
Abstract
Neurophysiological monitoring is of undoubted value for the intraoperative safety of neurosurgical procedures. Widely developed and used for cranial surgery, it is equally as effective, though perhaps less commonly employed, for spinal pathology. The most frequently used techniques for intraoperative monitoring during spinal surgery include somatosensory evoked potentials (SSEPs), motor evoked potentials (MEPs) and electromyography, which can either be spontaneous free-running (sEMG) or triggered (tEMG). The knowledge of the benefits and limitations of each modality is essential in optimising the value of intraoperative monitoring during spinal procedures. This review will analyse the single techniques, their anatomical and physiological basis, their use in spinal surgery as reliable indicators of functional injury, their limits and their application to specific procedures in minimally invasive surgery, such as the lateral transpsoas access for interbody fusion and the divergent trajectory for cortico-pedicular screws. In these particular techniques, because of reduced visual exposure, neuromonitoring is indeed essential to exploit the full potential of minimally invasive surgery, while avoiding damage to nervous structures.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Neurophysiological monitoring is of undoubted value for the intraoperative safety of neurosurgical spinal procedures. In oncologic surgery, as well as in the treatment of degenerative spine conditions, several techniques have developed to help the surgeon preserve the numerous nervous structures that could be damaged temporarily or permanently, severely conditioning the clinical outcome of the procedure.
Moreover, with the improvement of technologies [49] and of anatomical knowledge, the principle of ‘minimally invasive’ in spine surgery arose [62], in response to various problems related to traditional approaches. A reduced anatomical exposure entails a greater risk of injury to nervous structures [61]. Therefore, the use of intraoperative neuromonitoring becomes a fundamental aid for the surgeon, who most of the times does not have visual access to the nervous roots and would therefore not be able to recognise in real time direct or indirect damage that could cause a postoperative deficit.
Robust class I medical evidence supports the use of electrophysiological monitoring as a diagnostic adjunct to assess spinal cord integrity in the perioperative setting [19]. The most frequently used techniques for intraoperative monitoring during spinal surgery include somatosensory evoked potentials (SSEPs), motor evoked potentials (MEPs) and electromyography, which can either be spontaneous free-running (sEMG) or triggered (tEMG).
The use of such technologies requires qualified personnel both for the practical realisation of the monitoring and for its interpretation. As for all techniques, neuromonitoring is not immune to the limits of sensitivity and specificity. All intraoperative data must always be interpreted based on the operative setting and on the specific surgical procedure and manoeuvres, through constant and direct interaction between the surgeon and the neurophysiologist [52, 53]. This is crucial to make the technique reliable and, most of all, of concrete support, justifying its obvious costs.
This review is broken up into two sections: one discusses the single techniques, their anatomical and physiological basis, their use in spinal surgery as reliable indicators of functional injury and their limits; another one discusses their application to specific procedures in minimally invasive surgery, such as the lateral transpsoas access for interbody fusion and the divergent trajectory for cortico-pedicular screws. In these cases particularly, the use of neuromonitoring is of crucial importance to minimise neurological risks and also to minimise the need for fluoroscopy.
Literature search criteria
The terms ‘spine surgery’, ‘neurophysiological monitoring’, ‘somatosensory evoked potentials’, ‘motor evoked potentials’, ‘EMG’, ‘cost’, ‘minimally invasive spine surgery’, ‘transpsoas lateral access’ and ‘cortical bone trajectory’ were used as keywords to query the MEDLINE database. Both abstracts and full-text reports were reviewed. Case reports were excluded. Expert opinion was sought from academic spine surgeons specialising in minimally invasive techniques, deformity surgery, and intradural surgery, as well as neuroanesthesiologists and neuromonitoring specialists.
Techniques
Somatosensory evoked potentials
Somatosensory evoked potentials (SSEPs) represent the first intraoperative neurophysiological aid in the history of spinal surgery, being in use since the 1970s [36]. They were first introduced in the surgical treatment of spine deformity and provide monitoring of the dorsal column-medial lemniscus pathway, which mediates tactile discrimination, vibration sensation, form recognition and joint-muscle sensation [11].
SSEPs monitoring of the upper limbs usually involves the stimulation of the median nerve or of the ulnar nerve at the wrist [59]. Alternatively, both these nerves can be stimulated at the elbow. The radial nerve can be stimulated at the hand. As for the lower limbs, the posterior tibial nerve is typically stimulated at the ankle; an alternative stimulation site is the popliteal fossa. The peroneal nerve can be stimulated near the head of the fibula.
Anatomical pathways
For the lower limbs, the popliteal potential is generated at the popliteal fossa. Ascending, the peripheral nerves join first in the lumbosacral plexus and then in the cauda equina, where the lumbar potential is generated (N21 potential). The anatomical pathways of tactile and proprioceptive sensitivity that are normally monitored, then continue for the most part in the dorsal columns of the spinal cord, finally reaching the cerebral cortex, where the P37/P40 potential is registered [55]. The popliteal and lumbar potentials are often difficult to register, particularly in obese patients.
In the upper limbs, the first potential that can be registered corresponds to the brachial plexus, at the level of so-called Erb’s point. Subsequently, at the level of the dorsal columns, peripheral stimulation yields the N13 potential. The anatomical pathway then continues, after synapsing in the gracile and cuneatus nuclei, into the medial leminiscus and then in the thalamus, where part of the N20 potential is generated. Finally, at cortical level, the N20 and N22 potentials are registered [59].
SSEP intraoperative interpretation and use
SSEPs have low amplitude and require long acquisition time, because of the need for averaging [55]. Depending on the background noise, 10 s to 2 min might occur to notice a significant change in the graph. SSEPs explore the integrity of the dorsal columns and are therefore inadequate to assess the functional integrity of motor pathways. Moreover, in the case of myelopathy (frequent occurrence in cervical surgery) or polyneuropathy, SSEPs might be unreliable (because of low-quality) or undetectable (actually absent). During spinal cord surgery, SSEPs are frequently lost at the time of myelotomy [12].
