
Abstract
Excavation of shallow-buried, hard rock masses usually leads to the instability of rock blocks delimited by discontinuity planes. Classic block theory only deals with the stability of rock blocks on the exposed surfaces. However, in rock engineering practice, it is quite common that when surface unstable blocks collapse along with their constraints to adjacent blocks released, more inner blocks will be exposed to the surface and become unstable or fall down. This process is termed the progressive failure of blocky rock mass. Based on three-dimensional (3D) block-cutting analysis, the removable blocks in progressive failure process can be determined through geometrical and kinematics analysis. This study proposes to further identify unstable key blocks from removable blocks using mechanical analysis. On this basis, the anchoring force required for all of randomly distributed key blocks is calculated, and the spatial distribution of the required anchoring force per unit area of the free surface are analyzed, with suitable probability distribution obtained. Afterwards, adopting reliability-based design concept, the design scheme for systematic rock bolting to prevent progressive failure of blocky rock mass is discussed, and the method is presented for estimating the anchoring force of individual rock bolt, bolt spacing, and anchorage length.
Highlights
-
Progressive failure of blocky rock is analyzed through the geometrical-mechanical identification of key blocks.
-
A new approach to assess the required anchoring force per unit area of rock excavation surface is proposed.
-
Systematic rock-bolting design scheme for coping with progressive failure is presented and discussed.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The key block methods (Warburton 1981; Goodman and Shi 1985) have been widely used to evaluate the stability of rock masses for their simplicity and high efficiency. Among them, block theory proposed by Goodman and Shi (1985) is capable of identifying removable and key blocks by virtue of the finiteness and removability theorems. The rock blocks investigated in classic block theory are only those exposed to free surfaces. However, in engineering practice, it is common that once surface blocks collapse, the constraints they impose on adjacent inside blocks will vanish, leading to more blocks being exposed to surfaces and falling down (Lin and Fairhurst 1988; Wibowo 1997; Yarahmadi-Bafghi and Verdel 2003; Shi 2006; Fu et al. 2014, 2016). This phenomenon is termed progressive failure of blocky rock system. Compared with traditional key block methods, a progressive failure analysis can identify all removable blocks (or termed potentially unstable blocks as they will become unstable when the shearing resistance is insufficient) and key blocks (unstable blocks that require support or reinforcement), and furthermore, it can take into account of the influences of geometric characteristics of rock mass discontinuities (e.g. finite extents, varying spacing, and arbitrary spatial distribution) and avoid the latent risk arising from considering only the surface key blocks.
An early work by Lin and Fairhurst (1988) on the static stability assessment of 3D blocky system, based on the combined use of graph theory and algebraic topology concept, accomplished a primary analysis of progressive failure of rock blocks. In their study, a well-formed topological data structure for a multi-block system, which resembles the result yielded by 3D block-cutting analysis, was constructed following the method by Lin et al (1987) and then used as input data for implementing a directed graph procedure to identify removable blocks and to determine the influence of the removal of such blocks on the neighbouring blocks. When applying this graphic method, all those surface removable blocks identified through vector analysis were first marked as root nodes, and their adjacent blocks, referred to as ‘descendant’ nodes, were detected based on the criterion that the root (or ancestor) and descendant nodes (i.e. blocks) have a common polygonal face or that a face belonging to ancestor node properly contains a face of descendant node. In this manner, all the offspring of the root nodes were searched out and taken as removable blocks. However, as demonstrated by the results obtained from more sophisticated 3D block-cutting analysis, it is also likely that, on the contact plane, the face of a designated ancestor node is smaller than that of its adjacent block; obviously, the adjacent block of such type will be omitted if employing the above-mentioned search criterion. Despite this, the work by Lin and Fairhurst (1988) can be considered as pioneering, particularly in the days of limited computational power. Wibowo (1997) proposed that when a primary key block is removed, its adjacent blocks which were originally non-removable could become removable blocks. Such new removable blocks are designated as secondary blocks. The ‘secondary block’ concept can be extended for analyzing the progressive failure process. Yarahmadi-Bafghi and Verdel (2003) presented the key-group method, which considers not only individual key blocks but also groups of collapsible blocks in a progressive stability analysis, and established a six-step block-grouping technique for identifying key groups. The key-group method is developed into three dimensions by Noroozi et al. (2011). Although key-group method can identify multiple batches of removable blocks, a major difficulty that persists is how to define potentially unstable block groups, especially when a complicated discrete fracture network (DFN) is taken into account.
