
Abstract
This study presents a new three-dimensional (3D) network modelling method for fractures collected in a large sampling window, in which the determination of fracture disc diameter is the critical step. To derive the diameter, the disc radius of the fractures of the investigated exposed rock surface is initially obtained based on the collected trace lengths. Then, the disc radius of the fractures in 3D space is deduced. The determination of the density and orientation of fractures is also included in the study. Subsequently, the 3D fracture networks for each fracture set are generated based on the derived diameter, density and orientation. To verify the rationality of the method, the rock masses downstream of the sluice gate of Datengxia hydropower station are selected as study objects, and a plane with identical orientation to the exposed rock surface is intersected by the network, thereby obtaining the fracture traces in the plane. The statistical characteristics of fracture traces in the plane and those of the exposed rock surface are highly similar. Thus, the proposed method is feasible.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In the research field of rock masses, it has been widely noticed that discontinuities, including structural fractures, rock beddings and soft layers, affect the mechanical properties of rock masses (Hudson and Harrison 1997; Grenon and Hadjigeorgiou 2003; Zhang et al. 2019a, b). Thus, the distribution characteristics of discontinuities in three-dimensional (3D) space should be determined to ensure the safety of engineering structures, such as reservoir dams, tunnels and nuclear stations. As a type of discontinuity, structural fractures are characterised by huge quantities and high uncertainties, which pose immense challenges to the analysis of fractured rock masses. Determining the distribution characteristics of discontinuities within rock masses is difficult because only exposed discontinuities can be observed and surveyed. In recent decades, 3D fracture network modelling has been utilised to overcome the aforementioned difficulties by generating 3D fractures in rock masses based on stochastic mathematics.
Given the importance of 3D fracture network modelling in rock engineering, a number of researchers have been working on the theories on 3D fracture network. Robertson (1970) summarised from nearly 9000 fractures investigated from the field that strike length and dip length of fractures were nearly equal. In the current work, fractures are assumed to be round discs during 3D fracture network modelling (Kulatilake and Wu 1986). Shanley and Mahtab (1975) proposed an analysis method of clusters for fractures collected from the field. Terzaghi (1965), Priest (1985) and Wathugala et al. (1990) introduced different approaches to mitigate the sampling bias of fracture orientations. The size, orientation and density of discontinuities are essential parameters in 3D fracture network modelling. Priest and Hudson (1981), Kulatilake and Wu (1984, 1986), Priest (1993) and Oda (1982) presented different calculation methods for mean trace length, 3D size and density of fractures in 3D fracture networks. Based on these theoretical studies, 3D fracture network modelling has been widely used in rock engineering analysis and applied to many practical engineering projects (Cheng et al. 2004; Bauer and Toth 2017; Vazaios et al. 2017).
As a key component of 3D fracture network modelling, fracture size is emphasised in this study. As previously mentioned, it is usually assumed that the shape of a fracture in 3D space is a round disc, and its diameter is considered to be the fracture size. The probability density function (PDF) of discontinuity diameter is usually and indirectly derived based on the trace length data collected from the field. Warburton (1980) presented the mathematical relationship between trace length and fracture size. Subsequently, many methods have been suggested to derive the PDF of diameter based on investigated trace lengths. Villaescusa and Brown (1992) proposed a parametric model for discontinuity diameter and estimated its parameters through maximum likelihood estimation. Zhang and Einstein (2000) extended the approach suggested by Villaescusa and Brown and inferred the discontinuity diameter from corrected trace lengths collected from circular windows based on the general stereological relationship between trace length and discontinuity diameter. Tonon and Chen (2007, 2010) derived the numerical solutions for the PDF of fracture diameter based on different distribution types of trace length with Santalò closed-form integral solution and subsequently presented the conditions for the existence, uniqueness and correctness of fracture diameter using Warburton’s fracture model as flat circular discs.
Most of the current 3D fracture network modelling methods are based on manually measured small-window fracture data (Han et al. 2016). Thus, these network modelling methods necessitate censoring deviation, which includes cumbersome and time-consuming procedures (Zhang and Einstein 2000; Palleske et al. 2013). Although these theories are sometimes applied to large-window data, these complex operations are conducted as usual (Lambert et al. 2012). In addition, modelling outcomes are derived from obscure calculus analytic expressions, which hinder extensive applications amongst engineers (Fouche and Diebolt 2004). Considering the aforementioned limitations, we present a new method for fracture data collected in large sampling windows, with overwhelming majority of fractures with both ends visible. Methods for large-window collected fractures are becoming essential because current approaches, such as 3D laser scanning and close-range digital photogrammetry, are progressively applied in practical engineering projects to collect fractures in large areas (Ma et al. 2017; Morales et al. 2017). Our method can operate in a simple and rapid manner because of the collected data in a large sampling window characterised by a great deal of complete fracture geometric information and absence of censoring deviation. In addition, our method attempts to generate random numbers of fracture geometric factors using simple formulas to make operations relatively simple and intuitive.
