
Abstract
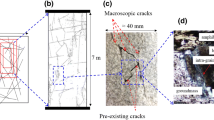
This study aims to explore dynamic behaviours of fracturing and damage evolution of rock materials at the grain scale. A grain-based discrete element method (GB-DEM) is proposed to reveal microscale characterisation and mineral grain compositions of rock materials realistically. Micro-parameters of GB-DEM are obtained by calibrating quasi-static strengths, elastic modulus, stress–strain curves, and fracture characteristics of igneous rocks. Comprehensive numerical simulations are conducted to compare with dynamic experimental results obtained by the split Hopkinson pressure bar (SHPB). The reasonability of using the GB-DEM is presented to validate fundamental pre-requisites of the SHPB technique. Combined with crack strain and acoustic emissions, the rate dependency of crack initiation stress threshold and crack damage stress threshold is investigated. The dynamic damage evolution in the form of Weibull distribution is distinctively different from that in static tests and the shape/scale parameters are presented as functions of strain rate. Moreover, microcharacteristics of crack fracturing transition and fracturing patterns formation are discussed in detail. It is found that there exist two classes of mechanical behaviour (i.e., Class I and Class II) observed from stress–strain responses of dynamic tests. Main fracturing surfaces induced by intergranular fractures split the specimen along the direction of stress wave propagation in the type of Class I behaviour. Branching cracks derive the cracks’ nucleation and in turn increases the fragment degree. A shearing band formed near the fracture surface is caused by grain pulverisations, which eventually enhances the sustainability of rocks under dynamic loading. At last, we propose a generalised equation of dynamic increase factor in the range from 10− 5 to 500/s, and also discuss the characteristic strain rate.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Rock deformation and breakage behaviours under dynamic loading have a significant impact on a wide range of engineering areas such as tunnelling (Hajiabdolmajid and Kaiser 2003), earthquake ruptures (Aben et al. 2017), projectile penetration (Heuze 1990), planetary bodied collision (French 1998), and exploration drilling for oil, gas, and mineral deposits (Hogan et al. 2012). Rock pulverisation or fault rupture, consists of fragments much smaller than the naturally existed crystals of intact rock, has been found surrounding faults induced by dynamic slip localisation (Doan and Gary 2009; Yuan et al. 2011) and successive coseismic loading (Aben et al. 2016). This intensively fractured rock indicated the fragment formation or damage process generally behave in strong rate dependency and the energy dissipation or fragment size distribution is significantly different from that of static loading (Hogan et al. 2016; Zwiessler et al. 2017; Aben et al. 2017). Reliable characterisation of the rock properties under dynamic loading is crucial. The SHPB is used substantially in the range of \(\dot {\varepsilon }\) = 101–104/s which is generally considered as high strain rate (HSR) (Kolsky 1949; Gray 2000; Zhou et al. 2011; Zhang and Zhao 2014). This technique has been extensively utilised to investigate the mechanical behaviours of geological materials, e.g., failure strength (Olsson 1991; Lankford and Blanchard 1991; Kimberley et al. 2013; Fondriest et al. 2017), crack damage threshold (Xing et al. 2018; Li et al. 2017), fragment size distribution (Hogan et al. 2012, 2013), and fracture toughness (Chen et al. 2009; Wang et al. 2011; Zhang and Zhao 2013; Dai and Xia 2013) under extreme loads in laboratory. Although some new techniques such as ultra-high speed cameras (Xing et al. 2017), splitting-beam laser extensometer (Panowicz et al. 2017), and high-speed X-ray imaging (Huang et al. 2016) have been applied to SHPB testing, the dynamic damage process and microscale fracturing of materials are still challenging to be quantitatively measured. Especially, by considering the small strain to failure of brittle materials (i.e., less than 1.0%), several uncertain issues, such as the improvement of a valid strain-rate range, reproducing the micro-damage process under dynamic loading, and the instinct micro-fracturing mechanisms, considering the heterogeneity of rocks, are remaining to be addressed.
The numerical method is an alternative approach aimed to overcome experimental difficulties to investigate dynamic behaviours of rocks. Continuum-based methods are widely used in conjunction with the damage degradation or plastic flow, e.g., finite-element method (FEM) (Hao et al. 2012; Fang and Xu 2016; Régal and Hanus 2017), finite-difference method (FDM) (Zhong et al. 2015), smooth particle hydrodynamic method (SPH) (Ma et al. 2014; Baranowski et al. 2014), and rock failure process analysis (RFPA) (Zhu and Tang 2006; Zhu et al. 2015; Liao et al. 2016). These methods normally incorporate rate-dependent constitutive models, e.g., the HJC model (Shemirani et al. 2016), the dynamic Drucker–Prager model (Yu et al. 2017), the RHT model (Riedel et al. 1999), the K&C model (Malvar et al. 1997), or a modified one (Li and Meng 2003; Polanco-Loria et al. 2008; Tu and Lu 2010) to describe the phenomenological failure of the continuum matrix that relate to stiffness degradation and strain softening. With a focus on the realistic rupture diffusing from the initial defect existed, cohesive zone models (Zhou and Molinari 2004; Molinari et al. 2007; Kazerani and Zhao 2011; Gui et al. 2016) allow the crack propagating along the edges of standard elements. The combined finite-discrete element method is also used to investigate the fracturing process of rocks (Ma et al. 2018; Mahabadi et al. 2010; Osthus et al. 2018; Rougier et al. 2014; Saksala et al. 2013; Saksala 2015, 2016). In recent decades, mesh-free methods (Ren and Li 2012) and smooth particle hydrodynamic methods (SPH) (Rabczuk and Eibl 2003) have been applied to reveal the fracturing and fragmentation of brittle materials in the context of continuum frame. The peridynamics (PD) method is a nonlocal formulation of continuum mechanics which is used to solve discontinuous problems such as crack initiation, coalescence and interaction (Zhou et al. 2015a, b; Wang et al. 2016). Further applications of the PD in dynamic fracturing include concrete tensile fracturing at HSR (Gu et al. 2016), crack propagation and branching in functionally graded materials (Cheng et al. 2018) and modelling the complex fracturing behaviours of a single flaw embedded in rock-like materials (Ha et al. 2015). The discontinuum-based method has recently been used to model a great number of defects propagating, branching, and coalescing with each other (Ma et al. 2010; Xu et al. 2016), and the heterogeneity of geological materials can be reproduced by generating a structure of polygonal particles with various contact sizes. The previous studies (Donze et al. 1999; Brara et al. 2001; Hentz et al. 2004a, b; Wang and Tonon 2011, etc.) presented explorations on the fracture propagation or fragment pulverisation of rocks under dynamic loading. Although the investigations of influence on the microcracking path choices and macrobehaviours as a result of the grain-scale heterogeneity or naturally existed defects were performed in the DEM modelling (e.g., Lan et al. 2010; Peng et al. 2017), such characteristics seem to be more popular for rock materials containing randomly distributed mineral grains of crystalline rocks.
Multi-scale homogenisation is a hierarchical method to incorporate microscale modelling into macroscale modelling (Sun et al. 2017). At the grain scale, the rock heterogeneity is characterised by the presence of different mineral grains and randomly distributed geometry. The continuum model (Li et al. 2003; Villeneuve et al. 2011; Ma et al. 2014; Farahmand and Diederichs 2016) and discrete–continuum model (Liu et al. 2016) in association with grain morphology have been reported for modelling heterogeneous rocks. To reproduce the de-bonding behaviours between mineral grains, the grain boundaries are treated as discontinuities existed in nature and the fracturing pattern is determined by the stress state adjacent to the polygonal blocks in association with the Voronoi tessellation technique in DEM (Lan et al. 2010; Christianson et al. 2006; Lin et al. 2007; Nicksiar and Martin 2014; Tan et al. 2016; Li et al. 2017). Although simulated results seem to be comparable with the realistic failure observed in experiments, the impossibility of transgranular fracturing limits its further application to fine simulation. Particle clustered polygonal grains can be used to overcome these shortcomings (Bahrani et al. 2014; Bahrani and Kaiser 2017; Park et al. 2017). The intergranular contacts are inherited from the algorithm presented in block-based DEM, and the transgranular contacts are applied to reproduce fracturing behaviours of grain materials themselves. The most common approach used in the particle-based modelling for grains is to associate with heterogeneity through a stochastic distribution (Bahrani and Kaiser 2017). However, these stochastic models lead to qualitative results, since the heterogeneity is dependent on the statistical distribution parameters. In this study, the digital image processing incorporation with DEM is presented to reproduce the actual heterogeneity of the sample.
This paper aims to reproduce the SHPB loading principle by incorporating the DEM. The validities of SHPB technique using DEM are discussed to decrease the uncertainties caused by stress wave dispersion, end friction, and stress un-equilibrium. The realistic heterogeneity of rock sample was obtained by the digital image scanning, and then, a simplified geometry was imported in DEM to build the grain-scale structures and mineral compositions of rocks. The grain-based DEM (GB-DEM) is calibrated according to static uniaxial compression and direct tension tests. The reasonability of GB-DEM on the SHPB technique is validated by comparing with laboratory investigations. This microscopic model is then used to reproduce fracturing process under dynamic loading. Finally, we discussed the dynamic increase factor (DIF), stress thresholds, dynamic damage evolutions, and fracturing characteristics associated with energy dissipation.
2 Grain-Based Discrete Element Model (GB-DEM) for Rocks
2.1 Microstructures and Mechanical Properties of Rock
Rock heterogeneity is characterised by the presence of grain-scale minerals and microstructures (i.e., grain structures and initial defects) (Mahabadi et al. 2012). The geometric heterogeneity resulted from the angular shape and grain size, but due to the discretisation of mechanical properties of minerals, material heterogeneity and the anisotropy of contacts make up the macroscopic heterogeneity of the medium. The grain size distribution is a considerable index to describe the heterogeneity characteristics of rocks. The representative photomicrographs presented in Fig. 1 show that the granite sample is mainly composed of feldspar (51.7%), quartz (26.3%), biotite (19.5%), and other mineral compositions (2.5%), as listed in Table 1. The grain size distributions are approximately isotropic and seriate, with average grain sizes from 0.95 to 2.38 mm for different minerals, as shown in Fig. 2. The grain size ratios (\({d_{\hbox{max} }}/{d_{\hbox{min} }}\)) of feldspar, quartz, and biotite are 5.4, 3.2, and 2.6, respectively. Obtaining reliable micromechanical properties of mineral materials is importance. Physical densities of minerals are estimated by numerous mineral identification references, as listed in Table 1. Elastic properties such as bulk modulus Kg and shear modulus µg are determined from the compressibility measurement at zero-confining pressure. The elastic modulus Eg and Poisson’s ratio υg are acquired by \({E_{\text{g}}}=9{K_{\text{g}}}{\mu _{\text{g}}}/(3{K_{\text{g}}}+{\mu _{\text{g}}})\) and \({\upsilon _{\text{g}}}=(3{K_{\text{g}}} - 2{\mu _{\text{g}}})/(6{K_{\text{g}}}+2{\mu _{\text{g}}})\). In general, the quartz has the greatest elastic modulus Eg,Qz = 94.5 ± 6.8 GPa, but the lowest Poisson’s ratio υg,Qz = 0.08 ± 0.02. The biotite has the opposite characteristics Eg,B = 33.8 ± 12.4 GPa and υg,B = 0.36 ± 0.14. Comparatively, the feldspar is easily influenced by the surrounding environment and intrinsic compositions. The average elastic modulus is Eg,F = 39.7 ± 26.4 GPa, and the average Poisson’s ratio is υg,F = 0.32 ± 0.14. Suggested mineral strength values of uniaxial compression strength σc, tensile strength σt, and fracture toughness KIC have been discussed (Villeneuve et al. 2011) and the friction coefficients of grain boundaries and grains are studied (Horn and Deere 1962; Morrow et al. 2000).

