
Abstract
In stochastic optimisation, the large number of scenarios required to faithfully represent the underlying uncertainty is often a barrier to finding efficient numerical solutions. This motivates the scenario reduction problem: by finding a smaller subset of scenarios, reduce the numerical complexity while keeping the error at an acceptable level. In this paper we propose a novel and computationally efficient methodology to tackle the scenario reduction problem for two-stage problems when the error to be minimised is the implementation error, i.e. the error incurred by implementing the solution of the reduced problem in the original problem. Specifically, we develop a problem-driven scenario clustering method that produces a partition of the scenario set. Each cluster contains a representative scenario that best reflects the optimal value of the objective function in each cluster of the partition to be identified. We demonstrate the efficiency of our method by applying it to two challenging two-stage stochastic combinatorial optimization problems: the two-stage stochastic network design problem and the two-stage facility location problem. When compared to alternative clustering methods and Monte Carlo sampling, our method is shown to clearly outperform all other methods.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
When uncertainty is present in decision-making contexts, scenario generation refers to the methods used to sample the set of possible outcomes of the random parameters (Kaut 2012; Keutchayan et al. 2017). Such methods are staples in the design of decision support techniques that explicitly consider the uncertainty affecting the parameters defining the informational context in which problems are to be solved. In particular, scenario generation methods are readily applied in stochastic optimization to obtain approximations of the probability distributions, i.e., possible outcomes, that are used to implicitly formulate how the uncertain (or stochastic) parameters randomly vary (Birge and Louveaux 2011). The generation of such outcomes can then be used statically to solve particularly hard stochastic optimization models, such as the stochastic network design problems (Rahmaniani et al. 2018), or probabilistically to produce probabilistic bounds, such as in the sample average approximation method (e.g. Kleywegt et al. (2002); Luedtke and Ahmed (2008)) and the stochastic decomposition strategy (e.g. Higle and Sen (1991)). In all cases, an important challenge that is often faced is that the size of the generated scenario set can be very large, for example in order to obtain a good approximation to the underlying uncertainty measure. This large size of the scenario set can be an obstacle to its use for the computational purposes associated with stochastic optimization.
Specifically, when a scenario set is used to formulate a stochastic optimization model, the resulting scenario-based formulation will typically be large-scale with its size being directly related to the cardinality of the set (Birge and Louveaux 2011). Such formulations quickly become intractable to solve directly, especially in the case of stochastic integer programs, as shown for instance in Dyer and Stougie (2006). Therefore, the generation of scenarios is a delicate step in any algorithmic strategy aimed to efficiently solve stochastic combinatorial optimization models. This step is subject to a trade-off: on the one hand, a sufficiently large set of meaningful scenarios should be generated to properly capture how uncertain parameters may randomly vary; but on the other hand, the size of the set should not be too large that it prevents the resulting formulation to be solved in an appropriate manner.
The combinatorial challenges of large-scale optimization models motivate the study of scenario reduction methods. The goal of these methods can be stated as follows: given a particular scenario set, identify a subset of a given fixed size that minimizes some approximation error induced by replacing the original set with the identified subset. Considering that the number of scenarios required to model appropriately a real-word (generally multi-dimensional) probability distribution is typically too large to be directly used in the context of solving stochastic combinatorial optimization problems, tackling the scenario reduction problem is unavoidable to design computational efficient solution approaches in this context.
When surveying the scientific literature, one finds that there has been a steady stream of research dedicated to the development of methods to efficiently generate scenario sets that can be applied in the context of performing stochastic optimization. Such methods can be classified in two groups: the distribution-driven ones and the problem-driven ones. Distribution-driven methods perform scenario generation based on a criterion linked to the probability distribution that underlies the problem, and not directly the problem itself. Such approaches seek to find the subset that provides the approximation that is probabilistically closest to the original scenario set, see e.g. Dupačová et al. (2003); Römisch (2009); Henrion et al. (2009). In that settin, a metric is used to evaluate the distance between probability distributions, which defines the error function that is minimized by the scenario reduction procedure. This is the case for instance of the methods that minimize the Wasserstein distances (Pflug and Pichler 2015), or those that aim at matching the moments of the distribution (Høyland et al. 2003). Other scenario generation methods such as Monte Carlo (e.g. Kleywegt et al. (2002)), quasi-Monte Carlo methods (e.g. Heitsch et al. (2016)), and sparse grid quadrature (e.g. Chen et al. (2015)) also fall in this category since they aim at discretizing the probability distribution using a finite number of outcomes . Stated differently, a distribution-driven method will tend to operate in the same way when applied to two different stochastic problems with the same underlying probability distribution.
Conversely, a problem-driven method aims at generating scenarios by considering the problem as a whole, which in addition to the probability distribution also includes any relevant property of the problem that can be drawn from its objective function and constraints. In that case, two problems with the same underlying distribution but different objective functions will likely not be formulated using the same scenario set. The objective function is indeed important to consider since, for instance, a risk-averse problem featuring a log-utility function might require a different scenario set than its risk-neutral version as it might be sensitive to different aspects of the distribution. Although the vast majority of methods used for scenario generation fall in the distribution-driven category, as it has been the only predominant one historically, approaches falling in the problem-driven category have been recently studied in Henrion and Römisch (2018); Fairbrother et al. (2019); Keutchayan et al. (2020); Høyland and Wallace (2001) as a means to provide more efficient procedures to generate scenarios.
The problem-driven approaches are logically viewed as being more powerful, since they are made to consider the problem as a whole and not solely its probability distribution. Practitioners currently lack practical algorithms that could be used systematically to generate scenarios for their problem. Practitioners currently lack practical algorithms that could be used systematically to generate scenarios for their problem. The situation is different for the distribution-driven approaches, which provide plenty of algorithms available off the shelf, such as Monte Carlo sampling or the k-means clustering. The goal of our paper is to provide one such systematic problem-driven algorithm.
A somewhat similar approach to the one developed in this paper was proposed by Prochazka and Wallace (2020). Both our and their approaches aim at building an intermediate optimization problem from a pool of solutions, and at solving it (exactly or approximately) in order to construct a scenario tree with some desirable problem-driven features. However, we note that some major differences exist between the two approaches.
One of the main ingredients in both our approach and that of Prochazka and Wallace (2020) is the choice of a pool of solutions. In Prochazka and Wallace (2020), the pool of solutions is chosen heuristically by solving the original problem (Prochazka and Wallace 2020, p 280). Thus, the methods of Prochazka and Wallace (2020) require a high level of problem-specific adaptations. For example, efficient heuristics need to be tailored to the specific problem charcteristics.
By contrast, our approach first decomposes the original problem into scenario-specific subproblems. We then seek to identify solutions for these subproblems to be used as representative data. The solutions can either be obtained by solving the subproblems exactly, or—as illustrated in our experiments—by solving approximately using the continuous relaxation. The general interest of basing this analysis on single-scenario subproblems was showcased in Hewitt et al. (2021).
The optimization problems obtained by the two approaches also differ by the fact that the problem obtained in Prochazka and Wallace (2020) is non-linear and non-convex (the authors propose a gradient-descent algorithm to minimize it), while in our case the problem to be solved to build the scenario tree is a mixed-integer linear program (MILP).
The reason why these two optimization problems are so different comes from the very definition of their objective functions. In the paper of Prochazka and Wallace (2020), the so-called loss function to be minimized is built so as to match what the authors define to be the requirements of a good scenario tree.
We propose a novel and computationally efficient methodology to tackle the scenario reduction problem for two-stage problems, when the objective pursued is to minimize the implementation error. This error is defined as the difference between the optimal value of the original problem and the value of the solution provided by solving the problem on the reduced scenario set. In practice, it corresponds to the error that would be made by implementing the scenario tree decisions in the original problem. It is therefore very relevant for practitioners. Specifically, we develop a problem-driven scenario clustering method that produces a partition of the scenario set that enables representative scenarios to be identified, which best reflect the conditional objective values over the cluster they represent.
The proposed method is applied to solve the scenario reduction problem for two challenging stochastic combinatorial optimization problems: the two-stage stochastic network design problem and the two-stage facility location problem. When compared to four alternative methods: k-means, k-medoids, k-medians and Monte Carlo sampling, our method is shown to clearly outperform all other methods, i.e., it greatly reduces the number of scenarios while efficiently limiting the implementation errors induced. Moreover, in the case of the two-stage facility location problem, the method is capable of finding near-optimal solutions to the full size scenario-based model by reducing the original set to a single scenario, which the other tested methods are incapable of.