Our method for 3D fracture network modelling conforms to the practical use of large sampling windows, in which the fracture disc diameter is emphasised. Based on the stochastic characteristic of the geometric parameters of fracture discs, first, we deduce the radii of the discs that intersect the exposed rock surface using the trace length data collected in the field. Subsequently, the disc radius of the fractures in 3D space is derived (Sect. 2.1).In addition, the density and orientation of fractures are determined (Sect. 2.2). The rock masses lying downstream of the sluice gate of Datengxia Hydropower Station are selected as the study object to validate the suggested method. Finally, the corresponding 3D fracture networks are generated (Sect. 4) to prove the rationality and precision of the proposed method.
2 Modelling Method
Fracture diameter, orientation and density are essential geometric parameters in the process of 3D fracture network modelling. This section elaborates the determination of these parameters, particularly the fracture disc diameter (Sect. 2.1).
2.1 Determination of Fracture Disc Diameter
The stochastic mathematical method to determine the PDF of fracture disc diameter is characterised by generating random numbers of geometric parameters based on trace length data collected in the field. The process of the method is summarised in Fig. 1, and the procedures are expressed as follows:

Flowchart of the process of determination of fracture disc diameter
- 1.
We assume that a fracture with disc diameter 2r intersects the exposed rock surface into a fracture trace with length of 2ch. Variable u represents the distance between the fracture disc centre and midpoint of fracture trace (Fig. 2).
Fig. 2 
Geometric parameters of a typical fracture disc

The fracture discs are randomly located in 3D space, indicating that fracture discs intersect the exposed rock surface at random places, that is, u uniformly varies between 0 and r. Thus, u/r follows U(0,1). We can generate n random numbers for u/r that follows a uniform distribution.
- 2.
Determination of mean of r2 [E(r2)].
Step (1) indicates that u/r ~ U(0,1), that is, E(u/r) = 1/2, D(u/r) = 1/12. Subsequently, E(ch2/r2) can be determined using the following equations:
Although r2 = ch2 + u2, we still assume that ch2 and r2 are independent because the dependence between ch2 and r2 is severely mitigated by the large amount of discrete data of r2. Thus, we assume that
To validate this conclusion, 3D fracture networks with varied fracture disc diameter distributions are generated. Each network has 50,000 fractures. A space with dimensions of 50 m × 40 m × 40 m is used for each fracture network. Fracture orientations are rendered to conform to the empirical distributions of the field data, which are introduced in Sect. 3.2. The results of E(r2) and E(ch2) in Table 1 prove the rationality of Eq. (2). Therefore, E(r2) can be deduced from the trace length data collected in the field.
It should be noticed that E(ch2) needs to be determined based on the corrected trace lengths. As previously mentioned, however, both ends of most large-window collected fractures are visible, implying that trace length bias can be ignored and the correction for trace lengths can be omitted.
- 3.
Determination of variance of r2 [D(r2)].
We assume that r2 may follow normal, lognormal, gamma and negative exponential distributions, which are the most commonly used distribution types. The feasibility of the assumed distributions is discussed in Sect. 6.
For any distribution type, D(r2) is initially and primarily designated. The random numbers of r2 can be generated in combination with E(r2) [determined in Step (2)]. The random numbers of 1 − (u/r)2 (i.e. ch2/r2) can be generated based on the random numbers of u/r generated in Step (1). Then, ch2/r2 multiplied by r2 equals the random numbers of ch2. D(r2) is adjusted until the variance of the generated random numbers of ch2 corresponds to D (ch2) in the field. The final D(r2) is the variance of the radius of 3D fracture discs.
E(r2) and D(r2) are the parameters for normal distribution. For gamma distribution, the parameters include shape parameter k and scale parameter θ. For logarithmic normal distribution, the parameters include identical location parameter μ and scale parameter σ. For negative exponential distribution, the parameter is rate parameter λ. These parameters can be deduced from the mean and standard deviation. Therefore, the method is also applicable to gamma, logarithmic normal and negative exponential distributions.
Notably, small fractures in the field might not be collected, thereby affecting the values of E(ch2) and D(ch2) in the field. However, the discrepancy caused by that truncation is relatively small and thus acceptable in engineering practice, as discussed in Sect. 6.
A value of D(r2) can be determined for each of the three distributions mentioned in Steps (2) and (3). However, a single value must be selected from the four potential values of D(r2) (i.e. to select the PDF of r2). The selection processes are discussed in Step (4).
- 4.
Determination of PDF of r2 and random numbers of r.
For each potential value of D(r2), the corresponding series of simulated ch (i.e. square root of the random numbers of ch2) can be determined. Chi-square test, which is widely utilised in multiple areas (Mantel 1963; Bryant and Satorra 2012) and not discussed in detail in the present study, is used to determine the most appropriate distribution of r2 by comparing the data of simulated ch and ch in the field.
The random numbers of r2 can be generated based on the mean, variance and distribution type of r2. The square roots of each number form a series of random numbers of r to be used in subsequent deductions.
- 5.
Determination of PDF of r′ in 3D space.
r derived in Step (4) represents the frequencies of fractures of different disc radii that intersect the exposed rock surface; these frequencies differ from those in 3D space. For example, a large fracture disc has greater probability to intersect the exposed rock surface than a small fracture disc. Consequently, the number of large fractures is less and the number of small fractures is more in 3D space than those that intersect the exposed rock surface. Therefore, the distribution of fracture disc radii in 3D space should be further deduced according to r, as discussed in the following paragraph.