A reduction of more than 50% of the amplitude or an increase of at least 10% of the latency of the registered potential are typically considered significant. The interpretation of such alterations is influenced by many factors, such as the type of surgical procedure, the preoperative neurophysiological integrity of the patient, and the operator-dependent reading of the graph [56]. Because of the relatively high number of synapses throughout the anatomical pathway to the cortical registration of the signal, anaesthesia can also affect the reliability of SSEPs [55].
During spinal cord surgery, the use of SSEPs and direct spinal stimulation can be very helpful for identifying the exact position of the midline and, therefore, perform a more accurate myelotomy [25].
During spinal surgery, the information given by SSEPs monitoring is of great importance in posterior decompression procedures (Fig. 1) and, in general, whenever a surgical instrument is used beneath the posterior laminae (e.g. to remove them). In these instances, motor evoked potentials cannot be of substantial help, since the integrity of motor pathways, placed more anteriorly in the spinal cord, is not at direct risk [29].

SSEPs during dorsal meningioma removal. Young woman with D5–D6 meningioma compressing the spinal cord. No right lower limb SSEPs at the beginning of the procedure. At 12:53, during decompression, progressive reappearance of P40 wave; normal waveform at the end of the procedure (13:06)
Nuwer et al. in 1995 [37] reported on results of a multicentre survey of members of the Scoliosis Research Society. This survey yielded 51,263 cases in which SSEPs were used as the sole mode of neuromonitoring, with a sensitivity of 92% and a specificity of 98% for new postoperative motor deficits. More recently, others have reported lower sensitivities ranging from 0 to 52%, with specificities ranging from 95 to 100% [26]. Overall, we can argue that SSEPs are highly specific, but not very sensitive for monitoring of spinal surgical procedures.
Motor evoked potentials
Over the course of the last 30 years, transcranial motor evoked potentials (TcMEPs) have gained an irreplaceable role, being extremely efficient and reliable for intraoperative monitoring in spinal surgery. Direct monitoring of the corticospinal tract was described by Merton and Morton in 1980, who first illustrated transcranial magnetic stimulation of the motor cortex [32]. Since then, the technique has been progressively refined, defining the importance of the type of anaesthesia for successful registration, the possibility of epidural or electromyographic registration, the best type of stimulus and most importantly the interpretation of the results.
Anatomical pathways
The anatomical pathway starts from Brodmann area 4, the frontal ascending gyrus, which, with its somatotopic organisation, is the beginning of the pyramidal tract. This is where the stimulus delivered by the electrodes acts [55]. From here, the fibres enter the centrum semiovale, then converge and descend in the internal capsule and then into the brainstem. At this level, a small portion of the fibres ends in the motor nuclei of cranial nerves. In the medulla oblongata, about 80–90% of the remaining fibres decussate and descend contralaterally in the lateral aspect of the spinal cord. This bundle diminishes gradually in size as its fibres synapse with the motoneurons of the anterior horns [50]. The remaining 10–20% of fibres that does not cross over travels in the corticospinal tract that is placed anteriorly in the spinal cord; it, too, reaches motoneurons of the anterior horns.
Physiology of MEPs in normal conditions and under anaesthesia
Under normal conditions, with no anaesthetic interference, a single electrical impulse given to the cortex or the subcortical white matter will produce a response that can be recorded with an epidural electrode placed at thoracic level. The first obtainable response is the so-called D-wave, which consists of the orthodromic nerve potential that derives from the direct stimulation of white matter and therefore of the axons. Following, several so-called I-waves are registered. These represent the response to the stimulation of cortical neurons. Peripherally, muscular registration is not optimal in response to a single stimulus: it requires a train of multiple stimuli [56].
In all functions that involve synaptic activity or neural network integration, as in the cortex or in the anterior horns, anaesthesia can modify the responses. With the use of halogenated anaesthetics, a single stimulus is not able to elicit recordable I-waves or muscular responses (MEPs). In general, during anaesthesia, the activation threshold of neurons located in the anterior horns is increased, likely due to a reduced activity of inhibitory interneurons [56]. Muscular MEPs (mMEPSs) can be nonetheless registered if the doses of halogenated anaesthetics (e.g. isoflurane, sevoflurane and desflurane) are not too high. However, the problem remains: in the occurrence of MEP modification during a surgical procedure, it can be extremely difficult to determine whether the cause is surgical injury or interference by anaesthesia. Moreover, the disturbing action of halogenated gasses depends not only on their concentration, but also on the total time of administration, making MEPs less accurate during the central most important part of surgery. Additionally, presurgical MEP alterations attributable to the underlying disease complicate the interpretation of the data. It is therefore universally recommended not to use halogenated anaesthetics [54]. Total intravenous anaesthesia (TIVA) has become indeed widely used, when intraoperative monitoring is required, because of its far inferior interferences.
Moreover, the stimulus is never delivered singly, but in trains. Not involving any synapse, the D-wave is usually not disturbed by anaesthetics and can even be used when neuromuscular blocking agents are administered. It must be noted that high doses of propofol can cause suppression of motoneurons of the anterior horns [22].
Stimulation technique
Stimulation electrodes are positioned at C3 and C4 (10–10 International System) and are potentially able to activate both upper and lower limbs. C1 and C2 are used when the focus is on lower limbs, as also with midline positioning of the electrodes. Required voltage and current largely depend on the type of electrode used: with subdermic needles, a lower voltage and current are used, than with cup electrodes. The train stimuli used during TcMEPs has an amplitude ranging from 70 to 900 V; maximum currents vary between 0.8 and 0.9 A; each pulse lasts between 50 and 500 msec [15] and their number is 4 to 13, with a frequency of 150–500 Hz. The threshold is lower with longer duration of the pulses [56].
