
Abstract
A relatively small laboratory model of soil slope was constructed, and a special strain-sensing cable was embedded in the slope soil mass. The strain at different positions of the model slope was measured using pulse-prepump Brillouin optical time-domain analysis (PPP-BOTDA) technology during slope surface loading and slope cutting. The data measurements under loading were analyzed, and the co-deformation between the sensing cable and the artificial compacted soil mass is discussed. The results show that the specially designed strain sensing cable is co-deformed well with the soil after a loading of 225 kPa. The measurement data of the cut slope were analyzed in detail to elaborate the relationship between soil strain-field and slope stability. When the slope failed, the position of the sliding surface was coordinated with the strain anomaly area of the soil strain-field. A limit equilibrium analysis was then conducted to determine safety factors during slope cutting. This analysis allowed determination of the characteristic strains, reflecting the stability of the slope, which permitted the establishment of an empirical relationship between horizontal characteristic maximum strains and safety factors. The results were most effective in validating the use of the distributed optical fiber sensing technology for soil strain-field monitoring, for the purposes of evaluating slope stability and creating a warning system for landslides.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Landslides are pervasive geotechnical problems that pose a great threat to both human life and property worldwide. Although there are a number of factors that cause slope failure, surcharge loading, adjacent construction activities, groundwater seepage, rainfall infiltration, earthquake, and cut slope are perhaps the most common. Among these, cut slope is one of the most difficult to predict. Many cut-slopes are constructed of stiff and over-consolidated clays. They are prone to softening with time, which results in shallow slope failures at depths of 1–1.5 m (Norris 2007). Several studies have indicated the prevalence of such failures, particularly the work of El-Ramly et al. (2005), who presented a back analysis to investigate the main causes of a cut-slope failure, and the rigorous extension of Culmann’s vertical-cut analysis to unsaturated soils conducted by Morse et al. (2014). However, the complexity of the characteristics of geotechnical materials in the field has thus far prevented any analysis of the soil strain-field effect on slope stability. Geotechnical instrumentation is most important in determining field parameters and identifying potential landslide risks. In the past few decades, a number of geotechnical instruments have been developed to monitor the condition of slope stability (Dunnicliff 1993). For instance, the inclinometer, an instrument commonly used for monitoring any slope movement, can capture the potential slip surface and the tendency for slope deformation. Unfortunately, the collected data from discrete locations can hardly reflect the overall stability condition of a slope with a very complicated set of geological and geo-hydrological conditions. The durability and reliability of traditional electrical-based instruments for long-term monitoring also makes their use somewhat uncertain. Consequently, optical fiber sensing technologies have been developed and applied successfully for the health monitoring of a variety of geotechnical related infrastructures (Zhu 2009). Unlike conventional transducers, these sensors are impervious to electromagnetic interference, they are quite small, they are highly sensitive, and possess excellent long-term durability. Most importantly, combining the wavelength division multiplexing (WDM) and time division multiplexing (TDM) techniques makes it possible to integrate these optical fiber sensors into a distributed optical fiber sensing network. This integration means that a one-dimensional (1D) optical fiber, which combines the function of sensing and data transmission, can be installed on a geo-structure for the acquisition of large sets of strain, temperature, displacement and loading data. Compared with traditional methods, a single optical fiber with an outer diameter of 125 μm is used to form a fully distributed strain-sensing network composed of thousands of sensors, making the installation of sensors and cables most convenient. In using an optical time-domain reflectometry (OTDR) technology for the displacement monitoring of landslide, Higuchi et al. (2007) demonstrated a relatively low measuring accuracy, and the inexpensive fibers and instruments made their device very economical. Similarly, the use of Brillion optical time domain analysis (BOTDA) technology by Iten et al. (2008) for landslide boundary localization showed a marked increase in the resolution of distributed strain monitoring. However, the relationship between monitoring data and the evolutionary process of the landslide remains to be investigated. Wang et al. (2009) found that distributed optical fiber sensing technology is particularly configurable for laboratory-scale tests, mostly due to the tiny size of the sensing cable. Using a Brillion optical time domain reflectometry (BOTDR) sensing cable to measure the strain of geotextiles and geo-grid in a model slope, they found that deformation of the geotextile was more coordinated with soil mass than with geo-grids. Zhu et al. (2015) used fiber Bragg grating (FBG) technology to measure the soil nails strains of the reinforced slope, and found that the measured strains of the model soil nails had a close relationship with the stability of the model slope.
Previous studies have shown that the strain-field in the slope mass is related closely to slope stability (Zhu et al. 2014, 2016). Consequently, to capture the horizontal and vertical soil strains of the slope to evaluate slope stability, the authors used a relatively small laboratory model to investigate the capability of a distributed pulse-prepump (PPP)-BOTDA strain-sensing technology to monitor slope stability problems. A specially designed strain-sensing cable was buried in the soil mass to measure the strain distribution inside the model slope during surface loading and slope cutting. The analysis results verify the effectiveness of the distributed optical fiber sensing technologies in slope stability monitoring.
Materials and methods
Measuring principle
The conventional technologies used in slope stability monitoring are based on point-measurement, such as the displacement meters and inclinometer, while the optical fiber sensing technologies enable the fully-distributed measurement. The concept of distributed optical fiber sensing was developed in 1970s to estimate the length and locate the faults of an optical fiber. When a series of optical pulses are injected into a fiber, the strength of the return pulse is recorded as a function of time. The attenuation data along the fiber can be measured with a certain spatial resolution, thus permitting exact location of a weakness or break-point.
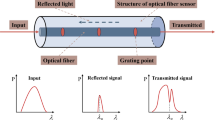
As a fully distributed monitoring technology, BOTDA was developed in the 1980s (Horiguchi and Tateda 1989), to automatically measure the strain or temperature of all the locations along a sensing fiber with a certain spatial resolution. As illustrated in Fig. 1, the pulse-prepump Brillouin optical time-domain analysis technique, developed Kishida and Li (2006) entails using a pre-pump pulse in front of a traditional laser pulse to enhance the accuracy and spatial resolution. The weakness of the spontaneous Brillouin backscattered light prevents the demodulator from capturing the exact Brillouin frequency shift from one end of the sensing fiber. To improve the signal to noise ratio, PPP-BOTDA exploits the stimulated Brillouin scattering (SBS) with a stepwise pump pulse combined with a pre-pulse used to pre-pump the acoustic waves. From two ends of the optical fiber, the pulse laser (pump laser) and probe continuous wave are injected into the optical fiber.

