
Abstract
This paper presents an agile method for accurately estimating the steel weight of a new ship in the preliminary design stage. A container ship database within a three-dimensional computer-aided design system was used to facilitate the division of a ship into several estimated structural sections, including the forward, cargo, engine room, aft, etc. This procedure is an improvement over the traditional parametric estimation process, which only estimates a rough weight for an entire ship based on specific empirical formulas and then assigns a weight to each part of the ship manually. To estimate the steel weight of a new ship, the parameters of the individual sections are referenced from a similar vessel automatically selected using the principal dimension. Next, principal component analysis is applied to define the principal parameters, i.e., the principal dimension, the feature of each section and the fitting coefficient of the principal parameters. The general equations with the highest correlative predictor variables for the individual sections are then obtained by regression. Comparing the estimation variability, the section estimation provides a more accurate steel weight and constitutes a new means of efficiently obtaining the weight distribution to support the various aspects of preliminary design, i.e., the determination of the center of gravity, the design of the ship lines and ship performance evaluation.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The estimation of steel weight is an important task for the design and cost calculation of merchant ships. Because the steel weight is the main component of the weight of a light ship [1], it accounts for more than 70 % of the weight component and 20 % of the material costs in large container ships with capacities greater than 8000 twenty-foot equivalent units (TEU), as determined using our research database. Therefore, this measurement decisively influences the weight calculation and is also a critical cost item in the tender of a new shipbuilding contract.
During this preliminary design phase, it is difficult to conduct the detailed weight calculations necessary for a new type of ship. Because neither a completed three-dimensional (3D) computer-aided design (CAD) ship model nor a reasonable general arrangement plan has been prepared in this phase, only a rough arrangement is available using the principal available parameters. Hence, we concentrate on developing a quick and precise method for steel weight estimation using the specific parameters obtained in the design phase.
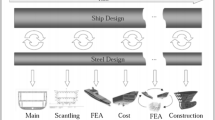
The classic parametric method, shown in Fig. 1, only provides a rough estimate of the hull weight based on overall ship parameters and does not reflect local design features. The use of parametric estimation based on several reference ships and regression lines by the use of built-in formulas. Many approximate methods using parametric formulae have been derived based on such minimal information, i.e., the length L, breadth B, depth D, draft d, and block coefficient C B [1–5]. As the parametric estimations, the format of the equation is often a combination of the correlative principal parameters to obtain linear, area or volume relationships using L, B, D, and C B. A review of the formats of these formulas identified k × L a × B b × D c × C dB (cubic number) [6] and k × L a(B + D) [7] as the two most popular forms; functions of these types are still used in ship design today. However, these studies only used fixed arguments and did not consider the optimum values of k, a, b, c, d [8, 9]. The estimated result influences aspects related to the preliminary design, i.e., the center of gravity, speed and power calculations; the design of ship lines for performance evaluation; and the cost of a new ship.

Parametric estimation
The standards for steel used in ship design have been raised over time. For example, a bulk carrier satisfying the common structural rules will have a higher hull steel weight [10]; the hull steel weight also can be reduced by the use of high tensile steel [1, 11]. The parametric estimation method is generally only relevant to the parameters of the entire ship and does not reflect changes in the local design features, such as the parallel mid-ship section, bow type, and forecastle patterns. Although this method could be quickly introduced for general use, the choice of the appropriate formula and coefficients for a particular ship type has been a historically difficult issue in practical applications.
To obtain more accurate estimations, a practical method based on the midship section design is widely used by classification societies and shipyards. The weight can be calculated by designing the scantlings of the midship section, calculating the structural limits and bending moments, and estimating the weight distribution [12]. For more precise estimates, the ship can be divided into sections that are considered separately. However, the need for human intervention and the processing time required for the design process is still the major limit in the early design stage, despite the emergence of CAD systems as powerful design tools.
