
Abstract
Many animals acquire otherwise inaccessible food with the aid of sticks and occasionally water. As an exception, some reports suggest that elephants manipulate breathing through their trunks to acquire inaccessible food. Here, we report on two female Asian elephants (Elephas maximus) in Kamine Zoo, Japan, who regularly blew to drive food within their reach. We experimentally investigated this behaviour by placing foods in inaccessible places. The elephants blew the food until it came within accessible range. Once the food was within range, the elephants were increasingly less likely to blow as the distance to the food became shorter. One subject manipulated her blowing duration based on food distance: longer when the food was distant. These results suggest that the elephants used their breath to achieve goals: that is, they used it not only to retrieve the food but also to fine-tune the food position for easy grasping. We also observed individual differences in the elephants’ aptitude for this technique, which altered the efficiency of food acquisition. Thus, we added a new example of spontaneous behaviour for achieving a goal in animals. The use of breath to drive food is probably unique to elephants, with their dexterous trunks and familiarity with manipulating the act of blowing, which is commonly employed for self-comfort and acoustic communication.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Many animals acquire otherwise inaccessible food with the aid of sticks (e.g. rodents: Okanoya et al. 2008; corvids: Taylor et al. 2010; elephants: personal observations; primates: Giudice and Pavé 2007; Pollack 1998; Lethmate 1982. For recent reviews, see Bentley-Condit and Smith 2010; Shumaker et al. 2011) and occasionally with water (e.g. archerfish: e.g. Bekoff and Dorr 1976; stingrays Potamotrygon castexi: Kuba et al. 2010; orangutans Pongo abelii: Mendes et al. 2007). However, some reports suggest that elephants manipulate their breathing through their trunks to acquire inaccessible food (Jesse 1834 cited in Romanes 1883; Darwin 1874; Nissani 2004). Darwin (1874) reported that when a small object was inaccessible, an elephant blew on the ground beyond the object such that “the current reflected on all sides may drive the object within his reach”. It is important to investigate how elephants use blowing to achieve goals because a detailed analysis of this phenomenon will provide extremely rare data on how animals manipulate invisible and low-resistance pneumatics. However, researchers have had few opportunities to study elephants that spontaneously blow to acquire inaccessible food. Here, we report two captive Asian elephants (Elephas maximus) that regularly blew to drive food items within their reach (Fig. 1). By placing foods in inaccessible locations, we observed how elephants blow to drive food. Our main purpose was to determine whether this behaviour was goal-directed. If it was, the elephants might change their behaviour according to the distance to the food: that is, they would blow frequently when the food was still distant (even if the food was within reach) and until the food came close enough to grasp easily. To test this idea, the relationship between food distance and behaviour (blowing or grasping) was investigated. We further investigated individual differences in aptitude for this technique and the efficiency of food acquisition. Based on these results, we discuss whether blowing can be regarded as tool use, and cognitive underpinnings of this behaviour.

Mineko blowing at bamboo
Materials and methods
Subjects and housing
Our subjects were two female Asian elephants, Mineko and Suzuko, born in 1981 and 1980 in Myanmar, and both transported to Japan in 1987. They reside in Kamine Zoo, Ibaraki Prefecture, Japan. One individual (Mineko) was regularly seen blowing to acquire otherwise inaccessible foods, while the first author observed them for another study in 2011 (six times by all occurrence measures over a 12.8-h observation; Martin and Bateson 1986). Note that Suzuko was not observed doing this behaviour during the same observation, although this short observation precluded our knowing whether Suzuko was able to acquire food by blowing. Behavioural observations of aggressive behaviour suggested that Mineko was dominant over Suzuko. Neither elephant has been the subject of previous behavioural or cognitive experiments. They have been kept under “free contact” conditions, wherein zookeepers enter the enclosures and share direct contact with the elephants. For treatment and management, both elephants have received daily behavioural training (lying, standing, lifting a foot, walking with a keeper, etc., following keepers’ commands).