We assume that a fracture set in 3D space has a radius of r and an intersection angle of θ relative to the exposed rock surface. The probability f that the fracture can be collected on the exposed rock surface is given by Eq. (3). The percentage P that fractures with radius r located between a and b can be collected is expressed by Eq. (4). Subsequently, Eq. (5) is used to determine the number of fractures n′ab with a radius between a and b in 3D space, which is expressed as follows:
where nab is the number of fractures with a radius between a and b that intersect with the exposed rock surface, and L is the height of 3D space that accommodates the fractures.
To obtain the data on fracture disc radii in 3D space, the random numbers of r are divided equidistantly into a specified number (marked as X) of intervals, where a and b are the lower and upper limits of each interval, respectively. A large X (i.e. a small value of b − a) is recommended to improve the calculation precision. For any interval, nab can be obtained from the random numbers of r, and n′ab can be deduced from nab with Eq. (5). Consequently, n′ab random numbers are generated for each interval, and the simulated radius of fracture discs in 3D space (i.e. r′) is generated by combining the random numbers of all intervals. The final PDF of r′ is determined with Chi-square test for population distribution.
These procedures for fracture size generation are completely new and characterised by random number production based on some simple formulas. This type of data and processing method avoids complex procedures, such as fracture trace censor correction. Therefore, the data and the proposed method are simpler and faster than most published methods.
2.2 Fracture Orientation and Density
Apart from the diameter of fracture discs, fracture orientation and density are also needed to generate the 3D fracture network.
Although fracture orientations in the field are collected as samples from that in 3D space, the frequency of fractures in 3D space may differ from that collected in the field (Terzaghi 1965). The probability that fractures with small intersection angles between the discs and exposed rock surface can be collected in the field is smaller than those fractures with large angles. Therefore, the ratios of the fractures with small intersection angles should be increased (or the ratios with large angles should be decreased) to determine the 3D fracture ratios compared with the ratios for different orientations of 2D fracture traces. A frequency correction of the orientation must be rendered before the orientation data are generated.
In the present study, for fractures that intersect the exposed rock surface at an average intersection angle of α, the frequency P1 of fractures in the field (i.e. fractures that intersect the exposed rock surface) is expressed by Eq. (6). Equation (7) is used to correct the frequency of fractures with different orientations:
where n is the total number of fractures in the 3D fracture network, and Nα and N′α are the number of fractures that intersect the exposed rock surface at an average intersection angle of α collected in the field and in the 3D fracture network, respectively. Subsequently, the frequency P2 of fractures in the 3D fracture network is expressed by Eq. (8) as follows:
The trial method is used to determine the fracture density. In particular, an arbitrary density is designated to determine the number n of fractures in 3D space. Under the assumption that fracture planes are randomly distributed or follow Poisson distribution, a 3D fracture network can be generated by combining the aforementioned fracture disc radii, orientations and density. Then, a plane with identical orientation to the exposed rock surface is intersected by the 3D fracture network. The intersection line segments can be deemed as virtual fracture traces, and the number N′ of line segments (virtual fracture traces) in the plane can be obtained. The intersection area between the plane and fracture network is different from that of the fracture collection area. Thus, the area difference should be considered for n (i.e. fracture density), and Eq. (9) is proposed to guarantee the consistency of the ratio of fracture quantity to the area of investigation and in the field.
where N is the number of fractures collected in the field, A the area for fracture collection in the field (Fig. 5), and A′ the intersection area between the aforementioned plane and fracture network, which depends on the size of the 3D fracture network.
In practice, the fracture number n (fracture density) can be determined through the trial method. Different values of N′ can be obtained when n is varied. When N′ meets Eq. (9), the corresponding value of n is the final density to be determined.
The aforementioned contents confirm the crucial fracture geometric factors for network modelling, including size, orientation and density. Subsequently, we can generate n random numbers for fracture disc diameters and orientations following Eqs. (5) and (8), respectively. In addition, fractures are located for network generation. The conventional disposition assumes that fracture disc centres follow a homogeneous (Poisson) model (Billaux et al. 1989). Therefore, n random values are stochastically produced along x, y and z directions and combined to n fracture centre coordinates. Subsequently, Monte Carlo simulation is applied to synthesise the aforementioned random numbers. For each simulation, numbers of a coordinate point, fracture size diameter and orientation are stochastically taken and combined as geometric information of a fracture. n repetitions of the operations result in geometric information on n fractures, which can be regarded as the 3D fracture network eventually.
Considering all the aforementioned procedures, we believe that our method is simple and rapid for 3D fracture network generation. Our method saves time from complex operations of conventional methods and is easy and convenient to extend to practical engineering projects.
3 Case Study
The rock masses lying downstream of the sluice gate of Datengxia hydropower station are selected as the study object to validate the proposed method, which is introduced in Sects. 3.1 and 3.2. Subsequently, the processes mentioned in Sect. 2 are executed, and the corresponding 3D fracture networks are generated (Sect. 4).