The rest of the paper is structured as follows. Section 2 presents the general stochastic optimization problem that we are considering in this paper. Section 3 describes some of the most popular methods that can be used to reduce the number of scenarios. Section 4 is dedicated to the statement of our algorithm along with a concrete illustration. Section 5 presents our numerical results, and Sect. 6 concludes.
2 Problem statement
This section is devoted to a precise statement of the class of stochastic optimization problems for which we develop a new problem-driven scenario reduction method.
2.1 Original problem
We consider the following stochastic optimization problem:
where \(\xi _1,\dots ,\xi _N\) are equiprobable scenarios taking values in \(\mathbb {R}^d\) and \(F(x, \xi _i)\) represents the cost associated with the decisions \(x\in X\) in scenario \(\xi _i\). We assume that the probability measure assigning equal probability \(\frac{1}{N}\) to each element in the set \(\left\{ \xi _1,...,\xi _N\right\}\) represents an accurate estimate of the underlying uncertainty governing the parameters of the problem. However, in our setting the number N of scenarios is too large as to be able to solve (1) efficiently.
The optimal solution of this problem is denoted by \(x^*\) and its optimal value by \(v^*\). Note that there is no restriction in the number of scenarios (N), decisions (n), and random parameters (d); these can be any positive integers. Note also that the problem is formulated using equiprobable scenarios for simplicity; the method introduced in this paper can be easily generalized to scenarios with different probabilities. To avoid any confusion, we note that the formulation (1) implies that the set X of decision variables is deterministic.
The cost function F may be given explicitly (if the problem is one-stage), or may be itself the result of a second-stage optimization problem. In this latter case, which is the framework of two-stage stochastic programming, it typically takes the following form:
for some second-stage cost function \(g(x, y, \xi _i)\) and second-stage decisions \(y\in Y(x,\xi _i)\subseteq \mathbb {R}^{m}\) (see, for instance, Birge and Louveaux (2011)).
In the following, we require the problem to satisfy the condition of relatively complete recourse. That is, it must hold that \(F(x,\xi _i) <\infty\) for all \(x\in X\) and \(i\in \{1,\dots ,N\}\). The reason this property is required will become clear in the next section when we introduce the approximate problem. We do not impose any other condition on F besides the basic ones ensuring that problem (1) is well-defined, i.e., there exists an optimal solution \(x^*\). Such conditions can be found in Rockafellar and Wets (2009). Note that, in practice, some conditions like the linearity (or convexity) of \(F(x,\xi _i)\) as a function of x greatly improve one’s ability to solve the problem; however they are not technically required in our theoretical developments.
The scenarios \(\xi _1,\dots ,\xi _N\) may be given from historical data (e.g., from N daily observations of demands for d items in a retail store), or they may be sampled from a multivariate probability distribution as in the sample average approximation (SAA) of Shapiro (2003). In some cases, if N is large (how large depends on the problem) and if the problem is computationally challenging to solve, it may happen that finding a good solution for problem (1) with N scenarios is out of reach for even the best solvers available today. In that situation, one way to ease the computational burden is to reduce the problem size by building a smaller problem with fewer scenarios. However, building such a problem is not an easy task as it should be done with the goal of finding a solution with a value as close as possible to that of the original problem, \(v^*\).
2.2 Approximate problem
Suppose that problem (1) cannot be solved as it is, so we need to build from it an approximate problem composed of K scenarios with \(K \ll N\). There are two broad ways to generate those scenarios: they may be picked directly in the original set \(\{\xi _1,\dots ,\xi _N\}\), or they may be completely new scenarios that do not exist in the original set. In this paper, we are specifically interested in choosing a subset of the original scenario set, and not in generating new scenarios. This is known as the scenario reduction problem.
Consider for now that this set has been computed, and let us denote it by \(\{\widetilde{\xi }_1, \dots , \widetilde{\xi }_K\}\) with the corresponding probabilities \(\{p_1,\dots ,p_K\}\). The approximate problem takes the form:
and its optimal solution is denoted by \(\widetilde{x}^*\).
Under the condition of relative complete recourse stated in Sect. 2.1, any optimal solution of (3) is a feasible solution of (1). This ensures that \(\widetilde{x}^*\) can be evaluated in the original problem. Its value, \(f(\widetilde{x}^*)\), therefore provides an upper bound on \(v^*\).
The goal of the scenario reduction approach is to find the scenarios \(\widetilde{\xi }_1, \dots , \widetilde{\xi }_K\) and their probabilities \(p_1, \dots , p_K\) that provide the smallest upper bound, i.e., such that the gap
is as close as possible to zero.
In the following, we refer to (4) as the implementation error, as it corresponds to the error that would be made by implementing in the original problem (1) the optimal decisions given by the approximate problem (3). It is always non-negative (by optimality of \(x^*\)) and it equals zero if and only if \(\widetilde{x}^*\) is also optimal for (1). In the literature, the implementation error is also known as the approximation error Pflug (2001) or optimality gap Kaut (2012).
3 Scenario reduction methods
Clustering methods provide a generic way to compute the reduced set of scenarios \(\{\widetilde{\xi }_1, \dots , \widetilde{\xi }_K\}\). Generally speaking, a clustering method is an algorithmic procedure that partitions the original scenario set \(\{\xi _1,\dots ,\xi _N\}\) into K clusters \(C_1,\dots ,C_K\), of possibly different sizes, such that scenarios close to each other in the sense of some metric d lie in the same cluster. In the context of scenario reduction, we are specifically interested in the clustering methods that output a centroid scenario \(\widetilde{\xi }_k\) for each cluster \(C_k\); this centroid becomes the representative scenario of the cluster and is then given the probability \(p_k = \vert C_k\vert / N\). Clustering methods will differ by the metric used to measure the distance between each pair of scenarios and by whether they pick the representatives as a member of the original set or not, i.e., whether \(\widetilde{\xi }_k \in C_k\) or \(\widetilde{\xi }_k \not \in C_k\). For a general presentation on clustering methods, see, e.g., Han et al. (2011); Jain and Dubes (1988).
Perhaps the most popular clustering method is the k-means algorithm, which aims at minimizing the sum of square \(L_2\)-distances within each cluster (see, e.g., Arthur and Vassilvitskii (2006)). The centroid is given by the average scenario over the cluster; as such it may not be a member of the original set. The k-means algorithm is a method of vector quantization particularly suitable for scenario reduction. It is connected to the problem of finding the distribution sitting on K scenarios that minimizes the 2nd-order Wasserstein distance from the original scenarios set (Ho et al. 2017). This minimization problem is computationally difficult (NP-hard). The k-means algorithm provides a fast heuristic approach that allows finding locally optimal solutions quickly. For more information on the Wasserstein distance and its relevance in the context of stochastic optimization, we refer to Pflug (2001); Pflug and Pichler (2015).
The k-medians algorithm (Jain and Dubes 1988) follows a similar idea but minimizes the sum of \(L_1\)-distances. It has the advantage of being less sensitive to outliers than k-means, because of the robustness of the median as compared to the mean. The k-means and k-medians algorithms are suitable for numerical data only, not for categorical (i.e. non-numerical) variables. The k-modes algorithm (Huang 1998) considers the discrete distance, which equals zero if the two scenarios are equal and one otherwise, which makes it suitable to work with scenarios made of categorical variables.
The three aforementioned methods have in common that the representative scenarios may not lie in the original set. The k-medoids algorithm (also sometimes called “partition around medoids”) is similar to k-means, but unlike the latter, it enforces the centroids to be part of the original set of scenarios. Moreover, it can be used with any scenario distance d (see, e.g., Schubert and Rousseeuw (2019)). In the context of stochastic optimization, the k-medoids algorithm provides a local search heuristic that aims at solving the optimal scenario reduction problem formulated in Rujeerapaiboon et al. (2018); Henrion and Römisch (2018). A practical advantage of k-medoids over k-means is that the former guarantees that the scenarios used in the approximate problem are actual scenarios that can occur in reality since they are picked in the original set. However, the latter has the advantage to be much faster.
Recently, another approach that has been developed to group scenarios that exhibit common characteristics is the decision-based clustering method introduced in Hewitt et al. (2021). This approach seeks to cluster scenarios (from the original set) that induce similar solutions with respect to the stochastic optimization model. For a given scenario, its induced solution represents the decisions that would be made if the particular scenario could be accurately predicted. Based on this clustering approach, an alternative medoid upper bound was proposed to obtain an approximate problem. In this case, the medoid of a cluster is identified as the scenario whose induced solution represents the closest proxy for the solutions associated with all other scenarios within the group.