Sketch of the principle of pulse-prepump Brillion optical time domain analysis (PPP-BOTDA) (Zhang and Wu 2012)
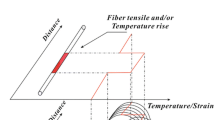
According to the linear relationship between the Brillouin frequency shift and the strain or temperature, the strain or temperature can be measured by detecting the frequency change of stimulated Brillouin scattering (SBS); the equation is given as
where C ε and C T are the strain and temperature coefficients, ν B is Brillouin frequency shift, and ε and T are the strain variation and temperature variation, respectively. Thus, it is possible to use time-domain analysis by measuring the propagation times for light pulses traveling in the optical fiber, to obtain the continuous temperature and strain distributions along that fiber.
The sensitivity of the PPP-BOTDA monitoring data to both strain and temperature makes a discrimination of strain and temperature necessary. The very small fluctuation of the indoor temperature in the laboratory, less than ±5 °C, showed the negligible influence of temperature on the strain measurement precision. The author measured the laboratory room temperature and the model soil temperature during the test. The measurement data showed that the variation in room temperature was less than ±5 °C and the internal temperature of the model soil was almost constant. Therefore, the strain caused by temperature can be taken to be negligible in this test, and the direct measurement data of the strain-sensing cable is the real strain related to soil deformation.
Slope model test
Test chamber and model materials
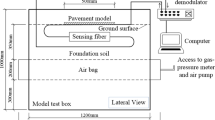
In order to capture the soil strain-field of a soil model slope under the effect of cutting slope, and to verify the effectiveness of the optical fiber sensing technology in slope stability monitoring, a relatively small model test of a soil slope was conducted in a slope test chamber. As shown in Fig. 2, the slope test was performed in the Key Laboratory of Distributed Sensing and Monitoring Technology in the Infrastructure Engineering department of Suzhou, China. The chamber is 1.5 m in width, 3.0 m in length and 1.5 m in height, whose dimensions were chosen in order to consider both the scale effect and the difficulty in soil mass preparation. The front chamber wall is made of 0.02 m glass supported with 0.01 m steel bars for easy observation as well as robustness.