3.1 Study Area
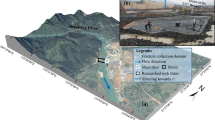
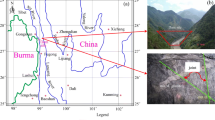
The study area is located at the Qianjiang part of Zhujiang River basin in Guiping City, Guangxi Province, China. Datengxia hydropower station is being constructed in this area (Fig. 3). The main dam is a concrete gravity dam with a projected length of 1343.098 m and a maximum height of 80.01 m. The water level elevation of the storage is designed to be 61.00 m, and the corresponding storage capacity is 2.813 billion m3.

Geographic location and general structure of Datengxia hydropower station
The main dam is located at the transitional zone between mountainous areas in the upper reaches and Middle-Guangxi Basin in the lower reaches. In the upper reaches, the elevation is approximately 300–500 m and the valley along the Qianjiang River is V-shaped. In the lower reaches, the elevation ranges from 60 to 130 m and the valley along the Qianjiang River is U-shaped.
After the completion of the reservoir, the sluice gate of the dam will be subjected to huge water pressure, which may result in failure. Therefore, the rock masses related to the sluice gate should be focused on. The rock masses in the area are characterised by soft layers with the same orientation as the gentle-angled rock surface. Field investigation shows that all of the soft layers dip downstream. The soft layers have low strength and may form the entry point of the failure plane under high water pressure.
Faults are found around the sluice gate. Most of these faults are small with crushed zones less than 1 m in width and with steep dip angles. A large-scale fault (F216 in Fig. 4) is found beneath the sluice gate. These faults intersect the dam axis at a relatively large angle, which implies that they are not likely to be the exit points of the failure plane.

Structural geological graph of rock masses beneath the sluice gate
According to field investigation, the rock masses beneath the sluice gate are particularly fractured with most fractures steep-angled (Fig. 4). Most fractures intersect the dam axis at a relatively large angle, and some of them are perpendicular, similar to the aforementioned faults. Nevertheless, many fractures lying in sections #28 and #29 are nearly parallel to the dam axis (Fig. 4). These fractures are expected to form the exit point of the failure plane under high water pressure. Therefore, the rock masses lying in the lower reaches of section #28 are taken as the study object. When the reservoir is completed, failure may occur along the failure plane combined by the steep-angled fractures and gentle-angled soft layers under extremely high water pressure.
The rock masses in section #28 are characterised by limestone of Nagaolingian (D1n) and Yujiangian (D1y), which belong to Lower Devonian and share similar orientations (Fig. 5). D1n in section #28 includes three sub-formations, namely, D1n13-1, D1n13-2 and D1n13-3. Meanwhile, D1y in section #28 also includes three sub-formations, namely, D1y1-1, D1y1-2 and D1y1-3. The orientations of these rock formations are highly similar with dip directions of 100°–110° and dip angles of 10°–15° (Fig. 5). Soft layers exist in both D1n and D1y (Fig. 5). The fractures are nearly perpendicular to and terminate at the soft layers, as shown in Fig. 6. For D1n and D1y1-1, the spacing of soft layers is usually 3–5 m (Fig. 5), and approximately 20% of the fractures have a relatively larger size than the soft layer spacing. The 3D network fracture network modelling can be executed. However, it requires that a large amount of fractures be cut off when intersecting soft layers, which makes the modelling process rather complicated. The assumption that the fractures are through-going can simplify the analysis and guarantee the safety of the engineering project to a certain extent. Considering that the fractures are assumed as through-going, we can directly generate through-going fractures between soft layers. Therefore, 3D fracture network modelling is not executed for fractures in D1n and D1y1-1.

Profile of section #28 around the sluice gate

Soft layers and fractures developed in D1n and D1y1-1
Compared with D1n and D1y1-1, the common spacing of soft layers is relatively larger in D1y1-2 and D1y1-3 (Fig. 5), typically 10–20 m, which is larger than the common size of fractures (usually 1–6 m). Thus, the fractures are not through-going as those in D1n and D1y1-1. The 3D distribution of the fractures developed in D1y1-3 and D1y1-2 has great influence on the stability of rock mass under high water pressure. Therefore, this paper presents the 3D fracture network modelling for the fractures in D1y1-2 and D1y1-3, as introduced in Sect. 4.
3.2 Data Acquisition
In section #28, fractures in the rock masses of D1y1-3 and D1y1-2 with trace lengths larger than 0.5 m were measured using the sampling window method. The data were collected on a nearly horizontal artificial excavated outcrop. Given that the sampling windows were rather large (693.5 m2 for D1y1-3 and 807.3 m2 for D1y1-2), both ends of each fracture were visible (Fig. 7).

The two-dimensional trace graph of the fractures investigated in the field
A total of 277 fractures in D1y1-3 and 390 fractures in D1y1-2 were collected in the field. The coordinates of the terminal points, dip direction, dip angle, aperture and fillings and the morphological characteristics of the joint planes were recorded. The orientations of the measured fractures immensely varied. Most of the collected fractures had steep dip angles greater than 60° and small apertures less than 3 mm. Small-scale fractures with mean trace lengths less than 4 m were common. Straight and smooth joint planes predominated in the collected fractures. Fillings included debris, gravel, sand and calcite.
