
Abstract
Studies have demonstrated that a multi-modal virtual reality (VR) system can enhance the realism of virtual walking. However, a few studies explore the body awareness altered by visual presentation of virtual body and optic flow during locomotion in VR. This study investigated the impact of invisible body and optic flow on experience of users voluntarily walking in a camera-image VR environment. Participants wearing a head-mounted display performed six-step walking at their own timing. Three experimental conditions providing visible body and optic flow as a baseline, invisible body and optic flow, and invisible body and no flow, were conducted on three different days. We found that losing visual body per se decreased the feeling of being-there-now. However, providing continuous optic flow maintained virtual presence equivalent to the baseline in terms of immersion and natural walking, as opposed to providing discontinuous flow. We discussed these results in association with body awareness.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Applications for virtual reality (VR) help users to immerse themselves in a realistic or imaginative virtual world. Users can interact with a variety of scenes, such as walking, boxing with virtual opponents, and dancing with partners in the virtual world [1]. In the past, a hardware setup that included a stereoscopic display, computers, headphones, speakers, and 3D input devices was referred to as virtual reality [2]. More recently, regardless of the hardware they employ, the word has been used widely to describe any software that contains a 3D component. Given this wide range, it is important to define and define what is meant by virtual reality. A binary definition would make it impossible to compare different VR systems, and hence, the definition of VR should not be that simple. Based on this concept, studies consider a VR system in the context of the VR experience it offers. The replacement of one or more physical senses with virtual senses is the most fundamental definition of a VR experience [3, 4]. When it comes to exploring settings that are difficult for humans to reach or that are highly specialized for a specific purpose, virtual reality technology is a wonderful tool.
Users can enjoy realistic, high-fidelity VR with the help of a variety of devices. A display system, such as a head-mounted display (HMD), that presents images in a way that the user perceives them to be 3D (as opposed to seeing a 2D projection of a 3D scene on a common TV or computer screen) in combination with a head tracking system might be the minimum set of requirements for a highly immersive VR experience, given the relative importance the sense of sight has in our interaction with the world [5, 6]. Therefore, simulating natural walk is predicted to greatly improve navigation in the virtual world, because it mimics how people often explore the real world [7,8,9]. Redirected walking techniques and/or applying a gain to the virtual movement distort the virtual environment to represent a greater space than the actual environment within a border that can be recognized by an external tracker [7, 10]. By stimulating vestibular sensors while maintaining immobility, a treadmill methodology offers navigation options. The body is locked in place with respect to the hardware in the treadmill method as foot movement is monitored along the floor or tread on the unpowered treadmill [11, 12]. However, when trying to simulate natural walking in a virtual world, there have been three basic issues. The first is to develop a responsive gadget that gives the feeling of natural walking. The second is to provide consumers the option to move across virtual areas that are far bigger than the actual ones they are in. The final problem is to create an environment where people can adapt relatively quickly [13].
Especially with respect to the first issue above [13], researches have demonstrated that a multi-modal VR system providing auditory and haptic feedback in addition to optic flow can enhance the realism of virtual walking [14,15,16,17]. Although they investigated effects of several external cues on user experience, there are few studies involving existence of user’s virtual body during locomotion [18], even though there are many studies interested in its visualization from a technical aspect [19]. Neuropsychological studies have suggested that users can feel the virtual body moving synchronously with them as their body [20, 21], so-called the sense of body-ownership, and feel authorship over one’s own actions and controlling their execution [22], so-called the sense of agency.
Having these senses of body awareness contributes to improve the reality of VR experience [23, 24]. In line with this, a study has suggested that even absence of virtual body can elicit virtual walking experience if appropriate sensory feedback is provided to induce the body awareness [18]. It is not clear, though, how the different levels of body awareness influence the user experience in VR. Delving into a relationship between body awareness and the experience is important not only to design an effective VR but also to explore the nature of reality felt in VR environments.
This study addressed how the body awareness tuned by visual presentation on VR affects a virtual presence in VR environments. There were three experimental conditions. In the continuous condition, we assumed that optic flow that was continuously matched to one’s own locomotion would induce sufficient body awareness in VR environments even if a virtual body was visually lost [18]. By contrast, in the discontinuous condition, discontinuous optic flow would induce insufficient body awareness because of the lack of visual feedback to sustain sense of agency. These two conditions were compared with a baseline condition where visually close-to-reality presentation was provided. The virtual presence was assessed in terms of the feeling of being-there-now, immersion, and natural walking. We hypothesized that, in comparison with the baseline, the virtual presence was equivalent in continuous condition and declined in discontinuous condition.