Slope test chamber
The soil used in the model test consisted of 10 % kaolin and 90 % river sand by dry weight. A series of laboratory tests were conducted to determine soil properties and parameters. As shown in Fig. 3, the grain size distribution curve is a continuous and smooth curve with C u and C c of 9.333 and 0.922, respectively. The soil is classified as well-graded sandy soil (SW), according to the Unified Soil Classification System. The soil has a specific gravity of 2.63, and a unit weight of 20 kN/m3. The results of Proctor compaction tests show that the optimum moisture content and maximum dry unit weight are 11.2 % and 18 kN/m3, respectively. Direct shear tests were also conducted, and the average cohesion and friction angle of the soil under natural conditions are 12.3 kPa and 25.4°, respectively.

Particle size distribution of the test soil
Sensing cable and instrumentation
The inherent fragility of the bare optical fiber requires designing an appropriate sensing cable that is both strong and flexible. After a series of laboratory evaluation and calibration tests, a special tight-buffered single-mode sensing cable—a 2 mm polyurethane (PU) sensing cable—fabricated by Suzhou Nanzee Sensing Co. (Suzhou, China) was selected as the test strain sensing cable; the structure of the cable is shown in Fig. 4. Neither fatigue nor creep effect was observed on this 2 mm PU sensing cable. In order to ensure the deformation compatibility between the sensing cable and the soil mass, a 4-mm outer-diameter heat shrinkage tube was used to improve the surface roughness of the sensing cable as shown in Fig. 4. The NBX-6050A PPP-BOTDA sensing interrogator, developed by Neubrex (Osaka, Japan), was used to scan the distributed sensing cable net, the parameters of which, along with the layout of the strain sensing cable are shown in Table 1.

Details of the test sensing cable
Model construction
As shown in Fig. 5a, the slope model chamber is 1.5 m high, which includes a slope height of 1.0 m, a base height of 0.5 m, and slope incline of 45°. During model construction, the test soil with an initial water content of ω = 10 % was positioned in series of horizontal layers with a thickness of 10 cm each. Each layer was tamped equally with a tamping rod to obtain the prescribed height. The procedure was repeated until the desired height of the slope model was obtained. To reduce the friction between the chamber walls and the soil, a thin layer of a polythene sheet with petroleum grease was placed within the chamber. After finishing the slope model filling, the model was kept static for 48 h before the loading procedure to ensure a consistency of the entire soil mass. Soil mechanical tests determined the initial dry density ρ d and void ratio e of the artificial compacted test soil to be 1.54 × 103 kg/m3 and 0.58, respectively. Using this arrangement, the slope was deemed homogeneous, with an assumption of the existence of both an isotropic slope and the plane-strain condition.

The layout of the sensing cable net in the slope model. a Three dimensional (3D) diagram of the slope model and the sensing cable layout. b Vertical profile of sensing cable (z–y cross-section). c Horizontal profile of sensing cable (x–y cross-section)
The distributed strain-sensing cable was embedded in the model slope in the horizontal and vertical directions, the location and layout of which are shown in Fig. 5b, c. The model slope has three horizontal layers of strain-sensing cable, marked as H1, H2 and H3 from top to bottom, and four vertical lines of strain-sensing cable marked as V1, V2, V3 and V4 from left to right. During construction, the strain-sensing cable was embedded into the soil of the model in an S shape to ensure that the horizontal and vertical strain monitoring segments functioned as a whole line. In order to facilitate identification of the boundary of each segment, several characteristic points were prepared along the strain-sensing cable. For every point, a 1 m-long strain sensing cable segment was looped and packaged in a plastic box, and defined as free sensing cable as shown in Fig. 5.
Test procedure
A surface loading test was first undertaken to investigate the co-deformation between the strain-sensing cable and the soil mass. A hydraulic jack, which rested on a thick iron plate, 0.4 m wide and 1.5 m long, was used to apply loading to the slope crest. An H-type steel beam that was connected to the test chamber by threaded blots was used as the reaction frame. Next, pressures of 75, 150, 225, 300, 375 and 450 kPa provided by the hydraulic jack were loaded incrementally. After the last pressure load of 450 kPa, the dry density ρ d and void ratio e of the soil was 1.72 × 103 kg/m3 and 0.44, respectively. The slope was then cut at the toe, with each step vertically cut to a height of 10 cm, with slope failure occurring after cutting slope at a height of 40 cm. A NBX-6050A PPP-BOTDA sensing interrogator was used to measure the strain distributions within the soil mass, with the spatial resolution of the interrogator was set at 5 cm in order to acquire the most reliable strain data.
Test results and analysis
Strain monitoring results
The micro-strains of Layer H1, H2 and H3 strain sensing cable under different loads were then obtained (Fig. 6). Note the clearly visible strains of three layers that present tensile strain under different loadings, with those strains increasing incrementally with a significantly coordinated increase in the loading. The area between segments A, B, C and D are the horizontal free sensing cables (see Fig. 5b). The nonhomogeneous nature of the tamp of the soil mass during the slope model construction confirmed that the soil density at segment A is much greater than that of segments B and C, which leads to a better co-deformation of the sensing cable with the soil mass of segment A at Layer H1. Therefore, the strains of segment A at Layer H1 (see Fig. 6a) are much higher than that of the B and C segment. The strains of segments A, B, C and D at Layer H2 are very close, as shown in Fig. 6b, while the strains of segments B and C at Layer H3 are much larger than that of segments A and D (Fig. 6c). The boundary conditions of the test chamber are the cause of this discrepancy.