As a result of the capabilities of CAD, ship division is a popular methodology for the initial estimation in the industry. In a previous study, a segment framework of the ship structure was applied to estimate the preliminary cost [13]. The qualitative complexity criteria have also been considered for estimating six segments of a ship in the concept design stage [14]. Mano applied a section-based method to estimate the weight of the sections, including the fore, cargo, aft and superstructures. This method is based on the midship section design, which calculates the steel weight of the longitudinal structures using the principal dimensions and length of the section and calculates the weight of the bulkheads by summing the lengths of all the bulkheads for each section. This method also considers the influence of high tensile steel by analyzing the midship section design [15]. Because it requires more information due to the inclusion of the bulkheads, this approach is better suited to cases in which the general arrangement and subdivisions are already approximately known. In another study, a feature-based method based on principal component analysis (PCA) was presented to analyze and estimate the segment weight of ships [16]. We adopt this concept aiming to design a new parametric method that divides the main hull into several estimated sections. In this design approach, a ship is divided into several sections, including the fore, aft, engine room, deckhouse, etc. Each section can be represented by the specific block of various differently built ships. By the association of local variables, the method is able to consider individual differences in weight. However, a parametric estimation that combines section estimations is quite complex for the selection of the significant associated parameters and their appropriate coefficients. Therefore, this study focuses on the question of how to obtain the best-fitting regression model for the reasonable partition of the entire ship by automatically selecting the parameters and reference data. The relationship between the principal dimension parameters and the section parameters is then identified. Using the main dimension parameters, the method estimates the section parameters, which are in turn used to estimate the section weight in a simple model.
In this paper, we propose an innovative estimation method, parametric section-based estimation (PSE), which derives the optimum coefficient of the individual parameter applied to support the division of a ship into several estimated structural sections. Figure 2 shows the procedure for this method, and Fig. 3 shows the details of the section framework. First, this section framework is derived by dividing the container ship into various sections: forward, cargo, engine room, aft, forecastle, and deckhouse. To implement the early stage estimation, the parameters of the individual sections are referenced from a similar vessel selected only using the principal dimension. To obtain more accurate results, more parameters can be used to develop the corrected procedures after a preliminary estimate. Second, the concept of PSE establishes the middleware tire to extract section characteristics by linking the principal dimension and the past detail design information for the preliminary estimation based on the ship arrangement and 3D CAD models.

Parametric section-based estimation

Section framework
In Sect. 2, we present the definition of the section parameters of the framework and then build the estimated database. We refer to the PCA-based ship cost estimation method [17] and then analyze the principal parameters of these sections. PCA identifies the variables that are highly correlated with the hull steel weight by eigenvalue and eigenvector computations. The identified physical parameters and the participation factors of the important principal components then serve as the predictor variables. The highest correlative predictor variables for each section are identified by regression with exponents. In Sect. 3, we describe the proposed PSE process, as shown in Fig. 2a, and derive the equation for estimating the steel weight and adjusting the treatments of each section, as shown in Fig. 2b. The formula is based on the cubic number format, which estimates each section of the entire ship using the principal dimensions and one or two local factors. In Sect. 4, we demonstrate the method and its practicality and effectiveness. The section estimation results are presented and compared with those obtained from methods that only use overall ship parameters. Finally, in Sect. 5, we provide conclusions and describe future work. Using the proposed method, it is possible to obtain an accurate weight estimation for a new ship.
2 Section framework and database
Instead of estimating the complete hull, PSE divides the hull into subgroups that are estimated separately. By choosing a single type of ship, this study avoids the estimation error resulting from the differences in configuration among various ship types. Although container ships have different sizes, their interior structures are similar. Referring to the general structural section of 31 historical container vessels at the collaborative shipyard, this section framework is presented in Fig. 3. We analyzed the general arrangements to establish a general model for this section estimation.
The hull steel weight is traditionally divided into the hull and superstructure, as shown in Fig. 3a, each of which is further divided into smaller sections. The container ship is divided into 6 structural sections: the forward, cargo, engine room, aft, forecastle, and deckhouse. L 0–L 5 are the major section parameters for reflecting the design changes resulting from different ship owners’ requirements of different levels of speed and flexibility in the estimation. We found that a more subtle partition requires the input of more parameters but does not improve the accuracy of the estimation and thus is not conducive to application in the preliminary design. In this study, the weights of two small parts, the rudder and funnel, are not estimated; the directly added weight is used instead.
Figure 3 and Table 1 show the scope of the individual sections assembled using a combination of internal blocks. Each section is composed of its own main structural parts to capture the characteristics of the section itself. Next, the local variables of the section are measured from the block arrangements and 3D CAD models, as shown in Fig. 3b, c. The list of blocks for each section may be obtained from the block arrangement, the 3D model of the ships, and the shipyard’s naming standard. Next, the exact section data are obtained by summing the weights from the database of 3D CAD models.