2 Materials and methods
2.1 Participants
The participants in this experiment were 12 healthy adults (10 males and 2 females, age 22 ± 6 years), and they had no prior knowledge of the experiment. The experiment was conducted for a total of 3 days under different experimental conditions. The experiment days for each participant were about 1 week apart. On the first day of the experiment, the participants received an overall explanation of the experiment and agreed to participate in the experiment. The experiment was conducted with permission from the Ethics Committee of Nagaoka University of Technology.
2.2 Pre-experiment procedure
Before the start of the experiment on each experimental day, participants received an explanation of the experimental procedure in a waiting room (the room shown in gray in Fig. 1). They were then taken outside the room and put on an HMD (Oculus Rift cv1, Oculus VR, LLC, U.S; a resolution of 1080 × 1200 pixels per eye, a horizontal field of view of 110°, and a refresh rate of 90 Hz) at the experiment starting position (black circle in Fig. 1). At this time, the HMD was not connected to the control PC and no images were projected. Participants were instructed to close their eyes and guided by the experimenter along a complex trajectory from the starting position to the room where the experiment would be conducted (solid curves with arrows in Fig. 1). This process was to prevent participants from identifying which room all three experiments took place in. In fact, although the experimental room used on the first day was different from the room on the second and the third day (Room A and Room B, respectively, in Fig. 1), the participants did not realize that when asked at the end of the third day. After entering the experimental room, participants were guided to the starting position of experimental walking. Then, the HMD was connected to the PC and images were projected according to the experimental conditions for each day (see the next section), and participants were instructed to open their eyes, look around, and adjust the HMD to make the images clear to see.

Schematic diagram of the experimental venue. At first, participants received explanation in the waiting room (gray). They then moved to the experiment start position (black circle) and their eyes were covered with an HMD on which still no images were projected. The experimenter took them along random trajectory (lines with arrows) to the room where experiments were carried out (Room A on the first day or Room B on the second and third days). After participants completed the trials on the day, they were taken out to the end position with their eyes closed. These were because participants could not specify where they performed experiments in 3 days
2.3 Experimental procedure and conditions
To explore the psychological and kinematic effects of absence of visual bodies and continuous motion images, three experimental conditions with different video presentation methods were used in this study. Participants performed the experimental conditions on different days. Baseline condition was carried out on the first day, and Continuous and Discontinuous conditions were carried out on the second and third days in random order.
Common protocol to three experimental conditions: The actions that participants were instructed to perform were the same in all three conditions. Participants were guided by the experimenter to the trial starting position with their eyes closed and stood with their feet together (start of trial positions represented by crosses in Fig. 1). With their eyes open and looking straight ahead, they took six steps forward at their own timing. After landing on the sixth step, they stood with their other foot together and closed their eyes. Then, they used a stopwatch to report the time it took from landing the first step to landing the sixth step. Keeping their eyes closed, they walked back to the place that they thought the starting position. The experimenter then guided them to the actual starting position. The above protocol was repeated 10 times. At the end of the tenth trial, participants were taken to the experiment end position outside the room (black circle in Fig. 1) with eyes closed along the complicated trajectory as well as the beginning. After removing the HMD, participants were instructed to complete the questionnaire in a waiting room.
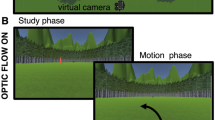
Baseline condition (providing visible body and optic flow, close to the real world): In this condition, participants wearing HMD could perceive their body and continuous motion images following their locomotion. Participants were guided to the trial starting position in Room A (Fig. 2a). Real-time images from a stereo camera (OVR VisionPro, Shinobiya.com Inc., Japan) attached to the front of the HMD are projected onto the HMD. After confirming that the participants can see their own bodies, they closed their eyes again and were instructed to perform the common protocol described in the previous section.

