
Abstract
We study the generalised alternating local discontinuous Galerkin (GA-LDG) method for one- and two-dimensional singularly perturbed convection–diffusion problems. The method is equipped with an upwind-biased numerical flux for the convection term and a generalised alternating numerical flux for the diffusion term in the interior of the domain. For the one-dimensional case, we demonstrate an optimal uniform error estimate for the LDG method under the energy norm and an \(\varepsilon \)-weighted \(L^2\)-norm. For the two-dimensional case, we establish an optimal or a quasi-optimal error estimate for the LDG method under the energy norm. Our results are valid for three typical layer-adapted meshes, namely the Shishkin mesh, the Bakhvalov–Shishkin mesh, and a Bakhvalov-type mesh. The findings of numerical experiments are presented to verify the theoretical results.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In this study, we analyse the so-called generalised alternating local discontinuous Galerkin (GA-LDG) method for one- and two-dimensional singularly perturbed problems. The solution to such a problem exhibits rapid change in a narrow region and forms the boundary layer or interior layer. We consider only the solution with a boundary layer.
It is well known that the standard finite element method (FEM) or finite difference method on quasi-uniform meshes yields an oscillating numerical solution. A common approach to overcome this difficulty is to employ a layer-adapted mesh based on the a priori property of the solution. Such grids are fine in the layer region and standard outside. Representative examples are the Shishkin mesh [26], Bakhvalov mesh [2], and their generalisations; see [21]. The layer-adapted mesh induces numerical stability and uniform convergence of the numerical method. However, owing to a lack of stability, small oscillations occur and it can be difficult to solve the associated discrete algebraic system efficiently. Therefore, higher-order stabilisation methods on layer-adapted meshes are preferred in applications, such as the streamline diffusion FEM [20, 27], local projection stabilisation [17], continuous interior penalty [4], and various discontinuous Galerkin (DG) (e.g. interior penalty DG [31], direct DG [22], and local DG [34]) methods. For further details, see [25].
The LDG method is an extension of the Runge–Kutta DG (RKDG) method for purely convective problems [14] and the compressible Navier–Stokes equations [3]. It was first introduced in [13] for general convection–diffusion systems. The basic idea is to write the system into a larger, degenerate, first-order system and subsequently to discretise it using the RKDG method. The LDG method possesses several properties, such as local conservativity, a high degree of locality, and adaptive hp-refinement. These properties render the LDG method suitable for a wide range of problems; see [30].
As an important factor in designing the LDG method, the numerical flux should be suitably selected to ensure stability of the method [13]. There has been considerable interest in the numerical flux regarding the accuracy of the method. In [13], Cockburn and Shu established a suboptimal error estimate for a general form of the numerical flux. In [7], Castillo established a unified error analysis for the LDG method with different numerical fluxes for elliptic problems. In terms of purely alternating flux, Castillo and Cockburn demonstrated the optimal error estimate for the one-dimensional convection–diffusion problem [6], two-dimensional elliptic problem [12], and two-dimensional convection–diffusion problem [11]. Thus far, the optimal error estimate has been studied extensively for the LDG method with purely alternating flux. However, the GA-LDG method is not only flexible in its application to solving linear equations with varying coefficients or even nonlinear equations, but also frequently displays an optimal convergence rate [9]. To verify this optimality in theory, generalised Gauss–Radau (GGR) projections have recently been developed and studied [9, 10, 18, 23, 24].
The LDG method exhibits effective behaviour for the singularly perturbed problem. In [29], Xie et al. carried out several numerical experiments indicating that the LDG method does not produce any oscillation outside the boundary layer region under a uniform mesh. The local optimal error estimate was later verified in [32]. To obtain global uniform convergence, Zhu et al. studied the LDG method on the standard Shishkin mesh [33, 34]. Their numerical fluxes were purely upwinding for the convection and penalised or alternating for the diffusion.
However, at present, no uniform convergence analysis is available for the GA-LDG method. In this paper, we present the first error analysis for the GA-LDG method on layer-adapted meshes for singularly perturbed problems. The meshes include the Shishkin mesh, the Bakhvalov–Shishkin mesh, and a Bakhvalov-type mesh. Our main contribution is the establishment of the GGR projection error on the used mesh. We prove that the GA-LDG method exhibits the same convergence properties as the well-known purely alternating LDG method [8, 34]. This provides insight into the GA-LDG method for more general singular problems or problems with highly oscillatory solutions.
The remainder of this paper is organised as follows: In Sect. 2, we present the GA-LDG method for one-dimensional singularly perturbed convection–diffusion problems. For this simple problem, we display the main concept for performing optimal and uniform error estimates. A discussion of two-dimensional singularly perturbed convection–diffusion problems is provided in Sect. 3, in which optimal or quasi-optimal error estimates are proven. In Sect. 4, numerical results are presented to confirm the theoretical results. Finally, the Appendix contains several technical proofs.
Throughout this paper, we use C to denote a generic positive constant that is independent of the singularly perturbed parameter \(\varepsilon \), mesh size, and mesh number N. This may differ in each occurrence.
2 GA-LDG method for one-dimensional case
We consider a simple one-dimensional model problem
where \(0<\varepsilon \ll 1\) is a small constant, and \(a=a(x), b=b(x)\), and \( f=f(x)\) are smooth functions that satisfy
for some positive constants \(\alpha \) and \(b_0\). Note that (2) guarantees that (1) has a unique solution in \(H_0^1(\Omega )\cap H^2(\Omega )\) for all \(f\in L^2(\Omega )\).
2.1 Discontinuous finite element space
Let \(\Omega _N= \{I_j\}_{j=1}^N\) be a general partition of \(\Omega \), where \(I_j=(x_{j-1},x_j)\), \(j=1,2,\dots ,N\), with a mesh size of \(h_j=x_j-x_{j-1}\). In this case, \(x_0=0\) and \(x_N=1\). The discontinuous finite element space is defined as
where \({\mathscr {P}}^{k} (I_{j})\) denotes the space of polynomials in \(I_{j}\) of degree \(k\ge 0\). The function in \({\mathscr {V}}_N\) enables discontinuity across the element interfaces. Two traces are denoted by \(v_j^{\pm } = \lim _{x\rightarrow x_j^{\pm }}v(x)\). If v is continuous, \(v_j=v(x_j)\). The jump and weighted average in the interior of the domain are respectively denoted by
Here, \(\mu \) is a given constant and \({\tilde{\mu }}=1-\mu \). As usual, we define \([\![{v}]\!]_0=v_0^+\) and \([\![{v}]\!]_N=-v_N^-\). If \(\mu <1/2\), we define \(v^{(\mu )}_{0}=v_0^+\). If \(\mu >1/2\), we define \(v^{(\mu )}_{N}=v_N^-\).
For \(\ell \ge 0\), let \(\Vert {\cdot }\Vert _{W^{\ell ,p}(D)}\) be the usual norm in the Sobolev space \(W^{\ell ,p}(D)\). For simplicity, we denote \(\Vert {v}\Vert _{I_j}=\Vert {v}\Vert _{L^2(I_j)}\) and \(\Vert {v}\Vert =(\sum _{j=1}^N \Vert {v}\Vert ^2_{I_j})^{1/2}\).
Several inverse inequalities are used. For any \(v\in {\mathscr {V}}_N\) and \(I_j\in \Omega _{N}\), the following hold:
where \(C>0\) is independent of \(h_j\) and v.
We use the one-dimensional local \(L^2\)-projection \(\pi \), which is defined as follows: For any \(z\in L^2(\Omega )\), \(\pi z\in {\mathscr {V}}_N\) such that in each element \(I_j\in \Omega _{N}\),
where \(\langle {\cdot },{\cdot }\rangle _{I_j}\) is the inner product in \(L^2(I_j)\). The following hold [5]:
Moreover, according to the second inverse inequality in (4) and (6a) with \(p=2\), we obtain
In this case, \(C>0\) is independent of \(h_j\) and z.