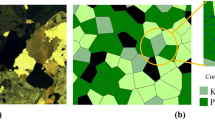
Optical microscope photomicrographs showing crystalline structures and mineral compositions of granite. a Photomicrograph for feldspar and quartz. b Photomicrograph for quartz and biotite. Qz quartz, F feldspar, B biotite

Representative mineral compositions and their number distributions with various grain diameters for granite rock sample
2.2 Grain-Based Discrete Element Modelling (GB-DEM)
Realistic reproduction of the grain shape, distribution, and orientation based on the digital image processing is presented in this section. Figure 3 illustrates the grain-based model generation. The first step is to identify grain categories according to the grey-level imaging. For granite, the feldspar has the highest grey level, followed by quartz and biotite. Different mineral compositions are distinguished by setting colour thresholds, and the precision is determined by the image pixels of the optical microscope image. The second step is to locate the grain shapes and positions by identifying vertexes of the grain edge. To be compatible with numerical modelling, the grains are simplified as convex polygon tessellations in GB-DEM. The third step is to import the geometry information into the particle-based model, and the clustered particles are distinguished as different kinds of mineral. In general, the intergranular contacts are treated as joint models with reduced mechanical properties of materials. The widely used contact model in GB-DEM is the smoothjoint model which can capture the behaviour of an interface regardless of the local particle contact orientation. However, the smoothjoint contact overlooked the initial cohesion existed in boundaries which have rotation resistance around grains. At the large strain, the smoothjoint contact is active only when the surface gap is negative, which results in the interlocking problem and further decreases the realistic behaviour of boundary joints (Mehranpour and Kulatilake 2017). A compromised treatment is performed in this study to overcome this shortcoming. The intergranular contact is modelled as parallel bonds and the boundary particles are set small enough to minimise the inherent toughness resulting from interlocked particles.

(modified from Li et al. 2018)
Flow chart of the generation of the grain-based model. Methodology is used to generate polygons on the basis of realistic grain distribution in combination with image scanning technique
In bond parallel model (BPM), the particles are bonded by parallel contacts with linear elastic springs both in normal and shear directions. The microshear strength is mobilised when the bond is broken either by shear or rotation. Once the contact is broken, the shear strength is set to residual strength which is a function of the normal force and friction coefficient. The tensile strength of the bond is set to zero regardless of its contact condition when a tensile contact is broken. Comparatively, rock models in which the material is represented as a continuum by a net of weak bonds exhibit more realistic responses regarding shear and post-failure behaviour than most continuum models. However, the micro-mechanisms occurring in rocks are complicated and difficult to characterise within the frame of existing continuum theories. The BPM directly approximates rocks as a cemented granular material, which is similarly observed microscopically with an inherent length scale and provides a synthetic material that can be used to verify how the microstructure affect macro response.
GB-DEM retains methodology of particulate discrete element modelling proposed by Cundall and Strack (1979) and has remained advances in computational performance which are allowed for multi-scale and complicated simulations by resembling particles with bonded contacts. Contact forces are calculated by identifying which particles interact with one another and the velocities and displacements are updated by integrating the accelerations on the basis of Newton’s second law motion. The particles are treated as spherical and rigid bodies in GB-DEM and large deformations are allowed by overlapping or slipping of the contact between two neighbouring particles. Two-scale structures exist in GB-DEM as (a) grain behaviours between mineral grains (intergranular) and (b) particle behaviours intragrains as transgranular behaviours (Li et al. 2018). Two structures have the same contact principle as proposed by parallel bond model, and the inhomogeneity is ensured by setting different micro-parameters such as stiffness, strength, and friction coefficient for different mineral grains.
The modelled mineral grains are shown in Fig. 4, and tessellated polygonal materials are quartz, feldspar, biotite, and others. The grain distribution is one-to-one mapped from the photomicrographs of the sample. The grain shape is modelled as convex polygons with geometry heterogeneity, as shown in Fig. 4a. The average grain diameter is 1.52 mm and the minimum particle radius is 0.08 mm. Contacts across the grain boundaries are grouped as intergranular discontinuities, and the microscopic models are assumed as parallel bonds (Fig. 4b). Internal to the grain in Fig. 4c includes 46–73 particles for different mineral compositions. Therefore, the fractured contacts can be categorised into tensile fracturing, shear fracturing on grain boundaries and tensile fracturing, and shear fracturing in the grains, as shown in Fig. 4d. The transgranular particles are treated as homogeneous materials, and the contacts’ orientation distribution is illustrated in Fig. 4e. Similar results for grain boundaries in Fig. 4f show that the intergranular contacts are heterogeneously distributed.

a Element composition of the grain-based discrete element method (GB-DEM), yellow polygons are the grain boundaries. b Contact generation and distribution on the grain boundary. c Mineral grains distribution. d Examples of broken contacts after an impact loading. Red existed grain contacts, blue transgranular tensile fracture, black intergranular tensile fracture, and green intergranular shear fracture. e Transgranular contacts’ orientation distribution within the generated specimen. f Intergranular contacts’ orientation distribution. TG transgranular, IG intergranular. (Color figure online)
2.3 Calibration of Microcharacteristics
The crucial step in GB-DEM is to properly select bond micro-properties according to the known macro-properties including elastic modulus E, Poisson’s ratio υ, uniaxial compressive strength σc, and direct tensile strength σt in experiments. Potyondy and Cundall (2004) indicated that under uniaxial loading, the disk or spherical particle model resulted in a lower peak strength envelope in comparison with the strength envelope obtained in the laboratory. To overcome it, a novel assembly with finite-strength particle clusters is proposed to increase the slope of the strength envelope. The cluster with irregular grain boundaries will increase the friction angle which is more appropriate to simulate the failure process of rock, as shown in Fig. 5a, b. Li et al. (2016) demonstrated that the cluster allowed failure within cluster coincident with the transgranular fracture, which shows a reasonable agreement with experimental observations under high confining pressure or dynamic loading. Since there is no significant effect of the particle size on the conventional tests, the assembly model, consisting of 164,863 particles in the domain of 50 mm wide and 100 mm long, is built for the calibrations of static uniaxial compression and tension tests. Moreover, additional calibrations have been done to validate the loading process including the elastic modulus and Poisson’s ratio, as shown in Fig. 5a, b. The overall results obtained by the clustered model are well matched with the macro-responses of experiments, particularly the elastic modulus and peak failure strength. The post-peak softening of experimental compression test is not as obvious as that of numerical results. For the tension test, the simulated brittleness dilation is weaker than the experimental observation. The failure modes of numerical uniaxial compression and tension tests are compared with those of experimental tests in Fig. 5c, d. The shear band generated within the specimen shows good agreement with the experimental observation, and the fracture across the specimen is dominated by tensile cracks in the tension test. The calibrated results of specimens are listed in Table 2. The overall macro-properties of simulations and experiments are well agreed. The average values of uniaxial compressive strength in the experiment and simulation are 129.6 and 127.4 MPa, respectively. For the tension test, the numerical model has a lower strength with an error of 5.9%.

Comparison of the stress–strain curves obtained by laboratory test and numerical results for a uniaxial compression test (UCT) and b direct tension test (DTT). Solid lines are experimental results, and dotted lines are simulated results. In UCT, the experimental results are \({E_{{\text{sta}}}} - 42.3\) GPa, \({\sigma _{\text{c}}}=\) 129.6 MPa, and \(\upsilon\) = 0.21, corresponding simulated results are \({E_{{\text{sta}}}} - 44.6\) GPa, \({\sigma _{\text{c}}}=\) 127.4 MPa, and \(\upsilon\) = 0.21. In DTT, the tensile strengths are \({\sigma _{{\text{t}}.{\text{exp}}}}=\) 11.5 MPa and \({\sigma _{{\text{t}}.{\text{num}}}}=\) 12.7 MPa. c Static uniaxial compression test. d Static direct tension test. Black intergranular tensile crack (IG: tensile), blue intergranular shear crack (IG: shear), orange transgranular tensile crack (TG: tensile), and green transgranular shear crack (TG: shear). (Color figure online)
3 SHPB Technique and GB-DEM Modelling
3.1 Principle of the SHPB Apparatus
A typical SHPB test consists of a striker, an incident bar, a transmitted bar, a damping configuration, and a sample sandwiched between the incident bar and transmitted bar, as shown in Fig. 6. The impact of the striker generates a compressive wave travelling from the incident bar toward the sample (Fig. 6a). The sample response [e.g., strain ε(t)] can be measured by strain gauges mounted on the bars using the three-wave analysis, as shown in Fig. 6b. The validity of the SHPB technique has two assumptions: the stress wave propagation in the specimen and bars is one-dimensional and stress equilibrium in the specimen after an initial ‘ringing-up’ period can be ensured (Gama et al. 2004). To ensure the pre-requisites determining the success of using the SHPB technique, several techniques (e.g., wave dispersion eliminating, and ends friction eliminating) will be detailed in the following parts.