Another problem-based scenario reduction approach for linear stochastic programs with fixed recourse has recently been proposed by Bertsimas and Mundru (2022), where the objective is to minimise the \(2\text {nd}\) Wasserstein distance (Kantorovich 1939) of the empirical measure of the selected subset to that of the original scenario set. The approach presented in Bertsimas and Mundru (2022) is, however, somewhat restrictive with respect to the optimisation problems it can be applied to. For example, it requires that distinct scenarios lead to distinct single-scenario solutions (see their Assumption 3).
We would also like to mention several related previous papers containing clustering ideas. In Feng and Ryan (2016), a generic scenario-reduction heuristic called the forward selection in recourse clusters was proposed. This heuristic is based on the idea of a solutoin sensitivity index that needs to be developed in each problem specific instance separately. Even earlier, a scenario reduction framework that minimizes both the probabilistic distance and the differences between best, worst and expected perfomances of the output between the original and the reduced scenario set. See also Sun et al. (2018).
The ‘predict and optimise’ approach could be viewed as a much simplified version of clustering. It consists of attempting to predict the ‘best’ scenario and then optimising the deterministic one-scenario subproblem with respect to this single scenario. As explained in Bengio et al. (2019), this relies on hypothesis that such a representative scenario exists. Based on the rather strong assumption that one of the optimal solutions for the deterministic scenario problems is also optimal for the stochastic problem, Bengio et al. (2019) propose a supervised learning algorithm to predict the representative scenario for certain two-stage stochastic integer programs. Of course, their hypothesis is somewhat restrictive because in many stochastic optimisation problems, the stochastic solution exhibits very different characteristics to any of the deterministic solutions, see for example King and Wallace (2012) and Wallace (2010) and the literature on the value the of stochastic solution, e.g. Birge (1982).
In the same research direction, Elmachtoub and Grigas (2022) propose a prediction algorithm whose loss function is not defined in terms of the parameters of the problem, but rather based on the decisions in the optimisation problem. Their approach is limited to linear programs.
Finally, scenario reduction can also be performed using Monte Carlo sub-sampling. Unlike clustering methods, which must solve an optimization problem and therefore are computationally intensive, Monte Carlo sub-sampling simply consists of picking randomly a subset of K scenarios in the original set and assigning them equal probability 1/K. The relevance of Monte Carlo methods in the context of stochastic optimization has been well studied in Shapiro and Homem-de-Mello (2000); Shapiro (2003).
4 A new scenario clustering approach
In this section, we introduce the cost-space scenario clustering (CSSC) algorithm and illustrate its benefit using a concrete example. The development of a clustering method driven by the cost function of the problem is first motivated in Sect. 4.1. The mathematical basis is then provided in Sect. 4.2 and the algorithm is detailed in Sect. 4.3. In Sect. 4.4, the algorithm is applied on a specific two-stage stochastic problem to both illustrate its use and contrast its results with those obtained by applying clustering methods purely driven by the distribution.
4.1 Motivation of cost-driven clustering
The clustering approach developed in this paper does not consider a distance between scenarios in the space of random outcomes (\(\mathbb {R}^d\)) but instead in the space of cost values (\(\mathbb {R}\)). Specifically, this means that the proximity between two scenarios \(\xi _i\) and \(\xi _j\) is never measured directly by some metric \(d(\xi _i, \xi _j)\) defined over \(\mathbb {R}^d\times \mathbb {R}^d\) but through their value in the cost function: \(F(\cdot ,\xi _i)\) and \(F(\cdot ,\xi _j)\). This choice is motivated by the fact that, ultimately, a scenario reduction approach should aim at finding representative scenarios that provide a good approximation of the original problem, regardless of whether the clusters turn out to be good or bad in the sense of any such metric d.
To better understand this, consider the case where two scenarios \(\xi _i\) and \(\xi _j\) are very different, i.e., \(d(\xi _i, \xi _j)\) is large, but where they lead to the same value of the cost function, i.e., \(F(\cdot ,\xi _i) = F(\cdot , \xi _j)\). It is then easy to see that these two scenarios can be grouped together into the same cluster with either representative \(\xi _i\) or \(\xi _j\) and weight \(\tfrac{2}{N}\) without changing the solution of the original problem, hence resulting in a reduction of scenarios without loss of information as far as the stochastic problem is concerned.
The previous case of pairwise equality of cost values is not the only one that allow an error-free reduction. Consider now three scenarios \(\xi _i\), \(\xi _j\), \(\xi _k\) such that the cost function of \(\xi _k\) equals the mean of the other two, i.e., \(F(\cdot ,\xi _k) = \tfrac{1}{2} (F(\cdot , \xi _i) + F(\cdot , \xi _j))\). It is then possible to cluster together \(\left\{ \xi _i,\xi _j,\xi _k\right\}\) with weight \(\tfrac{3}{N}\) and representative \(\xi _k\) without changing the solution of the original problem, hence effectively removing two-thirds of the scenarios without introducing any error. It is easy to see that this situation can be generalized to any number of scenarios, as long as there is one scenario (the representative one) with a cost function that can be expressed as the mean of the other ones.
In practice, such reductions will arise with an approximate equality rather than an exact one, which means that some error is likely to be introduced by the clustering. However, if one has the goal to keep this error as low as possible, this motivates the development of a reduction method that clusters scenarios in the space of cost values to spot such similarities that are not apparent to distribution-based methods. The next sections will provide further explanations and illustrate this on a concrete stochastic problem.
4.2 Mathematical developments
In this section, we derive the error bound to be minimized by the CSSC algorithm from the implementation error defined in Eq. (4). To this end, let us first decompose the implementation error as follows:
The second term can be further bounded by:
where for (8) we use the fact that \(\widetilde{f}(\widetilde{x}^*) \le \widetilde{f}(x^*)\) since \(\widetilde{x}^*\) is a minimum of \(\widetilde{f}\), and \(f(x^*)\le f(\widetilde{x}^*)\) since \(x^*\) is a minimum of f.
Finally, by combining (6) and (10) we can bound the implementation error as follows. Let \(\widetilde{X}\subseteq X\) be any feasible set such that \(\{x^*, \widetilde{x}^*\}\subset \widetilde{X}\), that is \({\widetilde{X}}\) includes the two optimal solutions of the original and approximate problems.
The quantity \(D(C_k)\) can be seen as the discrepancy of the cluster \(C_k\). It measures how much the cost function \(F(x,\widetilde{\xi }_k)\) of its representative scenario \(\widetilde{\xi }_k\) matches the average cost values of the whole cluster \(C_k\) over the feasible set \(\widetilde{X}\).
A true measure of discrepancy (in the sense of theoretically valid) would have to consider a set \(\widetilde{X}\) sufficiently large to ensure the validity of the bound, while sufficiently small to guarantee the tightness of the bound. In practice, however, this trade-off will be difficult to resolve. The set \(\widetilde{X}\) would have to include the optimal solutions of the original and approximate problems, which are both unknown at the time of the scenario reduction. A way to bypass this issue would be to consider a larger set that includes any “sensible” solutions, or simply setting \(\widetilde{X}=X\) if one cannot define such a set. However, this would lead to a large set of solutions (possibly infinitely many), which would render the computation of \(D(C_k)\) nearly impossible in practice. Note that computing \(F(x,\xi _i)\) for a single x requires the solution of the 2nd-stage problem, hence it is not free of computational cost.
In order to obtain a usable bound, we propose to consider a set \(\widetilde{X}\) composed of optimal solutions to all of the one-scenario subproblems.
To motivate our choice, consider the problem of identifying the representative scenario \(\widetilde{\xi }_k\) for a given cluster \(C_k\):
For a given solution \(x \in \widetilde{X}\), the function \(\left| \sum \limits _{i\in C_k} F(x,\widetilde{\xi }_k) - F(x,\xi _i) \right|\) can be understood as computing the total predictive error incurred by implementing solution x while anticipating scenario \(\widetilde{\xi }_k\) when a different scenario \(\xi _i\) (for \(i \in C_k\)) occurs, see also Hewitt et al. (2021). As defined in (19), the objective function then aims to find a solution \(x \in \widetilde{X}\), which maximizes this total predictive error, thus defining a worst case value. The optimal representative scenario is then the one which minimizes this worst case value.