2.2 GA-LDG method
We rewrite (1) into an equivalent first-order system
Then, the GA-LDG method reads: Determine the numerical solution \(\varvec{W}=(Q,U)\in {\mathscr {V}}_N^2\equiv {\mathscr {V}}_N\times {\mathscr {V}}_N\) such that in each element \(I_j\) the following variational forms
hold for any test function \(\varvec{\chi }=(r,v)\in {\mathscr {V}}_N^2\), where the “hat” terms are the numerical fluxes to be defined. For the convective direction, we use an upwind-biased flux:
where \(\theta > 1/2\) owing to \(a(x)>0\). For the diffusive direction, we employ a generalised alternating flux:
where \(\lambda \ge 0\). Note that for \(\theta =1\), the flux at the interior element boundary point is purely upwind for convection and purely alternating for diffusion [6]. This completes the definition of the GA-LDG method for problem (1).
To simplify the analysis, we present a compact form for the above LDG scheme. Denote \(\langle {w},{v}\rangle =\sum _{I_j\in \Omega _{N}} \langle {w},{v}\rangle _{I_j}\). Summing the two equations in (8) over all elements, we obtain a compact form: Determine \(\varvec{W}=(Q,U)\in {\mathscr {V}}_N^2\), such that
where
Letting \(\varvec{\chi }=\varvec{W}\), we attain the energy norm
2.3 Layer-adapted mesh
To obtain the robust error estimate, we consider the above LDG method on a layer-adapted mesh. This requires us to know precise information regarding the exact solution of (1) and its derivatives.
Proposition 1
(Lemma 1.9, [25])) Consider (1) with sufficiently smooth data. Its solution u can be decomposed as a smooth part \({\overline{u}}\) and a layer part \(u_{\varepsilon }\):
where \({\overline{u}}\) and \(u_{\varepsilon }\) satisfy
for a positive integer j and \(0\le j \le k+2\).
We construct the layer-adapted mesh according to a mesh-generating function \(\varphi \), which is continuous, piecewise continuously differentiable, monotonically increasing, and satisfies \(\varphi (0)=0\). Let \(\tau =\sigma \varepsilon \varphi (1/2)/\alpha \), where \(\sigma >0\) is a constant to be determined. Let \(N\ge 2\) be an even integer and \(x_{N/2}=1-\tau \) be a transition point. We divide the interval \([0,1-\tau ]\) with N/2 equidistant elements and the interval \([1-\tau ,1]\) with N/2 fine elements that depend on the function \(\varphi \). Thus, the mesh points are given by
For varying \(\varphi \), we obtain different layer-adapted meshes. In Table 1, we list three popular layer-adapted meshes, namely the Shishkin mesh (S-mesh), the Bakhvalov–Shishkin mesh (BS-mesh), and a Bakhvalov-type mesh (B-mesh). Refer to [21] for a survey.
We frequently use the following properties. Their proofs are straightforward, and hence, are omitted. Refer to [8] for details.
-
Denote \({\mathscr {G}}_i =\min \{h_i/\varepsilon ,1\} e^{-\alpha (1-x_i)/(\sigma \varepsilon )} \) for \(i=N/2+1,\dots ,N\). Then,
$$\begin{aligned}&\max _{N/2+1\le i\le N}{\mathscr {G}}_i \le C N^{-1}\max |\psi ^{\prime }|, \quad \sum _{i=N/2+1}^N{\mathscr {G}}_i \le C. \end{aligned}$$(16) -
For the three types of layer-adapted meshes, \(h_i=h_{i+1}\) for \(i=1,2,\dots ,N/2-1\). Let \(\hbar = \min _i h_i\); then, \(\hbar \ge C\varepsilon N^{-1}\max |\psi ^{\prime }|\). Moreover,
$$\begin{aligned} i= N/2+1,\cdots ,N-1,\qquad&h_{i}=h_{i+1}&\quad&\text {for \, the S-mesh}, \end{aligned}$$(17a)$$\begin{aligned} i= N/2+1,\cdots ,N,\qquad&1\ge \frac{h_{i+1}}{h_{i}}\ge C&\quad&\text {for \, the BS-mesh}, \end{aligned}$$(17b)$$\begin{aligned} i= N/2+2,\cdots ,N,\qquad&1\ge \frac{h_{i+1}}{h_{i}}\ge C&\quad&\text {for \, the B-mesh}, \end{aligned}$$(17c)$$\begin{aligned} i= 1,2,\cdots ,N/2,\qquad&h_{N/2+i}\ge \frac{\sigma \varepsilon }{\alpha }\frac{1}{i+1}&\quad&\text {for \, the B-mesh}, \end{aligned}$$(17d)where \(C>0\) is a constant that is independent of \(\varepsilon \) and N.
2.4 Error estimate
Assume that \(\varepsilon \le N^{-1}\), as is generally the case in practice. We obtain the following error estimate:
Theorem 1
Let u be the solution to problem (1) satisfying Proposition 1, and \(U\in {\mathscr {V}}_N\) be the numerical solution to the LDG scheme (10) on the layer-adapted mesh (15) with \(\sigma \ge k+1.5\). Then,
where \(C>0\) is a constant that is independent of \(\varepsilon \) and N.
Remark 1
As a by-product, we derive a superconvergent in the energy norm for the difference between the LDG solution and a projection \(\varvec{\Pi }\) of the exact solution \(\varvec{w}\); that is,
See the detailed analysis in Subsect. 2.5.2.
Remark 2
The error analysis is directly extended to the variable weight \(\theta _j>1/2\), \(j=1,2,\dots ,N-1\). For the special case \(\theta =1/2\), we obtain the suboptimal error estimate in general; see Sect. 3.4 of [9] and Sect. 2.2 of [13]. Furthermore, if we employ a general form of the flux for the diffusive direction, as in [13], the optimal error estimate (18) can be established under a certain restriction condition, as in [9].
2.5 Proof of error estimate
This subsection is devoted to the proof of Theorem 1. The main technique is to use the GGR projection and to establish the approximation properties on the considered layer-adapted meshes.
2.5.1 GGR projection in one dimension
Let \({\mathscr {C}}({\overline{\Omega }}_{N})\) be the space made up of all piecewise continuous functions. For \(z\in {\mathscr {C}}({\overline{\Omega }}_{N})\), we define \({\mathbb {P}}_{\theta } z\) and \({\mathbb {Q}}_{\widetilde{\theta }} z\) as the unique elements in \({\mathscr {V}}_N\) such that
and
The boundary conditions of (19) and (20) are assumed to be vacuous when \(k=0\). These projections are referred to as GGR projections because they are reduced to the local Gauss–Radau projections in the special case of \(\theta =1\).
Their unique existence and approximation properties on the quasi-uniform mesh were established in [9]. Also see the proof in Lemma 1. However, the existing result does not apply for the highly nonuniform mesh. The following lemma provides a general estimate for the GGR projection errors in terms of the local \(L^2\)-projection error. The proof is deferred to the Appendix.
Lemma 1
For any \(z\in {\mathscr {C}}({\overline{\Omega }}_{N})\), let \(g(z)=z-\pi z\) be the local \(L^2\)-projection error. Then,
where the ratio \(\zeta =|{\widetilde{\theta }}/\theta |<1\) and the bounding constant \(C>0\) is independent of the mesh size.
Remark 3
Lemma 1 can be viewed as an extension of the local stability of the local Gauss–Radau projections \(\pi ^{\pm }\) [6].
If the mesh is quasi-uniform, Lemma 1 yields optimal approximation properties of the GGR projections [9], as an application of (6b).
As an application of Lemma 1 for the solution satisfying Proposition 1, and the forementioned layer-adapted mesh, we obtain the following approximation errors:
Lemma 2
Let \(\Omega _N\) be the layer-adapted mesh (15) with \(\sigma \ge k+1.5\). For the solutions u satisfying (14), the following hold:
where the bounding constant \(C>0\) is independent of \(\varepsilon \) and N.
Proof
The concept is to use Lemma 1 and the decomposition of the solution u in (13), as well as the decomposition
where
for \(0\le j \le k+1\), owing to (14).
(1) Demonstrate (22a). We use the decomposition (13) and the \(L^{\infty }\)-approximation property (6). The overall process is divided into several steps.
Step 1. It is obvious that \(\Vert {{\bar{u}}-{\mathbb {P}}_{\theta }{\bar{u}}}\Vert \le C N^{-(k+1)}\Vert {{\bar{u}}}\Vert _{H^{k+1}(\Omega )} \le CN^{-(k+1)}\) from (21a), (6), and (14).
