NeQuick2 were used to evaluate the error of the SLM mapping function with different azimuths. Although IME intuitively reflect model errors for the different azimuths, some regions may have large ionospheric horizontal gradients, but the IME cannot be fully reflected in cases such as bipolar regions. However, a mapping function value (MFV) could solve this problem. Taking the sTEC and sTEC information given by NeQuick2 as a reference, the change of the mapping function value with the spatial azimuth angle can also be analyzed. For the vTEC and sTEC at the same IPP, the corresponding MFV can be defined as (Wang 2016)
where the meaning of each parameter is the same as in (5). Equation (6) is used to analyze the variations of the characteristics of MFV with time, ionospheric layer height, satellite elevation angle and azimuth angle.
To analyze the variations of MFV for a year at different locations, a chain of four IPP along 60° meridian was simulated. The observing sites were equally spaced, with one every 20° between 10° and 70° latitude. For each IPP, the LOS elevation angle varied from 20° to 50° with a step of 10° at the IPP. The numerical simulation was repeated for three different heights of the ionospheric layer, from 350 to 450 km in steps of 50 km, for the 2014 year. Figure 9 gives a summary of how the MFV varied with the satellite azimuth angle. It can be seen that, when the elevation angle is low, the MFV corresponding to the different spatial azimuth angle changed considerably; however, when the elevation angle was increased to approximately 40°, the difference of the MFVs among the different azimuth angles was small. In the mid-latitude region (latitude: 30° and 50°), the change of the amplitude of the MFV corresponding to the different spatial azimuths was smaller than that in the low and high latitudes, which is consistent with the global change of the ionosphere. In the case of the high latitude variations of MFV, the differences appeared larger than those of the mid and low latitude variations of MFV with spatial azimuth, in particular, with a thin layer height of 400 km. Due to the influence of the ionospheric layer height, there were differences in the MFVs between the different thin layer heights at the same geographic location. When the ionospheric layer height was 450 km, the change in range of the MFV at the low elevation angles increases obviously. In the high latitudes, the MFV change was still large, even when the elevation reaches 40°. In general, when the satellite elevation angle was more than 50°, the MFVs of the different spatial orientations tended to be consistent and were less affected by the horizontal gradient of the ionosphere; when the elevation was less than 40°, the MFVs varied in a complex way with the azimuth angle and were affected by many factors, such as latitude, elevation angle and ionospheric layer height, and it is, therefore, difficult to find a unified mathematical function to fit.

Variations of the MFVs estimated from (6) for the elevation of 20°, 30°, 40° and 50° as functions of the azimuth (in degrees) for the four IPPS at 10°, 30°, 50° and 70° latitude along the 60° meridian; for the different ILH at 350, 400 and 450 km; and for 06::00 UT during 2014
In addition, we analyzed the performance of commonly used MFs in different geographical locations. Commonly used ionospheric mapping functions mainly include SLM mapping functions, mediated single-layer model (MSLM) mapping functions, the Klobuchar mapping function, the mapping function proposed by Foelsche and Kirchengast (2002) (hereinafter referred to as F–K) and the mapping function proposed by Ou (1996) (hereinafter referred to as Ou).
The SLM mapping is the simplest mapping function, and can be written as
where e is the satellite elevation angle at the receiver, R earth is the earth radius, H ion is the height of the thin layer.
Schaer (1999) proposed a modified SLM mapping function by comparing this function with the Chapman function. The MSLM mapping function value is closer to that of the Chapman mapping function value. The MSLM is given by the expression
where k is a correction factor, which is close to unity, Z is the satellite zenith distance at the observation point, and \( H_{\text{opt}} = 506.7\,\text{km} \).
The mapping function suggested by Klobuchar for the GPS broadcast ionospheric model approximates the SLM mapping function and may be written as (Klobuchar 1987)
where e is the semi-circumference.
The F–K mapping function was originally developed for converting slant-path-integrated atmospheric water vapor to the vertical direction using the hydrostatic path delay retrieved from GNSS observations (Foelsche and Kirchengast 2002). The F–K mapping function is given by
where the meaning of each parameter is the same as in (7).
The Ou mapping function, a segmented ionospheric mapping function with elevation angle changes, is given by (Ou 1996)
where P is a scaling factor associated with the satellite elevation angle.
The abovementioned ionospheric mapping functions only take into account the effects of the ionospheric layer height and the satellite elevation angle, without considering the influence of the ionospheric horizontal gradient. The following section analyzed the variation of these mapping functions at different geographic locations and compared them with the MFVs at different spatial azimuths.