If \(\widetilde{X} = X\), one seeks to compute the worst case predictive error value by searching the full solution set. Instead, we propose to apply the subset of solutions \(\widetilde{X} = \{x_1^*, x_2^*, \ldots , x_N^*\} \subset X\), where \(x_{i}^{*} \in {\text{argmin}}_{{x \in X}} \;F(x,\xi _{i} )\), for \(i=1,\ldots ,N\). Now \(x^{\star }_i\) represents an optimal anticipative solution associated with scenario \(\xi _i\), i.e. the optimal solution if scenario \(\xi _i\) is correctly predicted. If there is more than one optimal solution, i.e. if \({\text{argmin}}_{{x \in X}} \;F(x,\xi _{i} )\) contains more than one element, our algorithm chooses an element of \({\text{argmin}}_{{x \in X}} \;F(x,\xi _{i} )\) uniformly at random.
At first glance, there might appear to be an inconsistency of using the single-scenario predictions given the previous discussion about the insufficiency of point predictions in stochastic problems. However, our approach does not use only single-scenario solutions, but rather seeks to minimise the worst-case impact of predicting the wrong scenario. In other words, we look at the difference between single-scenario solutions.
By applying the solution domain restriction \(\widetilde{X} = \{x_1^*, x_2^*, \ldots , x_N^*\} \subset X\), the total predictive error, as defined in the objective function (19), is then computed under the assumption that a consistent predictive model is being used. Specifically, a model which systematically predicts a specific scenario from the considered set \(\{\xi _1, \ldots , \xi _N\}\) that is then used to find the solution to implement. This domain restriction thus provides a cogent approximation for the worst case value evaluated under the more conservative assumption (i.e. when \(\widetilde{X} = X\)).
The set \(\widetilde{X} = \{x_1^*, x_2^*, \ldots , x_N^*\}\) is also easier to obtain since only the single-scenario problems need to be solved. Moreover, it was illustrated in Hewitt et al. (2021) that these solutions could be used to effectively search for commonalities between the scenarios. We thus leverage them here to define the basis on which the discrepancy measure is evaluated. Specifically, we approximate \(D(C_k)\) by:
where \(x_k^* \in \underset{x\in X}{{{\,\textrm{argmin}\,}}}\;F(x,\widetilde{\xi }_k)\).
We observe that Lemma 1 in Pflug (2001) is a special case of the bound (12) that corresponds to the choice \(\widetilde{X}=X\). Under assumptions on the regularity of f, Lemma 1 in Pflug (2001) is then used to bound the left-hand side of (5) in terms of the 1-Wasserstein distance between the empirical measures of the original and the reduced scenario sets. See Eq. (7) in Pflug (2001). Specifically, the required assumption is that the function \(F(\cdot ,\xi )\) that defines f via the optimisation problem (3) is globally Lipschitz (i.e. 1-Hölder continuous), uniformly over all values of \(\xi\).
The next subsection describes the CSSC algorithm in more details and analyze its computational cost.
4.3 Algorithm description
The CSSC algorithm aims to minimize the clustering bound defined in (17) using the discrepancy approximation (20). Overall, it consists in the following two steps:
-
Step 1. Compute the opportunity-cost matrix \(\varvec{V} = (V_{i,j})\) where
$$\begin{aligned} V_{i,j} = F(x_i^*,\xi _j), \qquad \forall i,j\in \left\{ 1,\dots ,N\right\} , \end{aligned}$$(21)where each \(x_i^*\) is the optimal solution of the one-scenario subproblem:
$$\begin{aligned} x_i^* \in \underset{x\in X}{{{\,\textrm{argmin}\,}}}\;F(x,\xi _i), \qquad \forall i\in \left\{ 1,\dots ,N\right\} . \end{aligned}$$(22) -
Step 2. Find a partition of the set \(\left\{ 1,\dots ,N\right\}\) into K clusters \(C_1,\dots ,C_K\) and their representatives \(r_1\in C_1,\dots ,r_K\in C_K\) such that the following clustering discrepancy is minimized:
$$\begin{aligned} \sum _{k=1}^K p_k \left| \frac{1}{\vert C_k\vert } \sum _{j\in C_k} V_{r_k,j} - V_{r_k,r_k} \right| , \end{aligned}$$(23)where \(p_k = \frac{\vert C_k\vert }{N}\).
The first step of the algorithm consists in solving N times the one-scenario subproblem (22), which becomes a deterministic problem, and then evaluating the resulting solutions \(x_i^*\), \(i \in \left\{ 1,\dots ,N\right\}\), with respect to each scenario \(\xi _j\), i.e., computing the values \(V_{i,j} = F(x_i^*,\xi _j)\), \(\forall i,j \in \left\{ 1,\dots ,N\right\}\). In the case where the original problem is two-stage, these evaluations require solving the second-stage problem \(N^2\) times (or more precisely \(N^2 - N\) times, since the values \(V_{i,i}\), for \(i \in \left\{ 1,\dots ,N\right\}\), are already given by (22)). The computational effort to perform these nearly \(N^2\) iterations may seem prohibitive if the problem has integer decisions. However, as we will see in the two case studies in Sects. 5.1 and 5.2, this can be easily worked around by considering the linear relaxation of the problem. Moreover, it should be noted that the scenario clustering method that is developed seeks to group scenarios that exhibit commonalities defined in terms of the problem in which the scenarios are used. Of course, such commonalities can be searched for by directly considering the solutions and their associated costs as defined in the original problem, i.e., the evaluations as stated by (21) and (22). However, this search can also be performed by considering any simplification of the original problem (e.g., either a relaxation or a restriction). If a problem simplification is used to perform the cluster search then the resulting clustering would necessarily be an approximation of the two-step method described above. However, such an approximation may, nonetheless, provide enough accuracy to obtain good-quality clusters. Lastly, it should be highlighted that the first step of the algorithm is completely amenable to be performed via parallel computation. The required time to carry out these evaluations can thus be greatly reduced.
The second step consists in minimizing a measure of clustering error, where the quantity in absolute value can be seen as a goodness of fit for cluster \(C_k\). Minimizing this error pushes the cost function of the representative \(r_k\) (represented by \(V_{r_k,r_k}\)) to fit as much as possible the average cost function of all the cluster’s members (represented by \(\tfrac{1}{\vert C_k\vert } \sum _{j\in C_k} V_{r_k,j}\)). In other words, clusters are created such that, in each case, an elected representative can be identified that best fits the average “view”. It should be noted that this means that two scenarios with very different cost values may still be included in the same cluster if there exists a third scenario whose value provides a mid-ground between them. Consequently, it can be easily shown that the minimization problem (23) is equivalent to solving the mixed-integer program:
The binary variable \(u_j\) determines if scenario \(\xi _j\) is picked as a cluster representative, \(\forall j \in \left\{ 1,\dots ,N\right\}\), while the binary variable \(x_{ij}\) establishes whether or not the scenario \(\xi _i\) is in the cluster with representative \(\xi _j\), \(\forall (i,j)\in \left\{ 1,\dots ,N\right\} ^2\). The first two constraints linearize the absolute value of the objective function (i.e., the goodness of fit for each cluster). The other constraints guarantee that there are exactly K clusters, that each one is non-empty and has a representative that belongs to it.
4.4 Methodology illustration


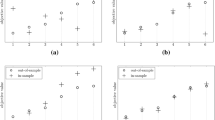
Clustering performed by k-means, k-medoids and the CSSC algorithms for \(K=2\). The representative of each cluster is displayed by a circle and the scenarios lying in the same cluster have the same color and marker
To illustrate the CSSC algorithm and understand why it may provide an improvement over the purely distribution-based approaches, consider the following two-stage stochastic mixed-integer problem with four scenarios:
This problem has one decision variable at stage 0 (x), four decision variables at stage 1 (\(t_1\), \(t_2\), \(y_1\), \(y_2\)), two random parameters (\(\xi _i =(\xi _i^1, \xi _i^2)\)), and four scenarios: \(\xi _1 = (0, 0.9)\), \(\xi _2 = (0, -1)\), \(\xi _3 = (1.1, 0)\) and \(\xi _4 = (-1, 0)\), which are displayed in Fig. 1. Its (unique) optimal solution is \(x^* = 0\) with objective value \(v^* = 1.475\).