2.1 Ship selection
First, 31 vessels from the initial database were classified into 10 categories by size. Because the use of reference ships with the same principal dimensions would significantly reduce the accuracy of the regression results, these ships should be omitted, as should those with special or obsolete designs. We thus selected the most recent design types for ships of various sizes to obtain representative data. Next, 9 vessels with the same dimensions, 8 vessels designed by other companies, and 3 vessels for which the complete lofting drawings are lacking were omitted. Furthermore, 2 new vessels for which the complete structural drawings are still being developed were omitted. Nine more modern designs for 9 capacity categories, ranging from 2000 to 8500 TEU, were selected. It was assumed that these 9 categories must be satisfied by the various general designs. The minimum capacity category, 1000 TEU, was omitted because the lofting drawings are incomplete and it was built in a different shipyard using special subdivisions. Because this type of ship has less market demand and is of the minimal length, it may be considered an outlier. The selection steps are presented in Fig. 4, and the selection strategies are as follows:
-
Only container vessels are used in the project.
-
The reference data are sufficiently disperse.
-
Old designs are omitted.
-
Series ships are omitted.
-
The design is conducted by the same shipyard.
-
The ship data contain the details in lofting drawings that can be checked using the data for the itemized structures.

Ship selection
2.2 Section and parameter definition
Many hull steel weight coefficients exist, and these factors are classified by the global variables and local section variables of each vessel. The global variables consist of the principal dimensions and coefficients of ships, relative ship features, layouts, and main characteristics; the local section variables are based on the defined framework of the sections of the container vessels in Fig. 3. The ship parameters listed above are collected and classified by the configured section, as shown in Table 1.
2.2.1 Global parameters
Four important parameters are investigated in this research: L (length between perpendiculars), B (breadth), D (depth), and C B (block coefficient). Most pieces of the hull (outer plate, bottom structure, decks, bulkheads, etc.) are related to the length. In terms of strength, longer pieces suffer greater longitudinal torques, and the longitudinal structural piece must be larger in size or constructed from a larger quantity of material. Therefore, L is one of the most significant factors in weight.
B is the second factor. The geometry and quantity of the transverse pieces (bottom structure, deck, transverse bulkhead, etc.) are related to the breadth. In terms of strength, the breadth has a greater impact on the transverse strength but little effect on the longitudinal strength. Therefore, the influence of the breadth pieces on the hull steel weight is secondary to that of the length pieces.
D is the third factor. The vertical height is measured from the bottom of the keel to the lower surface of the upper deck within the mid-ship section. The geometry and quantity of the pieces in this section (ribs, bulkheads, side plating, etc.) are related to the depth. However, in terms of strength, the depth of large ships with greater depth has little effect on the weight; thus, the depth is a less important factor for the hull steel weight. Because draft d and D have similar features and D has a larger proportional effect, D is selected as the estimated parameter and d as an optional correction parameter.
The three essential parameters L, B, and D are applied to the section estimation in the research. We also find that the best estimation can be obtained by combining the local length, width, and height of each section for the section estimation.
Many hull geometry coefficients are used as guides for the fatness or slimness of the hull. However, accurate coefficients often cannot be obtained during the preliminary ship design phase. Because C B is the most frequently used coefficient related to the weight estimation, it is regarded as an optional parameter in this study. For container vessels, C B takes values of 0.6–0.7. This coefficient describes the geometry type below the waterline in terms of the ratio of the volume of displacement to the volume of a rectangular block whose sides are equal to the maximum breadth, the mean draught, and the length of the design waterline.
2.2.2 Section parameters
The most important factors are the local length, width, and height of sections. Table 1 and Fig. 3 show the sensitive parameters of each section based on the PSE framework. For unquantifiable parameters, such as the stem type, bow type, accommodation type, engine room space and aft cargo space, we provide a classification code for the selection of the sections. In addition, we collect the section-related design parameters used to analyze the section, such as the section size, cross-sectional area, weight distribution of the section for various ship sizes, and section location.
3 Parametric section-based estimation (PSE)
The PSE procedure consists of two steps. First, PSE uses the several parameters that determine the standard weight in the conceptual design stage. After determining the principal dimensions, each section’s weight may be calculated by referring to the parameters of the corresponding section in the fitting standard ship based on the principal dimensions. Second, the standard weight may be modified based on the estimated standard weight using optional parameters, i.e., C B and B/d.