Step 2. According to (21a) and the trivial inequality \([a^{(\theta )}]^2\le C[(a^{-})^2+ \zeta (a^{+})^2]\) for \(\theta >1/2\), we obtain
where
-
As \(h_j=O(N^{-1})\) for \(j=1,2,\dots ,N/2\), we use (6) and (14) to obtain
$$\begin{aligned} \Lambda _{11}\le&\, C\sum _{j=1}^{\frac{N}{2}} \big [\Vert {u_\varepsilon }\Vert _{I_j}^2 + N^{-1}{\Vert {u_\varepsilon }\Vert ^2_{L^{\infty }(I_j)}} \big ] \le C\int _0^{1-\tau } e^{-\frac{2\alpha (1-x)}{\varepsilon }} dx\nonumber \\&+CN^{-1}e^{-\frac{2\alpha \tau }{\varepsilon }} \le C(\varepsilon +N^{-1})N^{-2(k+1)}, \end{aligned}$$(26)where we use \(\psi (1/2)\le N^{-1}\) and \(\sigma \ge k+1\).
-
Using the \(L^\infty \)-stability (6a) and \(L^\infty \)-approximation property (6b), we obtain
$$\begin{aligned} \Lambda _{12} \le&\, C\sum _{j=\frac{N}{2}+1}^{N}\Big (\sum _{\ell =1}^jh_\ell \zeta ^{j-\ell }\Big ) \Vert {g(u_\varepsilon )}\Vert _{L^{\infty }(I_j)}^2 \le C\sum _{j=\frac{N}{2}+1}^{N}\Big (\sum _{\ell =1}^jh_\ell \zeta ^{j-\ell }\Big ) \nonumber \\&\min \Big \{\Vert { u_{\varepsilon }}\Vert ^2_{L^\infty (I_j)}, h_j^{2(k+1)}\Vert { u_\varepsilon ^{(k+1)}}\Vert ^2_{L^\infty (I_j)} \Big \} \nonumber \\ \le&\, C\sum _{j=\frac{N}{2}+1}^{N}\Big (\sum _{\ell =1}^jh_\ell \zeta ^{j-\ell }\Big ) \Bigg (\min \Big \{\frac{h_j}{\varepsilon },1\Big \} e^{-\frac{\alpha (1-x_j)}{\sigma \varepsilon }}\Bigg )^{2(k+1)}\nonumber \\ \le&C \max _{j=\frac{N}{2}+1,\frac{N}{2}+2,\dots ,N} {\mathscr {G}}_j^{2k+1} \sum _{j=\frac{N}{2}+1}^{N}\Big (\sum _{\ell =1}^jh_\ell \zeta ^{j-\ell }\Big ){\mathscr {G}}_j \nonumber \\ \le&\,CN^{-1}\max _{j=\frac{N}{2}+1,\frac{N}{2}+2,\dots ,N} {\mathscr {G}}_j^{2(k+1)} \sum _{j=1}^{N}{\mathscr {G}}_j \le CN^{-1}(N^{-1}\max |\psi ^\prime |)^{2k+1}, \end{aligned}$$(27)where we use (16).
According to (26) and (27), we obtain \(\Vert {u_\varepsilon -{\mathbb {P}}_{\theta }u_\varepsilon }\Vert \le C(N^{-1}\max |\psi ^{\prime }|)^{k+1}\).
Step 3. We obtain (22a) from the above two steps and the triangle inequality.
(2) Demonstrate (22b). The analysis is similar.
It is obvious that \(\sum _{j=0}^N [\![{{\bar{u}}-{\mathbb {P}}_{\theta }{\bar{u}}}]\!]_j^2 \le CN^{-2k+1}\) from (21b), (6), and (14). We use (21b), (6), and \(\sigma \ge k+1\) to obtain
where (16) is used in the final inequality. Then, (22b) follows.
(3) Demonstrate (22c). We employ the \(L^2\)-approximation property of \(\pi \) to extract a positive power of the \(\varepsilon \)-factor in its upper bound. In this case, we require \(\sigma \ge k+1.5\). The proof is divided into the following steps.
Step 1. According to (21c), the approximation property (6b), and the regularity (24), we easily obtain \(\Vert { {\bar{q}}-{\mathbb {Q}}_{\widetilde{\theta } }{\bar{q}} }\Vert \le C\varepsilon N^{-(k+1)}\).
Step 2. Using (21c), the trivial inequality \(a^{({\tilde{\theta }})}\le C[\zeta (a^{-})^2+ (a^{+})^2]\) for \(\theta >1/2\), bounding can be performed by \(\Vert { q_\varepsilon -{\mathbb {Q}}_{\widetilde{\theta } }q_\varepsilon }\Vert ^2 \le \Lambda _{21} + \Lambda _{22}\) where
-
Using \(h_j\ge h_{j+1}\) (\(j=N/2+1,\dots ,N-1\)) and (6), we obtain
$$\begin{aligned} \Lambda _{21}&\,\le C\sum _{j=1}^{\frac{N}{2}}\Vert {q_\varepsilon }\Vert _{I_j}^2 +C\sum _{j=1}^{\frac{N}{2}+1} h_j|q_\varepsilon (x_{j-1})|^2 \le C\int _0^{1-\tau } e^{-\frac{2\alpha (1-x)}{\varepsilon }} dx\nonumber \\&\quad +Ch_{N/2+1}e^{-\frac{2\alpha \tau }{\varepsilon }} \nonumber \\&\, \le C(\varepsilon +h_{N/2+1})\psi (1/2)^{2\sigma } \le C\varepsilon (N^{-1}+N^{-1}\max |\psi ^\prime |) N^{-2(k+1)}, \end{aligned}$$(28)where we use \(\psi (1/2)\le N^{-1}\), \(\sigma \ge k+1.5\) and
$$\begin{aligned} h_{N/2+1}&\, \le C\varepsilon \big [\varphi (1/2)-\varphi (1/2-1/N)\big ] =C\varepsilon \int _{1/2-1/N}^{1/2} \varphi ^{\prime }(s)ds \nonumber \\&\, =C\varepsilon \int _{1/2-1/N}^{1/2}- \frac{\psi ^{\prime }(s)}{\psi (s)}ds \le C\varepsilon \frac{\int _{1/2-1/N}^{1/2} -\psi ^{\prime }(s)ds}{\psi (1/2)} \le C\varepsilon \frac{N^{-1}\max |\psi ^{\prime }| }{\psi (1/2)}. \end{aligned}$$(29) -
Using \(h_{j}\ge h_{j+1}\) (\(j=N/2+1,\dots ,N-1\)), (6), (24), \(\Vert {e^{-\alpha (1-x)/\varepsilon }}\Vert ^2_{I_j}\le C\varepsilon \min \{h_i/\varepsilon ,1\}e^{-2\alpha (1-x_j)/\varepsilon }\), \(\sigma \ge k+1.5\), and (16), we obtain
$$\begin{aligned} \Lambda _{22}&\,\le C\sum _{j=\frac{N}{2}+1}^N \min \Big \{h_{j}^{2(k+1)} \Vert {q_\varepsilon ^{(k+1)}}\Vert _{I_{j}}, h_{j}|q_\varepsilon (x_{j-1})|^2+\Vert {q_\varepsilon }\Vert ^2_{I_{j}}\Big \} \nonumber \\&\,\le C\sum _{j=\frac{N}{2}+1}^N \min \Big \{\Big (\frac{h_{j}}{\varepsilon }\Big )^{2(k+1)},1\Big \} \Vert {e^{-\frac{\alpha (1-x)}{\varepsilon }}}\Vert _{I_{j}}^2 \nonumber \\&\, \le C\sum _{j=\frac{N}{2}+1}^{N} \varepsilon \Bigg ( \min \Big \{\frac{h_j}{\varepsilon },1\Big \} e^{-\frac{\alpha (1-x_j)}{\sigma \varepsilon }} \Bigg )^{2(k+1.5)} \nonumber \\&\, = C\varepsilon \max _{j=\frac{N}{2}+1,\frac{N}{2}+2,\dots ,N} {\mathscr {G}}_j^{2(k+1)} \sum _{j=\frac{N}{2}+1}^{N}{\mathscr {G}}_j \le C\varepsilon (N^{-1}\max |\psi ^\prime |)^{2(k+1)}. \end{aligned}$$(30)
Then one gets \(\Vert { q_\varepsilon -{\mathbb {Q}}_{\widetilde{\theta } }q_\varepsilon }\Vert \le C\sqrt{\varepsilon } (N^{-1}\max |\psi ^{\prime }|)^{k+1}\).