Peripheral muscular MEPs (mMEPs)
Muscular MEPs are the most commonly used. Registered potentials are very wide and thus easily readable. Muscular MEPs allow to monitor the entire motor system, from the motor cortex to the neuromuscular junction, discriminating the separate functioning of the four limbs. Unlike SSEPs, no averaging is required, allowing for real-time updating. Moreover, mMEPs are present in a higher percentage of patients, even when SSEPs are compromised by the underlying disease.
D-wave
D-wave monitoring has been shown to be particularly reliable in spinal tumour surgery [25]. It is considered the gold standard in monitoring of the corticospinal tract and it can be continuously evoked without causing muscular movements (unlike mMEPs). It is relatively resistant to anaesthetic effects and allows the use of neuromuscular blockade [14, 48, 60]. D-wave amplitude is proportional to the number of fibres, the conduct, the signal and therefore, its reduction signals a proportional loss of function of those fibres. It must be noted that, in few cases of intramedullary spinal cord lesions or in post-actinic myelopathies, D-wave might be absent. It is infrequently used during deformity surgery because of the high number of false positives, probably due to rotation of the corticospinal tract during correction manoeuvres [60]. Moreover, D-wave monitoring cannot be used under T11–T12 for anatomical reasons, since there are not enough corticospinal fibres to evoke a potential. Lastly, unlike peripheral muscle recordings, it does not allow to investigate lateralisation of injury.
Intraoperative interpretation
Several criteria have been used and investigated to assess motor response. One of these is the ‘all-or-nothing’ criteria: a complete loss of a previously recordable signal is indicative of a clinical injury. This method is of course limited by low sensibility: modifications not as striking as a complete loss of signal can still result in clinically evident deficit [8]. Moreover, such injury is potentially recoverable if identified in real-time during the procedure.
Another criterion, well described by Langeloo et al. [27], considers the amplitude of the recordings: a reduction of at least 80% in at least 1 of 6 sites of registration on the body is deemed indicative. In their study, this method showed sensibility of 100% and specificity of 91%.
The threshold criterion, described by Calancie e Molano [8], has been applied in a study of 903 operated subjects. An increased threshold of 100 V required to evoke a motor potential, persistent for at least 1 h (excluding environmental factors), was correlated with the probability of postoperative deficits.
Lastly, the morphologic criterion considers modifications of the pattern or the duration of registered waves. Quinones-Hinojosa et al. [41] describe modifications of waves that from polyphasic become biphasic or vice versa before being completely lost, in the setting of removal of intramedullary spinal tumours. It must be noted that, besides anaesthetic agents, blood pressure, surgical positioning and body temperature might also interfere with the morphology of the registered potentials.
The loss of MEPs is always a main predictor of a clinical deficit, as well as their reappearance, a positive prognostic signal (Fig. 2). Reduction of amplitude, acute threshold rise and morphologic modifications can be considered criteria of minor, moderate or major importance, depending on the surgical procedure, on the environmental situation and especially on the experience of the neurophysiologist, who cooperates with the surgeon must interpret the recordings.

MEPs during posterior cervical surgery. Young woman with cervical myelopathy and tetraparesis. Reappearance of MEP at upper and lower limbs during surgical decompression
As for the D-wave, a reduction in amplitude of 50% or more is generally accepted as indicative of clinical loss of motor function.
To summarise, in the presence of preserved D-wave and mMEPs, no modifications of clinical status are expected. If D-wave is preserved or reduced by 30 to 50%, with uni- or bilateral loss of mMEPs, a temporary motor deficit is highly likely at awakening. A reduction of D-wave amplitude between 30 and 50%, with preserved mMEPS, is not predictive of motor deficit. A reduction of D-wave amplitude of more than 50%, combined with bilateral loss of mMEPs, is instead evidence of permanent motor deficit [35].
In intramedullary spinal surgery, the use of mMEPs and D-wave can be crucial in influencing surgical strategy. Direct stimulation of motor bundles can also be associated; it is especially helpful in high density anatomical areas as in the cervical spinal cord [17, 24].
Safety, complications and limits of motor evoked potentials
Because of its high voltage and its released currents, stimulation can potentially injure the staff, if due precautions are not taken. One of the most common complications is direct stimulation of the trigeminal nerve, with mandibular contraction and biting of the tongue. Such occurrence can be prevented by positioning gauzes between the teeth before the beginning of the procedure [55]. The electrodes, and in general, all the monitoring equipment, must be placed in such a manner as not to disturb the surgeon, who must be able to perform the procedure with no limitation (which could be source of environmental noise).
A limit of motor evoked potentials is that evoking mMEPs causes muscular jerks, and therefore, the surgeon must usually temporarily interrupt the procedure. As for D-wave monitoring, its use is mostly limited to intramedullary tumour resection surgery [55].
Surgeons and neurophysiologists must be aware of the theoretical risk of seizures, deriving from excessive cortical stimulation. Lastly, caution is strongly advised in the case of a patient with an implantable cardioverter defibrillator or a pacemaker: the possibility of injury should be discussed with a cardiologist before the procedure. Other implants that might restrict the use of motor evoked potentials include cochlear and deep brain stimulation implants [55].
Electromyography (EMG)
Spontaneous free-running EMG and its interpretations
Spontaneous EMG (sEMG) is a valid tool to monitor the condition of a root innervating a given skeletal muscle. For this purpose, individual muscles must be selected in such a way as to associate them to single nerve roots, even though a certain degree of redundancy is well known. One must obviously monitor the nerve roots potentially involved in the procedure. For example, during cervical spine surgery, a possible involvement of the C5 root is well documented and must therefore be monitored: the deltoid and brachial biceps muscles are usually selected (being generally innervated by C5 and C6) [7, 16, 21].