Figure 7 shows two sets of fractures obtained in the field. Set 1 intersects the dam axis at a relatively small angle, whereas set 2 intersects at a relatively large angle. The grouping results were obtained using the method proposed by Shanley and Mahtab (1976), as shown in Table 2 and Fig. 8.

Pole and rose diagram of fractures collected from the field
Fracture set 1 is relatively more dangerous and should be monitored because it may form the failure plane with gentle-angled soft layers under high water pressure after the completion and water storage of the hydropower station. Consequently, the failure can greatly influence the stability of the dam. Different fracture sets have different effects on rock mass stability. Therefore, both sets were analysed for 3D fracture network modelling.
In the subsequent sections, the 3D fracture network modelling is based on the grouped fractures. Accordingly, four 3D fracture networks were generated for the two fracture sets of D1y1-3 and D1y1-2.
4 Modelling Results
4.1 Determination of Fracture Disc Diameter
For the two fracture sets of D1y1-2 and D1y1-3 (Sect. 3.2), E(r2) can be determined based on E(ch2) in the field using Eq. (2), as shown in Table 3. For different distribution types of r2, the values of D(r2) can be determined through the trial method described in Step (2) in Sect. 2. These values are listed in Table 3. Subsequently, Chi-square test is used to determine the most suitable distribution type of r2. The results of Chi-square (χ2) test and the ultimate distribution type of r2 are presented in Table 3.
Based on the random numbers of r2 [generated in Step (4) of Sect. 2.1], the random numbers of r are generated by deriving the square roots of r2. Chi-square test is performed to determine the final distributions of r (Table 4).
As mentioned in Step (5) of Sect. 2.1, the random numbers of r must be divided into X intervals to obtain the PDF of r′ (i.e. fracture disc radius in 3D space). In the present study, X is set to 100. The numbers N′α of the fractures with radii located in the 100 intervals can be obtained with Eqs. (3), (4) and (5). Subsequently, the random numbers with the corresponding values of N′α are generated in the 100 intervals, and the random numbers of r′ are determined by combining these random numbers. Finally, Chi-square test for population distribution is performed to determine the distribution parameters and types of r′ (Table 4).
The probability density curves of the fracture disc radii on the exposed rock surface (r) and in 3D space (r′) are generated respectively (Fig. 9). The histograms of fracture disc radii are also presented in Fig. 9.

Histogram and probability density curves of r and r′ of the strata of D1y1-3 and D1y1-2
4.2 Orientation and Density of Fractures
As discussed in Sect. 2.2, the frequencies of fractures with various orientations differ from those in the field. To derive the authentic frequencies of fractures with different orientations, the collected fractures are divided into several intervals according to their dip angles. In particular, the equal-area Schmidt projection diagram, which is divided into 47 patches of the same area, is utilised (Fig. 10). Subsequently, Eqs. (6), (7) and (8) (Sect. 2.2) are used to correct the frequencies of fractures in different intervals (Fig. 10).

Correction of orientation frequencies in equal-area Schmidt projection diagram
Fracture density, characterised by the number n of fractures in 3D space (Sect. 2.2), can be determined with the trial method by cutting the 3D fracture network with an imaginary exposed rock surface to derive the number of fracture traces N′. The ultimate value of n should be derived using Eq. (9), where A (area for fracture collection in field) and A′ (intersection area between the aforementioned plane and fracture network) should be initially determined. The value of A is easy to obtain in the field, as shown in Fig. 5 and Table 5. In the present study, the size of the generated 3D fracture network is 50 m (x axis) × 40 m (y axis) × 40 m (z axis). Thus, the value of A′ is 2000 m2 (50 m × 40 m) because the exposed rock surface is horizontal.
When N′ follows Eq. (9), the corresponding number n of fractures is the desired density of fractures. The designed values of n for each fracture set of the two strata are listed in Table 5.
5 Visualisation and Verification of 3D Fracture Networks
As mentioned in Sect. 2.2, 3D fracture networks can be generated through Monte Carlo simulation by stochastically synthesising fracture geometric factors (i.e. fracture disc diameter, density and orientation). The 3D fracture networks can be visualised as in Fig. 11.

3D graph of the 3D fracture network
To validate the proposed method, the generated networks are intersected by a plane with identical orientation to the exposed rock surface. The proposed method can be proven rational when the fracture traces of the plane and the exposed rock surface show similar statistical characteristics. As mentioned, fracture traces can be derived by cutting the 3D fracture network with an imaginary exposed rock surface. In this section, the horizontal plane passing the centre point (the coordinates of 25, 20 and 20 m) is selected as the imaginary surface, and the simulated fracture traces can be determined and recorded. Verification can be conducted by comparing the characteristics of the modelled fracture traces with the collected ones. The compared characteristics comprise fracture orientation, trace length and density. Specifically, fracture orientation is represented by Fisher constant. Density is represented by fracture number, P20 and P21. Trace lengths are assessed by their statistical parameters, including average and standard deviation. Table 6 reports the comparison results, from which it can be seen that the difference between the modelled and collected traces is less than 10%. Thus, the modelled 3D fracture network is rational.