a Schematic of the Spilt Hopkinson Pressure Bar (SHPB) testing system and stress wave propagation in bars. b Typical incident, reflected and transmitted waves after the time shift by three-wave method
3.1.1 Modelling 1D Wave Propagation on Bars
Increasing the wavelength/diameter of the pressure bar is widely used in the experiments to decrease the geometry dispersion (Zhang and Zhao 2014). By considering the homogeneity of geomaterials, the IRSM suggested that the diameter of the specimen should be close to 50 mm or at least ten times the average grain size of rocks (Zhou et al. 2011). Meanwhile, the larger specimen has the advantages of eliminating the ends effect resulting from the friction on the interface. The solution obtained in this study is to restrain the Poisson’s effect (υ = 0.0) of the pressure bars using rectangularly distributed particles, as shown in Fig. 7. Two 800 mm length bars filled with regular-distributed particles and random-distributed particles are generated to compare the wave dispersion propagated in the finite diameter bars. Three measurement boxes (measurements A–C) shown in Fig. 7a are set up at different positions paralleling to the wave propagation direction to evaluate the axial dispersion. Other three points (Poi. 1–3) are set to record lateral dispersions at the measurement box A. Lateral unbalance force distributions are plotted in Fig. 7b in association with the homogeneity differences. The unbalance force range covers from − 300 to 600 N considering the Poisson’s effect of bars and that of the rectangularly filled bar is nearly zero when the incident stress is approaching 250 MPa. Figure 7c illustrates the stress histories (σxx,σyy) measured at points 1–3 for two bar modelling methods as-mentioned above. In terms of the rectangularly distributed bar, σxx distributions at different y positions are the same and σyy approximates to zero. Such dispersion is highly strengthened when the Poisson’s effect is accounted and the maximum difference between σxx is as high as 82.3 MPa (0.33σi). Similar results can be drawn for σyy and the induced stress by lateral inertia is around 27.8 MPa (0.11σi). The stresses at different x positions for the method I in Fig. 7d and the method II in Fig. 7e indicate that there is no significant oscillation occurred along the wave propagation direction. The lateral inertia stress σyy on the neutral axis is negligible, and thus, the 1D wave propagation within the bars is ensured when particles are regularly distributed.


Dispersion comparison of the semisinusoidal wave propagating in finite length bar modelled as random-distributed particles or rectangular-distributed particles. a Schematic of the bar geometry, measurement circles in the x direction (wave propagation direction) and measurement particles in the y direction. b Unbalance force distribution in the lateral direction of random-distributed particles and regular-distributed particles, respectively. c Comparison of the stress histories at x = 50 mm (axial stress and lateral stress) of random-distributed particles and regular-distributed particles, respectively. d Stress dispersion at measurements A, B, and C along the bar direction of regular-distributed particles. e Stress dispersion at measurements A, B, and C along the bar direction of random-distributed particles
The multiaxial constraint induced by the end friction not only leads to the increase of dynamic failure strength, but also cannot remain satisfied with the 1D loading assumption. To eliminate the friction among contacts, the following treatments are conducted. The boundary contacts between the bar particles and sample particles are replaced by the smoothjoint model; therefore, the forces transmitted by the contacts are only parallel to the x direction (Fig. 8). The shear stiffness \({\bar {k}_{\text{s}}}\) and the friction coefficient µ of the smoothjoint contacts are set as zero. The particles at the ends of the interface are regularly arranged, and the average radius of the particles rb within the bars is equal to that of the specimen to ensure the centre collision between boundary balls. The specimen is clustered particle modelling which results in smooth contact boundaries to minimise the dispersion effects.

Smoothjoint interface between the specimen and the bars eliminating the end friction effect. a Example of the boundary element. b Schematic of the smoothjoint contact, this model restricts the force of the contact is only in the x direction regardless of the contact orientation. c Schematic of the parallel bond contact, the global force of the contact is related to the contact orientation
3.1.2 Modelling Stress Equilibrium on Bars
Decoupling the rate dependency of materials and inertia effects is a crucial step to solve the dynamic problem using the SHPB. In experiments, the specimen slenderness ratio is suggested as \(L/d={\left( {3\upsilon /4} \right)^{1/2}}\) to minimise the dispersion by Davies and Hunter (1963). An alternative range from 0.5 to 1.0 is given by Gray (2000) taking as a compromise of the friction effect and lateral dispersion. The length of the bars should obey restrict rules to ensure that the reflected wave will not interfere with the measurement of the incident wave. By considering the time consuming of numerical simulation, the lengths of the bars should be as short as possible. To eliminate the wave disturbance of the reflected wave from the free end boundary, the viscous boundary is performed, as shown in Fig. 9. Therefore, the length of the incident bar is taken as 1500 mm, and the transmitted bar is designed with a length of 750 mm. The diameter (50 mm) of bars and specimen are identical with the experiment. Assuming the half period of the wave is 200 µs, the lengths chosen above allow the stress waves travelling at least ten rounds in the specimen, and thus the dynamic equilibrium state can be obviously guaranteed.

(modified from Li et al. 2018)
a Numerical modelling for SHPB test system and direct measurement on the specimen. b Generation of grain-based discrete element model and its mineral compositions. c Micro-mechanism of transgranular contacts behaviour. Left tensile failure perpendicular to the contact, right shear slip parallel to the contact. d Micro-mechanism of Intergranular contacts behaviour. Left tensile failure perpendicular to the contact, right shear slip parallel to the contact
3.2 Numerical Model Setup
As discussed above, the SHPB apparatus model is established with identical geometries by considering both the realistic configuration and computational efficiency. The incident and transmitted bars are modelled as 1500 and 750 mm long, respectively. The diameter is determined by the experimental condition and the value is set as 50 mm, as shown in Fig. 9. The micro-parameters of contacts in the bars are calibrated referring to Table 3. Based on the grain geometric properties in Table 1, a specimen with a width 50 mm and height 50 mm is modelled, as shown in Fig. 9a. The radius of particles ranges from 0.08 to 0.13 mm with the normal random distribution, which is small enough to minimise the size effect on results. The total number of particles in a specimen is 84,675. The geometry of mineral grains is realistically mapped from the thin section of the sample and the modelled grain number is around 1647. Five measurement boxes are assigned at points A (375 mm, 0), B (750 mm, 0), C (1125 mm, 0), D (1500 mm, 0), and E (1875 mm, 0) to measure the stress and strain-rate changes induced by stress wave. Unlike laboratory tests, numerical simulation can directly detect the stress and strain fields by measurement circles mounted on the specimen, as shown in Fig. 9a. The average stress and strain fields are computed by 4 × 4 measurement circles directly; therefore, the strain localisation after the peak failure can also be characterised. The geometry structure and grain distribution are shown in Fig. 9b. The physical models described in the specimen included two structures. Particle behaviours in the grains are shown in Fig. 10c, and grain behaviours between different mineral grains are shown in Fig. 10d. The grain structures are clustered by a number of particle structures, and the grain elastic behaviour is determined by the assembly of particles.


Calibration of the simulated SHPB results using GB-DEM at two impact velocities of v = 10.0 m/s and v = 50.0 m/s. a Wave propagation within the modelled bars and specimen at different time. b Indirect stress equilibrium using the three-wave method. c Normalized stress factor distribution of the specimen. d Direct stress equilibrium at the ends of the specimen. e Lateral inertia stress and strain rates within the specimen
3.3 Validation of SHPB Technique
The premise of constant strain-rate loading is the specimen in an equilibrium state. It can be seen from Fig. 10a that time t = 0 corresponds to the moment the striker shooting from the gas gun. Then, stress wave propagates along the incident bar as a compressive wave resulting from the collision of the striker (from t = 35 ~ 140 µs in Fig. 10a), and stress wave velocity in the incident bar is around 5292 m/s (the wave velocity of the SHPB bar is 5200 m/s). The first round compressive wave arrives at the right end of the specimen, and the tensile wave is reflected into the incident bar at t = 283 µs. The wave propagates through the specimen and then transmits into the transmitted bar. When stress wave reaches the free boundary of the transmitted bar, it is absorbed, and the reflected wave is then secondarily reflected from the loading boundary. To evaluate the specimen stress equilibrium simulated by GB-DEM, the time-shifted incident, reflected, and transmitted wave stresses at two different impact velocities are compared in Fig. 10b. The superposition of incident wave and reflected wave σinc. + σref. agrees well with the transmitted wave σtra. as well as the directly measured stress σspecimen when the impact velocity is v = 10 m/s. During wave propagation in the specimen, the platform on the reflected wave indicates that constant strain rate is guaranteed. The maximum unbalance stress σinc. + σref + σtra. is 8.7 MPa. The results for v = 50 m/s have an unacceptable loading condition, though the superimposed wave is identical to transmitted wave, as shown in Fig. 10b. The maximum stress difference in the specimen exceeds 84 MPa, and thus, the assumption of stress equilibrium cannot be ensured when the strain rate is too high. The normalized stress distribution after the balanced process is denoted as ξ = (σmax − σ)/(σmax − σmin), as plotted in Fig. 10c. σmax and σmin are the maximum and minimum stress values in the specimen, respectively. The uniform stress distribution is destroyed when the loading velocity is high enough. Direct evaluation of the historical stress state in the specimen, as shown in Fig. 10d, is available with the aid of simulation. The total loading process is ttur = 130 µs and the first ‘ring-up’ duration under equilibrium loading is 36 µs. The stress equilibrium factor is computed by η = 2(σinc. − σtra.)/(σinc. + σtra.), and the oscillation error within 8% ensures the stress equilibrium within the specimen. The corresponding changes, as listed in Fig. 10d, for the impact velocity of v = 50 m/s indicate 24% error existed when the stress wave reverberation has been finished. The assumption of 1D stress wave propagation is broken, as shown in Fig. 10e. The stress σyy induced by lateral inertia movement increases from − 28.3 to 64.6 MPa as the impact velocity changed from v = 10 m/s to v = 50 m/s. This change is relevant to the loss of the constant strain-rate loading platform, as shown in Fig. 10e. These results guarantee that the reasonability of the SHPB technique at higher strain rates (i.e., \(\dot {\varepsilon } \geqslant\)400/s with the sample length is 50 mm) is questionable, and another condition, decreasing the studied specimen length, needs to be obtained. Overall, the proposed methods have the capabilities to satisfy fundamental assumptions for the SHPB technique within the certain range.
4 Dynamic Mechanical Behaviour and Micro-fracturing Process
4.1 Dynamic Stress–Strain Curves
Four kinds of rocks (i.e., granite, sandstone, dolomite, and limestone) with different grain-scale properties are conducted using the SHPB, as shown in Fig. 11. Dynamic stress–strain curves are categorised into two groups (Class I and Class II) by incorporating with fracturing characteristics. Class I failure has a significant unloading stage in association with stored elastic energy release. These samples are loaded up to peak stresses surrounding static UCS at lower strain rates and the sample generally did not fail or roughly fractured with few fragments. Energy consumption is also limited, and the input work by the striker impacting does not exceed the critical fracturing energy consumed for dynamic fragmentation. The transition from Class I to Class II is governed by the external input work. The samples have a continuous transition from intact → fractured or fragmented → pulverised as the increase of input energy, in particular, when the strain rate is much higher exceeding the bearable capacity of the samples, as shown in Fig. 12d. Pulverisation results in energy-releasing in the form of frictional sliding, kinetic and heat released outside environment. These unrecoverable dissipations drive successive deformation, and thus, the stress–strain curves behave as Class II.

