
Abstract
Microactuators developed from shape memory alloy (SMA) thin films on flexible substrates find good applications in MEMS design. This article presents the models of the actuation behaviour of a thin film SMA bimorph, developed by depositing CuAlNi SMA on a curved Kapton polyimide sheet substrate through a physical evaporation technique. The thermo-mechanical behaviour of the bimorph is analyzed by actuating it through Joule heating, for various inputs. During heating, the CuAlNi SMA film produces a forward displacement and in the cooling cycle, the curved flexible substrate substantiates for a bias force to recover the bimorph to its original shape, thus revealing the shape memory effect. Modelling and simulation are essential for decision making and control to involve the SMA bimorph in applications since the model help to understand the input–output performances. The article briefs about the models developed from mathematical analysis and simulation based on the physics involved in the bimorph SMA structures; analytical models of the bimorph are developed for the thermal and mechanical responses and, a simulation model is developed to obtain its actuation. The results of the models developed coincide with the experimental outputs in the actuation voltage range of 1–2.5 V.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Microactuators are now becoming the essential blocks of MEMS devices that are equally capable of performing the functions of conventional actuators. Though several micro actuation mechanisms based on electrical, magnetic, mechanical, thermal are known, the primary focus is on the microactuators that have electrical input like voltage or current, so that they can be easily compatible with the power supply of the electronic devices (Li and Chew 2014; Fu et al. 2004). In this way, the electrothermal, piezoelectric, and electrostatic microactuators gain momentum. Among these, the electro-mechanical actuation mechanism using thin film shape memory alloy (SMA) exceeds the performance of the other actuation mechanisms owing to its advantages like a small amount of thermal mass required to heat or cool, reduced response time, good work output per volume and flexibility of design. Since these alloys can recover large strains, they are suitable for applications like micropumps and microgrippers (Fu et al. 2004, 2005; Shin et al. 2005). Many actuators are being developed with SMA thin films in the forms of cantilevers, diaphragms, etc. Thin film SMAs developed on flexible substrates have exceptional thermo-mechanical properties and are also used to overcome problems with training (Ishida 2013; Kotnur et al. 2014).
The shape memory effect (SME) was first observed in samples of Au–Cd by Olander (1932). Later there were many other SMAs discovered like NiTi also known as Nitinol by William Buehler and Frederick. Among these, copper-based SMAs can be used in high temperature applications as their transformation temperatures lie beyond 200 °C and also exhibit minimum hysteresis (Lovey et al. 2008). CuAlNi and CuZnAl are excellent actuators with exceptional properties of shape memory effect at lower manufacturing cost and have the potential to replace the conventionally used NiTi (San Juan et al. 2014; Juan et al. 2010). CuAlNi SMA has been proved to show 18 percent of recoverable strain which is much higher when compared to the conventional NiTi SMA (Yin et al. 2013; Fu et al. 2009). Their properties such as good machinability, ease in the forming process, high thermal stability, rapid heating and cooling rate, less hysteresis, and higher Young’s modulus play a vital role in accomplishing micro actuation (Araujo et al. 2015; Huang 2002).
Thin film SMAs can be actuated using different sources like a laser, hot fluid, Joule heating, etc., among which actuation through Joule heating provides simplicity and convenience. The elastic substrates can be prestrained in different shapes according to the constraint; it acts as a bias force during the cooling cycle by returning the bimorph to its original shape and inducing stress required for cyclic actuation (Choudhary and Kaur 2016).