In this section, a chain of 12 GNSS receivers was used along the − 180°, 60°, 0° and 120° meridians, with one every 30°, between 0° and 60° latitude for 12:00 UT on DOY 355, 2014. Figure 10 represents what could be considered the ionospheric mapping function values (MFV′) obtained from (7) to (11) and the MFVs of the different azimuths varied with satellite elevation in the present work. The remarkable feature in Fig. 10 is that the values of each ionospheric mapping function are reduced exponentially with the increase of the elevation angle at the IPP. Another interesting feature in the figure is that the different mapping functions are not very different when the elevation angle increases to 50°. At the same time, the MFVs corresponding to the different spatial azimuth angles were different: In the middle and low-latitude regions, the MFVs were the smallest at azimuth angle 0° and the largest at azimuth angle 180°; in the high latitudes, the MFVs were the smallest at azimuth angle 270° and the largest at azimuth angle 0°.

Variation with satellite elevation angle (in degree, at the IPP) of the five commonly used ionospheric mapping functions (different colors; solid lines) and four “true” MFVs (different colors; dotted lines) that correspond to the azimuths (at the IPP) 0°, 90°, 180° and 270°; for 12 IPP locations along the − 180°, 60°, 0° and 120° meridians, with one every 30° between 0° and 60° latitude
In this section, the satellite elevation range is \( \varvec{el} = [20^{ \circ } ,25^{ \circ } ,30^{ \circ } , \ldots ,90^{ \circ } ] \), and the corresponding MFV ′ and MFV vectors are \( \varvec{MF}V_{i}^{{\prime }} (i = 1,2,3,4,5) \), \( \varvec{MFV}_{j} (j = 1,2,3,4) \) respectively. To quantify the accuracy of the different ionospheric mapping functions, the standard deviation for each MFV ′ were considered:
where std() is a function to compute the standard deviation of the vector.
Table 3 presents the statistical analysis of standard deviation for each MF, estimated by (12) at different latitudes for 12:00 UT on DOY 355, 2014. According to the table, it is found that the MSLM and Ou functions are better than the other mapping functions, and their accuracies are better than 0.3. When the satellite elevation angle is low (less than 40°), the F–K mapping function accuracy is lower relative to the other mapping functions and is not suitable for use.
Summary and conclusions
This study analyzed the influence of the ionospheric spatial gradient on the TLIM under various solar conditions, using the statistical analysis technique of CPP and numerical simulations based on the NeQuick2 model. The dataset of the GPS-derived sTEC data was extracted from 460 global tracking stations of the IGS and covered the different solar activities during selected geomagnetically quiet days. The numerical simulations analyzed the IME variations for different spatial azimuths around the globe. The IME were first reorganized according to elevation, azimuth, locations, and solar conditions. In addition, the MFVs were analyzed under different azimuths and compared to several commonly used mapping functions.
According to the “coinciding pierce point” technique performed in this work, the level of solar activity has a significant impact on IME, the IME is increasing as the solar activity intensifies. In addition, at low latitudes, the values of the IME were obviously more than those of the middle and high latitudes. Finally, the thin layer heights were also related to the IME; the optimal thin layer height was 350 km for the selected days.
The simulation results showed that the vTEC converted by the MF was smaller than the real value of the vTEC in different spatial directions, and the IME was symmetrical north–south about the geomagnetic equator. Meanwhile, in the north and south directions, the IME was more than that in the east and west directions; the mean IME value was approximately of 6.7 TECu and the maximum was up to 20 TECu in the low latitudes. In different geographical locations, the IME affected by the thin layer height showed differences: in the low latitudes, the south and north IME were impacted more by the thin layer height; however, in the high latitudes, the IME in the eastern and western directions were more affected by the thin layer height. When the elevation angle was more than 50°, the differences of the IME were less than 1 TECu for different spatial azimuths. It is shown that the IME were symmetrical about the 180° azimuth and presented obvious seasonal variation characteristics: the IME in the spring and autumn were higher than those in the winter and summer; however, at the low latitudes, the IME were abnormal and had larger values. In addition, the MFV corresponding to the different spatial azimuth angles changed greatly at low elevations, especially in the high latitudes; however, when the elevation angle is increased to approximately 40°, the differences of MFVs among the different azimuth angles become small. Compared to the different spatial direction MFVs, the Ou and MSLM mapping functions outperformed other commonly used mapping functions, such as the MSL, Klobuchar and F–K mapping function at different latitudes.
According to the analysis of this study, the error introduced by the TLIM is affected by many factors. However, some suggestions can still be given to minimize the model error. In low-latitude areas, there exists large IME; the receivers can set the satellite elevation to higher than 40°. According to the specific environment, the ionospheric models select the optimal thin layer height. In addition, we can select the appropriate mapping function to adapt to the different geographical locations.