Experimental compressive stress–strain curves at different strain rates for various rock materials. a Typical class I dynamic loading. b Typical class II dynamic loading

Stress, strain, and strain rate as functions of time for two typical impact results: Class I and Class II. a Stress, strain, and strain-rate changes with time at lower strain-rate loading (Class I impact loading), red curve stress, blue curve strain, and black curve strain rate. b Stress–strain relation of the Class I impact loading and the hysteresis loop resulting from recovery elastic strain energy. c Typical sample failure of the Class I impact loading. d Stress, strain, and strain-rate changes with time at higher strain-rate loading (Class II impact loading), red curve stress, blue curve strain, and black curve strain rate. e Stress–strain relation of the Class II impact loading. f Typical sample failure of the Class II impact loading. (Color figure online)
Mechanical Class I failure (Fig. 12a–c) results in locally splitting fragments when the applied stress is 107.6 MPa which is below static UCS. The peak strain rate is 42.3 s− 1 occurred before the stress reaches the peak value. Then, this value decreases to the negative which results in a recovery of strain. These observations concluded that the Class I loading has no constant strain-rate phase, since the sample is not in a failure state. The loading has an elastic energy release which behaves as the recovery of the elastic strain, the permanent deformation is formed by the damage of the sample, and the hysteresis loop represents the dissipated energy during the loading process. The failure of Class I is the result of the tensile stress reflected from the free boundary and the failure strength commonly below the static UCS. Hence, this failure usually occurs at low strain-rate impacts. The fragment shape is intact, single fractured, or slightly fragmented induced by the lateral splitting.
Class II failure, as shown in Fig. 12d–f, is characterised by the significant residual strain as well as pulverised fragments. The peak dynamic strength is 238.4 MPa, and the strain rate is 96.4/s. These characteristics show that the sample has a constant strain-rate loading phase preceding the peak point and maintaining a permanent deformation after its complete breakage. The failure strength exceeds the static UCS, and the strain rate is relevantly high. Failure shape transits from fragment to pulverisation resulted from huge energy transform from strain energy to dissipated energy such as slipping energy and kinetic energy. Class II is a result of HSR loading or successively dynamic impacts.
Table 4 lists the strain rate, fragmentation, and dynamic strength results from experiment and numerical simulation at similar strain rates. It shows that the failure degree increases rapidly with increasing strain rate with the range of \(\dot {\varepsilon }\)= 23.8–102.7/s. At low strain rates, the cracks propagate along the loading direction with lateral splitting near the free boundaries. The number of fragments dramatically increases from the single fractured sample to the pulverised sample. The dynamic failure strength corresponding to similar strain rates are comparable.
To verify the strain-rate dependency of rocks, numerical results are explored under different impact velocities (Fig. 13). The failure strength exhibits a general increase with the increase of strain rate. The elastic modulus, which is the slope of a linear fit to the rising portion between 10 and 90% of peak strength, is independent of strain rate. The strain rate (Fig. 13b) under the satisfying condition of stress equilibrium ranges from 47.6 to 334.2/s (listed in Table 5).

a Numerically simulated stress strain behaviours of different strain rates. b Directly measured strain-rate change within the specimen at different impact velocities
The simulated result at the velocity of v = 5.0 m/s (Fig. 14a) exhibits Class I mechanical behaviour, but Fig. 14b at the velocity of v = 10.0 m/s reveals Class II behaviours. Figure 14 outlines the stress, stiffness degradation, Poisson’s ratio, acoustic emission, volumetric strain, and crack strain changes with the strains. The volumetric strain is defined as εv = εa + 2εl and the crack strain is εc = εv − (1 − 2υ)σ/E, where E and υ are the elastic modulus and Poisson’s ratio of the material and σ is the stress applied on the specimen. The crack initiation stress σci is marked as the beginning point of the crack initiation induced by the external loading force and the crack damage stress σcd corresponding to the unstable fracturing of the specimen under successive loading (Zhang et al. 2017a, b). The Class I failure has a peak strength σdyn = 163 MPa at the strain rate of \(\dot {\varepsilon }\) = 36.7 s− 1. Elastic energy release leads to strain recovery restricts and further fracturing of the specimen. This recovery does not occur on the lateral strain εyy due to the axial splitting. Different results revealed for Class II loading are shown in Fig. 14b. Pulverised failure results in unrecoverable fracturing and successive energy dissipation.

Comparison of the macromechanical behaviour and micro-fracturing characteristic under different strain rates. a v = 5.0 m/s. b v = 10.0 m/s
4.2 Dynamic Damage Stress Thresholds
Damage stress thresholds, as shown in Fig. 14, are summarised in Table 5 to characterise the microcracks’ fracturing-induced macro-dynamic responses. The crack initiation stress σci is identified according to the intensity of initiated cracks in the specimen which are characterised by the AE frequency. In GB-DEM, each bond broken is considered as an AE event. This stress threshold increases from 88.6 to 123.4 MPa as strain rate increases (Fig. 15a). This static value is 66.3 MPa. It is known that fracturing toughness is enhanced under dynamic loading. Based on the fracturing process in Sect. 4.1, most microcracks generated at the period surrounding the point A are intergranular tensile cracks resulted from initial defects of mineral grains. Therefore, the Mode-I fracture toughness is commonly determined by the initially defected state of the sample and the sustainable capacity of grain boundaries. Another problem should be noted is that the equilibrium state in the sample is just roughly reached. Therefore, the unbalanced stress is may contributes to a fictitious enhancement of σci. An opposite result is observed for normalized crack initiation stress σci/σdyn, as presented in Fig. 15b. The normalized crack initiation stress ranges from 0.38 to 0.52 at a roughly linear increasing. It indicates that the crack initiation stress σci has less dependency on strain rate in comparison with the peak failure strength. The crack damage stress σcd is the point corresponding to the maximum crack strain which indicates the start of subsequently unstable fracturing. First, this threshold is heavily enhanced from 117.3 MPa (static strength) to 260.45 MPa (\(\dot {\varepsilon }\) = 334.2 s− 1) with respect to the increase of strain rate. According to microcracks’ distribution presented in Fig. 16, transgranular tensile cracks dominate the macrocracks’ coalescence, and in turn influence this stress threshold. Shear faults resulted from the grain pulverisation consumes large strain energy, and these faults also increase the friction sliding between grains. The macrofailure transits from the splitting dominated fracturing to sliding dominated pulverisation, which increases σcd, and the range of σcd/σdyn is 0.82–0.95.

Stress thresholds change with respect to strain rates. a Stress threshold \({\sigma _{{\text{ci}}}},{\sigma _{{\text{cd}}}}\). b Normalized stress thresholds \({\sigma _{{\text{ci}}}}/{\sigma _{{\text{dyn}}}},{\sigma _{{\text{cd}}}}/{\sigma _{{\text{dyn}}}}\).The static results are listed in the grey box. The highlighted intervals (blue and pink) indicate the slightly fractured or fragmented strain rate (40–130 s− 1) and pulverised strain rate (160–340 s− 1). (Color figure online)

Various variables, stress (black line with symbols), damage (blue line with symbols), strain rate (yellow line with symbols), dissipated energy density (pink line with symbols) and acoustic emission counts (grey bars) changes as a function of time at two strain rates. a v = 5.0 m/s. b v = 10.0 m/s. (Color figure online)
4.3 Micro-fracturing Process of Rocks
The micro-fracturing processes after two classic loadings are compared in Figs. 16 and 17. The loading processes are divided into six stages by five points (A, B, C, D, and E) according to fracturing characteristics of the specimen response. Point A is the beginning of microcracks’ generation corresponding to the crack initiation stress σci. Point B ends the stable fracturing process and corresponding cracks begin to coalesce and interact. Point B is also labelled as the crack damage threshold σcd preceding the peak failure point C. Point D, as the un-equilibrium point of constant strain-rate loading, is labelled as the accelerating fracturing of the specimen. Point E represents the final failure state after a complete impact loading. According to the cracks’ fracturing and microcracks’ orientation distribution in Figs. 16 and 17, it can be summarised that:

Comparison of fracture initiation and propagation process at different stages for two classic loading types. a, c Grain-based DEM simulated cracks’ distribution and propagation at impact velocity v = 5.0 m/s and v = 10.0 m/s. b, d Corresponding crack orientation in a and c. Different columns represent different stages A, B, C, D, and E plotted in Fig. 18. Black intergranular tensile crack, blue intergranular shear crack, orange transgranular tensile crack, and green transgranular shear crack. (Color figure online)