Overhead views of three experimental conditions in which, in common, participants, P, wearing an HMD took six steps forward from the start position of the trial on their own timing (solid arrows). a Baseline condition: Participants performed trials in Room A and viewed the motion images from the camera on the HMD (dotted arrows). b Continuous condition: Participants performed trials in Room B and viewed the motion images from the camera on the trolley that the experimenter, E, moved in Room A according to the participant's locomotion (dotted arrows). c Discontinuous condition: Participants performed trials in Room B and viewed the switching images from seven cameras that the experimenter, E, controlled in Room A according to the participant's locomotion (dotted arrows). Thus, we intended to make participants visually feel as they were in Room A in all conditions. Note that the alphabet e represents the experiment assistant
Continuous condition (providing invisible body and optic flow, inducing sufficient body awareness): In this condition, participants could not perceive their body but continuous motion images following their locomotion. Participants were guided to the trial starting position in Room B (Fig. 2b). Real-time images from a 360˚ camera (RICOH THETA S, Ricoh CO., Ltd., Japan) in Room A are projected onto the HMD. The camera is attached to a tripod on a trolley. The position of the camera was adjusted to the participant's eye level. Participants confirmed that their own body was visually absent despite being able to see visual scene from the position of the camera, and then closed their eyes again and were instructed to perform the common protocol. The experimenter moved the trolley straight ahead according to the participant's walk. The experimenter in Room A could see participants' walk timing by watching real-time images from a web camera installed in Room B. Thus, we intended to make participants feel as if they were performing the trial in Room A as in the baseline condition.
Discontinuous condition (providing invisible body and no optic flow, inducing insufficient body awareness): In this condition, participants wearing HMD could not perceive their body and were presented with discontinuous motion images following their locomotion. This condition was conducted in the same way as No-Body/Continuous condition except how to present the images of 360˚ camera (Fig. 2c). A total of seven 360˚ cameras, at the height of participant’s eye, were placed at equal intervals starting from the trial start position in Room A. The distance from the first to the seventh device was the average walking distance of each participant, which was measured in advance under Baseline condition. The experimenter switched the images on the HMD in order 6 times at the same time as the participant's footsteps.
2.4 Measurements and analysis
We assessed the virtual presence by evaluating the subjective feeling of being-there-now, immersion, and natural walking. In addition to the subjective reports, to estimate immersion, we measured moving duration that participants performed and retrospectively reported. It has been reported that time compression effects in VR environments might arise according to subjective feeling of immersion [25]. Moreover, to estimate if participants could perform natural walking as in the base line condition, we evaluated kinematic effects of moving distance and moving path fluctuation.
To test differences between three conditions, we applied one-way ANOVA and post hoc comparisons with t test corrected using extended Bonferroni procedure [26] to obtain data below. The significance level was set at p < .05. Data were analyzed with statistics software (R, The R Foundation for Statistical Computing, Vienna, Austria).
Subjective ratings: A questionnaire consisting of six statements was administered. The items (translated from Japanese) were as follows: (1) “I felt that I was actually in the room projected on HMD.”, related to the feeling of being-there; (2) “I felt that the scene I saw was pre-recorded one.”, related to the feeling of being-now; (3) “I felt that my walking moved the viewpoint.”, related to body awareness; (4) “I could walk as usual.”; (5) “I felt that something in the room changed during trials.” Participants indicated their responses on a visual analog scale with the seven guides arranged at equal intervals ranging from − 3 (strongly disagree) to + 3 (strongly agree).
Moving duration: Actual moving duration was recorded by the experimenter using a stopwatch in each trial. Reported moving duration was retrospectively estimated by participants using a stopwatch immediately after they finished walking in each trial. As for both measures, the average of 10 trials was used as data for each condition.
Moving distance: Moving distance from the start position to the goal position, i.e., actual moving distance, was recorded by the experimenter using a tape measure in each trial. Also, distance from the estimated start position, where participants returned at the end of each trial, to the actual start position, i.e., replicated moving distance, was recorded by the experimenter using a tape measure. As for both measures, the average of 10 trials was used as data for each condition.
Moving path fluctuation: Participants’ movements were recorded by a video camera (GoPro Hero6, Woodman Labs) installed near the ceiling of the experimental room (height above the floor: 2993 mm). From the video images, participants’ positions on the floor, represented by the center of both feet, were extracted at three frames per second. The origin of coordinates was set to the start position, (x, y) = (0 cm, 0 cm). The x-axis was set to the straight line passing through the start and goal positions. Then, a mean squared error (MSE) of y between x-axis and the moving path was calculated as moving path fluctuation in each trial. The average of 10 trials was used as data for each condition.