No electromyographic activity is normally measurable in a muscle of a sleeping subject during a surgical procedure. Traction, compression or stretch of a nerve root give rise to neurotonic discharges that produce a recordable activity in the corresponding muscle. Electromyographic activity can be represented by trains, bursts or spikes [7, 18, 38]. Trains are usually caused by a constant force applied to the nerve root. In the case of continuous and sustained manipulation, high frequency or intensity trains indicate the possibility of nerve injury. Romstock classified the patterns of trains into types A, B and C [47]; of these, type A, characterised by high frequency, is the most likely to predict a significant injury. Spikes and bursts usually signal proximity to the nerve root.
Unlike MEPs, the electromyographic feedback to the surgeon is continuous and instantaneous.
Spontaneous free-running EMG and its limitations
Correct positioning of the electrodes is essential, since the muscular activity might be incomplete or unsynchronised and thus only recordable on a portion of the muscle [5, 23]. Moreover, chronic damage of the nerve root, due to long standing degenerative pathology, can produce fasciculation or fibrillation that can lead to misinterpretation of EMG. In this case, however, such alterations are present from the beginning of the procedure. It is therefore helpful to record a base-line before the procedure has started and after neuromuscular blockade, usually necessary for intubation, is metabolised.
Spontaneous EMG is extremely sensitive to neuromuscular blockade, to anaesthesia in general, and to temperature variations [57]. False positive signs might arise in case of irrigation with cold water or of electrocautery. Lastly, acute transection of the nerve root usually does not evoke a recordable EMG activity. Gunnarson et al. [18] reported spontaneous EMG activation at least once in 77.5% of 213 consecutive lumbosacral cases, which resulted in a sensitivity of 100%, but a specificity of only 23.5%. Other studies investigating spontaneous EMG reported similar findings of high sensitivity and low specificity [7, 21, 42].
The low specificity, however, may reflect the fact that spontaneous EMG is providing constant feedback to the surgeon, leading to alterations in surgical technique that may prevent a new neurological deficit and thus deceptively elevating the rate of false positives [54].
Triggered EMG
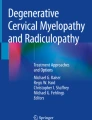
Triggered EMG (tEMG), initially described by Calancie et al. [10], is commonly used in instrumented spinal surgery to determine if an implanted screw is correctly positioned and does not breach the pedicular or somatic bone (Fig. 3) [28, 40, 43, 44]. If a screw is positioned too close to a nerve root, the latter will be stimulated by an electric impulse applied to the screw. Obviously, the interpretation of triggered EMG depends of the intensity of the stimulus. Obtaining a radicular response to stimulation with low intensity current means that the screw is positioned near the nerve root, because of disruption of the medial wall of the peduncle, or that between the screw and the nerve root, there is not enough impedance. The latter occurs, for instance, in case of severe osteoporosis.

tEMG young man, surgical procedure of spinal lumbar stabilisation with screws. tEMG during right L4 screw positioning. Direct stimulation at 1 mA shows an important nerve root response with high amplitude. This is the evidence of a very short distance from nerve roots and of the need for removing the screw and changing its trajectory
In 2002, with a study that enrolled 662, Toleikis demonstrated that a threshold inferior to 10 mA (duration of stimulus of 0.2 ms) is indicative of malpositioning of lumbar screws [58]. More specifically, with values of 5 mA or less, the screw was in most cases incorrectly positioned; with values higher than 10 mA, no malpositioning was seen. In 2007, Raynor et al., having analysed 4857 pedicular screws, assessed a 0.31% frequency of medial wall breach when intraoperative tEMG threshold was > 8 mA. The percentage rose to 17.4% for values between 4 and 8 mA, to 54.2% below 4 mA, and to 100% below 2.8 mA [44].
Direct stimulation of the screw conduit might be used before its positioning. In this case, Calancie identified in 1994 a 7 mA limit below which disruption of the medial wall of the peduncle must be suspected [9].
It is important to underline that the use of tEMG in screws positioning plays an essential role in decreasing the need for fluoroscopy and x-rays dose.
Confounding factors and tEMG for screw positioning
In degenerative spine surgery, nerve roots are frequently already damaged, mainly because of chronic compression, as is the case for radiculopathies. In such cases, the threshold for stimulation of the screw is higher [20]. A misleading high value of threshold might therefore hide screw malpositioning. Moreover, it may be necessary to stimulate a screw near a nerve root previously damaged during surgery. In this case, direct stimulation of the nerve root might be of aid. The threshold value of direct stimulation of a normal nerve root is usually about 0.2 mA. Higher values suggest that the nerve root is already damaged [1].
Threshold values vary on the anatomy of the vertebrae. For thoracic vertebrae, for example, threshold values below 6 mA are related to a high probability of medial wall disruption (Raynor et al., Spine 2003) [43].
The phenomenon of current shunting must also be taken into consideration. Current shunting may occur if a screw is stimulated after having positioned the bars, which can transmit the stimulus to the whole system. Current shunting may also depend on the presence of a solution with a high saline concentration. On the other hand, it may be difficult to stimulate galvanised screws or screws coated with non-conducting materials [1].
Pharmacologic neuromuscular blockade may also be the cause of threshold rise [33].
It must be highlighted that all of these confounding occurrences might affect the positive outcome of the surgery. Besides an extensive technical knowledge, close interaction between the surgeon and the neurophysiologist is therefore necessary.
Minimally invasive spinal surgery applications
Transpsoas lateral access
Lumbar plexus and the need for neuromonitoring
The lateral transpsoas access was described in the late 1990s. Early attempts reported significant complication rates [4, 31]. In 2004, Bergey et al. reported a 30% incidence of neurological complications [4]. Such high rate depends on the complex woven anatomy of the lumbar plexus that the surgeon must face, before carrying out the microdiscectomy and the lumbar fusion, typically from L1–L2 to L4–L5 as the technique allows.