Damage characteristics for rocks at different strain rates. a Damage variable and dissipated energy density changes as function of strain. b Damage threshold with respect to strain rate. c Damage evolutions at different strain rates. d Rate dependency of the damage evolution parameters in c
-
1.
Initial microcracks are randomly generated in the specimen after the first reverberation of the stress (the strain rate is in constant in Fig. 16b). These crack orientations are limited to the ranges of \(0 \leqslant \theta <{30^ \circ },{150^ \circ } \leqslant \theta <{180^ \circ }\), which are parallel to the loading direction. Most cracks are intergranular tensile cracks resulted from local stress concentrations at the tip of grain boundaries.
-
2.
Macrocracks initiated from Point B result from the interaction of microcracks. Most fractures are generated from the boundaries, and interacted cracks are not the coalescence of intergranular cracks rather than the clustering of transgranular cracks on the macrocrack paths. Therefore, the orientation of the cracks gradually transits to the shear band and the angle range is increased. This point also results in a nonlinear increase of the damage variable and dramatically outbreak of acoustic emissions.
-
3.
The peak stress point corresponds to the maximum frequency of acoustic emissions and macro cracks’ propagation through the specimen. Meanwhile, the dissipated energy density in Class II rapidly increases resulted from unrecoverable macro fracturing sliding. This change is under a linearly increasing within a limited range in Class I.
-
4.
The un-equilibrium stress generates after the peak failure. The frequency of the microcracks decreased, and these cracks are clustered in the macro faults as types of transgranular cracks. The cracks’ orientation distribution has become more homogeneous.
-
5.
Unloading after the peak failure results in further axial splitting, and finally, the specimen is fractured to fragments due to the coalescence of the nearby macrofractures in Class I. In addition, further macrofault sliding and grains pulverisation are observed in the Class II failure. Most fragmentations occurred in the post-peak stage in association with stress unloading and strain energy dissipation.
4.4 Damage Modelling and Evolution Process
Damage characterisation subject to dynamic loading has not been explored due to the limitation of measurement techniques. Without loss of generality, the damage model is developed as the cumulative area loss of the final failure surface as
where \(N\)and \(n\) are the total crack number at ultimate failure and current crack number cumulated, respectively. \({r_i}\) and \({l_i}\) are the radius and length of the ith crack. The moment when the sample completely loses the sustainability corresponds to the damage state ω = 1.0. The modelled sample is treated as initially continuous, and thus, the initial damage state is ω = 0. The damage change from 0.0 to 1.0 as a function of strain is mobilised as a damage evolution equation (Fig. 18a). The proposed damage evolutions are characterised by the loading classes: Class I and Class II. In Class II tests, the ultimate failure strain shows dramatically increase with strain rate. This result widens the shape of the damage evolution curve. Several critical points are founded in the damage evolutions characterising the transit tendencies of the damage variable. One point among these, marked as the damage threshold ωcd, is mobilised at the beginning of dramatically increase for dissipated energy density. The corresponded damage threshold is presented in Fig. 18b. It is found that this damage threshold increases successively from 0.19 to 0.54 when the strain rate is increased from 47.6 to 334.2 s− 1. However, this value in the static test is only about 0.14. In dynamic tests, this threshold is crucial to represent the unstable dynamic fracturing of the material, and thus, it is commonly used as the critical threshold controlling the long-term sustainability after HSR loading. Therefore, this approximately linear increase in Fig. 18b reveals that the fact the long-term strength is synchronously enhanced with dynamic peak strength. Moreover, this characteristic also increases the reliability redundancy based on current design standards.
To further characterise the dynamic damage evolutions, the Weibull distribution is built and the cumulative distribution function (CDF) is described as
where \(a\) and \(b\) are two parameters determine the shape of the function. The parameter \(a\) determines the scale of the distribution, and the parameter \(b\) affects the shape of the distribution. Numerical results can be regressed by Eq. 2, and corresponding parameters are presented in Fig. 18d. The exponential decrease of the parameter \(b\) from 8.79 to 2.64 reveals more flat the distribution is. Since this description is in the strain space, it does not mean the fracturing duration at higher strain rates consuming more time. In contrary to the parameter \(b\), the parameter \(a\) increases linearly from 3.08 × 10− 3 to 5.6 × 10− 3. Therefore, the ultimate fracturing strain is reduced at the low strain rate.
4.5 Criteria of Pulverisation and Dynamic Fragmentation
Microscale fracturing characteristics of rocks subject to dynamic loading are obvious (Fig. 19). The sample is easily impacted to small pieces at high strain rates in the laboratory. Fragmentation analysis can be only collected before and after the failure states of the sample, and thus, the fragmentation process capturing seems to be unavailable. Figure 19 shows that shear bands (Fig. 19c) result in macrosliding between dominant fragments, and these bands are composed of transgranular and intergranular cracks’ clustering which consuming huge energy. Unloading induced macrotensile fracture (Fig. 19b) successively breaks these dominant fragments into small pieces, and the stored elastic strain energy is then transformed into the kinetic energy of fragments. That is to explain why the kinetic energy is dramatically increased when the strain rate is improved. Most microcracks appear on the direction parallel to wave propagation (Fig. 19d), and these cracks are dominated by transgranular tensile cracks which are far away from the shear bands. In general, these parallel cracks are the results of axial splitting induced by reflected tensile waves between grain boundaries. Another typical fracturing feature is the fracture network around grains by intergranular tensile cracks, as shown in Fig. 19e, f. These fractures are more likely to be generated by large grain rotations. More specifically, the macrocracks result from grain pulverisation, as shown in Fig. 19g. These cracks are commonly existed on the shear bands and directly lead to macro pulverisation phenomenon. Apparently, this type of failure takes away most sliding energy but results in less residual kinetic energy.

(modified from Aben et al. 2016). (Color figure online)
a Microcracks’ distribution of the specimen at an impact velocity v = 10 m/s and its comparison with relevant SEM scan results. a Full cracks’ distribution within the specimen. Black intergranular tensile crack, blue intergranular shear crack, orange transgranular tensile crack, and green transgranular shear crack. b, c Close-up of the boxed in areas (a). d Parallel (top) and cross-polarized (bottom) images of a fracture zone running through minerals (modified after Aben et al. 2016). e, f Overview images and closeups of finely comminuted zones with grain sizes below 10 µm. The cross-polarized light images show an in situ “explosion” without rotation of the grains (modified from Aben et al. 2016). g SEM images that zoom in from left to right on a highly pulverised region with particles that are smaller than 1 µm
In association with previously described results, two mechanical classes (class I and class II) can be observed in SHPB tests. The Class I only existed when strain rate is low, and the unloading process is associated with huge elastic strain energy release. The failure state is characterised by single fracturing or several fragments parallel to the loading direction. In contrary to Class I, Class II is subjected to higher strain rate with all loss of cohesion. This catastrophic failure results in sample pulverisation. From the theoretical analysis, it is agreed that macro behaviours are determined by the transition of the micro-fracturing patterns. In association with the dynamic mechanical classes, the fracturing patterns can be categorised into two main forms, as shown in Fig. 20a–j. The transition stages presented in Fig. 20f–i show the successive inheritance from the pattern I to the pattern II. It can be concluded that: (a) Class I loading induces axial splitting fracturing adjacent to the free boundaries of the specimen as a result of micro tensile failures. This fracturing is coalesced to the main fracture surface and then results in the ultimate fragmentation. Since the fracturing toughness of intergranular contacts is much less than that of transgranular contacts, some branching cracks occur at the tip of the grain boundary (corresponding laboratory observation shown in Fig. 20e). The lengths of these branching cracks are determined by the subsequent energy input. (b) Once the external energy is capable of driving the branching cracks’ propagation, these secondary cracks nucleate into the fracture surface, and localised fragments are generated. This fragmentation is a classical failure characterisation of dynamic loading which consumes higher energy and in turns results in macro behaviours enhancements. (c) Once the external energy is high enough, the friction bands surrounding the fracture surface are induced by the large kinetic energy release of the particles. This kind of failure aims to transform the strain energy stored in contacts to friction energy which eventually leads to large deformation of the specimen.

(modified from Zhang et al. 2000)
Microcrack rupture difference at three different strain rates (the corresponding velocities of the three rows are v = 4.2 m/s, v = 5.0 m/s, and v = 10.0 m/s). The first column is the results of microcracks’ distribution, and the second column is the main fractures existed in the specimen and the sketches of the crack category. The third column is the finalized specimen fragment state and the fourth column is the microphotographs of crack damaging on the section of specimen at dynamic fracture toughness \(\dot {K}=1.79 \times {10^5}\) MPa m1/2
4.6 Microcracks’ fracturing transition
This section explores the fracturing transition from intergranular fracturing (rough surfaces) to transgranular fracturing of rocks under dynamic fragmentation. Figure 21 shows typical fracture surfaces at strain rates of 42.3/s (Fig. 21a, b) and 96.4/s (Fig. 21c, d). Fractures are rough and grain profiles are clearly reserved at the lower strain rate. Intergranular tensile fracturing is commonly observed, and this low-toughness rupture creates smooth surfaces along grain boundaries. The rupture surface of samples at the strain rate of 96.4/s with the same magnification seems flatter. The newly generated fractures are roughly sheared and the surfaces are covered by particulate matters as consequences of local shear pulverisation. More energy drives pervasively pulverised cracks surrounding the shear bands, and in turn, this transition results in rate dependency of failure strength.

Scanning electron images of fracture surface under different strain rates. a, b Evidences of intergranular fractures at strain rate of 42.3/s. c, d SEM images of fracture surface at strain rate of 96.4/s
The fractured microcracks can be divided into Mode-I fracturing (normal tensile broken) and Mode-II fracturing (tangential shear broken). According to the fractured contact properties, these cracks can be further classified as intergranular tensile crack (IG: tension), intergranular shear crack (IG: shear), transgranular tensile crack (TG: tension), and transgranular shear crack (TG: shear). It is widely accepted that grain boundary fracturing is the dominant failure in the static test of brittle materials. These conclusions can also be observed in dynamic tests (Fig. 22). At low strain rates (\(\dot {\varepsilon } \leqslant\) 100/s), especially for Class I loading, the intergranular tensile crack area has a dominant influence on the specimen fracturing with a composition ratio of more than 57.6%. This value gradually decreases to 29.2% as strain rate increases. Meanwhile, the transgranular tensile crack, which resulted in grain pulverisation dramatically, increases and shows dominant composition at higher strain rates. Shear cracks (either intergranular or transgranular) seem to present similar behaviours, but the overall composition ratios are no more than 10%. From the transition of fracturing microcrack modes, it is found that the strain-rate dependency is related to the dominance of grain pulverisation.