If we adjust the section parameters, the initial estimation is quickly modified based on the design of this new ship. Finally, the real parameters of the individual sections are obtained to fix the estimated weight from a fixed rough arrangement negotiated with the ship owner. Figure 2a outlines the sequential steps of PSE, which are described below.
3.1 PCA parameter analysis
PCA is a multivariate analysis method that is widely used in statistics in various fields [18, 19], i.e., system engineering [17] and gene analysis [20]. The earliest descriptions of PCA were given by Pearson in 1901 [21] and Hotelling in 1933 [22]. We apply PCA to derive the value of the weight factor for each parameter and subsequently identify the important physical characteristics of the ships, namely, those with the highest correlation with the weight. PCA is mathematically defined [19] as an orthogonal linear transformation that transforms the data into a new coordinate system such that the greatest variance by any projection of the data lies on the first coordinate (referred to as the first principal component), the second greatest variance lies on the second coordinate, etc. PCA is often used to reduce the dimensions of data sets, and the data set with the largest contribution to the variance characteristics is retained. The data sets are collected by retaining the low-order principal component and ignoring the higher-order principal components. PCA can then calculate the combinations of these variables. The largest eigenvector aligns with the direction of greatest variation in the data, which calculates the individual first principal component (PC) as
where the index i represents data corresponding to a different ship; \(X = \left( {x_{1} ,\text{ } \ldots \text{ },x_{m} } \right)\) consists of m physical parameters; t is the transposed matrix; and \(A_{ \hbox{max} } = \left( {a_{1} ,\text{ } \ldots \text{ },a_{m} } \right)\) is the corresponding eigenvector of the largest eigenvalue of the matrix. Each item of A max is treated as a weighting factor for the corresponding physical parameter. The higher the value of the term in A max, the greater is the influence of the parameter. We can then analyze the influence of each parameter in A max to select the principal parameters.
By combining the correlative principal parameters in terms of area or volume relationships [23], these factors are analyzed again by PCA. Hence, the significant input correlation parameters are determined such that PC(i) is an independent variable and the hull steel weight is a dependent variable to establish a regression model in this research.
3.1.1 Structure factor
The still water bending moment and shear force calculations, which determine the bending moment and hull girder shear force values along the vessel’s entire length, are to be submitted together with the distribution of the lightship weights. The maximum bending moment can be defined as:
where M is the moment and Z is the modulus of the effective structural section.
As the ship length decreases, the bending moment also decreases. Furthermore, the equivalent thickness of the section decreases with the ship length. Hence, the parameter L is the most important item. In the rules of the American Bureau of Shipping (ABS) and other class societies, the wave bending moment is generally expressed as (C b + 0.7)L 2 B, where the still water bending moment does not exceed the approximate wave bending moment. The envelopes of the maximum shearing forces may be obtained from (C b + 0.7)L × B, and the bending moment and the modulus-related term are the same [24]. The modulus-related term may also be expressed as C 0.5 b L 2 B. The hull steel weight may then be deduced as a modulus-related and a volume-related term L × B × D). The combined expression is then deduced as C 0.5 b [a 1(L 2 B)L × D −1 + a 2 L × B × D] [25]. This expression is similar to C 1/3 b [a 1 L 3.3 B × D −1 + a 2 L(B + D)2] in Sato’s research [26]. However, previous studies assumed that the inclusion of this term would lead to a more accurate weight estimation, but the selection of the values of the coefficients a 1 and a 2 for various ship types is difficult. An expression using more items may add (1) a modulus-related term to C a b L 3 B × D −1, (2) the side shell and longitudinal bulkheads to C b b L 2 D, (3) transverse frame beam bulkhead to C c b L × B × D, (4) platform decks and flats to C d b L 2 B, and (5) superstructure and deck fittings to LB 2, where C b is taken as an index exponent [25]. Other general design variables include L/B, L/D, and B/d. These terms and dead weight tonnage (DWT), TEU, and the still water bending moment (MS) have been considered in Eq. 1.
3.1.2 Midship section and steel grade
Two types of midship sections are used in Fig. 5. The left-hand type is more popular in containerships. Because the right-hand type is only applied to one of the smaller containerships among the ships selected from the database, the types are not estimated. However, if the types are more complicated, the type of the analyzed ship should be classified, or the estimated result should be corrected based on the type.