References
Arikan F, Erol CB, Arikan O (2003) Regularized estimation of vertical total electron content from Global Positioning System data. J Geophys Res 39(2007):867–874
Arslan N, Demirel H (2008) The impact of temporal ionospheric gradients in Northern Europe on relative GPS positioning. J Atmos Sol Terr Phys 70(2008):1382–1400. https://doi.org/10.1016/j.jastp.2008.03.010
Basu S, Basu S, Valladares C, Yeh HC, Su SY, MacKenzie E, Sultan P, Aarons J, Rich F, Doherty P (2001) Ionospheric effects of major magnetic storms during the International Space Weather Period of September and October 1999: GPS observations, VHF/UHF scintillations, and in situ density structures at middle and equatorial latitudes. J Geophys Res 106(2001):30389–30413
Bilitza D, Reinisch BW (2008) International reference ionosphere 2007: improvements and new parameters. Adv Space Res 42(4):599–609. https://doi.org/10.1016/j.asr.2007.07.048
Birch MJ, Hargreaves JK, Bailey GJ (2002) On the use of an effective ionospheric height in electron content measurement by GPS reception. Radio Sci 37(1015/2002):1–19. https://doi.org/10.1029/2000rs002601
Brunini C, Azpilicueta F (2010) GPS slant total electron content accuracy using the single layer model under different geomagnetic regions and ionospheric conditions. J Geod 84(5):293–304. https://doi.org/10.1007/s00190-010-0367-5
Brunini C, Camilion E, Azpilicueta F (2011) Simulation study of the influence of the ionospheric layer height in the thin layer ionospheric model. J Geod 85(9):637–645. https://doi.org/10.1007/s00190-011-0470-2
Dach R, Brockmann E, Schaer S, Beutler G, Meindl M, Prange L, Bock H, Jaeggi A, Ostini L (2009) GNSS processing at CODE: status report. J Geod 83(3–4):353–365. https://doi.org/10.1007/s00190-008-0281-2
Davies K, Hartmann GK (1997) Studying the ionosphere with the Global Positioning System. Radio Sci 32(4):1695–1703. https://doi.org/10.1029/97RS00451
Di Giovanni G, Radicella S (1990) An analytical model of the electron density profile in the ionosphere. Adv Space Res 10(11):27–30
Dymond K, Thomas R (2001) A technique for using measured ionosphere density gradients and GPS occultations for inferring the nighttime ionospheric electron density. Radio Sci 36:1141–1148
Feltons J (2003) The international GPS service (IGS) ionosphere working group. Adv Space Sci 31(3):635–644
Foelsche U, Kirchengast G (2002) A simple “geometric’’ mapping function for the hydrostatic delay at radio frequencies and assessment of its performance. Geophys Res Lett 29:1473. https://doi.org/10.1029/2001GL013744
Hernández-Pajares M, Juan J, Sanz J, Orus R, Garcia-Rigo A, Feltens J, Komjathy A, Schaer S, Krankowski A (2009) The IGS VTEC maps: a reliable source of ionospheric information since 1998. J Geod 83(3):263–275. https://doi.org/10.1007/s00190-008-0266-1
Hoque MM, Jakwoski N (2013) Mitigation of ionospheric mapping function error. In: Proceedings of the ION GNSS+, Nashville/Tennessee/USA, 16–20 Sept
Kashcheyev A, Nava B, Radicella SM (2012) Estimation of higher-order ionospheric errors in GNSS positioning using a realistic 3-D electron density model. Radio Sci 47:RS4008. doi:10.1029/2011RS004976
Keroub IH (1976) Structure of latitudinal total electron content (TEC) gradients over mid-latitude stations. Ann Geophys 32:227–242
Klobuchar JA (1987) Ionospheric time-delay algorithm for singlefrequency GPS users. IEEE Trans Aero Electron Syst 23(3):325–331
Komjathy A, Sparks L, Mannucci AJ, Coster A (2005) The ionospheric impact of the October 2003 storm event on wide area augmentation system. GPS Solut 9(1):41–50. https://doi.org/10.1007/s10291-004-0126-2
Konno H, Pullen S, Luo M, Enge P (2005) Analysis of ionosphere gradient using Japan GEONET data. In: Proceedings ION-NTM-2005, Institute of Navigation, San Diego, CA, January, pp 1118–1129
Leitinger R, Zhang M, Radicella MS (2005) An improved bottomside for the ionospheric electron density model Nequick2. Ann Geophys 48(3):525–534
Leong SK, Musa TA, Omar K, Subari MD, Pathy NB, Asillam MF (2015) Assessment of ionosphere models at Banting: performance of IRI-2007, IRI- 2012 and NeQuick2 models during the ascending phase of Solar Cycle 24. Adv Space Res 55(8):1928–1940
Liu J, Chen R, Wang Z, Zhang H (2011) Spherical cap harmonic model for mapping and predicting regional TEC. GPS Solut 15(2):109–119. https://doi.org/10.1007/s10291-010-0174-8