Different crack types area and composition ratio with respect to various strain rates. a Crack area. b Crack composition ratio
4.7 Scaling of the Rate-Dependent Strength
The dynamic increasing factor (DIF) [i.e., the ratio of dynamic UCS to static UCS (DIF = σdyn/σsta)] is widely used to evaluate the rate dependency for rock materials. The previous studies show that DIF has a nonlinear increase in the strain rate at the full scope (\({10^{ - 5}} \leqslant \dot {\varepsilon } \leqslant {10^6}\;{{\text{s}}^{ - 1}}\)) for quasi-brittle materials. This change includes slightly linear enhancement at low strain rates (\(\dot {\varepsilon } \leqslant\)10/s), but rapidly increases at HSR (\({10^0} \leqslant \dot {\varepsilon } \leqslant {10^5}\;{{\text{s}}^{ - 1}}\)) and rate independence at ultra-high strain rate (\({10^5}\;{{\text{s}}^{ - 1}} \leqslant \dot {\varepsilon }\)). The low strain-rate threshold \({\dot {\varepsilon }_{{\text{lc}}}}\) divides the quasi-static fracturing and dynamic fracturing. This dynamic fracturing transits from single fractured → fragmented → pulverised, and then turns to the thermal fluid when the strain rate exceeds the upper threshold \({\dot {\varepsilon }_{{\text{uc}}}}\) which is also marked as the point of Hugoniot elastic limit (HEL) (Zhang et al. 2017a, b). Some empirical laws are developed in Table 6 for quasi-brittle materials such as rock and concrete. These laws can be categorised into one-parameter type (e.g., Kimberley model), two-parameter type (e.g., exponential model), three-parameter type (e.g., Olsson model and Grady model), and four-parameter type (e.g., Johnson model) according to parameters needed to characterise the strain-rate effect in the range of \({10^{ - 5}} \leqslant \dot {\varepsilon } \leqslant {10^3}\;{{\text{s}}^{ - 1}}\). Experimental and numerical results are plotted in Fig. 23a for comparing the validity of GB-DEM in rock dynamic fragmentation modelling. Numerical DIF is plotted as a function of strain rate, as shown in Fig. 23b. Existed empirical laws are performed to fit the simulated results. The results show that the change of DIF can be divided into slight rate dependence and strong rate dependence. The classical laws (e.g., Johnson model, Grady model and Olsson model) are not continuous for fully describing dynamic behaviours. The Olsson model has advantages of less parameter but poor ability to characterise the intermediate strain-rate behaviours. The Kimberly model gives a better match on the experimental and computational results (with a correlation coefficient of above 0.7). The parameter \({\dot {\varepsilon }_{\text{s}}}\) is defined as characteristic strain rate as (Kimberley et al. 2013)