Performing the k-means and k-medoids clustering methods on the four scenarios in Fig. 1 for \(K=2\) yields the clusters and representatives displayed in Fig. 2a, b. The k-means method finds two clusters of equal size and the representatives are the barycenters which lie in the middle of the straight line connecting each pair of points. Note that there exists another equivalent partition for k-means (which is not displayed) with the two clusters \(\{\xi _1, \xi _4\}\) and \(\{\xi _2,\xi _3\}\) (equivalence means that both have the same error, so the algorithm might output either one depending on the starting points). The k-medoids algorithm partitions the scenario set into clusters \(\{\xi _2, \xi _3, \xi _4\}\) (represented by scenario \(\xi _2\)) and \(\{\xi _1\}\) (represented by scenario \(\xi _1\)). In the end, regardless of which algorithm is used, we see that the results follow the same pattern: scenarios close to each other in the space of random outcomes are clustered together. Of course, this is not a surprise, because these methods are designed for that purpose.
The CSSC algorithm performed on the same four scenarios yields a completely different result. Solving the problem on each scenario individually, as described in Step 1 of the algorithm, produces the following opportunity cost matrix:
Recall that the (i, j)-element of \(\varvec{V}\) equals \(F(x_i^*, \xi _j)\), i.e., the value of solution \(x_i^*\) evaluated in scenario \(\xi _j\), where \(x_i^*\) is the optimal solution of the deterministic problem built from the individual scenario \(\xi _i\).
Applying now Step 2 of the algorithm, i.e., solving the MIP formulation (24)–(29) for the matrix (36) and \(K=2\), produces the partition and representatives displayed in Fig. 2c. We see that it looks somehow counter-intuitive (at least when we look at it in the space of random outcomes), since it pairs together scenarios that are the furthest away from each other. There is, however, a good reason for that, which lies in the structure of the stochastic problem, and which is reflected in the opportunity cost matrix (36): the first two columns of the matrix have similar values, as well as the last two columns. This means that the cost function \(F(x, \xi _i)\) satisfies:
where \(\{x_1^*, x_2^*, x_3^*, x_4^*\}\) is the set of first-stage solutions computed in (22) for each individual scenarios. This proximity of scenarios in the space of cost values suggests pairing together scenarios \(\{\xi _1, \xi _2\}\) and \(\{\xi _3,\xi _4\}\), even though they appear to be the furthest away in the space of random outcomes. The basis for pairing them together, which was already explained in Sect. 4.1, is that two scenarios \(\xi _i\) and \(\xi _j\) can be merged without error if \(F(x,\xi _i) = F(x,\xi _j)\) for all feasible \(x\in X\). Although in (37) the equality does not hold exactly but only approximately over a subset of feasible solutions, which means that some errors might still be introduced by doing such scenario reduction, we can expect a smaller error to be introduced by following the guidelines provided by the opportunity cost matrix.
This expectation turns out to be true in the specific problem considered here, since the approximate problem solved using the k-means and k-medoids scenarios provide the solutions \(x=0.5\) of true value 2.475 (\(62\%\) away from optimality) and \(x=1\) of true value 2.575 (\(69\%\) away from optimality), respectively, while the CSSC scenarios do provide the actual optimal solution \(x^* = 0\). An exact scenario reduction can thus be achieved for this problem, not by chance, but because of an underlying property hidden in the problem’s objective function and constraints. Indeed, one could see by computing exactly or numerically the cost function \(F(x, \xi )\) for any \(\xi =(\xi ^1,\xi ^2)\in \mathbb {R}^2\) that it approximately satisfies
Thus, F depends on \((\xi ^1, \xi ^2)\) only through the absolute values \((\vert \xi ^1 \vert , \vert \xi ^2 \vert )\). This explains why scenarios at the opposite of each other in Fig. 1 provide similar cost values, and hence can be clustered together. This property is of course invisible for the clustering methods that only work in the space of distributions.
5 Numerical experiments
In this section we apply the CSSC algorithm on two stochastic mixed-integer programs: (1) network design and (2) facility location problems. The goals of the conducted experiments are twofold. Using the stochastic network design programs, we study the problem of scenario reduction in general (i.e., for varying values of K). While in the case of the stochastic facility location programs, we focus on how good a solution with a single scenario can be. Considering a unique scenario means turning the stochastic problem into a deterministic one, which is the path followed by many decision-makers when the problem becomes too hard to be solved as a stochastic one. The facility location problem, which has a number of second stage integer decisions typically several orders of magnitude larger than the one in the first stage, makes a good candidate for such extreme scenario reduction. Our computational experiments will show that, in this situation, the CSSC algorithm also provides a valuable deterministic scenario estimate that outperforms estimates based on the scenarios alone.
All experiments in this section are implemented for Python 3.7 and the mixed-integer problems are solved using CPLEX Optimization Studio version 12.9 via its Python API. The network design problem is solved on a Windows 10 computer with 4 cores @2.11GHz 16GB RAM, and the facility location problem is solved on a Windows 10 computer with 6 cores @3.2GHz 32GB RAM.
We compare the CSSC algorithm to several clustering methods, which are all available open-source. The k-means algorithm is implemented in the scikit-learn library (Pedregosa et al. 2011). The k-medoids and k-medians implementations are those of the pyclustering library (Novikov 2019). For the k-modes algorithm, we refer to de Vos (2021).
5.1 Network design problem
We first consider a stochastic network design problem, where a number of commodities are to be transported across a network that has to be designed before the demand of these commodities is known. The instances were inspired by, and are similar to those studied in Crainic et al. (2011). We note that in Section 5 of that paper, stability was demonstrated. The problem is formulated as a two-stage model. In the first stage, the decisions about the structure of the network are made (i.e., which arcs are opened and which are closed) Then, the stochastic demands are revealed and, based on them, the second-stage decisions of commodity flows in the network are made. Considering its wide applicability, ranging from supply chain management, e.g., Santoso et al. (2005), to network telecommunication planning, e.g., Riis and Andersen (2002), there has been a steady stream of research dedicated to the development of solution methods for this problem, see Crainic et al. (2014) and Rahmaniani et al. (2018) for examples of general heuristics and an exact method, respectively. However, considering their combinatorial nature, these problems remain extremely challenging to solve, especially when considering large networks and a high number of scenarios used to define the formulation.
5.1.1 Two-stage model for the network design problem
Our setting is therefore the complete directed graph \(G=(V,A)\) on a finite set of nodes V, across which commodities from a set C must be transported. Each arc \(a\in A\), pointing from \(a(0)\in V\) to \(a(1)\in V\), has a total capacity \(u_a\) if it has been opened for a fixed cost \(c_a\). The cost of transporting one unit of commodity \(c\in C\) across arc \(a\in A\) is denoted by \(q_{ac}\).
Each commodity \(c\in C\) has a unique origin vertex \(o(c)\in V\) and destination vertex \(\delta (c)\in V\), between which a quantity \(v_c^i\) of c must be transported under scenario i. For any vertex \(v\in V\), commodity \(c\in C\) and scenario i we now define
The first-stage decision of opening the arc \(a\in A\) is denoted by \(x_a\), which can take two values: 0 if the arc is closed and 1 if it is open. The second stage decision \(y^i_{ac}\) is the number of units of commodity \(c\in C\) transported across arc \(a\in A\) under scenario i. This problem is solved using the following two-stage stochastic formulation:
The goal of the problem is to satisfy all demands while minimizing the expected total cost incurred, objective function (40), which includes the fixed cost of opening the arcs plus variable cost of transporting the commodities across the network. The constraints (41) are the flow conservation requirements imposed for each vertex of the network, for each commodity and for all scenarios. The capacities associated with the arcs, which limit the total amount of commodity flow that can be transported through them under each scenario, are enforced through the inclusion of constraints (42). Finally, constraints (43) impose the necessary integrality and non-negativity requirements on the decision variables. We refer to Fig. 3 for an illustration of first and second stage decisions for a network with 4 commodities, 9 vertices and 68 arcs.

First and second stage decisions for a network design problem with 4 commodities, 9 vertices, and 68 arcs. The commodities are transported from the origins \(\{0, 1\}\) to the destinations \(\{7, 8\}\) passing through intermediate vertices \(\{2, 3, 4, 5, 6\}\). Each pair Origin \(\rightarrow\) Destination is a commodity whose random demand is displayed at the top right corner of the network. For instance in (b) demands are: \(0 \rightarrow 7: 11\), \(0 \rightarrow 8: 15\), \(1 \rightarrow 7: 40\), \(1 \rightarrow 8: 13\)
Infeasibilty in the second is avoided (and relatively complete recourse assured) by the inclusion of a direct arc connecting all origin–destination pairs of commodities \(c\in C\). Thus, for all \(c\in C\) there exists an accessible arc that connects o(c) to \(\delta (c)\), for which the cost is higher.