Experimental setting
The experiment was conducted for 32 days from late August to early October 2013. Each day, the subjects were released into the outdoor exhibition compound (approximately 38 × 15 m), which was surrounded by a dry moat (2 m depth). The foods were placed in two areas (locations a and b, separated by 4 m) within a U-shaped ditch (50 cm width, 1.8 and 1.3 cm maximum depth, respectively, and minimum distances of 150 and 155 cm from the compound) of the dry moat. This means that two subjects could attempt to acquire food at the same time in separate areas.
We used five types of food (apples, bamboo, hay, fallen leaves, and potatoes). The subjects had regularly consumed all of these foods prior to the experiment. The foods varied in size and weight, although we attempted to minimise these differences (Table 1). Apples and potatoes were not altered. Bamboo (6 to 7 cm diameter) was cut into 15 to 20 cm lengths. Hay was offered in volumes of approximately 40 × 60 cm, and fallen leaves were measured using a basket (25 × 40 × 15 cm). We used mostly the leaves of cherry and Japanese zelkova trees, as they grew around the compound, and the subjects were already familiar with them.
Apples, bamboo, and potatoes were placed sideways-on in locations a and b at a distance of 180 cm from the compound prior to the respective sessions (defined as “initial position”). Hay was placed so that its nearest side was 170 cm from the compound. Fallen leaves were scattered over a range that encompassed locations a and b and that spanned both accessible and inaccessible distances. Leaves were occasionally moved by wind, but we did not fix their position.
To record the position and movement of food in the experiments, we conducted preliminary setup before the experiments. We placed grid sheets (10 cm increments) on the ground around locations a and b when the elephants were elsewhere. The grid sheets were pre-recorded using a stationary video camera (Canon iVIS HF or Sony HDR-CX170), and the sheets were then removed. During the experiments, we consistently placed the video camera in the same position. By superimposing the pre-recorded image of the grids onto experimental video data (processed with Adobe Photoshop Elements 9 and Adobe Premiere Elements 9; Adobe Systems Inc., San Jose, CA), we were able to continuously record the positions of the food items.
Experimental procedures
In each experimental session, we chose two pieces/clumps of one of the five types of food (not always the same type) and placed it in the two inaccessible locations. Foods were set out one to four times daily. Each day, the first food was set out before the elephants entered the compound at 08:45. The subjects could attempt to acquire the food ad libitum while they were in the compound. If the food was removed, a zookeeper set out new food at 10:30, 12:00, or 13:30 following our instructions. Hay was set out only before 8:45, as it was challenging to place it while the elephants were present. A “session” started when food was set out and ended when the food was taken by a subject or when the elephants returned to their rooms. A “trial” started when a subject began blowing at a food item and ended when the subject acquired the food (defined as “success”) or aborted the attempt by leaving the area for more than 1 min (“not success”). Of these trials, an “initial trial” was defined as a trial that started when the food was in the initial position. The period between the beginning of a session and the time an elephant began a trial varied according to the food type, with apples, potatoes, and bamboos taking relatively longer times (apple: mean ± SE 73.23 ± 13.44 min, potato: 68.56 ± 16.90 min, bamboo: 62.45 ± 19.53 min, fallen leaves: 16.40 ± 3.68 min, hay: 6.43 ± 1.67 min). This difference may reflect the elephants’ preference and motivation for each type of food. If the food moved due to the subject’s blowing but was not taken, we did not restore it to its initial position. We conducted multiple sessions with each food and attempted to perform >10 initial trials with each subject for each food type.
During this study period, we did not change the amount of regular food given each day. Neither we nor zookeepers approached the elephants during trials, but we did not control for behaviour by zoo visitors; however, it is unlikely that their presence affected the elephants’ behaviour. We did not give extra rewards or praise when they acquired food in the trials.
All trials were recorded using two cameras at each location, one focused on the subject and food together, and the other focused on food only. In total, we conducted 101 sessions, during which 128 trials were observed (Mineko: 68, Suzuko: 60; Table 1).