Step 3. (22c) follows from the above two steps and the triangle inequality.
(4) Demonstrate (22d). We use (21d) and the inequality \(a^{({\tilde{\theta }})}\le C[\zeta (a^{-})^2+ (a^{+})^2]\) for \(\theta >1/2\) to express
Using (24) and a similar argument as in the proof of (22b), we obtain
Then, (22d) follows by combining the estimate \(|({\bar{q}}-{\mathbb {Q}}_{\widetilde{\theta }}{\bar{q}})_N^{-}| \le C\varepsilon (N^{-1}\max |\psi ^\prime |)^{k+1}\). \(\square \)
2.5.2 Proof of Theorem 1
As is usual in finite element analysis, we denote the error as \(\varvec{e} =(q-Q,u-U)\) and divide it into two parts, i.e. \(\varvec{e}=\varvec{w}-\varvec{W}=(\varvec{w}-\varvec{\Pi }\varvec{w})-(\varvec{W}-\varvec{\Pi }\varvec{w}) =\varvec{\eta }-\varvec{\xi }\), with
Using (19) and (20), we obtain
Because u and q are smooth, and the numerical fluxes are consistent, we obtain the Galerkin orthogonality
Taking \(\varvec{\chi }=\varvec{\xi }\) and noting the error decomposition, we determine from (12) that
Using (22), (34), the Cauchy–Schwarz inequality, inverse inequalities (4), and assumption \(b-a^{\prime }/2\ge b_0>0\), we obtain
where \({\overline{a}}=a_j\) on \(I_j\) is a piecewise constant approximation of a. Thus, we can determine from (36) that
Using Lemma 2, we bound \(|||{\varvec{\eta }}|||_{E}\) and arrive at the error estimates in (18). This completes the proof of Theorem 1.
3 GA-LDG method for two-dimensional case
Consider the two-dimensional singularly perturbed convection–diffusion problem
where \(\varvec{a}=(a^1(x,y),a^2(x,y)),b=b(x,y),f=f(x,y)\) are smooth functions that satisfy
for positive constants \(\alpha _1,\alpha _2\) and \(b_0\).
3.1 Discontinuous finite element space
Let \(\Omega _N=\{K_{ij}\}_{i=1,2,\dots ,N_x}^{j=1,2,\dots ,N_y}\) be a rectangular partition of \(\Omega \), where \(K_{ij}=I_i\times J_j\), \(I_i=(x_{i-1},x_i)\), and \(J_j=(y_{j-1},y_j)\), with \(x_0=y_0=0\) and \(x_{N_x}=y_{N_y}=1\). Denote \(h_{x,i}=x_i-x_{i-1}\), \(h_{y,j}=y_j-y_{j-1}\). The discontinuous finite element space is defined as
where \({\mathscr {Q}}^k(K)\) denotes the space of the tensor-product polynomials in K of degree \(k\ge 1\) in each variable. The function in \({\mathscr {W}}_N\) allows discontinuity across the element interfaces. For a function \(v\in {\mathscr {W}}_N\) and \(y\in J_j\), \(j=1,2,\dots ,N_y\), we denote \(v^\pm _{i,y}=\lim _{x\rightarrow x_{i}^\pm }v(x,y)\) according to the traces evaluated from the right element \(K_{i+1,j}\) and left element \(K_{ij}\). For any \((x,y)\in K_{ij}\in \Omega _N\), we denote the jump and weighted average on the interior edge as
As usual, we define \([\![{v}]\!]_{0,y}=v_{0,y}^+\) and \([\![{v}]\!]_{N_x,y}=-v_{N_x,y}^-\). If \(\mu <1/2\), we define \(v^{\mu ,y}_{0,y}=v_{0,y}^+\). If \(\mu >1/2\), we define \(v^{\mu ,y}_{N_x,y}=v_{N_x,y}^-\). Similarly, we can define \([\![{v}]\!]_{x,j}\) and \(v^{x,\mu }_{x,j}\) for \(j=0,1,\dots ,N_y\).
Several inverse inequalities are used in this paper. For any \(v\in {\mathscr {W}}_N\) and \(K_{ij}\in \Omega _N\), the following hold [5]:
where \(C>0\) is a constant that is independent of \(h_{x,i}\), \(h_{y,j}\), and v. In this case,
Two-dimensional local \(L^2\) projection is important and it is defined as follows: For any \(z\in L^2(\Omega )\), \(\Pi z\in {\mathscr {W}}_N\) such that in each element, \(K\in \Omega _{N}\),
Similar to the one-dimensional case, we obtain
where \(|K_{ij}|=h_{x,i} h_{y,j}\) and \(h_{ij}=\max \{h_{x,i},h_{y,j}\}\). Compared to (47), a sharp approximation property exists. The proof is provided in the Appendix.
Lemma 3
For the two-dimensional \(L^2\)-projection \(\Pi \), there holds the approximation property
where \(\varvec{\alpha }=(\alpha _i,\alpha _j)\) is a multi-index, \(|\varvec{\alpha }|=\alpha _i+\alpha _j\), \(\varvec{h}^{\varvec{\alpha }}=h_{x,i}^{\alpha _i}h_{y,j}^{\alpha _j}\), and \(D^{\varvec{\alpha }}=\partial _x^{\alpha _i}\partial _y^{\alpha _j}\).
Analogously, the following conclusion can be reached:
Lemma 4
For each \(K_{ij}\in \Omega _N\), the following holds:
3.2 GA-LDG method
The GA-LDG method for problem (39) is obtained in a similar manner to the above. It provides an approximation for the solution \(\varvec{w}=(p,q,u)\) of an equivalent first-order system,
Its compact form reads: Determine \(\varvec{W}=(P,Q,U)\in {\mathscr {W}}_N^3\equiv {\mathscr {W}}_N\times {\mathscr {W}}_N\times {\mathscr {W}}_N\), such that
where
Letting \(\varvec{\chi }=\varvec{W}\), we obtain an energy norm
3.3 Layer-adapted mesh
Proposition 2
(Theorem 5.1, [19]) Suppose that f satisfies sufficient compatibility conditions. Then, (39) has a classical solution \(u\in C^{k+2,\ell }({\overline{\Omega }})\) and this solution can be decomposed as a smooth term \({\bar{u}}\) and layer components
where for all \(x,y\in [0,1]\), we obtain
for positive integers i, j and \(i+j\le k+2\).
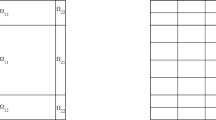
For notational simplification, we assume that \(\alpha _1=\alpha _2=\alpha \), \(N_x=N_y=N\). Then, \(h_{x,i}=h_{y,i}=h_i\). The two-dimensional layer-adapted mesh is formed by a tensor-product mesh with mesh points \((x_i,y_j)\), \(i,j=1,2,\dots ,N\), where \(x_i\) (\(i=1,2,\dots ,N\)) are defined by (15) and \(y_j\) (\(j=1,2,\dots ,N\)) are defined analogously. Let \(x_{N/2}=y_{N/2}=1-\tau \) have four parts:
To gain a visualised understanding, we plot the division of \(\Omega \) and three layer-adapted meshes in Fig. 1, where \(\varepsilon =10^{-2}\) and \(N=16\).

Division of \(\Omega \) and three layer-adapted meshes
3.4 Error estimate
Theorem 2
Let u be the solution to problem (39) that satisfies Proposition 2, and \(U\in {\mathscr {W}}_N\) be the numerical solution to the LDG scheme (51) on a two-dimensional layer-adapted mesh with \(\sigma \ge k+2\). Then,
where
Remark 4
According to (56), we can only obtain the \((k+1/2)\)-th-order error estimate for the \(\varepsilon \)-weighted \(L^2\)-error \(\Vert {u-U}\Vert +\varepsilon ^{-\frac{1}{2}}\Vert {q-Q}\Vert \), which is a half-order inferior to the numerical results.
3.5 Proof of error estimate
The error estimate follows from a similar line to the one-dimensional case. However, the discussion of two-dimensional GGR projections on a layer-adapted mesh is far more complicated. Moreover, owing to the influence of the convection term, the convergence rate may be inferior to that of the one-dimensional case.