(data from Green and Perkins 1968; Kumar 1968; Perkins et al. 1970; Howe et al. 1974; Goldsmith et al. 1976; Lankford 1976; Lindholm et al. 1974; Klepaczko 1990; Olsson 1991; Zhao et al. 1999; Frew et al. 2001; Sylven et al. 2004; Li et al. 2005; Cai et al. 2007; Xia et al. 2008; Doan and Garry 2009; Doan and Billi 2011; Wang and Tonon 2011; Kimberley and Ramesh 2011; Kimberley et al. 2013; Zhang and Zhao 2013; Chakraborty et al. 2016). (Color figure online)
a Comparisons of numerical results and experimental results. b Numerically simulated dynamic increasing factor for rocks by GB-DEM and its empirical laws. Blue scatters are simulated results at intermediate strain rates by conventional static loading test. Grey scatters are simulated results at high strain rate by SHPB test. b Summary of the dynamic increase factor for rocks as a function of strain rates
where \({\upsilon _{\text{c}}}\)is the limiting crack growth velocity (m/s), and \({K_{{\text{IC}}}}\) and Es are the mode-I fracture toughness (\({\text{Pa}}\sqrt m\)) and elastic modulus (Pa), respectively. \(\bar {s}\) is the average flaw size (m) and \(\eta\) is the areal flaw density (m− 2). The term \(\alpha\) is a dimensionless constant with a value of 2.4. This characteristic strain rate corresponds to the critical point that the DIF = 2.0 regardless of the power parameter of the scaling law. In Kimberly’s model, the rate increase factor β is limited to 2/3. This factor is found to be reduced to 1/3 (Birkimer 1970; Grady and Hollenbach 1979), 0.05 (Lipkin and Jones 1979), 0.19 (Grady and Lipkin 1980), and 0.25 (Grady and Hollenbach 1979) with different experimental methods. In this study, we use the extended model in the form of \({\text{DIF}}=1+{\left( {\frac{{\dot {\varepsilon }}}{{{{\dot {\varepsilon }}_{\text{s}}}}}} \right)^\beta }\) to characterise the strain-rate dependency. The regressed result presented as \({\text{DIF}}=1+{\left( {\frac{{\dot {\varepsilon }}}{{154}}} \right)^{0.54}}\) has the best regression value R2 = 0.96 and the rate-insensitive response at intermediate strain rate can also be well presented at the same time.
With a focus on the characteristic strain-rate change for different rocks, a summary of the DIF at different strain rates is presented in Fig. 23c. The regressed results for some geological materials are presented in Table 7. The values listed in Table 7 provide useful database for estimating the strain-rate effect of different materials.
5 Conclusion
In this study, we performed a realistic modelling of the micro-heterogeneity for rocks using the grain-based discrete element method (GB-DEM). With the aid of the digital image processing, the GB-DEM can characterise inter- and intra-granular fractures of crystalline rocks from the viewpoint of realistic microstructure distribution. Smoothjoint interfaces and rectangularly distributed bars are proposed to eliminate end frictions and wave dispersions. The results of stress equilibrium factor change, nominalised stress factor distribution, and lateral inertia stress indicate that the pre-requisites of the SHPB simulations using GB-DEM can be guaranteed. Dynamic compression tests on granite at different strain rates are conducted to validate numerical simulation. Two classical mechanical types (Class I and Class II) are observed as strain rate from 23.8 to 102.7/s in experiments. The intact, single fractured or lightly fragmented sample at the low strain-rate experiences loading and unloading process in association with elastic strain energy release. More intensive dynamic loading pulverises the sample, and most energy is reserved in the forms of friction sliding energy and residual kinetic energy.
Two damage stress thresholds (σci and σcd) show a similar dependency on the basis of failure behaviours such as crack volumetric strain change and acoustic emission (AE) fracturing. The normalized crack initiation stress σci is reduced to 0.38 when the strain rate reaches 350 s− 1. Damage evolution under dynamic loading is distinctively different from that under static loading. Under dynamic loading, the Weibull distribution exhibits a broader shape (shape parameter \(b\), 2.64–8.79) and a larger average scale (scale parameter \(a\), 3.08–5.6 × 10− 3). The transition of dominated microcracks from intergranular to transgranular fracturing results in different macrofailure characteristics. The single fractured or lightly fragmented samples are generated by the fracture surface in association with branching cracks which are dominated by intergranular fracturing. In contrary, pervasively damaged rocks are the results of transgranular fractures clustering surrounding the fracture surface and in turn form the substantial shear bands.
The simulations are further conducted at a higher strain-rate range (\(47.6 \leqslant \dot {\varepsilon } \leqslant 334.2\) s− 1). The results reveal that granite is significantly dependent on strain rate. The dynamic increase factor behaves first linear increase until the intermediate strain rate and then dramatically increased to 2.5 when the strain rate exceeds the maximum value \(\dot {\varepsilon }=334.2\) s− 1. A novel scaling law has a continuous and smooth description of this behaviour from low to high strain rates, and the characteristic strain rate is 154 s− 1.
References
Aben FM, Doan ML, Mitchell TM et al (2016) Dynamic fracturing by successive coseismic loadings leads to pulverisation in active fault zones. J Geophys Res Solid Earth 121(4):2338–2360
Aben FM, Doan ML, Gratier JP et al (2017) High strain rate deformation of porous sandstone and the asymmetry of earthquake damage in shallow fault zones. Earth Planet Sci Lett 463:81–91
Bahrani N, Kaiser PK (2017) Estimation of confined peak strength of crack-damaged rocks. Rock Mech Rock Eng 50(2):309–326
Bahrani N, Kaiser PK, Valley B (2014) Distinct element method simulation of an analogue for a highly interlocked, non-persistently jointed rockmass. Int J Rock Mech Min Sci 71:117–130
Baranowski P, Gieleta R, Malachowski J et al (2014) Split Hopkinson pressure bar impulse experimental measurement with numerical validation. Metrol Meas Syst 21(1):47–58
Birkimer DL (1970) A possible fracture criterion for the dynamic tensile strength of rock[C]//The 12th US Symposium on Rock Mechanics (USRMS). American Rock Mechanics Association, Alexandria
Brara A, Camborde F, Klepaczko JR et al (2001) Experimental and numerical study of concrete at high strain rates in tension. Mech Mater 33(1):33–45
Cai M, Kaiser PK, Suorineni F et al (2007) A study on the dynamic behavior of the Meuse/Haute-Marne argillite. Phys Chem Earth Parts A/B/C 32(8):907–916
Chakraborty T, Mishra S, Loukus J et al (2016) Characterization of three Himalayan rocks using a split Hopkinson pressure bar. Int J Rock Mech Min Sci 85:112–118
Chen R, Xia K, Dai F et al (2009) Determination of dynamic fracture parameters using a semi-circular bend technique in split Hopkinson pressure bar testing. Eng Fract Mech 76(9):1268–1276
Cheng Z, Liu Y, Zhao J et al (2018) Numerical simulation of crack propagation and branching in functionally graded materials using peridynamic modeling. Eng Fract Mech 191:13–32
Christianson M, Board M, Rigby D (2006) UDEC simulation of triaxial testing of lithophysal tuff[C]//Golden Rocks 2006, The 41st US Symposium on Rock Mechanics (USRMS). American Rock Mechanics Association, Alexandria
Comite Euro-International du Beton (1993) CEB-FIP model code 1990. Redwood Books, Trowbridge
Cundall PA, Strack ODL (1979) A discrete numerical model for granular assemblies. Geotechnique 29(1):47–65
Dai F, Xia KW (2013) Laboratory measurements of the rate dependence of the fracture toughness anisotropy of Barre granite. Int J Rock Mech Min Sci 60:57–65
Davies EDH, Hunter SC (1963) The dynamic compression testing of solids by the method of the split Hopkinson pressure bar. J Mech Phys Solids 11(3):155–179
Doan ML, Billi A (2011) High strain rate damage of Carrara marble. Geophys Res Lett 38(19)
Doan ML, Gary G (2009) Rock pulverisation at high strain rate near the San Andreas fault. Nat Geosci 2(10):709
Donze FV, Magnier SA, Daudeville L et al (1999) Numerical study of compressive behavior of concrete at high strain rates. J Eng Mech 125(10):1154–1163
Fang X, Xu J (2016) A modified overstress model to simulate dynamic split tensile tests and its experimental validation. Rock Mech Rock Eng 49(9):3823–3828
Farahmand K, Diederichs MS (2016) Hydro-mechanical effects of pore pressure on deformability and fracture strength of rock: a numerical modeling study[C]//50th US Rock Mechanics/Geomechanics Symposium. American Rock Mechanics Association, Alexandria
Fondriest M, Doan ML, Aben F et al (2017) Static versus dynamic fracturing in shallow carbonate fault zones. Earth Planet Sci Lett 461:8–19
French BM (1998) Traces of catastrophe: a handbook of shock-metamorphic effects in terrestrial meteorite impact structures. Technical Report, LPI-Contrib-954
Frew DJ, Forrestal MJ, Chen W (2001) A split Hopkinson pressure bar technique to determine compressive stress–strain data for rock materials. Exp Mech 41(1):40–46
Gama BA, Lopatnikov SL, Gillespie JW (2004) Hopkinson bar experimental technique: a critical review. Appl Mech Rev 57(4):223–250
Goldsmith W, Sackman JL, Ewerts C (1976) Static and dynamic fracture strength of Barre granite[C]. Int J Rock Mech Min Sci Geomech Abstr Pergamon 13(11):303–309
Grady DE, Hollenbach RE (1979) Dynamic fracture strength of rock. Geophys Res Lett 6(2):73–76
Grady DE, Lipkin J (1980) Criteria for impulsive rock fracture. Geophys Res Lett 7(4):255–258
Gray GT III (2000) Classic split-Hopkinson pressure bar testing. ASM Handb Mech Test Eval 8:462–476
Green SJ, Perkins RD (1968) Uniaxial compression tests at varying strain rates on three geologic materials[C]//The 10th US Symposium on Rock Mechanics (USRMS). American Rock Mechanics Association, Alexandria
Gu X, Zhang Q, Huang D et al (2016) Wave dispersion analysis and simulation method for concrete SHPB test in peridynamics. Eng Fract Mech 160:124–137
Gui YL, Bui HH, Kodikara J et al (2016) Modelling the dynamic failure of brittle rocks using a hybrid continuum-discrete element method with a mixed-mode cohesive fracture model. Int J Impact Eng 87:146–155
Ha YD, Lee J, Hong JW (2015) Fracturing patterns of rock-like materials in compression captured with peridynamics. Eng Fract Mech 144:176–193
Hajiabdolmajid V, Kaiser P (2003) Brittleness of rock and stability assessment in hard rock tunneling. Tunn Undergr Space Technol 18:35–48
Hao Y, Hao H, Zhang XH (2012) Numerical analysis of concrete material properties at high strain rate under direct tension. Int J Impact Eng 39(1):51–62
Hentz S, Daudeville L, Donzé FV (2004a) Identification and validation of a discrete element model for concrete. J Eng Mech 130(6):709–719
Hentz S, Donzé FV, Daudeville L (2004b) Discrete element modelling of concrete submitted to dynamic loading at high strain rates. Comput Struct 82(29):2509–2524
Heuze F (1990) An overview of projectile penetration into geological materials, with emphasis on rocks. In: International journal of rock mechanics and mining sciences and geomechanics abstracts, Elsevier, New York, pp 1–14
Hogan JD, Rogers RJ, Spray JG et al (2012) Dynamic fragmentation of granite for impact energies of 6-28 J. Eng Fract Mech 79:103–125
Hogan JD, Spray JG, Rogers RJ et al (2013) Dynamic fragmentation of planetary materials: ejecta length quantification and semi-analytical modelling. Int J Impact Eng 62:219–228
Hogan JD, Farbaniec L, Daphalapurkar N et al (2016) On compressive brittle fragmentation. J Am Ceram Soc 99(6):2159–2169
Horn HM, Deere DU (1962) Frictional characteristics of minerals. Geotechnique 12(4):319–335
Howe SP, Goldsmith W, Sackman JL (1974) Macroscopic static and dynamic mechanical properties of Yule marble. Exp Mech 14(9):337–346
Huang JY, Lu L, Fan D et al (2016) Heterogeneity in deformation of granular ceramics under dynamic loading. Scripta Mater 111:114–118
Johnson GR, Holmquist TJ, Beissel SR (2003) Response of aluminum nitride (including a phase change) to large strains, high strain rates, and high pressures. J Appl Phys 94(3):1639–1646
Kazerani T, Zhao J (2011) Discontinuum-based numerical modeling of rock dynamic fracturing and failure. Advances in rock dynamics and applications. CRC Press, Boca Raton, pp 291–320
Kimberley J, Ramesh KT (2011) The dynamic strength of an ordinary chondrite. Meteorit Planet Sci 46(11):1653–1669
Kimberley J, Ramesh KT, Daphalapurkar NP (2013) A scaling law for the dynamic strength of brittle solids. Acta Mater 61(9):3509–3521
Klepaczko JR (1990) Behavior of rock-like materials at high strain rates in compression. Int J Plast 6:415–432
Kolsky H (1949) An investigation of the mechanical properties of materials at very high rates of loading. Proc Phys Soc Sect B 62(11):676
Kumar A (1968) The effect of stress rate and temperature on the strength of basalt and granite. Geophysics 33(3):501–510