Data coding
Recorded movies were analysed using Adobe Premiere Elements 9. Frame-by-frame playback (1/30 s increments) was used when necessary.
For each trial, we recorded the following:
-
1.
The individual that initiated the trial (Mineko or Suzuko).
-
2.
Whether the individual succeeded.
-
3.
The frequency of blowing within each trial.
-
4.
The duration of each blowing bout, measured by ear in 0.2 s increments based on the start and end of audible blowing, using frame-by-frame playback.
-
5.
The food position on the grid (nearest point, 5 cm increments) after the end of each blowing bout; by comparing food positions (only grid rows were measured) before and after blowing, we calculated the distance of food movement.
-
6.
The direction of food movement immediately after the start of blowing, classified as forward, backward, right, or left.
-
7.
In the experimental sessions using hay, we also recorded the following for each blowing bout:
-
8.
The target of blowing. The position, classified into three types (near, centre, or far side of the hay), was assessed by recording which portion of the hay blew away at the start of each blowing bout.
-
9.
Whether the direction of food movement changed: if the hay moved continuously forward it was classified as “no change”. In contrast, when the direction of hay movement changed from forward to backward, it was classified as “change”.
-
10.
The trunk-tip position at the start of each blowing bout, classified into four types (not reaching for the hay, at the front edge, at the back edge, or over the hay). We drew three vertical lines over the hay in our video recordings to judge trunk position.
-
11.
The trunk shape at the start of each blowing bout. Based on which part of the trunk was bent, this was classified into two types (tip turned down and trunk bent approximately 30 cm from the tip).
With help from a blind coder, we calculated inter-observer reliabilities for (3) blowing frequency and (4) blowing duration. Using Pearson’s correlation coefficient (Martin and Bateson 1986), we found high reliabilities for both data sets (blowing frequency: r = 0.93; blowing duration: r = 0.96).
Data analysis
Unless otherwise noted, we used a (general) linear model (LM) or a generalised linear model (GLM). We used R 2.14.1 (R Development Core Team 2011) for all analyses, at α = 0.05 (two-tailed). Trials on potatoes were excluded from most analyses because Suzuko did not attempt to acquire a potato (Table 1). The trials with fallen leaves were used only for an analysis of success rates because the non-cohesive nature of this food presumably required a qualitatively different gathering technique (i.e. collecting leaves into one place; Movie S1).
Goal-directed behaviour
Relationship between behaviour (blowing vs. grasping) and food distance
For each subject, a GLM with binomial error structure was used to investigate the relationship between food distance and behaviour (blowing or grasping). Blowing data from periods when food was inaccessible were excluded, as grasping would be impossible (even when an individual stretched, keeled her forelegs, and raised one of rear legs; see Movie S1). In location a, the inaccessible area was defined as >175 cm from the compound because Suzuko could grasp food at a maximum distance of 175 cm in all trials. Mineko grasped food at a maximum distance of 160 cm, but appeared capable of reaching at least 175 cm, as her trunk was longer than Suzuko’s. In location b, the inaccessible area was defined as >130 cm for Suzuko and 165 cm for Mineko because they grasped food at these respective maximum distances. We analysed trials with four types of food (Mineko, number of behaviours, i.e. blowing or grasping: N = 114 in 44 trials; apple: N = 50 in 21 trials; bamboo: N = 10 in 5 trials; hay: N = 43 in 13 trials; potato: N = 11 in 5 trials; Suzuko, apple: N = 11 in 3 trials; bamboo: N = 12 in 6 trials; hay: N = 34 in 14 trials). Whether the subject blew or grasped was set as a dependent variable, and the distance between the subject and food as an independent variable.