The need for an intraoperative neurophysiological support became therefore immediately clear, to benefit from a truly minimally invasive approach, without disabling complications for the patient.
In the early 2000s, anatomical studies intensified, clarifying the disposition of the nerves of the lumbar plexus on a lateral view [2, 3, 13, 34, 39, 45, 46, 61]. In normal anatomy, cranially to L3–L4, the components of the lumbar plexus are sited in the posterior quarter of the vertebral body, while they are in the posterior half at L3–L4 and L4–L5. The genitofemoral nerve descends obliquely through the psoas muscle, becoming superficial at L3 or L4. The ileoinguinal and ileohypogastric nerves descend obliquely crossing the muscle wall latero-medially. The lateral femoral cutaneous nerve has a similar course in the retroperitoneal space.
In 2010, Uribe et al. described the safe entry zones at each disc level, based on cadaveric studies [61].
Type of neuromonitoring
As in all spinal surgery, neuromonitoring includes the use of SSEPs, transcranial MEPs and spontaneous or tEMG. SSEPs and TcMEPs are not very suitable to study single nerve roots and are therefore less used. In SSEP monitoring, the peripheral nerves that are stimulated usually derive from multiple nerve roots. Similarly, in TcMEP monitoring, the single nerve root is hard to study because of the overlapping of adjacent nerve roots in muscular innervation. Therefore, the technique has gradually developed around EMG monitoring, embedding its use in the construction of dedicated instrumentation.
Neural mapping during surgical access
Generally, the electrodes are placed in the vastus medialis, tibialis anterior, biceps femoris and medial gastrocnemius. After blunt dissection of the muscular planes and access to the retroperitoneal space, the surgical technique requires the simultaneous use of progressive dilators and nerve stimulators, to reach the intersomatic plane through the psoas muscle. The surgeon works his way, gradually widening the approach by splitting the muscular fibres, while constantly monitoring the proximity to the components of the lumbar plexus with a pluridirectional stimulator that probes the area at 360°. The stimulation threshold correlates with the distance of the nerve, although, as discussed, thresholds might be higher for chronically injured roots. It must be noted that damage to the nervous structures can either be acute, therefore caused by surgical manipulation during the approach, or chronic, due to the prolonged use of the final dilator. Therefore, sEMG is usually associated to tEMG monitoring.
The use of EMG radically modified the outcome of patients operated with this approach, making neurological deficits a much rarer complication, according to the latest reviews [46]. EMG neuromonitoring has therefore made this technique a valid treatment option.
In recent years, changes to the established use of EMG have been proposed. Block et al. [6] proposed the use of MEPs to detect potential damage to the femoral nerve, a major risk in this type of approach, given the anatomy and the functional importance of the nerve itself, particularly at L3–L4 and L4–L5 levels. The L2, L3 and L4 roots join in the psoas muscle to form the femoral nerve trunk; subsequently, no other anatomical nervous contribution reaches the femoral nerve. Therefore, the lack of quadriceps muscle responses can be considered a reliable index of damage to the femoral nerve.
For the same principle, Silverstein et al. [51] used SSEPs monitoring of the saphenous nerve (sensitive branch of the femoral nerve) and demonstrated that also such technique can be a reliable tool to predict postoperative deficits and aid the surgeon during the procedure.
Posterior approach for divergent cortico-peduncolar screw placement
In 2009, Santoni et al. [49] described a novel way of positioning pedicular screws, with a mediolateral divergent trajectory that intercepts a greater quantity of cortical bone (Fig. 4).

Cortical bone trajectory screws
The entry point of such screws is located at the junction of two lines: the first one, passing from the centre of the inferior articular process of the superior vertebra and the second one, passing horizontally 1 mm below the inferior border of the transverse process. From this point, the trajectory follows a cranial-to-caudal and medial-to-lateral course, intercepting the cortical bone first of the medial wall of the peduncle, then of the vertebral body. Even with the use of shorter screws, compared to traditional convergent pedicular screws, the described trajectory allows for an effective grip, and thus for a potentially more stable construct, as it involves three different cortical bone regions [30].
Moreover, as the entry point is more medial compared to that used for classic pedicular screws, the need for muscle skeletonisation is notably reduced, which implies less muscular atrophy and denervation injury.
The use of a divergent trajectory therefore allows for an efficient circumferential arthrodesis, with a smaller access than the common approach for pedicle screws. Being less invasive, the technique benefits from the important use of intraoperative neuromonitoring, since it allows to evaluate positioning error or root damage in real time, despite a reduced visual exposure (Fig. 5). In this case, triggered EMG is essential to exploit the potential of this trajectory and to diminish the need for fluoroscopy.