The technology of assimilating SMA structures in the form of composites has opened up a new arena for the improvement of micro and macro devices. Such technology is the use of flexible polyimide substrate along with the SMA, together called the shape memory alloy bimorph. Bimorph actuators are suitable for deflection type micromirrors; this work is intended to be a subsection of such a design (Potekhina 2019). Deflection type micromirrors are broadly used in various types of applications such as bar code scanning, projection displays, object recognition, communication, and sensors applications. In comparing other actuators for MEMS mirrors, the electro-thermal actuators perform the best in both out-of-plane motion and rotational motions. Due to its small size, lightweight, low energy consumption, and minimum cost it is also inevitable in medical applications namely medical endoscopy, optical scanning microscopy, confocal microscopy/OCT, and laparoscopy (Pengwang et al. 2016).
The research group (Akash et al. 2017a, b; Jayachandran et al. 2019) has developed a bimorph by deposition of composite material over a passive flexible substrate, which provides two way shape memory effect without any bias mechanism and investigated for different substrate thickness and different substrate temperatures. These investigations stated that the Cu–Al–Ni/Polyimide bimorph (bimorph SMA actuator) developed through direct thermal evaporation method at 150 °C growth substrate temperature on flexible pre-strained 75 μm thick Kapton polyimide sheets displayed two-way shape memory effect without any post processing and training with higher displacement, lower fatigue and better applicability in microdevices.
While designing bimorph actuators the dynamic and steady state behaviour is important because the deformation is nonlinear. To identify the performance of these bimorph actuators, important actuation properties to be considered are displacement, temperature and electrical resistance. A lot of research has been carried out in the modelling of bimorph (Ezzat and El-Bary 2012; Velazquez and Pissaloux 2012) with respect to the size dependency for microscale and nanoscale employing non-classical continuum theories (Ghobadi et al. 2019; Mehralian and Beni 2018). The current study concentrates on a mesoscale bimorph actuator of dimension 3 cm × 2 cm × 76.75 μm and the model is derived from the basic analytical equations of mechanics. Some of the researchers have also carried out the finite element simulation and validation of the deflection of SMA Bimorph (Abu Zaiter et al. 2015; Pal and Xie 2010). All the SMA models conventionally contribute to characterizing the properties of NiTi wires and embedded SMA structures, but the model of bimorph SMA actuators is not found in the literature until now.
The objective of this paper is to develop analytical and simulation models of the mechanical and electrical properties of thin film CuAlNi/polyimide SMA bimorph actuator and validate them experimentally. It presents the studies of the effects on temperature and the displacement of the thin film SMA bimorph when it is subjected to Joule heating. A structure-based finite element (FE) model of a thin film of Kapton HN material deposited with a thin film SMA is developed in COMSOL Multiphysics®. The experimental results are compared with the analytical and simulation results performed for different voltage inputs. The paper is organized as follows: Sect. 2 explains the design and working of CuAlNi/polyimide bimorph actuator followed by Sect. 3—analytical model, Sect. 4—simulation model, Sect. 5—physical model, Sect. 6—results and discussion, and Sect. 7—conclusion.
2 CuAlNi/polyimide bimorph actuator
CuAlNi/polyimide SMA bimorph exhibits shape memory effect without any training or post-processing. These bimorphs are developed through the direct thermal evaporation method. The facility for the thermal evaporation method is shown in Fig. 1a, in which CuAlNi SMA is of composition Cu–14Al–4Ni wt%. Deposition of (small pellets of 100 mg) SMA is allowed on a flexible pre-strained (curved) 75 μm thick Kapton polyimide HN sheets shown in the first part of Fig. 1b of required dimension at appropriate substrate temperature (150 °C) under the system chamber of high vacuum. During this thermal evapouration process, the 75 μm thick Kapton polyimide HN sheet is held to the substrate lamp as shown in the second part of Fig. 1b.