Relationship between blowing duration and food distance
We further investigated whether the subjects altered their blowing duration according to food distance for four types of food, expecting that they would blow for longer when the food was distant. Blowing data for four types of food were analysed using a LM after excluding trials during rain (Mineko: N = 161, apple: 85, bamboo: 11, hay 41, potato: 24; Suzuko: N = 155, apple: 73, bamboo: 24, hay: 58). Blowing duration was set as the dependent variable and the distance between subject and food as an independent variable. We controlled for any effects of blowing bout order (see “Results”) and subject pose (standing or kneeling; see “Results”) by setting these variables as additional independent variables.
Individual differences in blowing skill
We compared the success rates and blowing skills (see “Data coding”) of the two individuals.
Success rate (Table 1)
The success rates of the two elephants were compared for the four types of food using a GLM with binomial error structure. Trials in which Suzuko’s attempts were disturbed by Mineko were excluded. In total, 109 trials were analysed, made up as follows: apples 40 (Mineko: 27, Suzuko: 13); bamboo 12 (Mineko: 5, Suzuko: 7); fallen leaves 25 (Mineko: 11, Suzuko: 14); hay 32 (Mineko: 13, Suzuko: 19). Whether the subject succeeded was set as the dependent variable, and individual identity was set as an independent variable. Food type was also set as an independent variable to control for differences among foods.
Blowing duration
The blowing durations of the two subjects were compared for three types of food using a two-sample unpaired t test. We compared the durations of the first blow in each initial trial (N = 73, apple: 31, Mineko: 18, Suzuko: 13; bamboo: 12, Mineko: 5, Suzuko: 7; hay: 30, Mineko: 11, Suzuko: 19). Trials performed during rain were excluded because the camera did not clearly record the sound of blowing.
Blowing frequency
The frequencies of blowing per trial for the three types of food were compared between the subjects using a GLM with Poisson error structure based on data from the initial and successful trials (N = 55, apples: 20, Mineko: 17, Suzuko: 3; bamboo: 11, Mineko: 5, Suzuko: 6; hay: 24, Mineko: 11, Suzuko: 13). Blowing frequency was set as the dependent variable and individual identity and food type as independent variables.
Distance of food movement
The distances of food movement between two subjects were compared for the three types of food using a LM on the first blowing bouts in the initial trials (N = 76, apple: 34, Mineko: 20, Suzuko: 14; bamboo: 12, Mineko: 5, Suzuko: 7; hay: 30, Mineko: 11, Suzuko: 19). The distance of food movement was set as a dependent variable and individual identity and food type as independent variables.
Direction of food movement
The direction of food movement between subjects was compared for the three types of food using Fisher’s exact test. Not all foods could move equally well with blowing, depending on their shape and structure (e.g. bamboo). To address this, we analysed only data in which the food could potentially move vertically. Moreover, we included only data for when the food actually did move (N = 140, apple: 62, Mineko: 37, Suzuko: 24; bamboo: 33, Mineko: 10, Suzuko: 23; hay: 46, Mineko: 28, Suzuko: 18). We compared the proportions of food that moved forward versus food that moved in other directions between the two elephants.
Target of blowing
We compared the target positions and whether the hay was continuously driven forward using Fisher’s exact test for data collected from the subjects when the hay was in the initial position (N = 59, Mineko: 13, Suzuko: 46). We compared the proportion of blowing bouts targeting the far side of the hay versus those targeting other positions and the proportion of cases in which the hay was continuously driven forward versus those in which its direction changed from forward to backward.
Position and shape of trunk
We compared the position and shape of the subjects’ trunks while blowing using blowing data on hay in the initial position (N = 56, Mineko: 11; Suzuko: 45). To analyse the position, we used Fisher’s exact test to examine the proportion of cases in which the trunk-tip was held over the hay versus when it was in other positions.
Results
Goal-directed behaviour
On average, subjects blew 3.18 times (SE: 0.34) to drive the food from its initial position to an accessible range.