Incorrect trajectory for divergent cortico-pedicular screws, breach of cortical bone. The surgeon inserts a probe (black arrow) for direct stimulation of the trajectory (black asterisk) with an isthmic entry point (red arrow). If the neurophysiologist obtains a radicular response with a low stimulus, a breach in the pedicle or in the somatic cortical bone (red asterisk) is suspected. Surgeons usually also use direct stimulation of the screws to confirm trajectories. These methods help the surgeon to identify a potential misplacement, thus suggesting to change trajectory, and are especially useful in minimally invasive procedures with reduced visual access
References
Anderson DG, Wierzbowski LR, Schwartz DM, Hilibrand AS, Vaccaro AR, Albert TJ (2002) Pedicle screws with high electrical resistance: a potential source of error with stimulus-evoked EMG. Spine (Phila Pa 1976) 27(14):1577–1581. https://doi.org/10.1097/00007632-200207150-00018
Banagan K, Gelb D, Poelstra K, Ludwig S (2011) Anatomic mapping of lumbar nerve roots during a direct lateral transpsoas approach to the spine: a cadaveric study. Spine 36(11):E687–E691
Benglis DM, Vanni S, Levi AD (2009) An anatomical study of the lumbosacral plexus as related to the minimally invasive transpsoas approach to the lumbar spine. J Neurosurg Spine 10:139–144
Bergey DL, Villavicencio AT, Goldstein T, Regan JJ (2004) Endoscopic lateral transpsoas approach to the lumbar spine. Spine 29(15):1681–1688. https://doi.org/10.1097/01.BRS.0000133643.75795.EF
Bigelow DC, Patterson T, Weber R, Stecker MM, Judy K (2002) Comparison of endotracheal tube and hookwire electrodes for monitoring the vagus nerve. J Clin Monit Comput 17(3/4):217–220. https://doi.org/10.1023/A:1020729832385
Block J, Silverstein JW, Ball HT, Mermelstein LE, DeWal HS, Madhok R, Basra SK, Goldstein MJ (2015) Motor evoked potentials for femoral nerve protection in transpsoas lateral access surgery of the spine. Neurodiagn J 55(1):36–45. https://doi.org/10.1080/21646821.2015.1012456
Bose B, Sestokas AK, Schwartz DM (2007) Neurophysiological detection of iatrogenic C-5 nerve deficit during anterior cervical spinal surgery. J Neurosurg Spine 6(5):381–385. https://doi.org/10.3171/spi.2007.6.5.381
Calancie B, Molano MR (2008) Alarm criteria for motor-evoked potentials: what’s wrong with the “presence-or-absence” approach? Spine 33(4):406–414. https://doi.org/10.1097/BRS.0b013e3181642a2f
Calancie B, Madsen P, Lebwohl N (1994) Stimulus-evoked EMG monitoring during transpedicular lumbosacral spine instrumentation. Initial clinical results. Spine 19(24):2780–2786
Calancie B, Harris W, Broton JG, Alexeeva N, Green BA (1998) “Threshold-level” multipulse transcranial electrical stimulation of motor cortex for intraoperative monitoring of spinal motor tracts: description of method and comparison to somatosensory evoked potential monitoring. J Neurosurg 88(3):457–470. https://doi.org/10.3171/jns.1998.88.3.0457
Chiappa K, Hill R (1997) Short latency somatosensory evoked potentials: methodology. In: Chiappa K (ed) Evoked potentials in clinical medicine. Lippincott-Raven, Philadelphia
Costa P, Bruno A, Bonzanino M, Massaro F, Caruso L, Vincenzo I, Ciaramitaro P, Montalenti E (2007) Somatosensory- and motor-evoked potential monitoring during spine and spinal cord surgery. Spinal Cord 45(1):86–91. https://doi.org/10.1038/sj.sc.3101934
Dakwar E, Vale FL, Uribe JS (2011) Trajectory of the main sensory and motor branches of the lumbar plexus outside the psoas muscle related to the lateral retroperitoneal transpsoas approach. J Neurosurg Spine 14(2):290–295. https://doi.org/10.3171/2010.10.SPINE10395
Deletis V, Sala F (2008) Intraoperative neurophysiological monitoring of the spinal cord during spinal cord and spine surgery: a review focus on the corticospinal tracts. Clin Neurophysiol 119(2):248–264. https://doi.org/10.1016/j.clinph.2007.09.135
Deletis V, Isgum V, Amassian VE (2001) Neurophysiological mechanisms underlying motor evoked potentials in anesthetized humans. Part 1. Recovery time of corticospinal tract direct waves elicited by pairs of transcranial electrical stimuli. Clin Neurophysiol 112(3):438–444. https://doi.org/10.1016/S1388-2457(01)00461-8
Fan D, Schwartz DM, Vaccaro AR, Hilibrand AS, Albert TJ (2002) Intraoperative neurophysiologic detection of iatrogenic C5 nerve root injury during laminectomy for cervical compression myelopathy. Spine (Phila Pa 1976) 27(22):2499–2502. https://doi.org/10.1097/01.BRS.0000031313.90883.29
Gandhi R, Curtis CM, Cohen-Gadol AA (2015) High-resolution direct microstimulation mapping of spinal cord motor pathways during resection of an intramedullary tumor. J Neurosurg Spine 22(2):205–210. https://doi.org/10.3171/2014.10.SPINE1474
Gunnarsson T, Krassioukov AV, Sarjeant R, Fehlings MG (2004) Real-time continuous intraoperative electromyographic and somatosensory evoked potential recordings in spinal surgery: correlation of clinical and electrophysiologic findings in a prospective, consecutive series of 213 cases. Spine (Phila Pa 1976) 29(6):677–684. https://doi.org/10.1097/01.BRS.0000115144.30607.E9
Hadley MN, Shank CD, Rozzelle CJ, Walters BC (2017) Guidelines for the use of electrophysiological monitoring for surgery of the human spinal column and spinal cord. Neurosurgery 81(5):713–732. https://doi.org/10.1093/neuros/nyx466