5.1.2 Numerical results for the network design problem
To test the CSSC algorithm, we generate randomly two batches of instances, independently from each other. The first one contains 25 instances of a network with 49 commodities, 763 arcs, and 25 demand scenarios drawn from a discrete uniform distribution in U(0, 10). The second batch contains 100 instances of a network with 9 commodities, 132 arcs and 75 scenarios sampled from a log-normal distribution with parameters \(\mu =\sigma =1\) (which is then rounded-off to the nearest integer). Each instance is generated by sampling the (deterministic) parameters \(q_{ac}\), \(c_a\), \(u_a\) independently and uniformly from fixed sub-intervals of the integers (\(q_{ac}\sim U[5,10]\), \(c_a\sim U[3,10]\), \(u_a\sim U[10,40]\)).
Four comparison methods are considered for this problem: k-means, k-medoids, k-medians and Monte Carlo sampling. For each one, the approximate problem (3) is solved for a reduced number of scenarios \(K=2,\dots ,10\). The resulting optimal solution is then evaluated in the original problem to assess its true value and the gap with the optimal value of the original problem. Recall that this corresponds to computing the implentation error as defined in (4)).
The implementation error thus serves as the quality measure to compare the methods. Note that this error is always expressed in percentage of the original optimal value to allow comparison between different instances.
The results are displayed as violin plots in Fig. 4 for the instances with 25 scenarios and in Fig. 5 for the instances with 75 scenarios. The violin plots display the distribution of error. The top line is the instance with the largest error, the bottom line the instance with lowest error. The line inside that range correspond to the mean of the distribution.
It appears clearly from these figures that the CSSC algorithm outperforms all the other comparison methods on every single clustering size for \(K=2\) to \(K=10\). For \(K=10\), the median error becomes extremely close to zero and is several times smaller than even the minimal error of the other methods. To quantify more precisely how many instances are solved with little error, we show in Tables 1 and 2 the percentage of instances solved with less than 10% and 2% error. For the instances with 25 scenarios and uniform stochastic demands, we see that more than 90% of instances are solved with less than 10% error by CSSC and about 50% with less than 2% error. The second best method, Monte Carlo, only achieves 60 and 16%, respectively, on those instances. The situation is similar for the instances with 75 scenarios and lognormal stochastic demands: 86% of instances are solved with less than 10% error and about 50% with less than 2%, against 36 and 16%, respectively, for the second best method (k-means in that case).

Implementation error (in percentage) for the instances of the network design problem with 25 scenarios. The comparison is on the range \(K=2,\dots ,6\) (top) and \(K=7,\dots ,10\) (bottom)

Implementation error for the instances of the network design problem with 75 scenarios. The comparison is over all methods on the range \(K=2,\dots ,6\) (top) and only between CSSC and k-means on the range \(K=6,\dots ,10\) (bottom) because the other methods have much larger errors on that range
Now that we have seen that the CSSC algorithm is best at selecting a reduced set of scenarios to solve the network design problem, it is interesting to study the properties of those scenarios selected by CSSC but not by the other methods. To this end, we focus on the statistics of the total demand in the network, i.e., \(\sum _{v,c} d_{vc}^{i}\). Surprisingly, we observe that the scenarios of the CSSC algorithm are the worst at matching the mean of the total demand, as displayed at the top of Fig. 6, which displays the difference between the statistic of the original set of scenarios and the reduced one. Indeed, while k-means matches it perfectly (which explains why no box is apparent), and the other methods are close to a perfect match within some statistical errors, the CSSC algorithm completely overestimates the mean demand in the network for every single instance. The other moments (variance, skewness and kurtosis, displayed in Fig. 7) are also not properly matched by the scenarios of the CSSC algorithm, although the differences in those cases are less dramatic.. Of course, this observation is limited to the specific problem considered here, and is not evidence that the moments of the distribution should not be matched, but rather that matching them may not always be necessary to achieve good approximation results.

(Top) Difference in percentage between the mean total demand in the reduced set of scenarios and in the original one. (Bottom) Difference in percentage between the standard deviation of the total demand in the reduced set of scenarios and in the original one. This is given for the instances with 75 scenarios

Difference between the statistic of the reduced set of scenarios and in the original one for the skewness (top) and the kurtosis (bottom) of the total demand in the network for the instances with 75 scenarios
As for the computational times to run the CSSC algorithm, the first step of the algorithm (computation of the opportunity cost matrix) takes between 18 and 45 s (mean: 23 s) for the instances with 25 scenarios and between 4 and 11 s (mean: 8.2 s) for the instances with 75 scenarios. The latter takes less time despite the higher number of scenarios because the network is smaller in that case. Note that we have not used any parallelization scheme to speed up the computation. We also recall that the opportunity cost matrix is computed only once per instance, and not for each value of K used in the clustering. As for the second step (solution of the MIP partitioning problem), it takes always less than 1 s for 25 scenarios and between 2 and 4 s (mean: 2.9 s) for 75 scenarios. Finally, these computation times are fairly constant over the range of tested K.
5.2 Facility location problem
This two-stage problem consists in locating facilities over a set of predefined positions and assigning them to randomly present customers. The decision of positioning (or not) a facility at some location is made at the first stage, before knowing how many customers will be present and where. Then, the scenario of customers presence is revealed and, based on it, the facilities are matched to the customers in the most cost-efficient way. Considering that in this problem setting, the second-stage decisions are in part discrete, the overall problem to solve is extremely computationally intensive and challenging. In these experiments we thus demonstrate the value of our approach when the complexity of the problem only allows for a very small number of scenarios. In fact, we consider the situation where it is only possible to choose one scenario.
5.2.1 Two-stage formulation of the facility location problem
The facility location problem has been well-studied in the literature in its deterministic form (e.g., in Guha and Khuller (1999); Li (2013), among many others) and to a much smaller extent in a stochastic version with random customers demand (e.g., Bieniek (2015); Baron et al. (2008)). The problem that we consider here does not feature random demand but random presence of customers. The following formulation is inspired by that of Ntaimo and Sen (2005) where the problem is referred to as the server location problem.
The mixed integer problem has binary first and second stage decisions. We denote by F and C the sets of predefined positions for the facilities and customers, respectively, which are represented by squares and circles in Fig. 8. The first stage variable \(x_f\) can take two values: 1 if a facility is chosen to be located at position \(f\in F\) and 0 otherwise. Located facilities are represented by filled squares on the figure, while hollow squares are positions left empty. The location of a facility induces a cost \(c_f\). Each facility has up to u units of resources that are used to provide service to the customers. Also, we consider that at most v facilities can be opened overall.
The presence of a customer at position c in scenario i is given by a binary random parameter \(h_{c}^{i}\). When present, customer c consumes \(d_{cf}\) units of resources from the facility f to which it is connected. Each occupied customer position is represented by a filled circle in panels (b)–(c) in Fig. 8. The second stage binary variable, \(y_{cf}^{i}\), is the scenario-dependent decision of matching the facility at position f with the customer at position c in scenario i. The cost incurred by this matching is \(q_{cf}\). These matching decisions are represented by the links between squares and circles in panels (b)–(c) in Fig. 8. Finally, if the total resources of facility f is insufficient to provide service to all the customers c matched to it, then \(z_{f}^{i}\) defines the scenario-dependent decision representing the additional amount of capacity that is required. In this case, a unit cost of \(b_f\) is imposed for each additional unit of capacity.

Illustration of the first-stage decisions (location of facilities) and second-stage decisions (assignment to randomly present customers) for a facility location problem with 15 facilities (squares) and 75 customers (circles)
The two-stage problem is formulated as follows:
The objective function (44) is composed of three terms, which from left to right are: the cost of locating facilities, the cost of matching facilities to customers, and the penalty for exceeding the facilities capacity. The last two are averaged over the N scenarios since the decisions are scenario-dependent (but not the parameters). As for the constraints, (45) enforces the upper bound on the total number of facilities being located. Constraints (46) measure the deviations from the capacities of the facilities \(f \in F\) in the scenarios \(i \in \left\{ 1,\dots ,N\right\}\) through the slack variables \(z_{f}^{i}\), which are then penalized in the objective function. Constraints (47) guarantee that, for each facility location \(f \in F\), the slack variables are zero if the facility is not located (via a big-M constraint), which are necessary to ensure that no customer will be matched to it. To enforce that exactly one facility is assigned to a customer if the latter is present in scenario \(i \in \left\{ 1,\dots ,N\right\}\), constraints (48) are included in the model. Finally, constraints (49) impose the necessary integrality and non-negativity requirements on the decision variables.