Subjects were less likely to blow when food was nearby (based on data from only cases where food was within reach; Fig. 2; binomial GLMs, Mineko: b ± SE = −0.013 ± 0.004, z = −3.52, P < 0.001; Suzuko: b ± SE = −0.071 ± 0.022, z = −3.25, P = 0.001). Moreover, Mineko manipulated her blowing duration based on food distance; she blew for a longer duration when the food was distant than when it was near (LM: Mineko: b ± SE = 0.003 ± 0.0004, z = 9.65, P < 0.001). We found no such relationship for Suzuko (b ± SE = 0.0008 ± 0.002, z = 0.46, P = 0.64).

Boxplots showing food distance when each subject grasped or blew after the food reached within an accessible distance. On the horizontal axis, “0” indicates the maximum distance elephants could reach. Positive values on the horizontal axis indicate the distance of the food from the point “0”
Individual differences in blowing skill
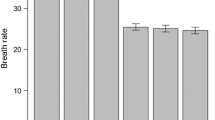
Individual differences in blowing skill between the two subjects were found, with Mineko being more proficient than Suzuko. First, Mineko’s overall success rate (81 %) was higher than Suzuko’s (70 %) (binomial GLM, b ± SE = −2.68 ± 0.76, z = −3.55, P < 0.001; Table 1). Second, the food was moved a significantly longer distance per blow by Mineko (average ± SE: 42.57 ± 7.11 cm) than by Suzuko (15.19 ± 5.81 cm) (LM: b ± SE = −34.42 ± 8.69, t = −3.96, P < 0.001; Fig. 3). These results may be due to the differences in both blowing duration and the target. Mineko’s blowing duration (average ± SE: 1.18 ± 0.02 s) exceeded Suzuko’s (0.69 ± 0.02 s) (t test: t = 16.19, df = 71, P < 0.001), although the frequency of blowing per trial was similar (Mineko: average ± SE: 3.45 ± 0.34, Suzuko: 3.18 ± 0.45; Poisson GLM: b ± SE = 0.043 ± 0.17, z = 0.26, P = 0.80). The direction of food movement also differed between subjects. Mineko always drove food forward (75/75), whereas Suzuko sometimes drove it to the right or left (2/65) or backward (8/65) (Fisher’s exact test: forward versus other directions: P < 0.001). We investigated the blowing target using trials with hay because the large surface area allowed easy target identification. To drive hay towards the elephant, it was necessary to blow on its far side. The frequency of blowing at each target location did not differ between subjects (Mineko: far: 10, centre: 3, near: 0; Suzuko: far: 31, centre: 11, near: 4; Fisher’s exact test comparing far versus other positions: P = 0.74). However, the direction of hay movement occasionally changed during blowing for Suzuko (30/46), whereas it did not for Mineko (no change: Mineko, 13/13; Suzuko, 16/46; Fisher’s exact test: P < 0.001). This suggests that Mineko was able to consistently aim for and hit the far side of the hay, whereas Suzuko was less consistent. These results may be due to differences in trunk-tip position between the subjects during blowing, as Mineko held the tip of her trunk over the hay in all cases (11/11), whereas Suzuko did not (over: 11, back edge: 15, front edge: 13, not reaching for hay: 6). The relative proportions of these trunk positions differed significantly between subjects (Fisher’s exact test: over hay versus other positions: P < 0.001). Trunk shape also differed between subjects (Movie S1). Mineko turned the tip of her trunk down (11/11), whereas Suzuko bent her trunk at ~30 cm from the tip (45/45). Mineko’s proficiency was also clear in other behaviours; for example, she seemed to manipulate her blowing speed to collect fallen leaves efficiently (Movie S1).
Discussion
The blowing behaviour we observed was goal-directed. Both elephants blew the inaccessible food until it reached an accessible range and blew even more to drive food towards them. However, Suzuko sometimes ceased blowing after the food reached an accessible range (Fig. 2), and grasped the food by stretching and sometimes raising one of her rear legs. On the other hand, Mineko blew food until the food came close enough to grasp easily as we expected. It might be that blowing was less demanding for Mineko than kneeling on her forelegs and stretching her body, although we do not know why Mineko was reluctant to stretch her body.