Two midship section types
Although the moment MS is high, the weight of the section may be decreased using high-tension steel. High-tension steel is mainly applied in the four hull sections, and its use ratio may be modified. The use ratio for the high-tension steel for the entire ships is between 45 and 55 %, except for Ship 4, in which almost no high-tension steel is applied. Although the use ratio of high-tension steel in the cargo section is generally close to 60 %, the ratio for ship 4 is less than 3 %.
A precise numerical correction is beyond the scope of this study, but the ratio is an important factor in the estimation. Hence, if the ratio is high, the section will be overestimated.
3.2 Reference ship selection
At the beginning of a new design phase, the principal dimension of the new ship is only the known parameter; most section parameters may not yet be configured. In this case, we can utilize a more convenient treatment to apply this method. When the dimension of the sections of the new ship is not available, the dimension of the sections can be determined from a similar ship.
After analyzing these parameters for the entire ship by PCA in Eq. 1, we find that the L, B, D, and DWT are important for selecting the reference ship most similar to the design ship. The similarity is obtained using PCA, which calculates the individual PC by Eq. 1; next, these nearest neighborhood PCs are chosen by
The parameters of the individual sections can be approximated as the values from the reference ship. However, the dimensions of the new ship are usually different from those of the reference ship. The correction factor is defined using the ratio of the design ship parameter to the reference ship parameter, i.e., L/L R, B/B R, and D/D R, which are used to modify each section parameter for the conceptual ship. For a more precise estimation, the parameters of the individual sections should be obtained later from the rough arrangement negotiated with the ship owner to adjust the estimated weight in the beginning of the design stage.
3.3 Weight estimation
The traditional parametric estimation only provides a rough estimate of the total weight using the overall ship parameters and does not reflect local design features. To improve upon this method, the present method estimates each section for the entire ship and assumes that one section may be estimated using the section dimensions and one or two local factors.
Considering the principal dimensions and the parameters of the sections, we chose the most important parameters, namely, those with large weights in the PCA. We find that the hull weight of a ship is primarily a function of the principal dimensions length L, breadth B, and depth D and one or two local parameters. The combination of the natural logarithms of the variables is defined as:
where P 4–P m are the section parameters, the over bar signifies the average value of the parameters, and a 1–a m are calculated by Eq. 4 of the PCA. According to PCA, the principal parameters may then have significant weighting factors, whereas the weighting factors of the other parameters are close to zero. P 4 is usually the length of the section, and other section parameters may be optional if the specific section has four principal parameters. For calculation convenience, irrelevant parameters can be taken as “1”, in which case the item has no influence in the PCA. More section parameters are described in Table 1.
Equation 4 differs from the traditional equation, in which only the entire ship or local parameters are used. Equation 4 may then be written as:
and
Equation 6 is equivalent to
The PC for all sections may be calculated from the principal parameters and is defined as:
When establishing the regression model, PC is treated as an independent variable and the hull steel weight as a dependent variable. The regression model is defined as:
where W e is the estimated weight and α and β are determined by regression.
3.4 Weight modification
The modification process is defined as:
where W s is the real weight of the section and x is the parameter of the modification. This process is applied when the value of the parameter is between the maximum and minimum reference values for ships. For the forward, cargo, engine room, and aft sections of the hull, because the shape of the section is not uniform, we make x dependent on C B to modify the weight to account for the effect of the form factor. The parameter of the modification B/d is then also applied to modify the effect of the freeboard and breadth.
The engine room has two possible configurations: one that includes aft cargo and one that does not. To estimate the section weight for smaller container vessels, these steps are similar to those for the cargo section. In larger vessels, however, the engine room section also contains cargo space, and a special modification is thus required by the aft cargo length (L 3 − L 2).
Finally, we sum all estimated weights to obtain the total weight,
4 Comparative study
4.1 Entire estimation
Tables 2, 3 and Fig. 6 compare four methods with our database to estimate the steel weight. Method (a) is PSE, which divides the ship into 6 sections based on the selected 9 ships. Meanwhile, Methods (b)–(d) use the equations 0.034 × L 1.7 × B 0.7 × D 0.4 × C 0.5B [9], k × L × B × D × C 0.5B [3], and k × L 1.6(B + D) [8], respectively. Because the exponential regression model equation is significantly proper [3], the maximum errors and standard deviation are lower than those in the linear regression in this study. Thus, these methods determine the coefficient k using the exponential regression analysis of the same 9 ships. For these models, the R-squared are greater than 0.99, and the P values are less than 0.01, which indicates that the models are proper.