Strain distribution along the different layers of the sensing cable under the loading. a Cable strain of layer H1. b Cable strain of layer H2. c Cable strain of layer H3. d Peak strain of the segment C sensing cable.
The change law of the peak strains of segment C, at three horizontal layers under different loading levels, showed that the peak strains increased linearly after the slope surface loading reaches 225 kPa, as shown in Fig. 6d. Also note the change law of the peak strains of segments A, B and D under different layers and loads with a similar discipline as that of segment C. The strain-sensing cable is deemed co-deformed with the soil mass if the measured strains increase linearly with a linearly increased loading in the test, and the dry density ρ d and void ratio e of the soil was 1.6 × 103 kg/m3 and 0.54 when the loading reached in 225 kPa. Consequently, specially designed strain-sensing cable was co-deformed with the soil mass after the slope model surface loading. The slope was then cut so the measured strain could more accurately reflect the deformation of soil mass.
According to the results of the surface loading test, the compactness of the soil has a significant effect on the co-deformation of the strain-sensing cable and soil mass, because that compactness increases with the increase of loading.
The stresses around the sliding surface during the slope cutting are shown in Fig. 7. The resistance force R decreases because of the slope cutting, and the soil mass in the upper slope surface begins sliding under the soil self-weight, known as stress G. The tensioned cracks parallel to the slope face at definite depths were also considered for analyzing the critical height of the rupture surface. A test photograph of the slope cutting is shown in Fig. 8, with cracks present in the upper slope face when the slope was cut 30 cm (Fig. 8a), which indicates a local failure of the slope soil mass. When the cutting height reaches 40 cm, the sliding surface can be clearly observed though the toughened glass wall of the slope test chamber as shown in Fig. 8b. The results are validated by the measured data of the strain sensing cable.

Mechanical analysis of the cutting slope

Photograph of the slope sliding
Figure 9 shows the strain cloud charts of the horizontal sensing cable during slope cutting, which indicate clearly a significant effect of the cut slope on the soil strain-field nearest the slope surface. When the slope was cut, the soil strains at Layer H1 and H2 near the slope surface increased. When the cutting height reached 30 cm, the strains distributed at Layer H2 near the slope surface reached more than 5000 micro-strains, with cracks found near the Layer H2 slope face (see Fig. 8a) and soil mass in the unstable area. The soil strains of this area increased with the increased height of the slope cutting, which culminated in failure of the slope after a height of 40 cm. Because of the slope fail, the Layer H1 sensing cable in the sliding mass showed obvious tensile strain, and the maximum strain reached 8000 micro-strains as shown in Fig. 9a. The cutting of the soil mass returned the strain-sensing cable near the slope surface from a tensile to a free state, which decreased the soil strain to a negative value as shown in Fig. 9c. In fact, the strain cloud chart is more useful to express the abnormal strain distribution if the sensing cable is used in work field slope monitoring rather than in the mid-sized-scale test described in this paper.