For rigorous verification, the probability density curves of the lengths of simulated and collected fracture traces are obtained and shown in Fig. 12. Subsequently, the difference of each portion between the two types of traces can be observed and compared. Figure 12 shows that the probability density curves of the simulated and collected trace lengths are quite concordant. The correlation coefficients (R) of the two curves are all greater than 0.99. Therefore, the method used to determine the fracture size is not only rational but also highly precise.

Histogram and probability density curves of ch of the strata of D1y1-3 and D1y1-2
6 Discussion
E(ch2) and D(ch2) are critical components in the method of determining the PDF of fracture disc diameter (Sect. 2.1). However, they may differ from the true values of E (ch2) and D(ch2) in the field because fractures with ch values smaller than 0.25 m were not collected during investigation. Nevertheless, we still assumed that the proposed method in Sect. 2.1 was correct despite the truncation. To validate the conclusion, random numbers of ch2 (marked as F) were generated according to the steps discussed in Sect. 2.1. Numbers smaller than 0.0625 were removed (i.e. data with corresponding ch values less than 0.25 m and corresponding trace length values less than 0.5 m were removed). Thus, a new group of random numbers of ch2 (marked as F′) was formed. As shown in Table 7, the relative difference of E(ch2) and D(ch2) before and after truncation was lower than 10%, which was adequately small for fracture parameter discrepancy in practical engineering projects. In addition, as indicated by the probability density curve in Fig. 12, the probability of the fractures with ch values smaller than 0.25 m was extremely small, indicating that short fractures did not immensely affect the values of E(ch2) and D(ch2). Thus, the truncation minimally affected our proposed method. In this study, only the fractures with ch values larger than 0.25 m were considered.
From the aforementioned mathematical point of view, ch values smaller than 0.25 m had little influence on 3D fracture network modelling. However, large quantities of small fractures with ch values less than 0.25 m were observed during investigation. Deriving the PDF of ch might be particularly complicated if small fractures were considered in the present work. In engineering practice, small fractures minimally affect the failure and deformation of rock masses. Thus, the omission of small fractures as commonly performed was reasonable in this study (Barton and Larsen 1985; Han et al. 2016). However, the mechanical influences of truncated fractures were not recommended to be omitted. Although small fractures had an inferior role in affecting the rock mass properties compared with large-scale fractures, they gained numerical superiority and had a huge influence on rock strength weakening. Therefore, a rational operation for using fracture network is that the mechanical parameters of rock samples comprising these small fractures should be first determined (Min and Jing 2003; Laghaei et al. 2018). Then, the 3D fracture network is added into the rock mass for subsequent mechanical analysis.
Directly characterising the fracture disc diameter distribution in the field is a difficult task (Villaescusa and Brown 1992). Thus, fracture size is estimated from the trace length measurement in outcrops or excavation faces. Different from current researches on the distribution of fracture disc diameter (r) (Hudson and Priest 1979; Warburton 1980; Villaescusa and Brown 1992; Zhang and Einstein 2000), we focused on the distribution of r2. Considering that trace length distribution is insensitive to major changes in joint size distribution (Villaescusa and Brown 1992), we focused on whether the selected distribution of r2 can generate appropriate ch rather than on the idealised distribution of r or r2. ch was fully considered in the procedures to determine the fracture diameter in Sect. 2.1. Consequently, the concordance between the simulated and field collected ch explained the rationality of distribution assumption of r2.
The probability density curves generated in this study are smooth frequency representations of the histograms of the collected fracture trace lengths. However, the curves and top locations of the histograms do not perfectly correspond to one another (Fig. 12). This problem, which can affect the precise determination of the 3D fracture diameters of rock masses in the field, may be attributed to two aspects. The first aspect is the finite quantity of fractures collected in the field, which indicates that the difference between the probability density curve of modelling and the histogram of the collected trace lengths may be reduced by collecting additional fractures in the field. The second aspect is related to the nature of a probability density curve, which is only an ideal but simplified representation of the distribution pattern of collected trace lengths, whereas the true distribution in nature may be so complicated that it is impossible to describe with an ideal curve. Further research is necessary for the second aspect. However, the difference in Fig. 12 is still acceptable because the difference is allowable from the perspective of engineering requirements.
7 Conclusion
In this study, we presented a new rapid 3D fracture network modelling method that is oriented towards large sampling windows. The determination methods of the key geometric parameters of fracture size, orientation and density were presented. Fracture size was emphasised amongst the three parameters. The modelling results proved the rationality of the newly proposed method for 3D fracture network modelling.
For the fracture data collected with large sampling windows, the disc radii (i.e. size) of fractures are easily derived from the lengths of traces, in which both ends of fractures are visible. The mean of the square of disc radius is proven to be 1.5 times of the mean of the square of half-trace length. The variance of the square of the disc radius is determined through the trial method in accordance with the modelling results and field data. The density of the fractures collected with large sampling windows is also determined via the trial method. Considering the frequency difference between fractures collected from the exposed surface and those developed in 3D space, the sizes of the collected fractures should be calibrated to obtain an authentic 3D fracture size distribution. The orientations of 3D fractures can also be corrected using this calibration method.