3 Results
3.1 Subjective ratings.
We found that there were significant differences among conditions for item 1, 2, and 3 and not in item 4 and 5 (Fig. 3), item 1: F(2, 22) = 8.47, p < .01, \(\eta^2 = 0.44\); item 2: F(2, 22) = 14.32, p < .001, \(\eta^2 = 0.57\); item 3: F(2, 22) = 6.85, p < .01, \(\eta^2 = 0.38\); item 4: F(2, 22) = 1.07, p = .36; item 5: F(2, 22) = 0.12, p = .88. Item 1, representing the feeling of being there, showed that the score of Continuous and Discontinuous conditions is significantly lower than that of Baseline condition, Baseline versus Continuous: t(11) = 3.01, p < .05, d = 0.87; Baseline versus Discontinuous: t(11) = 3.90, p < .01, d = 1.12; Continuous versus Discontinuous: t(11) = 1.13, p = .28. Item 2, representing the feeling of being in the past, showed that the score of Continuous and Discontinuous conditions is significantly higher than that of Baseline condition, Baseline versus Continuous: t(11) = 3.78, p < .01, d = 1.09; Baseline versus Discontinuous: t(11) = 5.39, p < .001, d = 1.55; Continuous versus Discontinuous: t(11) = 1.03, p = .32. Item 3, representing the feeling of self-motion, showed that the score of Discontinuous condition is (almost) significantly lower than that of Baseline and Continuous conditions, Baseline versus Continuous: t(11) = 1.35, p = .21; Baseline versus Discontinuous: t(11) = 4.05, p < .01, d = 1.17; Continuous versus Discontinuous: t(11) = 2.05, p = .06, d = 0.59.

Rating scores of subjective feelings. Box-and-Whisker plots represent the median of the data (thick lines), data between the first and third quartiles (boxes), and the maximum and minimum data (whiskers). Open circles show outliers. Asterisks (daggers) indicate the (almost) statistical significance in terms of post hoc test (†p < .10; *p < .05; **p < .01; ***p < .001)
3.2 Moving duration.
We found that there were significant differences among conditions for actual moving duration and reported moving duration (Fig. 4), Actual moving duration: F(2, 22) = 6.58, p < .01, \(\eta^2 = 0.37\); Reported moving duration: F(2, 22) = 3.97, p < .05, \(\eta^2 = 0.27\). Actual moving duration showed that the time of Continuous and Discontinuous conditions is significantly higher than that of Baseline condition, Baseline versus Continuous: t(11) = 4.06, p < .01, d = 1.17; Baseline versus Discontinuous: t(11) = 2.72, p < .05, d = 0.78; Continuous versus Discontinuous: t(11) = 1.14, p = .28. Reported moving duration showed that the time of Discontinuous condition almost significantly higher than that of Baseline and Continuous conditions, Baseline versus Continuous: t(11) = 0.19, p = .85; Baseline versus Discontinuous: t(11) = 2.07, p = .06, d = 0.60; Continuous versus Discontinuous: t(11) = 2.78, p < .05, d = 0.80.

Results of moving duration: the actual moving duration (a) and the reported moving duration (b). Error bars represent the standard error. Asterisks (daggers) indicate the (almost) statistical significance in terms of post hoc test (†p < .10; *p < .05; **p < .01)
3.1 Moving distance
We found no significant differences among conditions for actual moving distance and replicated moving distance, Actual moving distance: F(2, 22) = 2.40, p = .11 (Baseline: 324.9 ± 47.2 cm; Continuous: 347.7 ± 56.1 cm; Discontinuous: 339.9 ± 60.8 cm); Replicated moving distance: F(2, 22) = 0.05, p = .95 (Baseline: 74.6 ± 27.9 cm; Continuous: 73.6 ± 28.5 cm; Discontinuous: 75.3 ± 24.3 cm).
3.2 Moving path fluctuation
We found that there was significant difference among conditions for path fluctuation (Fig. 5), F(2, 22) = 5.34, p < .05, \(\eta^2 = 0.33\). Path fluctuation showed that the MSE value of Discontinuous condition is almost significantly lower than that of Baseline and Continuous conditions, Baseline versus Continuous: t(11) = 0.80, p = .44; Baseline versus Discontinuous: t(11) = 2.78, p = .05, d = 0.80; Continuous versus Discontinuous: t(11) = 2.62, p = .05, d = 0.76.