Horizontal strain of the sensing cable during slope cutting. a Strain distribution of Layer H1. b Strain distribution of Layer H2. c Strain distribution of Layer H3
The soil strains of segment C at three horizontal layers and the strains of the vertical sensing cable under the slope cutting are shown in Fig. 10, clearly indicating the change in soil strain-field and slope stability. The red area in Fig. 10a represents that the soil strain-field is in a tensile strain state, which increases significantly with the cutting of the slope. However, different strain states of the vertical strain sensing cable are also evident in the different locations during the slope cutting, as shown in Fig. 10b. No strain change in the V1 and V2 locations at the back edge of slope were observed, while such tensile strain did exist in V3 and V4, as shown in the red area A′.

Strain distribution along the various parts of the sensing cable under the cut slope. a Strain field of the horizontal segment C sensing cable. b Strain field of the vertical sensing cable
A comparison of Fig. 10a and b shows that, while the strain state of the horizontal sensing cable changed at the beginning of the slope cutting, the strain state of the vertical sensing cable changed after the slope was cut at 30 cm. These results clearly indicate a greater sensitivity of the horizontal strain-sensing cable than the vertical strain-sensing cable. The growth of the cracks on the slope surface after cutting the slope at 30 cm show that the vertical strain sensing cable and the slope slides were affected by the sliding force. The red area A and A′ in Fig. 10a, b have the same location and size, and the measured boundary of the area in Fig. 10a, b was consistent with the observed sliding surface in Fig. 8b. These results show that the location of the slope sliding surface can be correctly monitored through the use of the distributed strain-sensing cable.
Stability analysis
The SLOPE/W program of the finite element software Geostudio-2007 was selected to quantitatively evaluate the slope stability condition of the model test during slope cutting. Bishop’s simplified method was used to locate the critical slip surface and calculate the minimum factor of safety F s. The soil parameters used in the limit equilibrium analysis are depicted in “Test chamber and model materials”. A graduated increase in excavation height from 0 to 40 cm, caused a decrease in F s from 1.214 to 0.869 as shown in Table 2.
The strains measured by the sensing cable are local axial strains, which reflect the stability condition of the measured soil mass. In order to explore the relationship between soil strain-field and the overall slope stability condition, a characteristic strain ε (h,v) is introduced:
where ε v is the vertical soil strain and ε hmax is the maximum horizontal strains from soil layers. According to the test data, the slope would fail if the vertical strain of the slope model soil mass shown tensile strain (ε v > 0) during the cutting. In this case, we define the characteristic strain ε (h,v) = +∞; when ε v ≤ 0, we define the characteristic strain as the variation of the maximum horizontal strains. The relationship between the horizontal characteristic maximum strain ε hmax, the factor of safety F s, and the applied the cutting height d is shown in Fig. 11. As the slope stability condition depends on slope cutting, the variation of horizontal characteristic maximum strain induced by cutting slope can be used to evaluate the stability of this model slope. A power function exhibited the closest fit to the relationship between the horizontal characteristic maximum strain and the factor of safety, i.e.,