Lan H, Martin CD, Hu B (2010) Effect of heterogeneity of brittle rock on micromechanical extensile behavior during compression loading. J Geophys Res Solid Earth 115(B1)
Lankford J Jr (1976) Dynamic strength of oil shale. Soc Pet Eng J 16(01):17–22
Lankford J (1981) The role of tensile microfracture in the strain rate dependence of compressive strenght of fine-grained limestone—analogy with strong ceramics. Int J Rock Mech Min Sci Geomech Abstr Pergamon 18(2):173–175
Lankford J, Blanchard CR (1991) Fragmentation of brittle materials at high rates of loading. J Mater Sci 26(11):3067–3072
Li QM, Meng H (2003) About the dynamic strength enhancement of concrete-like materials in a split Hopkinson pressure bar test. Int J Solids Struct 40(2):343–360
Li L, Lee PKK, Tsui Y et al (2003) Failure process of granite. Int J Geomech 3(1):84–98
Li XB, Lok TS, Zhao J (2005) Dynamic characteristics of granite subjected to intermediate loading rate. Rock Mech Rock Eng 38(1):21–39
Li XF, Li HB, Liu YQ et al (2016) Numerical simulation of rock fragmentation mechanisms subject to wedge penetration for TBMs. Tunn Undergr Space Technol 53:96–108
Li J, Konietzky H, Frühwirt T (2017) Voronoi-based DEM Simulation approach for sandstone considering grain structure and pore size. Rock Mech Rock Eng 50:2749–2761
Li XF, Li X, Li HB et al (2018) Dynamic tensile behaviours of heterogeneous rocks: the grain scale fracturing characteristics on strength and fragmentation. Int J Impact Eng 118:98–118
Liao ZY et al (2016) Determination of dynamic compressive and tensile behavior of rocks from numerical tests of split hopkinson pressure and tension bars. Rock Mech Rock Eng 49(10):3917–3934
Lin M, Kicker D, Damjanac B et al (2007) Mechanical degradation of emplacement drifts at Yucca Mountain—a modeling case study—part I: nonlithophysal rock. Int J Rock Mech Min Sci 44(3):351–367
Lindholm US, Yeakley LM, Nagy A (1974) The dynamic strength and fracture properties of dresser basalt. Int J Rock Mech Min Sci Geomech Abstr 11(5):171–191
Lipkin J, Jones AK (1979) Dynamic fracture strength of oil shale under torsional loading[C]//20th US Symposium on Rock Mechanics (USRMS). American Rock Mechanics Association, Alexandria
Liu DZ (1980) Ore-bearing rock blasting physical process. Metallurgical Industry Press, Beijing, pp 428–433
Liu Y, Sun WC, Yuan Z et al (2016) A nonlocal multiscale discrete-continuum model for predicting mechanical behavior of granular materials. Int J Numer Methods Eng 106(2):129–160
Ma GW, Wang XJ, Li QM (2010) Modeling strain rate effect of heterogeneous materials using SPH method. Rock Mech Rock Eng 43(6):763–776
Ma GW, Wang QS, Yi XW et al (2014) A modified SPH method for dynamic failure simulation of heterogeneous material. Math Probl Eng 2014:808359
Ma G, Zhang Y, Zhou W, Ng TT, Wang Q, Chen X (2018) The effect of different fracture mechanisms on impact fragmentation of brittle heterogeneous solid. Int J Impact Eng 113:132–143
Mahabadi OK, Cottrell BE, Grasselli G (2010) An example of realistic modelling of rock dynamics problems: FEM/DEM simulation of dynamic Brazilian test on Barre granite. Rock Mech Rock Eng 43(6):707–716
Mahabadi OK, Randall NX, Zong Z et al (2012) A novel approach for micro-scale characterization and modeling of geomaterials incorporating actual material heterogeneity. Geophys Res Lett 39(1)
Malvar LJ, Crawford JE (1998) Dynamic increase factors for concrete. Twenty-Eighth DDESB Seminar, Orlando
Malvar LJ, Crawford JE, Wesevich JW et al (1997) A plasticity concrete material model for DYNA3D. Int J Impact Eng 19(9–10):847–873
Mehranpour MH, Kulatilake PH (2017) Improvements for the smooth joint contact model of the particle flow code and its applications. Comput Geotech 87:163–177
Molinari JF, Gazonas G, Raghupathy R et al (2007) The cohesive element approach to dynamic fragmentation: the question of energy convergence. Int J Numer Methods Eng 69(3):484–503
Morrow CA, Moore DE, Lockner DA (2000) The effect of mineral bond strength and adsorbed water on fault gouge frictional strength. Geophys Res Lett 27(6):815–818
Nicksiar M, Martin CD (2014) Factors affecting crack initiation in low porosity crystalline rocks. Rock Mech Rock Eng 47(4):1165–1181
Olsson WA (1991) The compressive strength of tuff as a function of strain rate from 10−6 to 103/sec. Int J Rock Mech Min Sci Geomech Abstr Pergamon 28(1):115–118
Osthus D, Godinez HC, Rougier E, Srinivasan G (2018) Calibrating the stress-time curve of a combined finite-discrete element method to a Split Hopkinson Pressure Bar experiment. Int J Rock Mech Min Sci 106:278–288
Panowicz R, Janiszewski J, Traczyk M (2017) Strain measuring accuracy with splitting-beam laser extensometer technique at split Hopkinson compression bar experiment. Bull Pol Acad Sci Tech Sci 65(2):163–169
Park JW, Park C, Song JW et al (2017) Polygonal grain-based distinct element modeling for mechanical behavior of brittle rock. Int J Numer Anal Methods Geomech 41(6):880–898
Peng J, Wong LNY, Teh CI (2017) Influence of grain size heterogeneity on strength and microcracking behavior of crystalline rocks. J Geophys Res Solid Earth 122(2):1054–1073
Perkins RD, Green SJ, Friedman M (1970) Uniaxial stress behavior of porphyritic tonalite at strain rates to 103/second. In: International journal of rock mechanics and mining sciences and geomechanics Abstracts, vol 7, no 5. Pergamon
Polanco-Loria M, Hopperstad OS, Børvik T et al (2008) Numerical predictions of ballistic limits for concrete slabs using a modified version of the HJC concrete model. Int J Impact Eng 35(5):290–303
Potyondy DO, Cundall PA (2004) A bonded-particle model for rock. Int J Rock Mech Min Sci 41(8):1329–1364
Rabczuk T, Eibl J (2003) Simulation of high velocity concrete fragmentation using SPH/MLSPH. Int J Numer Methods Eng 56(10):1421–1444
Régal X, Hanus JL (2017) Experimental study of the dynamic flexural strength of concrete. Exp Mech 57(3):427–442
Ren B, Li S (2012) Modeling and simulation of large-scale ductile fracture in plates and shells. Int J Solids Struct 49(18):2373–2393
Riedel W, Thoma K, Hiermaier S et al (1999) Penetration of reinforced concrete by BETA-B-500 numerical analysis using a new macroscopic concrete model for hydrocodes. In: Proceedings of the 9th international symposium on the effects of munitions with structures. sn
Rougier E, Knight EE, Broome ST, Sussman AJ, Munjiza A (2014) Validation of a three-dimensional finite-discrete element method using experimental results of the Split Hopkinson Pressure Bar test. Int J Rock Mech Min Sci 70:101–108
Saksala T (2015) Rate-dependent embedded discontinuity approach incorporating heterogeneity for numerical modeling of rock fracture. Rock Mech Rock Eng 48(4):1605–1622
Saksala T (2016) Modelling of dynamic rock fracture process with a rate-dependent combined continuum damage-embedded discontinuity model incorporating microstructure. Rock Mech Rock Eng 49(10):3947–3962
Saksala T, Hokka M, Kuokkala VT et al (2013) Numerical modeling and experimentation of dynamic Brazilian disc test on Kuru granite. Int J Rock Mech Min Sci 59:128–138
Schön J (2011) Physical properties of rocks: a workbook. Elsevier, New York
Shemirani AB, Naghdabadi R, Ashrafi MJ (2016) Experimental and numerical study on choosing proper pulse shapers for testing concrete specimens by split Hopkinson pressure bar apparatus. Constr Build Mater 125:326–336
Sun WC, Cai Z, Choo J (2017) Mixed Arlequin method for multiscale poromechanics problems. Int J Numer Methods Eng 111(7):624–659
Sylven ET, Agarwal S, Briant CL et al (2004) High strain rate testing of kidney stones. J Mater Sci Mater Med 15(5):613–617
Tan X, Konietzky H, Chen W (2016) Numerical Simulation of heterogeneous rock using discrete element model based on digital image processing. Rock Mech Rock Eng 49(12):4957–4964
Tu Z, Lu Y (2010) Modifications of RHT material model for improved numerical simulation of dynamic response of concrete. Int J Impact Eng 37(10):1072–1082
Villeneuve M (2008) Examination of geological influence on machine excavation of highly stressed tunnels in massive hard rock. Doctoral thesis
Villeneuve MC, Diederichs MS, Kaiser PK (2011) Effects of grain scale heterogeneity on rock strength and the chipping process. Int J Geomech 12(6):632–647
Wang Y, Tonon F (2011) Dynamic validation of a discrete element code in modeling rock fragmentation. Int J Rock Mech Min Sci 48(4):535–545
Wang QZ, Feng F, Ni M et al (2011) Measurement of mode I and mode II rock dynamic fracture toughness with cracked straight through flattened Brazilian disc impacted by split Hopkinson pressure bar. Eng Fract Mech 78(12):2455–2469
Wang Y, Zhou X, Xu X (2016) Numerical simulation of propagation and coalescence of flaws in rock materials under compressive loads using the extended non-ordinary state-based peridynamics. Eng Fract Mech 163:248–273
Xia K, Nasseri MHB, Mohanty B et al (2008) Effects of microstructures on dynamic compression of Barre granite. Int J Rock Mech Min Sci 45(6):879–887
Xing HZ, Zhang QB, Braithwaite CH et al (2017) High-speed photography and digital optical measurement techniques for geomaterials: fundamentals and applications. Rock Mech Rock Eng 50(6):1611–1659
Xing HZ, Zhang QB, Zhao J (2018) Stress thresholds of crack development and Poisson’s Ratio of rock material at high strain rate. Rock Mech Rock Eng 51(3):945–951
Xu Y, Dai F, Xu NW et al (2016) Numerical investigation of dynamic rock fracture toughness determination using a semi-circular bend specimen in split Hopkinson pressure bar testing. Rock Mech Rock Eng 49(3):731–745
Yu X, Chen L, Fang Q et al (2017) A concrete constitutive model considering coupled effects of high temperature and high strain rate. Int J Impact Eng 101:66–77
Yuan F, Prakash V, Tullis T (2011) Origin of pulverised rocks during earthquake fault rupture. J Geophys Res Solid Earth 116(B6)
Zhang QB, Zhao J (2013) Effect of loading rate on fracture toughness and failure micromechanisms in marble. Eng Fract Mech 102:288–309
Zhang QB, Zhao J (2014) A review of dynamic experimental techniques and mechanical behaviour of rock materials. Rock Mech Rock Eng 47(4):1411–1478
Zhang ZX, Kou SQ, Jiang LG et al (2000) Effects of loading rate on rock fracture: fracture characteristics and energy partitioning. Int J Rock Mech Min Sci 37(5):745–762
Zhang GK, Li HB, Li XF, Wang MY (2017a) Experimental study on damage characterization for granites by acoustic emission and ultrasonic transmission methods. Rock Mech Rock Eng (submitted)
Zhang QB, Braithwaite CH, Zhao J (2017b) Hugoniot equation of state of rock materials under shock compression. Philos Trans R Soc A 375:20160169
Zhao J, Zhou YX, Hefny AM et al (1999) Rock dynamics research related to cavern development for ammunition storage. Tunn Undergr Space Technol 14(4):513–526
Zhong WZ, Rusinek A, Jankowiak T et al (2015) Influence of interfacial friction and specimen configuration in Split Hopkinson Pressure Bar system. Tribol Int 90:1–14
Zhou XQ, Hao H (2008) Mesoscale modelling of concrete tensile failure mechanism at high strain rates. Comput Struct 86:2013–2026
Zhou F, Molinari JF (2004) Dynamic crack propagation with cohesive elements: a methodology to address mesh dependency. Int J Numer Methods Eng 59(1):1–24
Zhou YX, Xia K, Li XB et al (2011) Suggested methods for determining the dynamic strength parameters and mode-I fracture toughness of rock materials[M]//The ISRM suggested methods for rock characterization, testing and monitoring: 2007–2014. Springer International Publishing, New York, pp 35–44
Zhou XP, Bi J, Qian QH (2015a) Numerical simulation of crack growth and coalescence in rock-like materials containing multiple pre-existing flaws. Rock Mech Rock Eng 48(3):1097–1114
Zhou XP, Gu XB, Wang YT (2015b) Numerical simulations of propagation, bifurcation and coalescence of cracks in rocks. Int J Rock Mech Min Sci 80:241–254
Zhu WC, Tang CA (2006) Numerical simulation of Brazilian disk rock failure under static and dynamic loading. Int J Rock Mech Min Sci 43(2):236–252
Zhu WC, Niu LL, Li SH et al (2015) Dynamic Brazilian test of rock under intermediate strain rate: pendulum hammer-driven SHPB test and numerical simulation. Rock Mech Rock Eng 48(5):1867–1881
Zwiessler R, Kenkmann T, Poelchau MH et al (2017) On the use of a split Hopkinson pressure bar in structural geology: High strain rate deformation of Seeberger sandstone and Carrara marble under uniaxial compression. J Struct Geol 97:225–236
Acknowledgements
This work was supported by the National Natural Science Foundation of China (Nos. 51439008 and 41572307), the Science and Technology Project of Transportation Department of Guizhou Province (No. 2015122046), and China Scholarship Council (to the first author, No. 201604910678).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Li, X.F., Zhang, Q.B., Li, H.B. et al. Grain-Based Discrete Element Method (GB-DEM) Modelling of Multi-scale Fracturing in Rocks Under Dynamic Loading. Rock Mech Rock Eng 51, 3785–3817 (2018). https://doi.org/10.1007/s00603-018-1566-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00603-018-1566-2