Individual mean distances of food movement per blow for each food. Error bars indicate 1 SE
This study not only replicates Darwin’s observation but also adds a new example of the spontaneous behaviour for achieving a goal in animals. The use of breath for driving food is probably unique to elephants, due to their dexterous trunks. Additionally, they are familiar with manipulating the act of blowing, as they commonly use this technique for self-comfort (Chevalier-Skolnikoff and Liska 1993) and acoustic communication (Olson 2004), which might underpin their skilful use of breath.
Does this blowing behaviour count as tool use? A classic and standard definition of tool use by Beck (1980) is “the external employment of an unattached environmental object to alter more efficiently the form, position…” (see also St Amant and Horton 2008, for an extension of this definition). Breath or air may not fit this definition because it is part of the environment. However, several types of behaviour have been difficult to define or rule out as tool use (e.g. water shooting in archerfish: Bekoff and Dorr 1976; use of a water jet in the stingray: Kuba et al. 2010; producing bubbles to form a barrier for herding fish in humpback whales Megaptera novaeangliae and dolphins: Wiley et al. 2011; Leighton 2004; using water to manipulate objects in bottlenose dolphins Tursiops truncatus: Yamamoto et al. 2014). For example, Kuba et al. (2010) suggested that the use of a water jet by the stingray can be regarded as tool use. Based on studies of water use in archerfish, Brown (2012) also suggested that if aquatic animals have “control over the water and use it effectively to achieve a goal, then it may count as true tool use”. If we follow Brown’s criterion that goal-directedness is sufficient for defining a tool, the blowing behaviour of elephants can be counted as tool use. The definition of a tool has also been controversial among researchers. Although it is tempting to discuss whether air is tool, we think that such a simple dichotomy is less fruitful because the conclusion strongly depends on the definition that researchers employ. Working from the standpoint of comparative psychology, Seed and Byrne (2010) suggested that determining whether a given behaviour constitutes tool use is less important than analysing examples in which animals need to exhibit their cognitive abilities in a flexible way to solve a problem. We agree with this opinion and think that it would be more fruitful to consider the psychological processes underlying the use of air. Seed and Byrne (2010) raised four elements as the cognitive underpinnings of the uses of tools. Of these, our results suggest that elephants seem to understand causality and physical reasoning. Our experiments were not designed to test the other two elements, insight and planning; therefore, the question of whether these were involved in the use of air remains unexplored. In addition, the concept of an extension of the body is also important for understanding the cognitive aspects. For example, Maravita and Iriki (2004) analysed the neural activities and behaviours/postures of macaques trained to use a tool and concluded that the tool can be regarded as an extension of the body. It remains an open question whether animals manipulating water or air use these non-solid media as extensions of the body, as they are detached from their body. As such, reports of new instances of tool or tool-like uses will provide an opportunity to infer psychological processes, which will ultimately lead researchers to critically rethink the definition of tool use in a more sophisticated manner. This study offers such an opportunity.
We found several differences in the techniques used for and the consequences of blowing between the two elephants. Mineko’s success rate was higher than Suzuko’s. Mineko drove food forward in all cases, and the distance over which she drove the food was significantly greater than the distance Suzuko was able to achieve. Mineko held her trunk-tip over the food and kept blowing at the far side of the food. This suggests that she was aware of the physical consequence of blowing on the far side, knowing that it was an efficient way to drive the food towards her. Additionally her blowing duration was longer than Suzuko’s, and Mineko manipulated her blowing duration based on food distance. She may have learned that longer-duration blowing drives food further. Mineko’s sophisticated skills may imply that she learned or understood the physical principles underlying the effects of blowing. Mineko’s skills likely explain her higher success rate and distance per blowing. In contrast to Mineko, Suzuko sometimes drove food backward. One reason for this might be that she bent her trunk ~30 cm from the tip and her trunk-tip was not held over the food in all blowing bouts.