Holland NR, Lukaczyk TA, Riley LH 3rd, Kostuik JP (1998) Higher electrical stimulus intensities are required to activate chronically compressed nerve roots. Implications for intraoperative electromyographic pedicle screw testing. Spine (Phila Pa 1976) 23(2):224–227. https://doi.org/10.1097/00007632-199801150-00014
Jimenez JC, Sani S, Braverman B, Deutsch H, Ratliff JK (2005) Palsies of the fifth cervical nerve root after cervical decompression: prevention using continuous intraoperative electromyography monitoring. J Neurosurg Spine 3(2):92–97. https://doi.org/10.3171/spi.2005.3.2.0092
Kalkman CJ, Drummond JC, Kennelly NA, Patel PM, Partridge BL Intraoperative monitoring of tibialis anterior muscle motor evoked responses to transcranial electrical stimulation during partial neuromuscular blockade. Anesth Analg 75:584–589
Khan A, Pearlman RC, Bianchi DA, Hauck KW (1997) Experience with two types of electromyography monitoring electrodes during thyroid surgery. Am J Otolaryngol 18(2):99–102. https://doi.org/10.1016/S0196-0709(97)90095-8
Kothbauer KF (2007) Intraoperative neurophysiologic monitoring for intramedullary spinal-cord tumor surgery. Neurophysiol Clin 37(6):407–414. https://doi.org/10.1016/j.neucli.2007.10.003
Kothbaurer K (2002) Motor evoked potential monitoring for intramedullary spinal cord surgery. In: Deletis V, Shils J (eds) Neurophysiology in neurosurgery. Academic Press, San Diego, pp 73–92. https://doi.org/10.1016/B978-012209036-3/50006-8
Lall RR, Lall RR, Hauptman JS, Munoz C, Cybulski GR, Koski T, Ganju A, Fessler RG, Smith ZA (2012) Intraoperative neurophysiological monitoring in spine surgery: indications, efficacy, and role of the preoperative checklist. Neurosurg Focus 33(5):E10. https://doi.org/10.3171/2012.9.FOCUS12235
Langeloo DD, Lelivelt A, Louis Journee H, Slappendel R, de Kleuver M (2003) Transcranial electrical motor-evoked potential monitoring during surgery for spinal deformity: a study of 145 patients. Spine 28(10):1043–1050. https://doi.org/10.1097/01.BRS.0000061995.75709.78
Lenke LG, Padberg AM, Russo MH, Bridwell KH, Gelb DE (1995) Triggered electromyographic threshold for accuracy of pedicle screw placement. An animal model and clinical correlation. Spine (Phila Pa 1976) 20(14):1585–1591
Loder RT, Thomson GJ, LaMont RL (1991) Spinal cord monitoring in patients with nonidiopathic spinal deformities using somatosensory evoked potentials. Spine (Phila Pa 1976) 16(12):1359–1364. https://doi.org/10.1097/00007632-199112000-00003
Matsukawa K, Yato Y, Imabayashi H, Hosogane N, Asazuma T, Chiba K (2015) Biomechanical evaluation of the fixation strength of lumbar pedicle screws using cortical bone trajectory: a finite element study. J Neurosurg Spine 23(4):471–478. https://doi.org/10.3171/2015.1.SPINE141103
McAfee PC, Regan JJ, Geis WP, Fedder IL (1998) Minimally invasive anterior retroperitoneal approach to the lumbar spine. Emphasis on the lateral BAK. Spine 23(13):1476–1484. https://doi.org/10.1097/00007632-199807010-00009
Merton PA, Morton HB (1980) Stimulation of the cerebral cortex in the intact human subject. Nature 285(5762):227. https://doi.org/10.1038/285227a0
Minahan RE, Riley LH 3rd, Lukaczyk T, Cohen DB, Kostuik JP (2000) The effect of neuromuscular blockade on pedicle screw stimulation thresholds. Spine (Phila Pa 1976) 25(19):2526–2530. https://doi.org/10.1097/00007632-200010010-00016
Moro T, Kikuchi S, Konno S, Yaginuma H (2003) An anatomic study of the lumbar plexus with respect to retroperitoneal endoscopic surgery. Spine 28:423–428
Morota N, Deletis V, Constatini S, Kofler M, Cohen H, Epstein FJ (1997) The role of motor evoked potentials during surgery for intramedullary spinal cord tumors. Neurosurgery 41(6):1327–1336. https://doi.org/10.1097/00006123-199712000-00017
Nash CL Jr, Lorig RA, Schatzinger LA, Brown RH (1977) Spinal cord monitoring during operative treatment of the spine. Clin Orthop Relat Res 100–105
Nuwer MR, Dawson EG, Carlson LG, Kanim LE, Sherman JE (1995) Somatosensory evoked potential spinal cord monitoring reduces neurologic deficits after scoliosis surgery: results of a large multicenter survey. Electroencephalogr Clin Neurophysiol 96(1):6–11. https://doi.org/10.1016/0013-4694(94)00235-D
Obi T, Mochizuki M, Isobe K, Mizoguchi K, Takatsu M, Nishimura Y (1999) Mechanically elicited nerve root discharge: mechanical irritation and waveform. Acta Neurol Scand 100(3):185–188
Park DK, Lee MJ, Lin EL, Singh K, An HS, Phillips FM (2010) The relationship of intrapsoas nerves during a transpsoas approach to the lumbar spine: anatomic study. J Spinal Disord Tech 23:223–228
Parker SL, Amin AG, Farber SH, McGirt MJ, Sciubba DM, Wolinsky JP, Bydon A, Gokaslan ZL, Witham TF (2011) Ability of electromyographic monitoring to determine the presence of malpositioned pedicle screws in the lumbosacral spine: analysis of 2450 consecutively placed screws. Clinical article. J Neurosurg Spine 15(2):130–135. https://doi.org/10.3171/2011.3.SPINE101
Quinones-Hinojosa A, Lyon R, Zada G, Lamborn KR, Gupta N, Parsa AT et al (2005) Changes in transcranial motor evoked potentials during intramedullary spinal cord tumor resection correlate with postoperative motor function. Neurosurgery 56:982–993