Based on the discontinuity network modelling (e.g. using Monte-Carlo simulation), stochastic key block analysis has been proposed (Shi and Goodman 1989; Shapiro and Delport 1991; Hatzor and Feintuch 2005). This method can search out multiple unstable blocks from a simulated discontinuity network, whereas it only deals with the blocks located on free or excavation surface of rock mass. 3D block-cutting analysis (Lin et al. 1987; Jing 2000; Shi 2006; Elmouttie et al. 2010; Zhang and Lei 2013; Zhang 2015; Zheng 2015) has proven to be able to identify all the closed blocks from a discrete fracture network, and the geometrical relationships between blocks can also be determined. Based on the results from 3D block-cutting analysis, Shi (2006), Fu and Ma (2014) and Fu et al. (2016) identified the removable key blocks in progressive failure process. In the study by Fu and Ma (2014), a progressive failure analysis was performed on the reconstructed rock masses to search different batches of key blocks, with each key block identified using traditional vector analysis method (Warburton 1981; Goodman and Shi 1985). They developed a force transfer algorithm to consider the interactions of the different batches of key blocks. Specifically, the out-of-balance forces of inner key blocks (the later batches of unstable blocks) are transferred to the key blocks exposed on the excavation surfaces (i.e. the first batches of unstable blocks). In this way, the calculated sliding forces of surface key blocks, which consider the mechanical effect from later batches of key blocks, are used for support design. However, such a force transfer algorithm seems to lack sufficient theoretical base. Besides, using DFN-based polyhedral modelling, Elmouttie et al. (2016) developed a novel excavation analysis method for slope design, which takes full account of the progressive failure of blocky rock mass.
By employing the 3D block-cutting method and appropriate translational failure modes in block theory (i.e. single-face sliding, double-face sliding, and lifting), Zhang et al. (2017) presented the main procedures of a progressive failure analysis, where the blocks that fail progressively were determined through geometrical judgment and kinematic analysis. However, the ‘collapsible’ blocks identified using such kind of method are, in fact, removable blocks, or rather, potential key blocks, because they may remain stable if the shear resistance on rock fracture plane is sufficiently high. Therefore, if all these removable blocks are treated as unstable key blocks, it may overestimate the failure region of rock mass and hence lead to a conservative support design.
This study is dedicated to further identification of real, unstable key blocks from removable blocks using progressive failure analysis. On this basis, the support forces required for all of identified, randomly distributed unstable blocks were calculated and the distribution characteristic of the required support force per unit area of free surface was analyzed. Using the probabilistic and reliability-based design concept, an analysis method for systematic rock bolting scheme (including the anchoring force of single bolt, bolt spacing, and anchorage length) was proposed. The results presented in this work can benefit the improvement of progressive failure analysis and support design of blocky rock mass and have practical implications for rock engineering projects.
2 Identification of Blocks that Fail Progressively
2.1 Geometric Identification of Removable Blocks from a Blocky System
When judging the removability of rock blocks, three translational failure modes assumed in block theory were considered, including free falling or lifting, single-face sliding, double-face sliding (Goodman and Shi 1985). When a surface removable block collapses, each of the contact surfaces between this block and its adjacent blocks becomes free surface, implying that the constraints imposed to adjacent blocks have been reduced. The adjacent blocks which are originally stable could become instable. In this way, the progressive failure of rock mass would occur, and the analysis procedures are as follows: (1) examining the removability of blocks located around rock mass surface (excavation surface) using removability theorem in classic block theory. The identified removable, surface blocks are regarded as the first batch of removable blocks; (2) checking the removability of newly exposed together with the previously exposed blocks after the removal of first batch of removable blocks; (3) repeat the above step until no removable blocks can be detected, with multiple batches of removable blocks obtained.
An example, originating from practical rock cavern project, is used to demonstrate the geometric identification of removable blocks that could fail progressively. A model rock cuboid was created which contains an arch-shaped cavern of interest. There are mainly four discontinuity sets in rock mass and their detailed geometrical parameters are shown in Table 1. Based on the statistical analysis of the measured discontinuity information, the discrete fracture network (DFN) or 3D discontinuity network was generated using Monte-Carlo simulation. Figure 1 presents a realization of discontinuity network from Monte-Carlo simulation. Then, the blocky rock mass model was generated using 3D block-cutting analysis method. The simulated arc-shaped cavern has a height of 30 m, a span of 20 m, and a length of 45 m with the orientation of being NE70°. After the excavation of cavern, the final model is established, as shown in Fig. 1b. There are totally 4521 fractures and 14,097 closed blocks in this model.