3.5.1 GGR projection in two dimensions
Two-dimensional GGR projections can be explained as the tensor product of the one-dimensional projections \({\mathbb {P}}_{\theta }\) and/or \(\pi \); that is,
for \(\theta ,\theta _{1},\theta _{2}>1/2\), where the superscript refers to the spatial direction. Specifically, these projections satisfy the following definitions:
-
1.
For any \(z\in {\mathscr {C}}({\overline{\Omega }}_{N})\), \({\mathbb {P}}_{\theta _{1},\theta _{2}}z\) is the unique element in \({\mathscr {W}}_N\) such that
$$\begin{aligned}&\,\langle {{\mathbb {P}}_{\theta _{1},\theta _{2}}z},{v}\rangle _{K_{ij}} = \langle {z},{v}\rangle _{K_{ij}}, \quad v\in {\mathscr {Q}}^{k-1}(K_{ij}), \end{aligned}$$(58a)$$\begin{aligned}&\,\langle {({\mathbb {P}}_{\theta _{1},\theta _{2}} z)_{i,y}^{\theta _{1},y}},{v}\rangle _{J_j} = \langle { z^{\theta _{1},y}_{i,y}},{v}\rangle _{J_j}, \quad v\in {\mathscr {P}}^{k-1}(J_j), \end{aligned}$$(58b)$$\begin{aligned}&\,\langle {({\mathbb {P}}_{\theta _{1},\theta _{2}} z)_{x,j}^{x,\theta _{2}}},{v}\rangle _{I_i} = \langle { z^{x,\theta _{2}}_{x,j}},{v}\rangle _{I_i}, \quad v\in {\mathscr {P}}^{k-1}(I_i), \end{aligned}$$(58c)$$\begin{aligned}&\,\big ({\mathbb {P}}_{\theta _{1},\theta _{2}} z\big )_{i,j}^{\theta _{1},\theta _{2}} =z^{\theta _{1},\theta _{2}}_{i,j}, \end{aligned}$$(58d)hold for any \(i,j=1,2,\cdots ,N_x\). Here, \(z_{i,y}^{\theta _{1},y}\) and \(z_{x,j}^{x,\theta _{2}}\) are assumed as previously and
$$\begin{aligned} z^{\theta _{1},\theta _{2}}_{i,j} =&\,\theta _{1}\theta _{2}z(x^-_{i},y^-_{j}) + \theta _{1}{\widetilde{\theta _{2}}} z(x^-_{i},y^+_{j}) + {\widetilde{\theta _{1}}}\theta _{2}z(x^+_{i},y^-_{j}) +{\widetilde{\theta _{1}}}{\widetilde{\theta _{2}}} z(x^+_{i},y^+_{j}). \end{aligned}$$Note that we understand \(\theta _{1}=1\) (or \(\theta _{2}=1\)) at \(i= N\) (or \(j= N\)).
-
2.
For any \(z\in {\mathscr {C}}({\overline{\Omega }}_{N})\), \({\mathbb {Q}}_{{\widetilde{\theta }},1/2} z\) is the unique element in \({\mathscr {W}}_N\) such that
$$\begin{aligned}&\,\langle {{\mathbb {Q}}_{{\widetilde{\theta }},1/2} z},{v}\rangle _{K_{ij}} = \langle { z},{v}\rangle _{K_{ij}}, \quad v\in {\mathscr {P}}^{k-1}(I_{i})\otimes {\mathscr {P}}^{k}(J_{j}), \end{aligned}$$(59a)$$\begin{aligned}&\,\langle {({\mathbb {Q}}_{{\widetilde{\theta }},1/2}z)^{{\widetilde{\theta }},y}_{i-1,y}},{v}\rangle _{J_j} = \langle {z^{{\widetilde{\theta }},y}_{i-1,y}},{v}\rangle _{J_j}, \quad v\in {\mathscr {P}}^{k}(J_j), \end{aligned}$$(59b)hold for any \(i,j=1,2, \ldots , N\). We understand \({\widetilde{\theta }}=0\) at the edge \((x_{0},y)\) for \(y\in J_j\).
-
3.
For any \(z\in {\mathscr {C}}({\overline{\Omega }}_{N})\), \({\mathbb {Q}}_{1/2,{\widetilde{\theta }}} z\) is the unique element in \({\mathscr {W}}_N\) such that
$$\begin{aligned}&\,\langle {{\mathbb {Q}}_{1/2,{\widetilde{\theta }}} z},{v}\rangle _{K_{ij}} = \langle { z},{v}\rangle _{K_{ij}}, \quad v\in {\mathscr {P}}^{k}(I_{i})\otimes {\mathscr {P}}^{k-1}(J_{j}), \end{aligned}$$(60a)$$\begin{aligned}&\,\langle {({\mathbb {Q}}_{1/2,{\widetilde{\theta }}}z)^{x,{\widetilde{\theta }}}_{x,j-1}},{v}\rangle _{I_i} = \langle {z^{x,{\widetilde{\theta }}}_{x,j-1}},{v}\rangle _{I_i}, \quad v\in {\mathscr {P}}^{k}(I_i), \end{aligned}$$(60b)hold for any \(i,j=1,2, \ldots , N\). We understand \({\widetilde{\theta }}=0\) at the edge \((x,y_{0})\) for \(x\in I_i\).
The unique existence and approximation properties of the above on the quasi-uniform mesh were discussed in [9]. However, their stabilities and approximation properties are unknown for the general mesh. The following lemma provides a general estimate for GGR projections on the general meshes in terms of the local \(L^2\)-projection error. The detailed proofs are technical and lengthy, and we defer these to the Appendix.
Lemma 5
For any \(z\in {\mathscr {C}}({\overline{\Omega }}_{N})\), let \(g(z)=z-\Pi z\) be the local \(L^2\)-projection error. Then,
where \(\zeta _i=|{\widetilde{\theta }}_i/\theta _i|<1\) (\(i=1,2\)) and the bounding constant \(C>0\) is independent of \(\varepsilon \) and N. Similar estimates hold for \(z-{\mathbb {Q}}_{1/2,{\widetilde{\theta _{2}}}} z\).
As an application of Lemma 5 for the solution that satisfies Proposition 2 and the previous two-dimensional layer-adapted mesh, we obtain the following approximation errors:
Lemma 6
Let \(\Omega _N\) be the two-dimensional layer-adapted mesh with \(\sigma \ge k+1.5\). For the solution u that satisfies (55), we obtain
where the bounding constant \(C>0\) is independent of \(\varepsilon \) and N. Similar estimates hold for \(q-{\mathbb {Q}}_{1/2,{\widetilde{\theta _{2}}}} q\).
Proof
As the analysis line is similar, we only present the proof for (62a), and omit the details for the other cases.
Prior to this, we mention one frequently used inequality. According to the definition of the weighted average, we obtain
where \(\zeta _1 = 0\) (\(\zeta _2 = 0\)) if \(i=N\) (\(j=N\)).
In the following, we demonstrate (62a) by using the solution decomposition \(u = {\bar{u}}+u_{21}+u_{12}+u_{22}\). The overall process is divided into several steps.
Step 1. It is easy to demonstrate that \(\Vert {{\bar{u}}-{\mathbb {P}}_{\theta _{1},\theta _{2}} {\bar{u}}}\Vert \le CN^{-(k+1)}\) for the smooth component \({\bar{u}}\).