5.2.2 Numerical results for the facility location problem
We consider 10 randomly-generated instances of the problem where each instance has 100 and 1000 possible locations for the facilities and the clients, respectively. These locations are independently sampled from a uniform distribution in \([0,1]^2\). Each instance has a set of 100 scenarios of client presence, which are sampled in two steps: first, 100 random numbers \(p\in (0.2,0.8)\) are independently sampled from a uniform distribution, then each number is used as the parameter of a Bernoulli distribution \(\mathcal {B}(p)\) from which the presence of the 1000 clients is sampled. In other words, we have \(h_{c}^{i} \sim \mathcal {B}(p_i)\) for each \(c\in K\) with \(p_i\sim U(0.2,0.8)\) for all \(i\in \left\{ 1,\dots ,N\right\}\). The purpose of randomly generating the Bernoulli parameter p, as opposed to setting a fixed one, is to increase the variability of customers across the scenarios, since for 1000 possible locations a fixed parameter p will typically result in all scenarios having roughly the same number of customers (about 1000p), while a uniformly sampled \(p\in (0.2,0.8)\) will produce scenarios with a range of about 200 to 800 customers.
The other parameters are either constant or picked randomly to create different instances (and then fixed while the instance is solved using the different methods): \(c_f\) is uniform in the range [40, 80], \(b_f\) is set to 1000, v is set to the number of facility locations, u is uniform in the range [30, 60], and \(d_{cf}\) and \(q_{cf}\) are given by the distance between client c and facility f.
For this number of scenarios (100), customers (1000), and facilities (100), each instance of the problem has about 10 million binary variables. This makes the solution of the original mixed-integer problem highly challenging even for a top-notch commercial solver, which on the full problem with 100 scenarios could only reach a gap of 8% to 15% within 6 h of computation (see left column of Table 3). For most of the instances (7 out of 10), the computation even stopped before the time limit due to a lack of memory in the branch-and-bound process (see left column of Table 4).
In an effort to quickly obtain a feasible solution, we consider solving the problem in a deterministic form, i.e. using a single scenario provided by the following scenario reduction methods: CSSC, k-medoids, k-modes, and Monte Carlo. All these methods have in common that the scenario they output remains in a binary format, which is necessary to have a sensible facility location problem (a fractional presence of customers in constraint (47) will lead to an unfeasible problem). The deterministic one-scenario problem is then solved twice with different time limits (300 and 600 s) and the solution is evaluated in the original problem with 100 scenarios to assess its true value. The solution obtained in the best of the two runs is the one displayed in Table 3, where the gaps (which by definition range from 0 to 100%) are computed with respect to the bound that was obtained when solving the original problem.
We see that the CSSC algorithm is the only method that provides solutions with consistently low error (less than 3%), which is significantly less than the error made after 6 h of solving the original problem. By comparison, k-medoids and Monte Carlo manage to find a good quality solution for only one and two instances out of 10, respectively, and k-modes could not output a single solution with a gap less than 90%. This extremely bad results of k-modes could be explained by the fact that it is the only method outputting scenarios that are not in the original set.
The computational times to run the CSSC algorithm are very modest as compared to the time spent solving the original problem, as seen in Table 4 where we display the longest of the two runs. In fact, it takes generally less than 30 min for the algorithm to go through all the different steps: computation of the opportunity cost matrix (column “step 1”), solution of the MIP partitioning problem (column “step 2”), solution of the approximate problem (column “approx.”), and evaluation of the solution in the original problem (column “eval.”). We also stress that the computation of the opportunity cost matrix was done on the linear relaxation of the problem, but without parallelization, so the times could be further improved.
Finally, to evaluate more precisely the ability of the CSSC method to single out what appears to be some of the best scenarios out of the batch of 100 of them, we have solved the 10 instances on each one of the 100 scenarios individually (hence a total of 1000 one-scenario problems). This way we want to make sure that we are not facing a situation where the majority of scenarios would be appropriate to build the approximate problem. In fact, the results displayed in Fig. 9 show the opposite: the vast majority of scenarios are completely unsuitable to approximate the original problem, as only a few percent of the scenarios (about 2–3%) lead to a problem with less than 5% error gap (see the circle at the bottom right of the figure). The CSSC algorithm was able to always select one of them. More specifically, over the ten instances it selected the best scenario six times, the second best twice and the third best twice as well.

Distribution of optimality gaps across the 100 scenarios and 10 instances of the facility location problem. All scenarios provided by the CSSC algorithm lie in the bottom-right blue part of the distribution
6 Conclusion
We have developed a new scenario reduction algorithm that can select appropriately a subset of scenarios when the original stochastic problem is too large to be solved using all of them. This algorithm works directly with the scenario data (no underlying probability distribution is needed), and it uses the problem itself to define a measure of proximity between scenarios. This means that no arbitrary metric in the space of random outcomes must be specified; it is actually the cost function of the problem that provides this metric, which is then used to cluster the scenarios together, select some representatives, and assign them probabilities. For this reason the clustering algorithm is said to work in the space of cost values (\(\mathbb {R}\)) as it has no view of the original space (\(\mathbb {R}^d\)) in which the scenarios are expressed.
We have tested this new algorithm on two stochastic mixed-integer problems: a network design and a facility location problem. In both cases, the cost space scenario clustering (CSSC) algorithm largely outperforms the other methods that cluster scenarios based on their proximity in the space of random outcomes. For instance, in the network design problem, results show that with only 10 scenarios out of 75, the CSSC algorithm solves more than 85% of instances with less than 10% error, as opposed to a mere 36% for the second best tested method, and only 1% for random selection via Monte Carlo sampling. For the facility location problem, all instances are better solved with a single scenario provided by the CSSC algorithm (in less than 40 min) than for the actual original problem with 100 scenarios solved for 6 h.
In a future work, we will investigate several modifications of our algorithm. For example, our algorithm currently selects one of the optimal anticipative solutions with respect to each scenario (see (19) and the discussion following it). Instead, we could choose a subset of optimal solutions, or indeed even of high-quality feasible solutions. Finally, one can look at risk-adjusted versions of the algorithm, leaning on the ideas around conditional variance at risk. Although at first glance many of these risk measures do not appear to fit into our framework (because we require X to be deterministic), we refer to Schultz and Tiedemann (2006) for a reformulation of several of these measures in terms of stochastic programs.
Better performance results should be traded-off against a larger computational cost induced by the CSSC algorithm as compared to other clustering methods that do not account for the problem. One direction of future research goes towards reducing this additional cost. For instance, the computation of the opportunity cost matrix could be done using a relaxation of the problem (linear or other relaxations). Also, the solution of one problem could be used as an initial start for the other problems to be solved, as problems may only slightly change from one iteration to the next. As for the mixed-integer partitioning problem, it can be solved to optimality fairly quickly when the number N of scenarios is less than 100. In the range of 100–300 scenarios, we saw from additional experiments that some instances can take much longer to reach optimality. When the number of scenarios is large (say \(N\ge 500\)), we would advise to develop a heuristic approach to solve it approximately rather than to global optimality as we did in this paper. Finally, another direction of research would be to generalize the clustering criterion to multistage problems. In particular, it would be interesting to investigate how alternative distance measures—such as the ones developed in Pflug (2001)—could be applied and leveraged to obtain new bounds.