Manipulating air might be difficult because of its nature (i.e. it is invisible and has less resistance than other substances). Our study provided a rare observation of two captive Asian elephants manipulating air as a problem-solving technique, with one of the two employing sophisticated skills. Recently, many reports have suggested that elephants have advanced cognitive abilities, including knowledge about the physical environment (e.g. Wickler and Seibt 1997; Hart et al. 2001; Irie-Sugimoto et al. 2008; Bates et al. 2008a; Smet and Byrne 2014. For a review see Byrne et al. 2009; Irie and Hasegawa 2009), which are comparable to those of apes and corvids (Bates et al. 2008b; Plotnik and Clayton 2015). Our study provides additional, previously unreported data demonstrating physical intelligence in elephants. At the same time, however, this study raised several questions. It is unclear whether the subjects acquired blowing behaviour through trial-and-error, insight problem solving, or social learning. However, the fact that two co-habiting females show the same behaviour raises the possibility of social learning. Other remaining questions are whether this use of breath for problem solving is common in elephants and the degree to which individuals can manipulate blowing duration and speed. To answer these questions, it would be fruitful to conduct additional experiments with this study’s subjects, to look for other individuals who can use air in similar ways, and to conduct new experiments of problem solving that are designed to elicit individuals to the use of air.
References
Bates LA, Poole JH, Byrne RW (2008a) Elephant cognition. Curr Biol 18(13):544–546
Bates LA, Sayialel KN, Njiraini NW, Poole JH, Moss CJ, Byrne RW (2008b) African elephants have expectations about the locations of out-of-sight family members. Biol Lett 4(1):34–36
Beck BB (1980) Animal tool behaviour: the use and manufacture of tools by animals. Garland STPM Publishing, New York, p 10
Bekoff M, Dorr R (1976) Predation by ‘shooting’ in archer fish, Toxotes jaculatrix: accuracy and sequences. Bull Psychon Soc 7:167–168
Bentley-Condit VK, Smith EO (2010) Animal tool use: current definitions and an updated comprehensive catalog. Behaviour 147(2):185–221
Brown C (2012) Tool use in fishes. Fish Fish 13:105–115
Byrne RW, Bates LA, Moss CJ (2009) Elephant cognition in primate perspective. Comp Cogn Behav Rev 4:65–79
Chevalier-Skolnikoff S, Liska J (1993) Tool use by wild and captive elephants. Anim Behav 46:209–219
Darwin C (1874) The descent of man, and selection in relation to sex, 2nd edn. John Murray, London, p 76
Giudice AM, Pavé R (2007) Cebus paraguayanus in zoos: the spontaneous expression of species-specific behaviors. Neotrop Primates 14:65–71
Hart BL, Hart LA, McCoy M, Sarath CR (2001) Cognitive behaviour in Asian elephants: use and modification of branches for fly switching. Anim Behav 62(5):839–847
Irie N, Hasegawa T (2009) Elephant psychology: what we know and what we would like to know. Jpn Psychol Res 51(3):177–181
Irie-Sugimoto N, Kobayashi T, Sato T, Hasegawa T (2008) Evidence of means–end behavior in Asian elephants (Elephas maximus). Anim Cogn 11(2):359–365
Jesse E (1834) Gleanings in natural history, vol i. John Murray, London, p 19
Kuba MJ, Byrne RA, Burghardt GM (2010) A new method for studying problem solving and tool use in stingrays (Potamotrygon castexi). Anim Cogn 13(3):507–513
Leighton TG (2004) From seas to surgeries, from babbling brooks to baby scans: the acoustics of gas bubbles in liquids. Int J Mod Phys B 18(25):3267–3314