Comparison of the estimation results
Table 3 shows the standard deviation, average, maximum error, and minimum error for Methods (a)–(d). Specifically, these values are, respectively (1.67, 1.04, 3.22, −2.45 %) for Method (a), (8.80, 6.73, 10.20, −13.67 %) for Method (b), (3.38, 2.67, 6.80, −4.93 %) for Method (c), and (4.26, 3.70, 7.25, −6.18 %) for Method (d). The overall error of Method (a) is considerably lower than those of the other methods. This method has also a smaller standard deviation and error range (±5.67 %) and provides a significantly lower and more stable result. Hence, the estimated model is better for these modern target ships.
4.1.1 Influence of the steel grade
The major error in Ship 4 occurs because the ratio of the high-tension steel is close to zero, compared to values between 45 and 55 % for the other ships. The estimated results also explain the change in the consistency of the factor. Thus, it would be beneficial to further analyze the features of the steel grade with more ships of this type.
4.2 Section estimation
Using the established estimation model, Tables 4 and 5 show the 6 section estimations based on Method (a). Figure 7 shows that the two main sections, the cargo and the engine room, account for almost 70 % of the total weight and have accurate estimate results. Figure 8 presents the other sections. Once again, the major error incurred in Ship 4 is due to the influence of the steel grade. Figure 9 presents the distributions of the parameters. Because the distribution change for the different parameters is not consistent with the length of the aft cargo, it is necessary to consider the section parameters. In particular, the ratio of the section length of the cargo-to-engine room is significantly different for Ships I and J despite their similar ship lengths. For the engine room, it is more appropriate to divide this section into three types for the optimal estimation: the no aft cargo space, cargo space above the deck, and full aft cargo space. For the cargo, the still water bending moment (WS) is strongly correlated with the weight. The parameters are also taken in combination with the term from Eq. 7b, as shown in Fig. 10. The estimated result of Method (m1) using the original parameters and WS is similar to that of the original Method (a). However, the standard deviation is 0.5 % higher. Method (m2), using only WS, does not provide a good fit, having a greater number of outliers. The estimated error using WS would be higher for smaller ships because the standards require WS to have different conditions along the ship length. The values for these parameters could be chosen more suitably by selecting several similar ships within the limited length of the ships. In this study, DWT is influenced little by the section weight, but it is the most consistent change parameter for the weight of the entire ship.

Estimation error for the cargo and engine room sections

Estimation error for the other sections

Distributions of the parameters

Estimation error for the cargo section with the still water bending moment
For the forward and aft, the error can be improved to less than 10 % by the modification of the individual maximum cross-sectional area. However, the sectional area for the forward and aft of new ships is usually not available in the design phase. Thus, this parameter could be more useful in determining the category of the sections of the reference ships. The value of this parameter could also be obtained directly from the forward of ships of a similar type in terms of the ratio of the aft-to-ship length and the principal dimensions.
For the superstructure, the optimal results for the forecastle are achieved by using the section parameters only, whereas the estimation for the deckhouse requires the entire ship and section parameters. For the deckhouse, the major error in Ship J occurs because the shipowner used a special design that provides a larger floor area in the deckhouse. It is appropriate to divide the deckhouse type based on the total floor area for ships of a similar length and width.
4.3 Method validation
Method (a1) presents a validation of the usefulness of this method based on the estimates for each ship using the other 8 ships as the training population. Figure 11 presents the results. The maximum error is found in Ship 4. Except for this case, the error is less approximately ±5 %, and the standard deviation is approximately 2.85 %. The experimental results also show that the average error may be controlled. Hence, the model may be more robust for new ships or outliers.

Validation of the estimation
5 Conclusions
A parametric method that estimates the steel weight for each main structure section is proposed to derive the best-fitting estimation equation and its coefficients in the preliminary design phase. PCA is applied to find the principal influence parameters, including the global and local design factors, and to calculate the weighting values for each parameter. Next, the most correlative predictor variables for each section are determined by parameter combinations with exponents. Finally, the fitting data for the regression are retrieved automatically via the similarity of the principal parameters.
This method improves upon the traditional parametric estimates and may be more robust for new ships or outliers. Four estimation methods are defined to compare the estimation variability: the first estimates each section, and other three estimate the entire ship directly. The range of maximum–minimum errors for the first method, which sums the weights for each section, is 3.22 %. Meanwhile, the corresponding ranges for the three traditional entire ship methods are 23.87, 11.73, and 13.43 %. The error for the first method is 1.04 %, while the average errors for the three traditional methods are 6.73, 2.67, and 3.70 %. The study finds that the section-based estimation method clearly provides a lower average error and a smaller error range than the entire ship estimation methods. The standard deviation of this method (1.67 %) is also lower; thus, this method is able to provide a more accurate steel weight.