Results from 3D block-cutting and progressive failure analysis: a stochastically generated discontinuity network; b blocks generated using 3D block-cutting method; c and d a total of 987 identified removable blocks (shown in different viewing angles) that have potential to fail progressively; e–h show the first batch, the first two batches, the first three batches, and the first four batches of removable blocks
As illustrated in Fig. 1c, d, a total of 987 removable blocks that could progressively fail were identified through geometric judgement, where only the block gravity is considered. These removable blocks were identified in 17 batches; Fig. 1e shows the first batch of removable blocks while Fig. 1f–h illustrates the first two, first three, and first four batches of blocks, respectively. It is clear that the total number of removable blocks identified using progressive failure analysis is significantly more than that of the first batch of removable blocks located on the rock surface. In this sense, the traditional block theory which only deals with surface removable blocks could lead to noticeable safety risk. It is of note that the number of removable blocks in the first four batches approximates the total number of all removable blocks, and the remaining batches contains only a small number of removable blocks.
With regards to the geometric identification of removable blocks that could progressively fail, two issues are worth paying attention to. The first one is about the failure of blocks that have parallel faces. Theoretically, a block with parallel faces is likely to collapse if there are no faces of its adjacent blocks counteracting its translational movement. In the following, the single-face sliding model is employed as an example to address this issue. As shown in Fig. 2, KB1 is a surface removable block delimited by two discontinuity planes and could be a key block if the resisting force on the sliding face is not sufficient. Provided that the KB1 is stable and stays in position, B1 and B2, two surface blocks with parallel faces, should be considered stable as either of them is clamped by adjacent blocks via two parallel discontinuity planes that are actually somewhat rough and undulating. However, on the other hand, if KB1 collapses, B1 will become instable and fail in the form of single-face sliding, which is followed by the failure of B2 and then B3. In this way, the progressive failure of blocks with parallel faces would still occur like a chain reaction.

Removability of surface blocks with parallel faces: a B1 and B2 are stable due to the clamping effect; b B1 becomes unstable and tends to slide along a single face after KB1 collapses; c progressive failure of B2 and B3
Therefore, the removability of a surface block with parallel faces, such as B1 and B2, does not need taking into account due to the ‘clamping effect’ if the angle between its movement direction and normal vector of any of its unexposed faces other than sliding surface exceeds a pre-set value that is slightly less than but close to 90°. For example, for an assumed pre-set angle of 85° and single-face sliding mode, there is a need to consider the removability of the surface blocks B1 and B2 only if the following inequality is satisfied.
where \(\hat{s}_{i}\) represents the direction of movement when block slides along the discontinuity plane i, \(\hat{v}_{k}\) is the unit normal vector of an unexposed face k, directed into the block. For the case of double-face sliding, the formula (1) is revised to the following form:
where \(\hat{s}_{ij}\) represents the direction of movement of a block sliding along two faces i and j. The method to calculate \(\hat{s}_{i}\), \(\hat{v}_{k}\), and \(\hat{s}_{ij}\) can be found in Goodman and Shi (1985).
The second issue is that the removability and failure mode of a block need to be re-assessed if the resultant forces acting on the block changes. For example, for a blocky rock system reinforced by rock bolt system, if the anchoring force varies, the direction and magnitude of the resultant force (i.e. the combination of the support force and other active forces such as gravity) will change, which leads to the necessity of re-examining the removability and failure mode of reinforced blocks.
2.2 Key Blocks Mechanically Identified from the Removable Blocks
The above-mentioned geometrical removability analysis that considers three possible sliding modes only allows the identification of removable blocks (i.e. potential key blocks) that may progressively fail. Herein, mechanical analysis methods are presented for further identifying key blocks from removable blocks. Key blocks can be identified by estimating the stability factor and net sliding force for each removable block using the equation by Warburton (1981) and the formula by Goodman and Shi (1985).
For the identified removable blocks shown in Fig. 1, mechanical analysis is performed to further judge the key blocks that fail progressively. On the basis of the pseudo-code presented in Zhang et al (2017) for the geometrical identification of removable blocks, the following pseudo-code is added and implemented for the mechanical identification of key blocks.