Lethmate J (1982) Tool-using skills of orang-utans. J Hum Evol 11(1):49–64
Maravita A, Iriki A (2004) Tools for the body (schema). Trends Cogn Sci 8(2):79–86
Martin P, Bateson P (1986) Measuring behaviour. Cambridge University Press, New York
Mendes N, Hanus D, Call J (2007) Raising the level: orangutans use water as a tool. Biol Lett 3:453–455
Nissani M (2004) Theory of mind and insight in chimpanzees, elephants, and other animals. In: Rogers LJ, Kaplan G (eds) Comparative vertebrate cognition: are primates superior to non-primates?. Kluwer/Plenum, New York, pp 227–261
Okanoya K, Tokimoto N, Kumazawa N, Hihara S, Iriki A (2008) Tool-use training in a species of rodent: the emergence of an optimal motor strategy and functional understanding. PLoS ONE 3(3):e1860
Olson D (ed) (2004) Ethogram of elephant behaviors. In Elephant husbandry resource guide. Allen Press, Lawrence, pp 103–121
Plotnik JM, Clayton NS (2015) Convergent cognitive evolution across animal taxa: comparisons of chimpanzees, corvids, and elephants. In: Margolis E, Laurence S (eds) The conceptual mind: new directions in the study of concepts. MIT Press, Cambridge, pp 29–55
Pollack D (1998) Spontaneous tool use in a vervet monkey (Cercopithecus aethiops sabaeus). Am J Primatol 45(2):201
Romanes GJ (1883) Animal intelligence. Kegan Paul Trench, London, p 398
Seed A, Byrne R (2010) Animal tool-use. Curr Biol 20(23):1032–1039
Shumaker RW, Walkup KR, Beck BB (2011) Animal tool behavior: the use and manufacture of tools by animals. JHU Press, Baltimore
Smet AF, Byrne RW (2014) Interpretation of human pointing by African elephants: generalisation and rationality. Anim Cogn 17(6):1365–1374
St Amant R, Horton TE (2008) Revisiting the definition of animal tool use. Anim Behav 75(4):1199–1208
Taylor AH, Elliffe D, Hunt GR, Gray RD (2010) Complex cognition and behavioral innovation in New Caledonian crows. Proc R Soc Lond B 277:2637–2643
Wickler W, Seibt U (1997) Aimed object-throwing by a Wild African elephant in an interspecific encounter. Ethology 103(5):365–368
Wiley D, Ware C, Bocconcelli A, Cholewiak D, Friedlaender A, Thompson M, Weinrich M (2011) Underwater components of humpback whale bubble-net feeding behaviour. Behaviour 148(5):575–602
Yamamoto C, Furuta K, Taki M, Morisaka T (2014) Captive bottlenose dolphins (Tursiops truncatus) spontaneously using water flow to manipulate objects. PLoS ONE 9(9):e107796
Acknowledgments
We are deeply grateful to the staff of Kamine Zoo—particularly the zoo director Mr. Nobutaka Namae, and the zoo keepers Mr. Isamu Ouchi, Mr. Satoshi Kimura, Mr. Kazuyuki Takahara, and Mr. Tabito Nakamoto—for their assistance with the experiment. We thank Dr. Motoomi Yamaguchi (SOKENDAI) for his help in calculating reliability. We also thank the following people for their advice on improving the manuscript: Dr. Hisashi Ohtsuki, Dr. Ai Kawamori, Mr. Masahito Morita, and Dr. Finlay Stewart (SOKENDAI); and Dr. Michio Nakamura (Wildlife Research Center of Kyoto University).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Ethical standard
This experiment was approved by the Research Ethics Committee of The Graduate University for Advanced Studies (2014A002) and by Kamine Zoo.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Supplementary material 1 (MOV 47386 kb)
Rights and permissions
About this article

Cite this article
Mizuno, K., Irie, N., Hiraiwa-Hasegawa, M. et al. Asian elephants acquire inaccessible food by blowing. Anim Cogn 19, 215–222 (2016). https://doi.org/10.1007/s10071-015-0929-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10071-015-0929-2