Step 2. Using (63) and (61a), we obtain
where
-
Owing to (55) and \(\sigma \ge k+1\), we obtain
$$\begin{aligned} S_{11}\le&\, C\sum _{K_{ij}\in \Omega _{11}\cup \Omega _{12}} \Big [ \int _{K_{ij}} e^{-\frac{2\alpha (1-x)}{\varepsilon }} dxdy + N^{-2} e^{-\frac{2\alpha (1-x_i)}{\varepsilon }} \Big ] \nonumber \\ \le&\, C\Bigg [ \int _{\Omega _{11}\cup \Omega _{12}} e^{-\frac{2\alpha (1-x)}{\varepsilon }} dxdy +\sum _{j=1}^N N^{-1} \Big (\int _{0}^{1-\tau } e^{-\frac{2\alpha (1-x)}{\varepsilon }} dx + N^{-1} e^{-\frac{2\alpha \tau }{\varepsilon }} \Big ) \Bigg ] \nonumber \\ \le&\, C(\varepsilon + N^{-1}) N^{-2(k+1)}. \end{aligned}$$(64) -
Obviously, \(|K_{ij}|\le CN^{-1} \sum _{\ell _1=1}^i h_{\ell _1}\zeta _1^{i-\ell _1}\). According to the \(L^\infty \)-stability (45) and \(L^\infty \)-approximation (48), we obtain
$$\begin{aligned} S_{12}\le&\, C\sum _{K_{ij}\in \Omega _{21}\cup \Omega _{22}} N^{-1} \sum _{\ell _1=1}^i h_{\ell _1}\zeta _1^{i-\ell _1} \Vert {g(u_{21})}\Vert ^2_{L^{\infty }(K_{ij})} \nonumber \\ \le&\, C\sum _{K_{ij}\in \Omega _{21}\cup \Omega _{22}} N^{-1} \sum _{\ell _1=1}^i h_{\ell _1}\zeta _1^{i-\ell _1} \min \Big \{ \Vert {u_{21}}\Vert ^2_{L^{\infty }(K_{ij})},\nonumber \\&\sum _{|\varvec{\alpha }|=1}\varvec{h}^{2(k+1)\varvec{\alpha }} \Vert {D^{(k+1)\varvec{\alpha }}u_{21}}\Vert ^2_{L^\infty (K_{ij})} \Big \} \nonumber \\ \le&\, C\sum _{K_{ij}\in \Omega _{21}\cup \Omega _{22}} N^{-1} \sum _{\ell _1=1}^i h_{\ell _1}\zeta _1^{i-\ell _1} \min \Big \{ 1, \Big (\frac{h_i}{\varepsilon }\Big )^{2(k+1)}+h_j^{2(k+1)} \Big \} e^{-\frac{2\alpha (1-x_i)}{\varepsilon }} \nonumber \\ \le&\, C\max _{i=\frac{N}{2}+1,\frac{N}{2}+2,\dots ,N} {\mathscr {G}}_i^{2(k+1)} \sum _{K_{ij}\in \Omega _{21}\cup \Omega _{22}} N^{-1} \sum _{\ell _1=1}^i h_{\ell _1}\zeta _1^{i-\ell _1} \nonumber \\ \le&\, C(N^{-1}\max |\psi ^{\prime }|)^{2(k+1)}, \end{aligned}$$(65)where we use (55), \(h_i\ge C\varepsilon N^{-1} \ge C\varepsilon h_j\), \(\sigma \ge k+1\) and (16).
Summing (64) and (65) yields \(\Vert {u_{21}-{\mathbb {P}}_{\theta _{1},\theta _{2}} u_{21}}\Vert \le C(N^{-1}\max |\psi ^{\prime }|)^{k+1}\).
Step 3. Similarly, we obtain \(\Vert {u_{12}-{\mathbb {P}}_{\theta _{1},\theta _{2}} u_{12}}\Vert \le C(N^{-1}\max |\psi ^{\prime }|)^{k+1}\).
Step 4. We bound the term \(\Vert {u_{22}-{\mathbb {P}}_{\theta _{1},\theta _{2}} u_{22}}\Vert \), which is given by
where
-
The estimate for \(S_{21}\) is similar to (64). That is, \(S_{21}\le C(\varepsilon + N^{-1}) N^{-2(k+1)}\).
-
For the term \(S_{22}\), we obtain
$$\begin{aligned} S_{22}\le&\, C\sum _{K_{ij}\in \Omega _{22}} \sum _{\ell _1=1}^i \sum _{\ell _2=1}^j h_{\ell _1} h_{\ell _2}\zeta _1^{i-\ell _1}\zeta _2^{j-\ell _2} \Vert {g(u_{22})}\Vert ^2_{L^{\infty }(K_{ij})}\\ \le&\, C\sum _{K_{ij}\in \Omega _{22}} \sum _{\ell _1=1}^i \sum _{\ell _2=1}^j h_{\ell _1} h_{\ell _2}\zeta _1^{i-\ell _1}\zeta _2^{j-\ell _2} \min \Big \{ \Vert {u_{22}}\Vert ^2_{L^{\infty }(K_{ij})},\\&\sum _{|\varvec{\alpha }|=1}\varvec{h}^{2(k+1)\varvec{\alpha }} \Vert {D^{(k+1)\varvec{\alpha }}u_{22}}\Vert ^2_{L^\infty (K_{ij})} \Big \} \\ \le&\, C\sum _{K_{ij}\in \Omega _{22}} \sum _{\ell _1=1}^i \sum _{\ell _2=1}^j h_{\ell _1} h_{\ell _2}\zeta _1^{i-\ell _1}\zeta _2^{j-\ell _2} \min \Bigg \{ 1, \Big (\frac{h_i}{\varepsilon }\Big )^{2(k+1)} +\Big (\frac{h_j}{\varepsilon }\Big )^{2(k+1)} \Bigg \}\\&e^{-\frac{2\alpha [(1-x_i)+(1-y_j)]}{\varepsilon }} \\ \le&\, C\sum _{K_{ij}\in \Omega _{22}} \sum _{\ell _1=1}^i \sum _{\ell _2=1}^j h_{\ell _1} h_{\ell _2}\zeta _1^{i-\ell _1}\zeta _2^{j-\ell _2} \Big [ {\mathscr {G}}_i^{2(k+1)} +{\mathscr {G}}_j^{2(k+1)} \Big ] \\ \le&\, C(N^{-1}\max |\psi ^{\prime }|)^{2(k+1)}, \end{aligned}$$where we use a trivial inequality \(\min \{1,a+b\} \le \min \{1,a\} +\min \{1,b\}\) and
$$\begin{aligned} e^{-2[\alpha _1(1-x_i)+\alpha _2(1-y_j)]/\varepsilon } \le \min \{e^{-2\alpha _1(1-x_i)/\varepsilon }, e^{-2\alpha _2(1-y_j)/\varepsilon }\}. \end{aligned}$$
Thus, we obtain \(\Vert {u_{22}-{\mathbb {P}}_{\theta _{1},\theta _{2}} u_{22}}\Vert \le C(N^{-1}\max |\psi ^{\prime }|)^{k+1}\).
Summing each estimate yields (62a).
\(\square \)
The following conclusion is crucial in the derivation of the optimal and uniform convergence rate for the two-dimensional case.
Lemma 7
Let \(\eta _u=u-{\mathbb {P}}_{\theta _{1},\theta _{2}} u\). For any \(v\in {\mathscr {W}}_N\), the following holds:
where
A similar conclusion holds for \(\Upsilon ^2\), which is defined analogously for another direction.
Proof
Following the proof line of identity (3.40) in Lemma 3.6 of [9], we obtain
where \({\mathscr {P}}^{k+1}(\Omega _N)\) is made up of all piecewise polynomials of a degree that is at most \(k+1\) on each element in \(\Omega _N\).
Using the Cauchy–Schwarz inequality and inverse inequalities of (43), we obtain
Following the same idea as that in (61a), we obtain
because \(h_j \le \sum _{\ell _2=1}^j h_{\ell _2} \zeta _2^{j-\ell _2}\) and \(\sum _{\ell _1=1}^i h_{\ell _1}^{-1} \zeta _1^{i-\ell _1} \le h_i^{-1}\). Moreover, using the fact that \((u-{\mathbb {P}}_{\theta _{1},\theta _{2}} u)^{\theta _{1},y}_{i,y} =u_{i,y} -{\mathbb {P}}_{\theta _{2}}^y u_{i,y}\) and (21a), we obtain
Thus, we obtain
According to the \(L^{\infty }\)-stability (45), we immediately obtain
However, using (67) and Lemma 4 yields
Together, (68) and (69) lead to (66).
\(\square \)
3.5.2 Proof of Theorem 2
Based on the properties that have been established for the above two-dimensional GGR projections and the concept of [8], Theorem 2 can be proven. As some of the arguments are similar, we only note the main difference and omit several details.
A key factor is to use the GGR projections in the error decomposition. That is, the error is decomposed into two parts \(\varvec{e}=\varvec{w}-\varvec{W}=(\varvec{w}-\varvec{\Pi }\varvec{w})-(\varvec{W}-\varvec{\Pi }\varvec{w}) =\varvec{\eta }-\varvec{\xi }\), where
Using the Galerkin orthogonality, we obtain
We demonstrate that
for any test function \(\varvec{\chi }\in {\mathscr {W}}_N^3\), where
In this case, \(\hbar _{ij}=\min \{h_i,h_j\}\), \({\tilde{h}}_{ij}=\min \{\hbar _{ij},\hbar _{i+1,j},\hbar _{i,j+1}\}\).