When the friction coefficient of discontinuity (μ) is assumed to be 0.5, 1.0, and 1.5, a total of 942, 837, and 445 key blocks are obtained, respectively, as shown in Fig. 3. As the rock discontinuity has relatively large dip angle (see Table 1), the total number of key blocks identified at μ = 0.5 is close to that of removable blocks identified from geometrical analysis (i.e. 987 removable blocks as shown in Fig. 1); as the μ increases, the key blocks that progressively fail become less. In terms of two sidewalls of the cavern, the unstable, double-face sliding blocks on the south sidewall (i.e. left sidewall in Fig. 3) with a relatively high stability factor become stable when the μ value is increased to 1.0. When the μ value is increased further to 1.5, the previously unstable, single-face sliding blocks on the north sidewall (i.e. right sidewall in Fig. 3) become stable, and in this situation, the unstable key blocks are only those single-face sliding blocks located on south sidewall. Since this cavern case considers four discontinuity sets, the discontinuity intersection configurations related to the generation of single-face sliding blocks differ between south sidewall and north sidewall. Besides, due to the orientation of discontinuities, more large key blocks appears on the roof near south sidewall whereas less key blocks appear on the roof close to north sidewall.

The identified key blocks that fail progressively using mechanical analysis: a a total of 942 key blocks are obtained when the friction coefficient of discontinuity plane is 0.5; b a total of 837 key blocks for the friction coefficient of 1.0; c a total of 445 key blocks for the friction coefficient of 1.5
3 Rock-Bolt Support to Prevent Progressive Failure of Blocks
A general issue encountered in engineering practice is how to make a reasonable stability analysis of blocks exposed on excavation face and to develop a reliable support scheme before implementing rock excavations. Conventionally, rock support design is based on the classification of rock masses using classification systems such as RMR and Q system (Bieniawski 1973; Barton et al. 1974). The Q system considers factors including RQD index, joint set number, joint roughness, degree of alternation or filling along the weakest joint, and other factors related to stress circumstance. In the Chinese standard for engineering rock mass classification (The National Standard Compilation Group of the PRC 2015), rock masses are classified by considering the strength of intact rock blocks and the status of rock discontinuities. On this basis, design and support recommendations are made for rock masses of different levels of quality. In general, the support design based on rock mass classification does not take into account the effect that the discontinuity orientation (or attitude) has on the stability of rock masses. For example, if the sidewall and cavern roof, within a certain cavern section, present discontinuities of similar amount and scale, the same support measures and parameters will be suggested for them based on the rock classification method. However, it ignores the possibility that the same discontinuity sets lead to the difference in the number and scale of unstable key blocks presented on sidewall and cavern roof, that is, different support design parameters may need to be employed for side wall and roof of the cavern.
The progressive failure analysis method comprehensively considers the characteristics of rock discontinuities (e.g. density, spacing, and orientation) and their intersections with free or excavation surfaces; in particular, it highlights that the stability of shallow-buried, hard rock masses is controlled by the blocks delimited by discontinuities. Thus, this analysis method is expected to provide a more reasonable basis for developing rock support scheme. In what follows, the anchoring force that is required to support unstable, randomly distributed key blocks is analyzed; a new approach to assess the spatial distribution of the required anchoring force is proposed, with the probability distribution of the anchoring force presented. On this basis, the method for designing the anchoring force of individual bolt and the bolt spacing is proposed. Finally, a brief discussion is made on how to determine the required length of rock bolt according to the embedment depth of key blocks.
3.1 Calculation of the Anchoring Force for Key Blocks
The interaction between rock bolts and fractured rock masses is complicated. In terms of bolted rock joints, Pellet and Egger (1996) proposed that the strengthening effect of a bolt can be divided into two terms: an additional cohesion, related to the parallel component of the force to the joint, and an enhanced confining stress, connected with the normal component of the force in the bolt. Both terms depend on bolt inclination, strength of the rock-bolt-grout system as well as friction angle of joints. In this study, the support force provided by the bolt is treated as the tensile resistance acting on rock blocks along the axial direction of the rock bolt. This is a simplified way to treat the anchoring force, and above-mentioned influencing factors as well as the bolt deformation process are not taken into account.