Liu J, Hernandez-Pajares M, Liang X, An J, Wang Z, Chen R, Sun W, Hyyppä J (2016) Temporal and spatial variations of global ionospheric total electron content under various solar conditions. J Geod 91(5):485–502. https://doi.org/10.1007/s00190-016-0977-7
Luo M, Pullen S, Walter T, Enge P (2004) Ionosphere spatial gradient threat for LAAS: mitigation and tolerable threat space. In: Proceedings of the 2004 national technical meeting of the institute of navigation, pp 490–501
Mannucci AJ, Wilson BD, Yuan DN, Ho CH, Lindqwister UJ, Runge TF (1998) A global mapping technique for GPS-derived ionospheric total electron content measurements. Radio Sci 33(3):565–582. https://doi.org/10.1029/97RS02707
Mannucci AJ, Iijima BA, Lindqwister UJ, Pi X, Sparks L, Wilson BD (1999) GPS and ionosphere, review of Radio Science 1996–1999. Oxford University Press, New York
Memarzadeh Y (2009) Ionospheric modeling for precise GNSS applications. Doctoral dissertation, Delft Institute of Earth Observation and Space Systems, Delft University of Technology, Netherlands
Nava B, Radicella SM, Leitinger R, Cöisson P (2007) Use of total electron content data to analyze ionosphere electron density gradients. J Adv Space Res 39(8):1292–1297
Nava B, Coïsson P, Radicella SM (2008) A new version of the NeQuick ionosphere electron density model. J Atmos Sol Terr Phys 70(15):1856–1862
Orús R, Hernández-Pajares M, Juan J, Sanz J, Garcı́a-Fernández M (2002) Performance of different TEC models to provide GPS ionospheric corrections. J Atmos Sol Terr Phys 64(18):2055–2062
Ou J (1996) Atmosphere and its effects on GPS surveying. LGR-Series 14. Delft Geodetic Computing Center, Delft
Radicella SM (2009) The NeQuick model genesis, uses and evolution. Ann Geophys 52(3/4):417–422
Rama Rao PVSK, Niranjan DSVVD Prasad, Gopi Krishna S, Uma G (2006) On the validity of the ionospheric pierce point (IPP) altitude of 350 km in the Indian equatorial and low-latitude sector. Ann Geophys 24(2006):2159–2168
Schaer S (1999) Mapping and predicting the earth’s ionosphere using the global positioning system. Doctoral dissertation, Univ. Bern, Switzerland
Tao A-L, Jan S-S (2016) Wide-area ionospheric delay model for GNSS users in middle- and low-magnetic-latitude regions. GPS Solut 20(1):9–21
Venkatesh K, Fagundes PR, de Jesus R, de Abreu AJ, Pillat VG, Sumod SG (2014) Assessment of IRI-2012 profile parameters by comparison with the ones inferred using NeQuick2, ionosonde and FORMOSAT-1 data during the high solar activity over Brazilian equatorial and low latitude sector. J Atmos Sol Terr Phys 121:10–23
Vo H, Foster J (2001) A quantitative study of ionospheric density gradients at midlatitudes. J Geophys Res 106(2001):21555–21563
Wang N (2016) Study on GNSS differential code biases and global broadcast ionospheric models of GPS, Galileo and BDS. Doctoral dissertation, University of Chinese Academy of Sciences, China
Wang N, Yuan Y, Li Z, Huo X (2016) Improvement of Klobuchar model for GNSS single-frequency ionospheric delay corrections. Adv Space Res 57(7):1555–1569
Wang N, Yuan Y, Li Z, Li Y, Huo X, Li M (2017) An examination of the Galileo NeQuick model: comparison with GPS and JASON TEC. GPS Solut 21(2):605–615
Zus F, Deng Z, Heise S, Wickert J (2017) Ionospheric mapping functions based on electron density fields. GPS Solut 21(3):873–885. https://doi.org/10.1007/s10291-016-0574-5
Acknowledgments
The authors would like to acknowledge the Crustal Dynamics Data Information System (CDDIS) of the International GNSS Services (IGS) for providing access to the GPS observation data. We would also like to acknowledge the International Center for Theoretical Physics (ICTP) for providing the NeQuick2 sources. This research was supported by the Natural Science Funds of China (Nos. 41231064, 41776195, 41531069, 41174029 and 41474029) and the National Key Research Development Program of China with project No. 2016YFB0502204.
Author information
Authors and Affiliations
Corresponding authors
Rights and permissions
About this article

Cite this article
Jiang, H., Wang, Z., An, J. et al. Influence of spatial gradients on ionospheric mapping using thin layer models. GPS Solut 22, 2 (2018). https://doi.org/10.1007/s10291-017-0671-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10291-017-0671-0