The first line in (52) is denoted by \(|{\mathscr {T}}_1(\varvec{W};\varvec{\chi })|\), the second line is denoted by \(|{\mathscr {T}}_2(U;\varvec{\chi })|\), the sum of the third and fourth lines is denoted by \(|{\mathscr {T}}_3(\varvec{W};v)|\), and the sum of the fifth and sixth lines is denoted by \(|{\mathscr {T}}_4(U;v)|\).
Regarding Lemma 6 and the definition of the GGR projection, we bound both \(|{\mathscr {T}}_1(\varvec{\eta };\varvec{\chi })|\) and \(|{\mathscr {T}}_3(\varvec{\eta };v)|\) by
\(C(N^{-1}\max |\psi ^{\prime }|)^{k+1}|||{\varvec{\chi }}|||_{E}\).
To bound \({\mathscr {T}}_2(\eta _u;\varvec{\chi })\), we use \(u=0\) on \(\partial \Omega \) to express
To bound \(\Upsilon ^1(u,s)\), we analyse it for each component. Note that \(h_{i}\ge C\varepsilon N^{-1}\ge C\varepsilon h_{j}\) for any \(i,j=1,2,\dots ,N\), and we determine from (66) that
Furthermore, (66) yields
where
For \(L_1\), we use (55), \(h_{i}\ge C\varepsilon N^{-1}\), and \(\sigma \ge k+2\) to obtain
For \(L_2\), we obtain
Analogously, we can estimate \(\Upsilon ^1(\varphi ,s)\) for \(\varphi =u_{12}, u_{22}\). Thus, we conclude that
The estimation on \({\mathscr {T}}_4(\eta _u;v)\) is similar to that in [8] when noting (62c). That is,
This proves (72).
Following similar arguments to those in [8], we obtain
Using Lemma 6, we bound \(|||{\varvec{\eta }}|||_{E}\) and arrive at an estimation on \(|||{\varvec{w}-\varvec{W}}|||_{E}\) by means of the triangle inequality. This completes the proof of Theorem 2.
4 Numerical experiments
Consider a two-dimensional problem
with the exact solution
We employ the GA-LDG method (10) on layer-adapted meshes with \(\sigma =k+2\), \(\alpha _1=2\), and \(\alpha _2=3\) to verify the theoretical result from Theorem 2. We consider \(\varepsilon =10^{-6}\), and compute the convergence rate as follows:
where \(E_N\) is the \(\varepsilon \)-weighted \(L^2\)-error or the energy error. In this case, the subscript 2 is used to reflect the convergence rate regarding the BS-mesh and B-mesh, and the subscript S is used to reflect the convergence rate regarding the S-mesh.
In Table 2, we list the \(L^2\)-errors as well as their convergence orders on the three mesh types. Almost \((k+1)\)-th convergence rates can be observed for the different flux parameters. Table 3 displays the energy errors as well as their orders. It can be observed that the convergence rate converges to nearly \((k+1/2)\), which confirms our estimate (56).
Change history
07 February 2022
A Correction to this paper has been published: https://doi.org/10.1007/s10092-022-00455-8
References
Apel, T.: Anisotropic finite elements: local estimates and applications. Advances in Numerical Mathematics, B.G. Teubner, Stuttgart, (1999)
Bakhvalov, N.: The optimalization of methods of solving boundary value problems with a boundary layer. USSR Comput. Math. Math. Phys. 9(4), 139–166 (1969)
Bassi, F., Rebay, S.: A high-order accurate discontinuous finite element method for the numerical solution of the compressible Navier-Stokes equations. J. Comput. Phys. 131, 267–279 (1997)
Burman, E., Guzman, J., Leykekhman, D.: Weighted error estimates of the continuous interior penalty method for singularly perturbed problems. IMA J. Numer. Anal. 29, 284–314 (2009)
Brenner, S.C., Scott, L.R.: The mathematical theory of finite element methods. Springer, New York (2008)
Castillo, P., Cockburn, B., Schötzau, D., Schwab, C.: Optimal a priori error estimates for the hp-version of the local discontinuous Galerkin method for convection-diffusion problems. Math. Comp. 71(238), 455–478 (2002)
Castillo, P., Cockburn, B., Perugia, I., Schötzau, D.: An a priori error analysis of the local discontinuous Galerkin method for elliptic problems. SIAM J. Numer. Anal. 38(5), 1676–1706 (2000)
Cheng,Y.; Mei, Y.J.; Roos, H.G.: The local discontinuous Galerkin method on layer-adapted meshes for time-dependent singularly perturbed convection-diffusion problems. ArXiv:2012.03560, http://arxiv.org/abs/2012.03560
Cheng, Y., Meng, X., Zhang, Q.: Application of generalized Gauss-Radau projections for the local discontinuous Galerkin method for linear convection-diffusion equations. Math. Comp. 86(305), 1233–1267 (2017)
Cheng, Y., Zhang, Q.: Local analysis of the local discontinuous Galerkin method with generalized alternating numerical flux for one-dimensional singularly perturbed problem. J. Sci. Comput. 72, 792–819 (2017)
Cockburn, B., Dong, B.: An analysis of the minimal dissipation local discontinuous Galerkin method for convection-diffusion problems. J. Sci. Comput. 32(2), 233–262 (2007)
Cockburn, B., Kanschat, G., Perugia, I., Schötzau, D.: Superconvergence of the local discontinuous Galerkin method for elliptic problems on Cartesian grids. SIAM J. Numer. Anal. 39(1), 264–285 (2001)
Cockburn, B., Shu, C.W.: The local discontinuous Galerkin method for time-dependent convection-diffusion systems. SIAM J. Numer. Anal. 35(6), 2440–2463 (1998)
Cockburn, B., Shu, C.W.: Runge-Kutta discontinuous Galerkin methods for convection-dominated problems. J. Sci. Comput. 16(3), 173–261 (2001)
Franz, S., Matthies, G.: A unified framework for time-dependent singularly perturbed with discontinuous Galerkin method in time. Math. Comp. 87, 2113–2132 (2018)
Han, H., Kellogg, R.B.: Differentiability properties of solutions of the equation \(-\varepsilon \Delta u+ru=f(x, y)\) in a square. SIAM J. Math. Anal. 21, 394–408 (1990)
Knobloch, P., Lube. G.: Local projection stabilization for advection-diffusion-reaction problems: one-level vs. two-level approach, Appl. Numer. Math., 59(12), 2891–2907 (2009)
Liu, H., Ploymaklam, N.: A local discontinuous Galerkin method for the Burgers-Poisson equation. Numer. Math. 129, 321–351 (2015)
Linß, T., Stynes, M.: Asymptotic analysis and Shishkin-type decomposition for an elliptic convection-diffusion problem. J. Math. Anal. Appl. 261, 604–632 (2001)
Linß, T., Stynes, M.: The SDFEM on Shishkin meshes for linear convection-diffusion problems. Numer. Math. 87, 457–484 (2001)
Linß, T.: Layer-adapted meshes for convection-diffusion problems. Comput. Methods Appl. Mech. Engrg. 192(9–10), 1061–1105 (2003)
Ma, G., Stynes, M.: A direct discontinuous Galerkin finite element method for convection-dominated two-point boundary value problems. Numer. Alogr. 83, 741–765 (2020)
Meng, X., Shu, C.W., Wu, B.: Optimal error estimates for discontinuous Galerkin methods based on upwind-biased fluxes for linear hyperbolic equations. Math. Comp. 85(299), 1225–1261 (2016)
Li, J., Zhang, D., Meng, X., Wu, B.: Analysis of local discontinuous Galerkin methods with generalized numerical fluxes for linearized KdV equations. Math. Comp. 89(325), 2085–2111 (2020)
Roos, H.G., Stynes, M., Tobiska, L.: Robust numerical methods for singularly perturbed differential equations. Springer, Berlin (2008)
Shishkin, G.: Grid approximation of singularly perturbed elliptic and parabolic equations (Second doctorial thesis). Keldysh Institute, Moscow (1990).. ((in Russian))
Stynes, M., Tobiska, L.: The SDFEM for a convection-diffusion problem with a boundary layer: optimal error analysis and enhancement of accuracy. SIAM J. Numer. Anal. 41(5), 1620–1642 (2003)
Vlasak, M., Roos, H.-G.: An optimal uniform a priori error estimate for an unsteady singularly preturbed problem. Int. J. Numer. Anal. Model. 11, 24–33 (2014)
Xie, Z., Zhang, Z., Zhang, Z.: A numerical study of uniform superconvergence of LDG method for solving singularly perturbed problems. J. Comput. Math. 27(2–3), 280–298 (2009)
Xu, Y., Shu, C.W.: Local discontinous Galerkin methods for high-order time-dependent partial differetial equations. Commun. Comput. Phys. 7, 1–46 (2010)
Zarin, H., Roos, H.G.: Interior penalty discontinuous approximations of convection-diffusion problems with parabolic layers. Numer. Math. 100, 735–759 (2005)
Zhu, H., Zhang, Z.: Local error estimates of the LDG method for 1-D singularly perturbed problems. Int. J. Numer. Anal. Mod. 10(2), 350–373 (2013)
Zhu, H., Zhang, Z.: Convergence analysis of the LDG method applied to singularly perturbed problems. Numer. Methods Partial Differ. Equ. 29(2), 396–421 (2013)
Zhu, H., Zhang, Z.: Uniform convergence of the LDG method for a singularly perturbed problem with the exponential boundary layer. Math. Comp. 83(286), 635–663 (2014)
Acknowledgements
This study was supported by the National Natural Science Foundation of China (No. 11801396) and the Natural Science Foundation of Jiangsu Province (No. BK20170374). The authors wish to thank the anonymous referees for their valuable comments and suggestions that helped to improve this article.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
In this section, we present the technical proofs for Lemma 1, Lemma 3, and Lemma 5.