Results of path fluctuation. Error bars represent the standard error. Daggers indicate the almost statistical significance in terms of post hoc test (†p < .10)
4 Discussion and conclusion
This study explored the effects of body awareness tuned by visual presentation, while users move their viewpoint by voluntarily walking, on virtual presence in a camera-image VR environment. In comparison with the baseline condition close to the real environments, losing visual body per se decreased the feeling of being-there-now, as indicated by questionnaire items 1 and 2, unlike our expectations. However, in the continuous condition, participants reported the same level of moving duration with the baseline despite difference in actual duration, and also showed the same level of path fluctuation with the baseline. Therefore, providing continuous optic flow to induce sufficient body awareness in VR maintained virtual presence equivalent to the baseline in terms of immersion and natural walking, as opposed to providing discontinuous flow. Additionally, the lowest score on item 3 asking the sense of agency supported an induction of insufficient body awareness in the discontinuous condition. Scores on item 4 and 5 indicated that there were no differences in effects of wearing an HMD on subjective walk experience and in recognizing the environments, respectively. Moreover, the results of moving distance suggest that voluntarily walking could maintain distance feeling.
Optic flow itself can induce the perception of self-motion [27]. In the Continuous condition of our study, participants’ viewpoint continuously moved in accordance with their physical movements. Therefore, visually induced self-motion could be consistent with the actual motion, suggesting that this kind of consistency is likely to provide to some extent the reality of walking motion, referred to as the sense of agency [22], regardless of visibility of one’s body.
The strong feeling of body-ownership might need some object as a reference [18]. Therefore, there is a possibility that the absence of a reference in our study decreased the feeling of body-ownership and declined the feeling of being-there-now. However, positive average responses to questionnaire item 1 still suggest that the feeling of being-there is likely to be maintained even though the body is visibly lost.
VR has an advantage of being able to ignore physics in everyday life. Therefore, the reality emerging in VR environment should have unexpected aspects. Providing unusual perception, as in an invisible body and a discontinuous optic flow in this study, would be necessary to discover the reality of VR experience from different perspectives. Because this study focused on the body awareness tuned by visual presentation, an experimental condition involving visible body and discontinuous flow was not examined. Comparisons among four conditions would be necessary to reveal effects of visual presentation itself.
Data availability
All data are available from the corresponding author upon reasonable request.
References
Malachi EG, Tunggara R, Cahyadi Y, Meiliana, Fajar M (2023) A systematic literature review of virtual reality implementation in sports. In :International Conference on Artificial Intelligence in Information and Communication (ICAIIC), pp 382–385
Janeh O, Langbehn E, Steinicke F, Bruder G, Gulberti A, Poetter-Nerger M (2017) Walking in virtual reality: effects of manipulated visual self-motion on walking biomechanics. ACM Trans Appl Percept 14(2):1–15
Horsak B, Simonlehner M, Schöffer L, Dumphart B, Jalaeefar A, Husinsky M (2021) Overground walking in a fully immersive virtual reality: a comprehensive study on the effects on full-body walking biomechanics. Front Bioeng Biotechnol 9:780314
Huisman T, Ahrens A, MacDonald E (2021) Ambisonics sound source localization with varying amount of visual information in virtual reality. Front Virtual Reality 2:722321
Moullec Y, Cogné M, Saint-Aubert J, Lécuyer A (2023) Assisted walking-in-place: introducing assisted motion to walking-by-cycling in embodied virtual reality. IEEE Trans Visual Comput Graph 29(5):2796–2805
Fang Y, Liu Q, Xu Y, Guo Y, Zhao T (2023) Virtual reality interaction based on visual attention and kinaesthetic information. Virtual Reality 27(3):2183–2193
Yang CH (2021) Motion control of virtual reality based on an inertia-based sensing mechanism and a novel approach to redirected walking. Virtual Reality 26(2):479–500
León I, Tascón L, Ortells-Pareja JJ, Cimadevilla JM (2018) Virtual reality assessment of walking and non-walking space in men and women with virtual reality-based tasks. PLoS ONE 13(10):e0204995