The method is oriented towards the modelling for large sampling windows, in which the both ends of the fractures are visible. The procedure of trace length calibration can be avoided, and the fracture density can be simply determined through trial method. Furthermore, the proposed method is highly precise, as evidenced by the compared PDFs of trace lengths of the imaginary exposed rock surface and those collected in the field. However, the proposed method utilises truncated data. Nevertheless, as explained in Sect. 6, truncation has a negligible effect on modelling. We selected the rock mass lying downstream of the sluice gate of Datengxia hydropower station in China as the study objects for application of the newly proposed method.
Abbreviations
- A :
-
The area for fracture collection in the field [m2]
- A′:
-
The intersection area between the three-dimensional fracture network and the virtual exposed rock surface [m2]
- α :
-
The average intersection angle of the fracture disc to the exposed rock surface in an interval of dip angle [°]
- ch:
-
Half-trace length [m]
- χ 2 :
-
Chi square [–]
- D :
-
Standard deviation [–]
- E :
-
Average value [–]
- F :
-
The random numbers of ch2 [m2]
- F′ :
-
The random numbers of truncated ch2 [m2]
- f :
-
The probability that a fracture can be collected on the exposed rock surface [–]
- γ :
-
The scale parameter of gamma distribution [–]
- θ :
-
The intersection angle of the fracture disc to the exposed rock surface [°]
- k :
-
The shape parameter of gamma distribution [–]
- L :
-
The height of three-dimensional space that accommodates the fractures [m]
- λ :
-
The rate parameter of negative exponential distribution [–]
- M S :
-
Magnitude of earthquake [–]
- μ :
-
The identical location parameter of logarithmic normal distribution [–]
- N :
-
The number of fractures collected in the field [–]
- N′ :
-
The number of fracture traces in the virtual exposed rock surface [–]
- N α :
-
The number of fractures collected from the field intersecting the exposed rock surface at an average intersection angle of α [–]
- N ′ α :
-
The number of fractures in three-dimensional fracture network intersecting the exposed rock surface at an average intersection angle of α [–]
- n :
-
The number of fractures in the three-dimensional fracture network (fracture density) [–]
- n ab :
-
The number of fractures with radius between a and b that intersects with the exposed rock surface [–]
- n′ab :
-
The number of fractures with radius between a and b in three-dimensional space [–]
- P 1 :
-
Frequency of fractures of different orientations in the field [%]
- P 2 :
-
Frequency of fractures of different orientations in three-dimensional fracture network [%]
- P 20 :
-
Number of fracture traces per unit area [m−2]
- P 21 :
-
Total length of fracture traces per unit area [m/m2]
- r :
-
Fracture disc radius [m]
- r′ :
-
Fracture disc radius in three-dimensional space [m]
- σ :
-
The identical location parameter of logarithmic normal distribution [–]
- u :
-
The distance between the fracture disc centre and the midpoint of the fracture trace [m]
- U(0,1):
-
Uniform distribution between 0 and 1
- X :
-
The number of intervals divided from the random numbers of r [–]
References
Barton CC, Larsen E (1985) Fractal geometry of two-dimensional fracture networks at Yucca Mountain, Southwestern Nevada. In: Fundamentals of rock joints: proceedings of the international symposium on fundamentals of rock joints, pp 77–84. https://corescholar.libraries.wright.edu/ees/74
Bauer M, Toth TM (2017) Characterization and DFN modelling of the fracture network in a Mesozoic karst reservoir: Gomba Oilfield, Paleogene Basin, Central Hungary. J Pet Geol 40(3):319–334
Billaux D, Chiles JP, Hestir K, Long J (1989) 3-Dimensional statistical modeling of a fractured rock mass—an example from the Fanay-Augeres mine. Int J Rock Mech Min Sci Geomech Abstr 26(3–4):281–299
Bryant FB, Satorra A (2012) Principles and practice of scaled difference Chi-square testing. Struct Equ Model A Multidiscip J 19(3):372–398
Cheng JT, Morris JP, Tran J, Lumsdaine A, Giordano NJ, Nolte DD, Pyrak-Nolte LJ (2004) Single-phase flow in a rock fracture: micro-model experiments and network flow simulation. Int J Rock Mech Min Sci 41:687–693
Fouche O, Diebolt J (2004) Describing the geometry of 3D fracture systems by correcting for linear sampling bias. Math Geol 36(1):33–63
Grenon M, Hadjigeorgiou J (2003) Open stope stability using 3D joint networks. Rock Mech Rock Eng 36(3):183–208
Han XD, Chen JP, Wang Q, Li YY, Zhang W, Yu TW (2016) A 3D fracture network model for the undisturbed rock mass at the Songta Dam site based on small samples. Rock Mech Rock Eng 49(2):611–619
Hudson JA, Harrison JP (1997) Engineering rock mechanics: an introduction to the principles. Pergamon, London