After deposition, upon removal from the holder the CuAlNi/Polyimide SMA bimorphs folded into a curved shape due to the trained polyimide substrate and it resembles the third part of Fig. 1b. And during actuation, the SMA bimorph flattens as shown in the fourth part of Fig. 1b. The detailed fabrication process adopted for developing SMA/polyimide bimorph may be referred from Akash et al. (2017a). The bimorphs display a two-way shape memory effect without any post-processing and training.
2.1 Structure of bimorph SMA
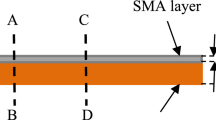
Electro-thermal bimorph actuators consist of two layers sandwiched together along their longitudinal axis serving as a single composite film; one layer consists of an alloy having a lower coefficient of expansion while the other layer is polyimide with a higher coefficient of expansion. This composite has the same length and width with different thicknesses of the substrate and the deposited film. The bimorph film is bent downwards due to the cup like shape of the polyimide sheet. The structure of a CuAlNi/Polyimide SMA bimorph actuator is illustrated in Fig. 2a, b.

CuAlNi/polyimide SMA bimorph actuator
2.2 Actuation principle of bimorph SMA
The actuation principle of a CuAlNi/Polyimide SMA bimorph actuator is illustrated in Fig. 2c. This actuator is heated by an electrical current passing through the conductive SMA layer due to an applied DC voltage. The heated bimorph actuator moves upward with a force due to a change in phase (martensite to austenite) of the SMA layer. When the DC voltage is removed the bimorph actuator returns to its normal state due to the bias force of the trained polyimide sheet.
3 Analytical model
The analytical model of a CuAlNi/polyimide SMA bimorph actuator is shown in Fig. 3. In the analytical model, to describe the system, the changing parameters are expressed as a mathematical function. The analytical model of the SMA bimorph actuator is grouped into three sections of models namely, the thermal model, mechanical model and temperature-based resistance model. The thermal model describes the temperature variation in the SMA bimorph actuator when subjected to Joule heating. The mechanical model describes the change in displacement effected in the SMA bimorph actuator for a change in the temperature. The resistance model describes the resistance variation of the SMA bimorph actuator corresponding to the temperature change.

Block diagram of the analytical representation of CuAlNi/polyimide bimorph actuator
3.1 Thermal model
The block diagram of thermal model for CuAlNi/Polyimide SMA bimorph actuator is demonstrated in Fig. 4. The thermal model is arrived based on the principle that the change in the internal heat energy of the CuAlNi/polyimide SMA bimorph actuator is equivalent to the energy supplied to it by the voltage source, minus the energy dissipated to the air by normal convection. The thermal balance equation of the SMA bimorph when a voltage applied to the SMA is given by,

Pictorial representation for the thermal model of CuAlNi/polyimide bimorph actuator
The heat input is given by,
The heat absorbed by the bimorph actuator is,
The heat loss due to convection
Equations 2, 3 and 4 substitute in Eq. 1,
The temperature of the bimorph is
where, \(m\) is the mass in kg, \(c\) is the specific heat capacitance in J/°C. kg, \(h\) is the heat transfer coefficient in W/m2 °C, \(A\) is the cross sectional area in m2, \(T\) is the temperature in °C, \({T}_{A}\) is the ambient temperature in °C, \(R\left({T}_{A}\right)\) is the resistance at ambient temperature in ohm, \(i\) is the current in mA.
3.2 Mechanical model
In Fig. 5, \({r}_{1}, {D}_{1}, {\phi }_{1}\) are radius distance and bending angle of the CuAlNi/polyimide SMA bimorph actuator due to the prestraining of the Kapton polyimide and \({r}_{2}, {D}_{2}, {\phi }_{2}\) are radius, distance and bending angle after thermal actuation of the CuAlNi/polyimide bimorph SMA actuator.

Conceptual illustration to calculate the vertical displacement of curved SMA bimorph
From Fig. 5, the free end displacement of bimorph SMA due to Joule heating is given by,
where, \({D}_{1}\) is the free end distance of the bimorph SMA from its reference axis due to the prestraining of the Kapton polyimide and \({D}_{2}\) is the free end distance of the bimorph SMA from its reference axis after the thermal actuation.
In general, the trained SMA bimorph is considered to have the shape of a circular arc of length L, radius r and angle \(\phi\). From Fig. 6, the tip displacement \(D\) of the SMA bimorph from the reference axis (blue dotted line) is found using the radius of curvature of SMA bimorph r (green bolded line) and, the angle between reference axis and curved bimorph SMA axis \(\phi\) (violet line).