An estimation of the anchoring force required to support each key block is the basis for analyzing the spatial distribution of anchoring force on the excavation surface and for conducting the support design. As unstable blocks differ in spatial location, dimension, shape, and failure mode, the required anchoring force for each block is different. An analysis of anchoring force follows two steps: (1) Determining the direction of the anchoring force. The rock bolts are generally designed to be perpendicular to free or excavation surface. Therefore, the direction of the anchoring force can be pre-determined according to the attitude or orientation of free surface; (2) Calculation of the anchoring force required for each block. The anchoring force is increased stepwise using a pre-set small increment according to block weight; then, the resultant force is computed by adding up the gravity and the incremental anchoring force, and the failure mode and stability factor of reinforced block is re-assessed using the formula by Goodman and Shi (1985). In this way, when the incremental anchoring force, at some points, leads to the desired stability factor, it is considered the required anchoring force. The process can be fulfilled using the following pseudo-code.

For each key block, its required anchoring force is calculated without taking account of which batch this block belongs to. By this way, once the required anchoring forces for all key blocks are attained, it is considered that the stability of whole rock mass is ensured. This concept is different from classic block theory which deals with only surface (daylighting) key blocks and believes that the whole rock mass can be stable as long as the surface (daylighting) key blocks are reinforced. As the required anchoring forces of all key blocks that progressively fail need to be considered for the support design, the latent risk arising from considering only the surface key blocks in the traditional key block method can be avoided. It is worth mentioning that the required anchoring forces of inner key blocks are estimated without considering the constraint effect from the reinforced surface or outer key blocks; this is for the purpose of being on the safe side and is consistent with the general goal of using the progressive failure analysis to better ensure engineering safety.
Following the steps discussed above, the required anchoring forces for the identified key blocks presented in Fig. 3 were calculated under the assumption that the desired stability factor is 1.1. A statistical analysis of the anchoring forces was performed and the results are shown in Fig. 4, where the number of blocks is plotted against their required anchoring force. It is seen that the required anchoring force follows a negative exponential distribution. As the friction coefficient increases, the anchoring force for a given block decreases and the total number of blocks that need to be supported decreases, indicating that the identified block using removability analysis are merely potential key blocks which may become stable as the shearing resistance on the sliding plane increases.

The distribution of required anchoring force of blocks
3.2 Required Anchoring Force Per Unit Area of Excavation Surface
The rock blocks delimited by discontinuity network are randomly distributed due to the stochastic nature of rock discontinuities. Consequently, the dimension, shape, and spatial locations of unstable key blocks have stochastic nature, as indicated in Fig. 5. The spatial distribution of key blocks is heterogeneous; for example, densely distributed key blocks with large dimension appear in some parts of excavation surface whereas sparse key blocks present in other parts. In general, higher supporting force is required for those parts of rock mass with densely distributed and large key blocks. Nevertheless, there is no clear knowledge of all these information before excavation. Thus, there is a need to conduct multiple stochastic simulations for the purpose of obtaining an overall statistical understanding of the spatial distribution of key blocks from the analysis of multiple stochastically generated rock mass samples, and the follow-up support design also needs to be based on the obtained statistical understanding.

The identified key blocks from progressive failure analysis using different stochastically generated samples of discontinuity network: a–d correspond to sample 1 to sample 4
In terms of the design, if the discontinuity condition across a free surface is considered as roughly uniform before the excavation, systematic rock bolting is normally applied to control the overall deformation and to ensure the stability of key blocks. After the excavation, spot bolting scheme is used to reinforce large key blocks as necessary. Besides, fiber reinforced shotcrete is usually used to support those small key blocks that are not reinforced by the above two bolting schemes.
For a systematic rock bolting scheme, the main design parameters include bolt length, direction of the anchoring force, bolt spacing, and the anchoring force of individual bolt. Since a preliminary design scheme is needed before the rock excavation, it is necessary to perform multiple stochastic simulations, as afore-mentioned, to obtain a statistical understanding of the geometry and spatial distribution of key blocks as well as the required anchoring force to determine relevant design parameters. Therefore, it is appropriate to conduct the rock bolting design using a probabilistic approach that assesses the reliability of the reinforced blocky rock system.