Relationship curve of the excavation-factor of the safety-horizontal characteristic strain
where F s is the safety factor calculated by the Bishop’s simplified method, and a and b are two dimensionless parameters. According to the test results, a = 1.85, b = −0.076. The correlation coefficient R 2 was found to be 0.943, which means the empirical relationship is reliable.
The dimensionless parameters a and b of Eq. (3) depend on the characteristics (e.g., sandy, clay, etc.) of the slope soil. They should be demarcated in different soil characteristics of different slopes when analyzing slope stability.
Summary and conclusions
In this study, loading and cut slope tests of a model slope were conducted, and a distributed PPP-BOTDA sensing technology was employed to measure soil strain-field within the slope model. The data measured under loading was analyzed to discuss co-deformation between the strain-sensing cable and the soil mass. The measurement data of slope cutting was also analyzed in detail to elaborate the relationship between soil strain-field and slope stability. From these results, five conclusions could be drawn:.
-
1.
The viability of using specially designed PPP-BOTDA strain-sensing cable to measure soil strain-fields of model slopes under external force is demonstrated. A clear expression of strain distribution was found by the distributed PPP-BOTDA sensing technology. However, all of the strains obtained with the PPP-BOTDA were 1D strains along the sensing cable rather than a 3D strain as in the model soil. Besides, the PPP-BOTDA technique is a double-end monitoring, which requires the sensing cable to remain intact during the test.
-
2.
The soil compactness was found to have a significant effect on the co-deformation between the sensing cable and soil mass, showing that the bigger the soil compactness, the better the sensing cable co-deformed with the soil mass. According to the test data, dry densities of the model soil greater than 1.6 × 103 kg/m3 and void ratios less than 0.54 are suitable for using PPP-BOTDA sensing technology.
-
3.
Slope cutting had a marked effect on the soil strain-field of the model slope. Analysis of both horizontal and vertical strain data during slope cutting could yield an accurate predictor of slope failure or landslides.
-
4.
The location of the slope sliding surface can be monitored correctly based on optical fiber measurement data of the soil strain-field.
-
5.
An empirical relationship exists between the horizontal characteristic maximum strain and the factor of safety for the cut slope model, indicating the viability of using optical fiber sensing results to estimate the stability condition of the slope. This relationship is affected by the characteristics of the slope soil. To analyze the slope stability more comprehensively, different soil slope model tests should be carried out for further study.
References
Dunnicliff J (1993) Geotechnical instrumentation for monitoring field performance. Wiley, New York
El-Ramly H, Morgenstern NR, Cruden DM (2005) Probabilistic assessment of stability of a cut slope in residual soil. Geotechnique 55(1):77–84
Higuchi K, Fujisawa K, Asai K, Pasuto A, Marcato G (2007) New landslide monitoring technique using optical fiber sensor in Japan. In: Proceedings of 2nd International Workshop on Optoelectronic Sensor-Based Monitoring in Geo-engineering, Nanjing, China, pp 73–76
Horiguchi T, Tateda M (1989) BOTDA non-destructive measurement of single-mode optical fiber attenuation characteristics using brillouin interaction: theory. J Lightwave Technol 7(8):1170–1176
Iten M, Puzrin AM, Schmid A (2008) Landslide monitoring using a road-embedded optical fiber sensor. Proc SPIE 6933:693315–693319
Kishida K, Li CH (2006) Pulse pre-pump-BOTDA technology for new generation of distributed strain measuring system. Struct Health Monit Intell Infrastruct 5:471–477
Morse MS, Lu N, Wayllace A, Godt JW, Take WA (2014) Experimental test of theory for the stability of partially saturated vertical cut slopes. J Geotech Geoenviron Eng 140(9):195–205
Norris JE (2007) Root reinforcement by hawthorn and oak roots on a highway cut-slope in Southern England. In: Eco-and ground bio-engineering: the use of vegetation to improve slope stability, Springer, Dordrecht, pp 61–71
Wang BJ, Li K, Shi B, Wei GQ (2009) Test on application of distributed fiber optic sensing technique into soil slope monitoring. Landslides 6(1):61–68
Zhang H, Wu Z (2012) Performance evaluation of PPP-BOTDA-based distributed optical fiber sensors. Int J Distrib Sens Netw 11:1497–1500
Zhu HH (2009) Fiber optic monitoring and performance evaluation of geotechnical structures. Doctoral dissertation, The Hong Kong Polytechnic University, pp 12–21
Zhu HH, Shi B, Zhang J, Yan JF, Zhang CC (2014) Distributed fiber optic monitoring and stability analysis of a model slope under surcharge loading. J Mt Sci 11(4):979–989
Zhu HH, Shi B, Yan JF, Zhang J, Wang J (2015) Investigation of the evolutionary process of a reinforced model slope using a fiber-optic monitoring network. Eng Geol 186:34–43
Zhu HH, Wang ZY, Shi B, Wong JKW (2016) Feasibility study of strain based stability evaluation of locally loaded slopes: insights from physical and numerical modeling. Eng Geol 208:39–50
Acknowledgments
The authors gratefully acknowledge the financial support of the State Key Program of National Natural Science of China (Grant Nos. 41230636 and 41302217) and the National Key Technology R&D Program of China (Grant No. 2012BAK10B05).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Song, Z., Shi, B., Juang, H. et al. Soil strain-field and stability analysis of cut slope based on optical fiber measurement. Bull Eng Geol Environ 76, 937–946 (2017). https://doi.org/10.1007/s10064-016-0904-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10064-016-0904-4