Future work will extend this method to other types of ships, such as bulk carriers. In the study findings, the configured framework is the most important factor for the success of the method, especially in the cabin and cargo region. An inappropriate choice of framework will lead to accumulated weight error. Therefore, in considering whether the ship section division is too subtle, certain sections should be integrated or adjusted to estimate the materials and cost of various stages of system engineering.
References
Watson DG (2002) Practical ship design, vol 1. Elsevier, Amsterdam
Kazuhiko M (1998) Rough estimation of light weight and ship price. Sci Ships 51:59–63
Aasen R, Bjorhovde S (2010) Early stage weight and cog estimation using parametric formulas and regression on historical data. In: 69th annual conference. Society of Allied Weight Engineers, Inc., Virginia Beach, Virginia
Žanić V, Čudina P (2009) Multiattribute decision making methodology in the concept design of tankers and bulk carriers. Brodogradnja 60:19–43
Barrass B (2004) Ship design and performance for masters and mates. Elsevier Butterworth-Heinemann, Burlington
Bertram V, Schneekluth H (1998) Ship design for efficiency and economy. Butterworth-Heinemann, Woburn
造船テキスト研究会 (2009) 商船設計の基礎知識. 成山堂書店
Yang Y-S, Park C-K, Lee K-H, Suh J-C (2007) A study on the preliminary ship design method using deterministic approach and probabilistic approach including hull form. Struct Multidiscip Optim 33:529–539
Hart CG, Vlahopoulos N (2010) An integrated multidisciplinary particle swarm optimization approach to conceptual ship design. Struct Multidiscip Optim 41:481–494
Zakki AF (2013) The assessment of CSR regulations implementation on the midship strength and structural weight of 77.500 DWT bulk carrier. Indones J Naval Archit 1:1–7
Løseth R, Sekkesæter G, Valsgård S (1994) Economics of high-tensile steel in ship hulls. Mar Struct 7:31–50
Det Norske Veritas AS (2011) Strength analysis of hull structures in container ships. Det Norske Veritas AS (DNV), Norway
M-j Son, Lee SC, K-c Kwon, T-w Kim, Sharma R (2011) Configuration estimation method for preliminary cost of ships based on engineering bills of materials. J Mar Sci Technol 16:367–378
Caprace JD, Rigo P (2011) Ship complexity assessment at the concept design stage. J Mar Sci Technol 16:68–75
Mano Shigemasa (1991) Memorandum on hull structural design-22. Sci Ships 44:99–104
Lin C-K, Shaw H-J (2015) Feature-based estimation of steel weight in shipbuilding. Ocean Eng 107:193–203
Hart CG, He Z, Sbragio R, Vlahopoulos N (2012) An advanced cost estimation methodology for engineering systems. Syst Eng 15:28–40
Jackson JE (2005) A user’s guide to principal components, vol 587. Wiley, Hoboken
It J (2002) Principal component analysis. Springer Series in Statistics, New York
Joshi BK, Panthee DR (2011) Information theory and multivariate techniques for analyzing DNA sequence data: an example from tomato genes. Nepal J Biotechnol 1:1–9
Pearson K (1901) On lines and planes of closest fit to systems of points in space. Philos Mag 2:559–572
Hotelling H (1933) Analysis of a complex of statistical variables into principal components. J Educ Psychol 24:417–441
Nowacki H (2010) Five decades of computer-aided ship design. Comput-Aided Des 42:956–969
American Bureau of Shipping (2011) Rules for building and classing steel vessels. American Bureau of Shipping (ABS), New York
Watson D, Gilfillan A (1977) Some ship design methods. Royal Institution of Naval Architects, London
Sato S (1967) Effects of principal dimensions on weight and cost of large ships. SNAME, New York Metropolitan Section, February
Author information
Authors and Affiliations
Corresponding author
About this article

Cite this article
Lin, CK., Shaw, HJ. Preliminary parametric estimation of steel weight for new ships. J Mar Sci Technol 21, 227–239 (2016). https://doi.org/10.1007/s00773-015-0345-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00773-015-0345-y