For a systematic rock bolting scheme, the design of the support force of individual bolt and the bolt spacing relies on reasonable analysis of the required anchoring force per unit free surface area, referred as to RAFPUA. Herein, the RAFPUA is obtained by means of apportioning the required anchoring force of each key block according to its projected area on the free surface. It implies that a domain on the free surface that can accommodate more key block projections has a higher RAFPUA. The RAFPUA is determined following four steps:
-
1.
Analyzing the projection region of a block on the free surface. As illustrated in Fig. 6, each face of a block of arbitrary 3D morphology can be considered as a closed loop. The normal vector of the loop points to the inside of the block, and the vertex arrangement order of the loop and the normal vector pointing are by the right-hand rule (Lin1987; Zhang 2015). The projection of each face of the block on the free surface is also a closed loop, as shown in Fig. 7a.
-
2.
The whole area of the free surface was segmented into regular lattices in its local coordinate system, and an analysis is made of whether the center of a lattice lies within the projected area of any loop (face) of a key block, as shown in Fig. 6b. If so, the entire lattice is taken to be within the projected area of this block. It is of note that the method employed herein only deals with the judgment on whether the lattice’s center lies within any projected loop of the block, which can simplify the analysis and programming. It can be imaged that the analysis results are more accurate as the size of lattice gets smaller.
-
3.
Counting the total number of lattices that are incorporated into the projected area of a block and then evenly apportioning the required anchoring force of the block to all these lattices. This is based on an assumption that the required anchoring force of a key block is uniformly distributed over its projected area on free surface. That is, no matter which position of the block the support force is applied to, the same reinforcement can be achieved. In engineering practice, the employed anchoring force of individual bolt is approximately homogenous and the bolts are evenly spaced on the free surface. Thus, such an assumption is consistent with practical design.
-
4.
Calculating the anchoring force of each lattice allocated from the key blocks. The required anchoring force of each key block is evenly apportioned to its projected lattices using the above three-step analysis. If a lattice lies in the projected area of multiple blocks, its anchoring force is the sum of the apportioned forces from multiple blocks. In this way, the spatial distribution of RAFPUA, represented in terms of the anchoring force of each lattice allocated from the key blocks, can be obtained.

Schematic representation of the projection of block to a given free surface of rock masses: a the projected area of block on the free surface; b Partitioning the free surface into lattices and analyzing whether a lattice lies within the projected area of a block

The spatial distributions of identified key blocks and RAFPUA: a and c identified key blocks demonstrated from different perspective; b and d the distribution of RAFPUA from different perspective
The spatial distribution of RAFPUA for the sample 1 shown in Fig. 5 is presented in Fig. 7, which shows that the distribution of RAFPUA is directly related to the spatial positions of key blocks. It is seen that higher anchoring force per unit free surface area occurs in the places where key blocks are concentrated. In other words, in the common projected area of multiple key blocks, the value of the RAFPUA is higher (the change of color from blue to red indicates the increase of RAFPUA). Presuming that each grid is supported by a bolt installed in its center, the Fig. 7, in fact, can reflect which grid requires higher anchoring force and can provide basis for a safe design that ensures the stability of most of the reinforced grids (i.e. failure probability is below a desired design value).
3.3 Anchoring Force of Individual Bolt and Bolt Spacing
Based on the distribution of the required anchoring force of each grid, the bolt spacing and the anchoring force of individual bolt employed to ensure a desired reliability value can be determined. As shown in Fig. 7, as the key blocks located on the cavern roof and side walls significantly differ in the embedment depth and size, it is necessary to consider the cavern roof and sidewalls separately. In terms of south and north sidewalls, when the friction coefficient of discontinuity is 0.5, the probability distributions of RAFPUA for six different cases of discontinuity network (i.e. six realizations of discontinuity network or six discontinuity samples generated from stochastic modelling) are presented in Fig. 8.

The probability distribution of RAFPUA: a south sidewall; b north sidewall
For each stochastically generated blocky rock mass sample, the mean and standard deviation of the RAFPUA can be estimated for the north and south sidewall. On this basis, a statistical analysis of the estimated mean and standard deviation of the RAFPUA of six different samples for each sidewall can be conducted to further derive their overall statistical parameter values including the mean, standard deviation, and coefficient of variation (the ratio of the standard deviation to the mean), as indicated in Table 2. It is seen that the mean value of RAFPUA shows a relatively small variation among different samples, with the coefficient of variation of 33.1% for the south side wall and of 37.3% for the north side wall.