Hudson JA, Priest SD (1979) Fracture and rock mass geometry. Int J Rock Mech Min Sci Geomech Abstr 16:339–362
Kulatilake PHSW, Wu TH (1984) Estimation of mean trace length of discontinuities. Rock Mech Rock Eng 17(4):215–232
Kulatilake PHSW, Wu TH (1986) Relation between discontinuity size and trace length. In: Proceedings of the 27th U.S. rock mechanics symposium
Laghaei M, Baghbanan A, Hashemolhosseini H, Dehghanipoodeh M (2018) Numerical determination of deformability and strength of 3D fractured rock mass. Int J Rock Mech Min Sci 110:246–256
Lambert C, Thoeni K, Giacomini A, Casagrande D, Sloan S (2012) Rockfall hazard analysis from discrete fracture network modelling with finite persistence discontinuities. Rock Mech Rock Eng 45(5):871–884
Ma JJ, Lu D, Liu ZL (2017) Application of 3D laser scanning technology in complex rock foundation design. 3D Res 8(4):34
Mantel N (1963) Chi-square tests with one degree of freedom; extensions of the Mantel–Haenszel procedure. J Am Stat Assoc 58:690–700
Min KB, Jing LR (2003) Numerical determination of the equivalent elastic compliance tensor for fractured rock masses using the distinct element method. Int J Rock Mech Min Sci 40(6):795–816
Morales A, Sanchez-Aparicio LJ, Gonzalez-Aguilera D, Gutierrez MA, Lopez AI, Hernandez-Lopez D, Rodriguez-Gonzalvez P (2017) A new approach to energy calculation of road accidents against fixed small section elements based on close-range photogrammetry. Remote Sens 9(12):1219
Oda M (1982) Fabric tensor for discontinous geological materials. Soils Found 22:96–108
Palleske CK, Hutchinson DJ, Elmo D, Diederichs MS (2013) Impacts of limited data collection windows on accurate rock simulation using discrete fracture networks. In: 47th U.S. rock mechanics/geomechanics symposium. American Rock Mechanics Association
Priest SD (1985) Hemispherical projection methods in rock mechanics. George Allen & Unwin, London
Priest SD (1993) Discontinuity analysis for rock engineering. Chapman & Hall, London
Priest SD, Hudson JA (1981) Estimation of discontinuity spacing and trace length using scanline survey. Int J Rock Mech Min Sci Geomech Abstr 18(3):183–197
Robertson AM (1970) The interpretation of geological factors for use in slope theory. In: Planning open pit mines, pp 55–71
Shanley RJ, Mahtab MA (1975) FRACTAN: a computer code for analysis of clusters defined on the unit hemisphere. Bureau of Mines, IC8671
Shanley RJ, Mahtab MA (1976) Delineation and analysis of clusters in orientation data. J Int Assoc Math Geol 8(1):9–23
Terzaghi RD (1965) Sources of error in joint surveys. Geotechnique 15:287–304
Tonon F, Chen S (2007) Closed-form and numerical solutions for the probability distribution function of fracture diameters. Int J Rock Mech Min Sci 44(3):322–350
Tonon F, Chen S (2010) On the existence, uniqueness and correctness of the fracture diameter distribution given the fracture trace length distribution. Math Geosci 42(4):401–412
Vazaios I, Vlachopoulos N, Diederichs MS (2017) Integration of Lidar-based structural input and discrete fracture network generation for underground applications. Geotech Geol Eng 35(5):2227–2251
Villaescusa E, Brown ET (1992) Maximum likelihood estimation of fracture size from trace length measurements. Rock Mech Rock Eng 25(2):67–87
Warburton PM (1980) A stereological interpretation of joint trace data. Int J Rock Mech Min Sci Geomech Abstr 17(4):181–190
Wathugala DN, Kulatilake PHSW, Wathugala GW, Stephansson O (1990) A general procedure to correct sampling bias on joint orientation using a vector approach. Comput Geotech 10(1):1–31
Zhang LY, Einstein HH (2000) Estimating the intensity of rock discontinuities. Int J Rock Mech Min Sci 37(5):819–837
Zhang N, Zhang Y, Gao YF, Pak RYS, Yang J (2019a) Site amplification effects of a radially multi-layered semi-cylindrical canyon on seismic response of an earth and rockfill dam. Soil Dyn Earthq Eng 116(1):145–163
Zhang N, Zhang Y, Gao YF, Pak RYS, Wu YX, Zhang F (2019b) An exact solution for SH-wave scattering by a radially multi-layered inhomogeneous semi-cylindrical canyon. Geophys J Int 217(2):1232–1260
Acknowledgements
This work was supported by National Key Research and Development Plan (Grant No. 2017YFC1501000), the National Natural Science Foundation of China (Grant Nos. 41877220 and 41472243), and National Natural Key Science Program Foundation (Grant No. 41330636).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Nie, Z., Chen, J., Zhang, W. et al. A New Method for Three-Dimensional Fracture Network Modelling for Trace Data Collected in a Large Sampling Window. Rock Mech Rock Eng 53, 1145–1161 (2020). https://doi.org/10.1007/s00603-019-01969-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00603-019-01969-4