Quraishi NA, Lewis SJ, Kelleher MO, Sarjeant R, Rampersaud YR, Fehlings MG (2009) Intraoperative multimodality monitoring in adult spinal deformity: analysis of a prospective series of one hundred two cases with independent evaluation. Spine (Phila Pa 1976) 34(14):1504–1512. https://doi.org/10.1097/BRS.0b013e3181a87b66
Raynor BL, Lenke LG, Kim Y, Hanson DS, Wilson-Holden TJ, Bridwell KH, Padberg AM (2002) Can triggered electromyograph thresholds predict safe thoracic pedicle screw placement? Spine (Phila Pa 1976) 27(18):2030–2035. https://doi.org/10.1097/00007632-200209150-00012
Raynor BL, Lenke LG, Bridwell KH, Taylor BA, Padberg AM (2007) Correlation between low triggered electromyographic thresholds and lumbar pedicle screw malposition: analysis of 4857 screws. Spine (Phila Pa 1976) 32(24):2673–2678. https://doi.org/10.1097/BRS.0b013e31815a524f
Regev GJ, Chen L, Dhawan M, Lee YP, Garfin SR, Kim CW (2009) Morphometric analysis of the ventral nerve roots and retroperitoneal vessels with respect to the minimally invasive lateral approach in normal and deformed spines. Spine 34:1330–1335
Rodgers WB, Gerber EJ, Patterson J (2011) Intraoperative and early postoperative complications in extreme lateral interbody fusion: an analysis of 600 cases. Spine 36(1):26–32. https://doi.org/10.1097/BRS.0b013e3181e1040a
Romstock J, Strauss C, Fahlbusch R (2000) Continuous electromyography monitoring of motor cranial nerves during cerebellopontine angle surgery. J Neurosurg 93(4):586–593. https://doi.org/10.3171/jns.2000.93.4.0586
Sala F, Palandri G, Basso E, Lanteri P, Deletis V, Faccioli F, Bricolo A (2006) Motor evoked potential monitoring improves outcome after surgery for intramedullary spinal cord tumors: a historical control study. Neurosurgery 58(6):1129–1143. https://doi.org/10.1227/01.NEU.0000215948.97195.58
Santoni BG, Hynes RA, McGilvray KC, Rodriguez-Canessa G, Lyons AS, Henson MA et al (2009) Cortical bone trajectory for lumbar pedicle screws. Spine J 9(5):366–373. https://doi.org/10.1016/j.spinee.2008.07.008
Sherrington C (1906) The integrative action of the nervous system. Yale University Press, New Haven
Silverstein J, Mermelstein L, DeWal H, Basra S (2014) Saphenous nerve somatosensory evoked potentials: a novel technique to monitor the femoral nerve during transpsoas lumbar laterale interbody fusion. Spine (Phila Pa 1976) 39(15):1254–1260. https://doi.org/10.1097/BRS.0000000000000357
Skinner S, Sala F (2017) Communication and collaboration in spine neuromonitoring: time to expect more, a lot more, from the neurophysiologists. J Neurosurg Spine 27(1):1–6. https://doi.org/10.3171/2016.12.SPINE161212
Skinner S, Holdefer R, McAuliffe JJ, Sala F (2017) Medical error avoidance in intraoperative neurophysiological monitoring: the communication imperative. J Clin Neurophysiol 34(6):477–483. https://doi.org/10.1097/WNP.0000000000000419
Sloan T (2002) Anesthesia and motor evoked potential monitoring. In: Deletis V, Shils J (eds) Neurophysiology in neurosurgery, San Diego, Academic Press, pp 452–474. https://doi.org/10.1016/B978-012209036-3/50019-6
Stecker MM A review of intraoperative monitoring for spinal surgery. Surg. Neurol Int 2012; 3(Suppl 3): S174–S187
Stecker MM, Robertshaw J (2006) Factors affecting reliability of interpretations of intra-operative evoked potentials. J Clin Monit Comput 20(1):47–55. https://doi.org/10.1007/s10877-005-9006-8
Stecker MM, Baylor K, Wolfe J, Stevenson M (2011) Acute nerve stretch and the compound motor action potential. J Brachial Plex Peripher Nerve Inj 6:4
Toleikis RJ (2002) Neurophysiological monitoring during pedicle screw placement. In: Deletis V, Shils J (eds) Neurophysiology in neurosurgery. Academic Press, San Diego, pp 231–264. https://doi.org/10.1016/B978-012209036-3/50013-5
Toleikis JR (2005) American Society of Neurophysiological Monitoring. Intraoperative monitoring using somatosensory evoked potentials. A position statement by the American Society of Neurophysiological Monitoring. J Clin Monit Comput 19(3):241–258. https://doi.org/10.1007/s10877-005-4397-0
Ulkatan S, Neuwirth M, Bitan F, Minardi C, Kokoszka A, Deletis V (2006) Monitoring of scoliosis surgery with epidurally recorded motor evoked potentials (D wave) revealed false results. Clin Neurophysiol 117(9):2093–2101. https://doi.org/10.1016/j.clinph.2006.05.021
Uribe JS, Arredondo N, Dakwar E, Vale FL (2010) Defining the safe working zones using the minimally invasive lateral retroperitoneal transpsoas approach: an anatomical study. J Neurosurg Spine 13:260–266
Yen CP, Mosley YI, Uribe JS (2016) Role of minimally-invasive surgery for adult spinal deformity in preventing complications. Curr Rev Musculoskelet Med 9(3):309–315. https://doi.org/10.1007/s12178-016-9355-6
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
This article does not contain any studies with human participants or animals performed by any of the authors. Informed consent was obtained from all individual participants included in this study.
Conflict of interest
The authors declare that there is no conflict of interest.
Rights and permissions
About this article

Cite this article
Cofano, F., Zenga, F., Mammi, M. et al. Intraoperative neurophysiological monitoring during spinal surgery: technical review in open and minimally invasive approaches. Neurosurg Rev 42, 297–307 (2019). https://doi.org/10.1007/s10143-017-0939-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10143-017-0939-4