The probability distributions and accumulated probability of the estimated mean of RAFPUA for six samples, presented in Fig. 8, clearly indicate that the larger the magnitude of RAFPUA is, the smaller its probability value is. Therefore, it is reasonable to describe the probability distribution of RAFPUA using a negative exponential distribution. After obtaining the overall mean value of the RAFPUA from six samples, the probability density function for the RAFPUA can be described using the following equation.
where Er is the overall mean value of the RAFPUA derived from six stochastic discontinuity samples. The probability for the RAFPUA to be greater than x is
For the south sidewall, when the employed RAFPUA is greater than 4, 5, and 6 kN/m2, the probability of the block failure is 4.0%, 1.8%, and 0.8%, respectively. Therefore, if the acceptable probability of failure is less than 1.0%, the RAFPUA should be greater than 6 kN/m2. In other words, if a bolt spacing of 1.0 × 1.0 m is adopted, the designed anchoring force of each bolt should be greater than 6 kN/m2; if a bolt spacing of 2.0 × 2.0 m is adopted, the anchoring force of each bolt should be greater than 24 kN/m2.
3.4 Anchorage Length
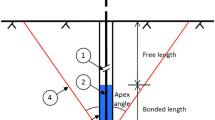
Each corner of the key block lies at certain depth behind the free (exposed) surface of rock masses. The depth of the corner furthest from the free surface is herein defined as the ‘embedment depth’ of the block. Then, under the premise of ensuring a certain reliability or failure probability, the anchorage length can be determined based on the embedment depth of the block (Zhang et al. 2017). Since the embedment depth of the block can be directly obtained from the progressive failure analysis, the problem of determining the length of the anchor support can be solved in a relatively straightforward way.
4 Conclusions
Using the 3D block-cutting method, Zhang et al (2017) presented the main procedure of progressive failure analysis of blocky rock system. However, their study is based on the use of geometric judgment and kinematics analysis to identify the removable blocks which are the potential unstable block rather than key blocks, thereby overestimating the range and quantity of real unstable blocks. This study conducted a realistic progressive failure analysis of blocky rock system by means of the geometric-mechanical identification of key blocks. On this basis, the anchoring force required for randomly distributed key blocks was calculated, and a new method was proposed for analyzing the required anchoring force per unit area of the free surface (RAFPUA) of rock mass along with its spatial distribution. Furthermore, based on the concept of reliability design, the systematic rock bolting scheme for preventing the progressive failure of blocky rock mass is presented and discussed. The following conclusions can be drawn.
-
1.
The static equilibrium analysis is essential for identifying the key blocks from the removable blocks when implementing a progressive failure analysis of blocky rock system.
-
2.
The required anchorage force of each key block can be determined via two main steps: first, increasing the anchoring force applied to each key block incrementally and calculating the resultant force of active forces such as anchoring force and gravity; then, assessing the failure mode and stability factor for each block. When the anchoring force is increased to a value that leads to the desired stability factor, the required anchoring force for this block is obtained.
-
3.
A new method for analyzing the required anchoring force per unit area of excavation surface (RAFPUA) is proposed. Using this method, the distribution of RAFPUA, represented by the anchoring force allocated to each lattice of the excavation surface, can be obtained. On this basis and using the concept of reliability design, an approach to determine the anchoring force of individual rock bolt and the bolt spacing is proposed. Such approach, together with the analysis method of the anchorage length, forms a complete methodology for designing systematic rock bolting scheme aiming to prevent the progressive failure of blocky rock masses.
-
4.
Classic block theory only deals with key blocks located on the exposed surface, and stability of these surface key blocks is studied one by one. A progressive failure analysis can obtain all unstable key blocks at once and fully considers the geometric characteristic of discontinuities such as their spacing and extension. In this sense, the progressive failure analysis method is considered as an important development of classic block theory
-
5.
The method of using the engineering rock classification system (e.g. Q system) to determine the design parameters for rock bolting system cannot take account of the difference in the geometry and distribution of key blocks on different exposed surfaces; this difference is caused by the varying directional combination between the discontinuities and open surfaces. The results presented in this study can serve as important supplement to the design method that is based on engineering rock classification.
It is worth mentioning that we developed a 3D block-cutting analysis program that enables the identification of over 200,000 closed blocks from any given DFN with arbitrary configuration. This program runs very smoothly and robustly. The results and methods presented in this study, with respect to the progressive failure analysis, can provide new means for assessing the stability of blocky rock system and conducting rock support design, and they have been successfully applied in the underground water-sealed storage cavern projects.