Langbehn E, Lubos P, Steinicke F (2018) Evaluation of locomotion techniques for room-scale VR: joystick, teleportation, and redirected walking. In: Proceedings of the virtual reality international conference—laval virtual, no 4, pp 1–9
van Gemert T, Hornbæk K, Bergström J (2023) Step on it: asymmetric gain functions improve starting and stopping in virtual reality walking. Virtual Reality 27(2):777–795
Powell W, Simmonds M, Simmonds K, Shahrbanian S, Dereghezian T, Stevens B (2009) Treadmill walking in virtual reality vs. overground walking: a comparison of gait in individuals with and without pain. In: Frontiers in neuro engineering. Conference abstract: Annual CyberTherapy and CyberPsychology 2009 conference, vol 14
Benday A, Zadik S, BenGal O, Porras DC, Wenkert A, Gilaie-Dotan S, Plotnik M (2021) Vision Affects gait speed but not patterns of muscle activation during inclined walking—a virtual reality study. Front Bioeng Biotechnol 9:632594
Kopiske K, Heinrich E-M, Jahn G, Bendixen A, Einhäuser W (2023) Multisensory cues for walking in virtual reality: humans combine conflicting visual and self-motion information to reproduce distances. J Neurophysiol 130(4):1028–1040
Turchet L, Burelli P, Serafin S (2012) Haptic feedback for enhancing realism of walking simulations. IEEE Trans Haptics 6(1):35–45
Terziman L, Marchal M, Multon F, Arnaldi B, Lécuyer A (2012) The King-kong effects: improving sensation of walking in VR with visual and tactile vibrations at each step. In: 2012 IEEE symposium on 3D User Interfaces (3DUI), pp 19–26
Ikei Y, Shimabukuro S, Kato S, Komase K, Okuya Y, Hirota K, Amemiya T (2015) Five senses theatre project: sharing experiences through bodily ultra-reality. In: 2015 IEEE Virtual Reality (VR), p. 195–196
Kitazaki M, Hamada T, Yoshiho K, Kondo R, Amemiya T, Hirota K, Ikei Y (2019) Virtual walking sensation by prerecorded oscillating optic flow and synchronous foot vibration. i-Perception 10(5):204166951988244
Matsuda Y, Nakamura J, Amemiya T, Ikei Y, Kitazaki M (2021) Enhancing virtual walking sensation using self-avatar in first-person perspective and foot vibrations. Front Virtual Reality 2:654088
Weidner F, Boettcher G, Arboleda SA, Diao C, Sinani L, Kunert C, Raake A (2023) A systematic review on the visualization of avatars and agents in AR & VR displayed using Head-Mounted Displays. IEEE Trans Visual Comput Graph 29(5):2596–2606
Gonzalez-Franco M, Perez-Marcos D, Spanlang B, Slater M (2010) The contribution of real-time mirror reflections of motor actions on virtual body ownership in an immersive virtual environment. In: 2010 IEEE virtual reality conference (VR), pp 111–114
Slater M, Spanlang B, Sanchez-Vives MV, Blanke O (2010) First person experience of body transfer in virtual reality. PLoS ONE 5(5):e10564
Haggard P (2017) Sense of agency in the human brain. Nat Rev Neurosci 18(4):196–207
Sanchez-Vives MV, Slater M (2005) From presence to consciousness through virtual reality. Nat Rev Neurosci 6(4):332–339
Kokkinara E, Kilteni K, Blom KJ, Slater M (2016) First person perspective of seated participants over a walking virtual body leads to illusory agency over the walking. Sci Rep 6(1):28879
Schneider SM, Kisby CK, Flint EP (2011) Effect of virtual reality on time perception in patients receiving chemotherapy. Support Care Cancer 19:555–564
Shaffer JP (1986) Modified sequentially rejective multiple test procedures. J Am Stat Assoc 81(395):826–831
Palmisano S, Allison RS, Schira MM, Barry RJ (2015) Future challenges for vection research: definitions, functional significance, measures, and neural bases. Front Psychol. https://doi.org/10.3389/fpsyg.2015.0019
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work was presented in part at the joint symposium of the 29th International Symposium on Artificial Life and Robotics, the 9th International Symposium on BioComplexity, and the 7th International Symposium on Swarm Behavior and Bio-Inspired Robotics (Beppu, Oita and Online, January 24–26, 2024).
Rights and permissions
This article is published under an open access license. Please check the 'Copyright Information' section either on this page or in the PDF for details of this license and what re-use is permitted. If your intended use exceeds what is permitted by the license or if you are unable to locate the licence and re-use information, please contact the Rights and Permissions team.
About this article

Cite this article
Weerashinghe, A., Kobayashi, H., Nomura, S. et al. Effects of invisible body and optic flow on experience of users voluntarily walking in a VR environment. Artif Life Robotics (2024). https://doi.org/10.1007/s10015-024-00958-3
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10015-024-00958-3