References
Arthur D, Vassilvitskii S (2006) k-means++: the advantages of careful seeding. Technical Report 2006-13, Stanford InfoLab. http://ilpubs.stanford.edu:8090/778/
Baron O, Berman O, Krass D (2008) Facility location with stochastic demand and constraints on waiting time. Manuf Serv Oper Manag 10(3):484–505
Bengio Y, Frejinger E, Lodi A, Patel R, Sankaranarayanan S (2019) A learning-based algorithm to quickly compute good primal solutions for stochastic integer programs. CoRR arXiv:1912.08112
Bertsimas D, Mundru N (2022) Optimization-based scenario reduction for data-driven two-stage stochastic optimization. Oper Res. https://doi.org/10.1287/opre.2022.2265
Bieniek M (2015) A note on the facility location problem with stochastic demands. Omega 55:53–60
Birge JR (1982) The value of the stochastic solution in stochastic linear programs with fixed recourse. Math Program 24:314–325
Birge JR, Louveaux F (2011) Introduction to stochastic programming, 2nd edn. Springer, New York
Chen M, Mehrotra S, Papp D (2015) Scenario generation for stochastic optimization problems via the sparse grid method. Comput Optim Appl 62(3):669–692
Crainic TG, Fu X, Gendreau M, Rei W, Wallace SW (2011) Progressive hedging-based metaheuristics for stochastic network design. Networks 58(2):114–124
Crainic TG, Hewitt M, Rei W (2014) Scenario grouping in a progressive hedging-based meta-heuristic for stochastic network design. Comput Oper Res 43:90–99
de Vos NJ (2015) kmodes categorical clustering library. https://github.com/nicodv/kmodes
Dupačová J, Gröwe-Kuska N, Römisch W (2003) Scenario reduction in stochastic programming an approach using probability metrics. Math Program Ser A 95:493–511
Dyer M, Stougie L (2006) Computational complexity of stochastic programming problems. Math Program Ser A 106(3):423–432
Elmachtoub AN, Grigas P (2022) Smart ‘predict, then optimize’. Manag Sci 68(1):9–26
Fairbrother J, Turner A, Wallace SW (2019) Problem-driven scenario generation: an analytical approach for stochastic programs with tail risk measure. Math Program 2019:1–42
Feng Y, Ryan SM (2016) Solution sensitivity-based scenario reduction for stochastic unit commitment. Comput Manag Sci 13(1):29–62
Guha S, Khuller S (1999) Greedy strikes back: improved facility location algorithms. J Algorithms 31(1):228–248
Han J, Pei J, Kamber M (2011) Data mining: concepts and techniques. Elsevier, Amsterdam
Heitsch H, Leövey H, Römisch W (2016) Are Quasi-Monte Carlo algorithms efficient for two-stage stochastic programs? Comput Optim Appl 65(3):567–603
Henrion R, Küchler C, Römisch W (2009) Scenario reduction in stochastic programming with respect to discrepancy distances. Comput Optim Appl 43:67–93
Henrion R, Römisch W (2018) Problem-based optimal scenario generation and reduction in stochastic programming. Math Program. https://doi.org/10.1007/s10107-018-1337-6
Hewitt M, Ortmann J, Rei W (2021) Decision-based scenario clustering for decision-making under uncertainty. Ann Oper Res. https://doi.org/10.1007/s10479-020-03843-x
Higle JL, Sen S (1991) Stochastic decomposition: an algorithm for two-stage linear programs with recourse. Math Oper Res 16(3):650–669
Ho N, Nguyen X, Yurochkin M, Bui HH, Huynh V, Phung D (2017) Multilevel clustering via wasserstein means. In: International Conference on Machine Learning, pp 1501–1509
Huang Z (1998) Extensions to the k-means algorithm for clustering large data sets with categorical values. Data Min Knowl Discov 2(3):283–304
Høyland K, Kaut M, Wallace SW (2003) A heuristic for moment-matching scenario generation. Comput Optim Appl 24(2–3):169–185
Høyland K, Wallace SW (2001) Generating scenario trees for multistage decision problems. Manag Sci 42(2):295–307
Jain AK, Dubes RC (1988) Algorithms for clustering data. Prentice-Hall Inc, Upper Saddle River, NJ
Kantorovich LV (1939) Mathematical methods of organizing and planning production. Manag Sci 6(4):366–422
Kaut M (2012) Scenario-tree generation. In: King AJ, Wallace SW (eds) Modeling with stochastic programming. Springer, New York, pp 77–102
Keutchayan J, Gendreau M, Saucier A (2017) Quality evaluation of scenario-tree generation methods for solving stochastic programming problems. Comput Manag Sci 14(3):333–365
Keutchayan J, Munger D, Gendreau M (2020) On the scenario-tree optimal-value error for stochastic programming problems. Math Oper Res 45(4):1572–1595
King AJ, Wallace SW (2012) Modeling with stochastic programming. Springer, New York
Kleywegt AJ, Shapiro A, Homem-de-Mello T (2002) The sample average approximation method for stochastic discrete optimization. SIAM J Optim 12(2):479–502
Li S (2013) A 1.488 approximation algorithm for the uncapacitated facility location problem. Inf Comput 222:45–58
Luedtke J, Ahmed S (2008) A sample approximation approach for optimization with probabilistic constraints. SIAM J Optim 19(2):674–699
Novikov A (2019) PyClustering: data mining library. J Open Source Softw 4(36):1230. https://doi.org/10.21105/joss.01230
Ntaimo L, Sen S (2005) The million-variable “march’’ for stochastic combinatorial optimization. J Glob Optim 32(3):385–400
Pedregosa F, Varoquaux G, Gramfort A, Michel V, Thirion B, Grisel O, Blondel M, Prettenhofer P, Weiss R, Dubourg V, Vanderplas J, Passos A, Cournapeau D, Brucher M, Perrot M, Duchesnay E (2011) Scikit-learn: machine learning in Python. J Mach Learn Res 12:2825–2830
Pflug GC (2001) Scenario tree generation for multiperiod financial optimization by optimal discretization. Math Program 89(2):251–271
Pflug GC, Pichler A (2015) Dynamic generation of scenario trees. Comput Optim Appl 62(3):641–668
Prochazka V, Wallace SW (2020) Scenario tree construction driven by heuristic solutions of the optimization problem. Comput Manag Sci 17:277–307
Rahmaniani R, Crainic TG, Gendreau M, Rei W (2018) Accelerating the benders decomposition method: application to stochastic network design problems. SIAM J Optim 28(1):875–903
Rahmaniani R, Crainic TG, Gendreau M, Rei W (2018) Accelerating the benders decomposition method: application to stochastic network design problems. SIAM J Optim 28(1):875–903
Riis M, Andersen KA (2002) Capacitated network design with uncertain demand. INFORMS J Comput 14(3):247–260
Rockafellar RT, Wets RJ-B (2009) Variational analysis, vol 317. Springer, New York
Rujeerapaiboon N, Schindler K, Kuhn D, Wiesemann W (2018) Scenario reduction revisited: fundamental limits and guarantees. Math Program 2018:1–36
Römisch W (2009) Scenario reduction techniques in stochastic programming. In: Watanabe O, Zeugmann T (eds) Stochastic algorithms: foundations and applications. Springer, Berlin, Heidelberg, pp 1–14
Santoso T, Ahmed S, Goetschalckx M, Shapiro A (2005) A stochastic programming approach for supply chain network design under uncertainty. Eur J Oper Res 167(1):96–115
Schubert E, Rousseeuw PJ (2019) Faster k-medoids clustering: improving the pam, clara, and clarans algorithms. In: International Conference on Similarity Search and Applications, Springer, pp 171–187
Schultz R, Tiedemann S (2006) Conditional value-at-risk in stochastic programs with mixed-integer recourse. Math Program 105(2):365–386
Shapiro A, Homem-de-Mello T (2000) On the rate of convergence of optimal solutions of Monte Carlo approximations of stochastic programs. SIAM J Optim 11(1):70–86
Shapiro A (2003) Monte Carlo sampling methods. In: Ruszczyński A, Shapiro A (eds) Handbooks in operations research and management science: stochastic programming, vol 10. Elsevier, Amsterdam, pp 353–425
Sun M, Teng F, Konstantelos I, Strbac G (2018) An objective-based scenario selection method for transmission network expansion planning with multivariate stochasticity in load and renewable energy sources. Energy 145:871–885
Wallace SW (2010) Stochastic programming and the option of doing it differently. Ann Oper Res 177(1):3–8
Acknowledgements
This research was initiated when Julien Keutchayan was postdoctoral researcher at University of Montreal. Janosch Ortmann was partially supported by a NSERC Discovery Grant. While working on this paper, Walter Rei was the Canada Research Chair (CRC) in Stochastic Optimization of Transport and Logistics Systems. In addition, he was supported by the National Sciences and Engineering Research Council of Canada (NSERC) through the discovery grants program. He gratefully acknowledges all the support that is provided by the CRC and NSERC programs.
Author information
Authors and Affiliations
Corresponding authors
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Keutchayan, J., Ortmann, J. & Rei, W. Problem-driven scenario clustering in stochastic optimization. Comput Manag Sci 20, 13 (2023). https://doi.org/10.1007/s10287-023-00446-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10287-023-00446-2