References
Barton N, Lien R, Lunde J (1974) Engineering classification of rock masses for the design of tunnel support. Rock Mech 6:189–236
Bieniawski ZT (1973) Engineering classification of jointed rock masses. Trans s Afr Inst Civ Eng 15:335–344
Elmouttie M, Poropat G, Krähenbühl G (2010) Polyhedral modelling of rock mass structure. Int J Rock Mech Min Sci 47(4):544–552
Elmouttie M, Krähenbühl G, Soliman A (2016) A new excavation analysis method for slope design using discrete fracture network based polyhedral modelling. Comput Geotech 76:93–104
Fu GY, Ma GW (2014) Extended key block analysis for support design of blocky rock mass. Tunn Undergr Sp Technol 41:1–13
Fu GY, Ma GW, Qu XL, Huang D (2016) Stochastic analysis of progressive failure of fractured rock masses containing non-persistent joint sets using key block analysis. Tunn Undergr Space Technol 51:258–269
Goodman RE, Shi GH (1985) Block theory and its application to rock engineering. Prentice-Hall Inc, Englewood Cliffs, New Jersey
Hatzor Y, Feintuch A (2005) The joint intersection probability. Int J Rock Mech Min Sci 42(4):531–541
Jing L (2000) Block system construction for three-dimensional discrete element models of fractured rocks. Int J Rock Mech Min Sci 37(4):645–659
Lin D, Fairhurst C (1988) Static analysis of the stability of three-dimensional blocky systems around excavations in rock. Int J Rock Mech Min Sci 25(3):139–147
Lin D, Fairhurst C, Starfield AM (1987) Geometrical identification of three-dimensional rock block systems using topological techniques. Int J Rock Mech Min Sci 24(6):331–338
Noroozi M, Jalali SE, Yarahmadi-Bafghi AR (2011) 3D key-group method for slope stability analysis. Int J Numer Anal Methods Geomech
Pellet F, Egger P (1996) Analytical model for the mechanical behaviour of bolted rock joints subjected to shearing. Rock Mech Rock Eng 29(2):73–97
Shapiro A, Delport JL (1991) Statistical analysis of jointed rock data. Int J Rock Mech Min Sci 28(5):375–382
Shi GH (2006) Producing joint polygons, cutting joint blocks and finding key blocks from general free surfaces. Chin J Rock Mech Eng 25(11):2161–2170
Shi GH, Goodman RE (1989) The key blocks of unrolled joint traces in developed maps of tunnel walls. Int J Numer Anal Methods Geomech 13:131–158
The National Standards Compilation Group of the People’s Republic of China (2015) Standard for Engineering Classification of Rock Masses (GB/T50218-2014). China Planning Press, Beijing (in Chinese)
Warburton PM (1981) Vector stability analysis of an arbitrary polyhedral rock block with any number of free faces. Int J Rock Mech Min Sci Geomech Abstr 18(5):415–427
Wibowo JL (1997) Consideration of secondary blocks in key-block analysis. Int J Rock Mech Min Sci 34:3–4 (paper No. 333)
Yarahmadi-Bafghi AR, Verdel T (2003) The key-group method. Int J Numer Anal Met Geomech 27(6):495–511
Zhang QH (2015) Advances in three-dimensional block cutting analysis and its applications. Comput Geotech 63:26–32
Zhang ZX, Lei QH (2013) Object-oriented modeling for three-dimensional multi-block systems. Comput Geotech 48:208–227
Zhang QH, Ding XL, Wu AQ (2017) A comparison of the application of block theory and 3D block-cutting analysis. Int J Rock Mech Min Sci 99:39–49
Zheng Y, Xia L, Yu Q (2015) A method for identifying three-dimensional rock blocks formed by curved fractures. Comput Geotech 65:1–11
Acknowledgements
This research was sponsored by the General Program of National Natural Science Foundation of China (Grant Nos. 52079129, 41572286, and 41972298).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Zhang, QH., Liu, QB., Wang, SH. et al. Progressive Failure of Blocky Rock System: Geometrical–Mechanical Identification and Rock-Bolt Support. Rock Mech Rock Eng 55, 1649–1662 (2022). https://doi.org/10.1007/s00603-021-02752-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00603-021-02752-0