Proof of Lemma 1
Denote \(E={\mathbb {P}}_{\theta } z-\pi z\). From (19), we obtain
As \(E\in V_N\), we can express
where \(P_{\ell ,m}(x)={\hat{P}}_m((2x-x_\ell -x_{\ell -1})/h_\ell ) ={\widehat{P}}_{m}({\hat{x}})\). In this case, \({\widehat{P}}_{m}({\hat{x}})\) is the standard Legendre polynomial of degree m on \([-1,1]\). Owing to (80a) and the orthogonality of Legendre polynomials, we obtain
Based on (80b) and \({\widehat{P}}_k(\pm 1)=(\pm 1)^k\), we obtain an algebraic system of linear equations:
which is denoted by \({\mathbb {A}}_{\theta _{1}} \mathbf {\alpha } = \mathbf {b}\). This linear system is uniquely solvable owing to \(\theta >1/2\). This results in the unique determination of E(x), and thus, \({\mathbb {P}}_{\theta } z\). Moreover, we can solve out \(\alpha _{N,k}=g(z)^{-}_{N}\) and
where \(\zeta =|{\widetilde{\theta }}/\theta |<1\) for \(\theta >1/2\). Using the Cauchy–Schwarz inequality and \(\zeta <1\), we obtain
for any \(\ell =1,2,\dots ,N\). Owing to \(\sum _{\ell =1}^N\sum _{j=\ell }^{N}a_{j\ell } =\sum _{j=1}^N\sum _{\ell =1}^{j}a_{j\ell }\), from (84) and (85), we determine that
This leads to (21a)-(21b) after using the triangle inequality. The proofs for the remaining cases are similar and are thus omitted. \(\square \)
Proof of Lemma 3
First, we demonstrate that for \(s>1\) and the local \(L^2\)-projection \({\hat{\Pi }}:C(\overline{{\hat{K}}})\rightarrow {\mathscr {Q}}^k({\hat{K}})\),
where \({\hat{K}}=(-1,1)^2\) is a reference element and \(C>0\) is a generic constant.
In fact, for \(s>1\), \(H^{s}({\hat{K}})\hookrightarrow L^{\infty }({\hat{K}})\). It is obvious that \({\hat{\Pi }}\) is a linear operator. Let \(j=\mathrm {dim} \,{\mathscr {Q}}^k({\hat{K}})=(k+1)^2\). For any \({\hat{z}}\in H^{s}({\hat{K}})\), we define the linear functional \(F_m\) as
where \(\{{\hat{\phi }}_m\}\) is the basis of \({\mathscr {Q}}^k({\hat{K}})\). Subsequently,
which implies that \(F_m\in (H^{s}({\hat{K}}))^{\prime }\). According to the definition, we obtain \(F_m({\hat{z}}-{\hat{\Pi }}{\hat{z}})=0\) for any \({\hat{z}} \in C(\overline{{\hat{K}}})\cap H^s({\hat{K}})\) and \(m=1,\dots ,j\). Moreover, for \({\hat{z}} \in {\mathscr {Q}}^k({\hat{K}})\), we obtain
This leads to (86) as an application of Lemma 2.2 of [1].
Second, we use the fact that \(\Pi w=w\) for any \(w\in {\mathscr {W}}_N\), (86), scaling arguments, and Lemma 2.12 of [1] to obtain
This completes the proof. \(\square \)
Proof of Lemma 5
The proofs are reliant on a careful investigation on the structure of these projections from their definitions. We only present the proof for (61a) and do not mention the other cases.
Denote \(E={\mathbb {P}}_{\theta _{1},\theta _{2}}z-\Pi z\). As \(E\in {\mathscr {W}}_N\), we obtain the following orthogonal expansion:
where \(P_{\ell _1,m_1} (x) ={\widehat{P}}_{m_1}({\hat{x}})\), \(P_{\ell _2,m_2} (y) ={\widehat{P}}_{m_2}({\hat{y}})\) with \({\hat{x}}=(2x-x_{\ell _1}-x_{\ell _1-1})/h_{x,\ell _1}\) and \({\hat{y}}=(2y-y_{\ell _2}-y_{\ell _2-1})/h_{y,\ell _2}\).
Owing to (58a) and the orthogonality of the Legendre polynomials, we further obtain
The terms on the right-hand side are denoted by \(E_1\), \(E_2\), and \(E_0\), respectively.
In the following, we wish to bound these one by one. First, we introduce several notations
for any \(i,j=1,2,\cdots ,N\) and \(\ell _1,\ell _2=0,1,\cdots ,k\).
Owing to (58b), we can solve \(E_1\) from the linear system
for any fixed \(\ell _2=1,2,\dots ,N\) and \(m_2=0,1,\dots ,k-1\), where \({\mathbb {A}}_{\theta _{1}}\) is given by (82) and the element in \(\mathbf {b}_{x,\ell _2,k,m_2}\) is given by
According to an analogous estimate to that in (84), we obtain
Similarly, we obtain
The undetermined coefficients \(\alpha _{\ell _1,\ell _2,k,k}\) in the final component \(E_{0}\) can be solved from the final condition (58d), which forms a linear system
where the element in \(\mathbf {b}_{x,y,k,k}\) is denoted by
According to the property of the tensor-product matrix, the Cauchy–Schwarz inequality, and \(0<\zeta _1,\zeta _2<1\), we determine from (94) that
Subsequently, we obtain
where we use (95) and express \(\Gamma _i\) as
In this case, we use \(0<\zeta _1,\zeta _2<1\) and exchange the sequence of the sum in \(\Gamma _1\).
To bound \(\Gamma _2\), we first use (90), (84), the Cauchy–Schwarz inequality, and \(0<\zeta _1<1\) to obtain
for any fixed \(j=1,2,\dots ,N\) and \(m_2=0,1,\dots ,k-1\). Then, we deal with the weighted average in a similar manner as before and use the Cauchy–Schwarz inequality to obtain
where we use a trivial inequality \(f(x)=(x+1)\zeta ^{x/2}\le C\) for \(x\ge 0\) and \(0<\zeta <1\). Exchanging the sequence of the sum yields
Analogously, we can estimate \(\Gamma _3\). Summing each estimate results in (61a). \(\square \)
Rights and permissions
About this article

Cite this article
Cheng, Y., Mei, Y. Analysis of generalised alternating local discontinuous Galerkin method on layer-adapted mesh for singularly perturbed problems. Calcolo 58, 52 (2021). https://doi.org/10.1007/s10092-021-00445-2
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10092-021-00445-2
Keywords
- Local discontinuous Galerkin method
- Singularly perturbed
- Layer-adapted mesh
- Uniform convergence
- Generalised alternating numerical flux
- Generalised Gauss–Radau projection