Free end distance calculation of the bimorph SMA from its reference axis
The tip displacement of the bimorph from the reference axis is given by
ssuming a small bending \(\left( {\phi = 0,cos\phi = 1 \,{\text{and}} \,sin\phi = 0} \right)\), the vertical tip displacement can be approximately calculated from the first two terms of a Taylor series expansion. Equation 8 can be approximated as,
The value of \(\phi\) is determined using the values of length of the bimorph and the radius of curvature is determined as
Therefore, the vertical tip displacement from its reference axis due to the prestraining of the Kapton polyimide is
where, \({r}_{1}\) is the initial radius of curvature in mm.
Vertical tip displacement from its reference axis due to the thermal actuation is given by
where, \(r_{2}\) is the final radius of curvature in mm.
Since the heated bimorph is unfolded, the resultant curvature, \(r_{th}\) is considered to be negative and therefore the final curvature of the SMA bimorph is as referred from Lammel et al. (2002).
where, \({r}_{th}\) is the radius of curvature due to thermal deflection in mm. The detailed
\(E^{\prime}\) is the biaxial elastic modulus
where, \(\vartheta\) is the Poisson’s ratio, \(E\) is the elastic modulus in Pa, \(t\) is the thickness in mm, \(\alpha\) is the thermal coefficient of expansion in K−1, Index p for polyimide, s for SMA.
3.3 Temperature dependent resistance model
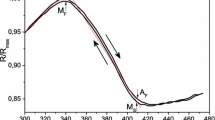
In general, the variation of electrical resistance of metals shows a linear relationship with the temperature change. The temperature coefficient of resistance is initially calculated from the linearized resistance formula from Eq. 16 using the experimentally measured resistance and temperature.
where, \(T\) is the temperature, °C, \({T}_{A}\) is the ambient temperature, °C, \(R\left({T}_{A}\right)\) is the resistance at ambient temperature, ohm, \(\beta\) is the temperature coefficient of resistance, K−1. The Fig. 7 shows resistance vatiation of SMA bimorph with respect to temeparture.

Change in resistance with respect to temeparture
CuAlNi/polyimide SMA bimorph actuator has negative temperature coefficient of resistance and it is found that its average value is 0.348 K−1. The analytical resistance is evaluated by substituting the temperature calculated in Sect. 3.1 and temperature coefficient of resistance using Eq. 16.
The dimensions of the Polyimide substrate and thin film CuAlNi which are used for the analysis and numerical simulation are presented in Table 1.
The thermo-mechanical properties of Polyimide substrate and thin film CuAlNi are defined in Tables 2 and 3 respectively. The same are used for the analysis and numerical simulation.
Figure 8 illustrates the variation of temperature with respect to change in voltage based on the Eqs. (1–5) and the variation of displacement with respect to temperature change based on Eqs. (6–15). The figure also depicts the variation of resistance with respect to temperature change. The temperature and displacement have a nonlinear increase with linear increase of voltage whereas resistance decreases nonlinearly with linear increase in voltage.

Variation of temperature, displacement and resistance with respect to voltage change (analytical results)
4 Simulation of CuAlNi/polyimide bimorph
The displacement characterization of bimorph SMA is performed using structure based Finite Element Analysis (FEA) in COMSOL Multiphysics® software. The SMA bimorph is curved when unactuated due to the prestraining of the polyimide; the bimorph flattens i.e.; the radius of curvature increases during actuation. Analytically, the expression of the radius of curvature for both straight and curved geometries is the same after and before actuation respectively. In numerical simulation, it is complicated to model a structure with an initial bend. The analysis is possible by considering the SMA bimorph with a straight polyimide substrate that curves during actuation, since both the options offer the same curvature.
For the purpose of the analysis, a SMA bimorph sheet of dimension 3 cm × 2 cm × 76.75 μm is considered. A cut of 1 cm × 1 cm dimension is made at the middle of one end to realise the shape of a bilegged cantilever and it is fixed to a support to provide the supply voltage. The voltage is provided at the fixed end and the displacement is measured at the free end as shown in Fig. 9.

Simulation model of CuAlNi/polyimide bimorph actuator
Simulations are carried out in COMSOL Multiphysics® to determine the displacement profile of the structural model of the CuAlNi SMA bimorph actuator for the voltage range of 1–3.5 V. Figure 10 shows the meshing of the designed structure. Table 4 lists the number of mesh elements for each geometry of CuAlNi SMA bimorph actuator. Figure 11 shows the simulated displacement of CuAlNi SMA bimorph. Table 5 gives the X, Y, Z coordinates of the simulated model of CuAlNi SMA bimorph. Based on these coordinate values the tip displacement of the model is obtained through numerical simulation.

Mesh model of CuAlNi/polyimide bimorph actuator

Simulated displacement of CuAlNi/polyimide bimorph actuator
Based on the simulation results, the displacement variation of the SMA bimorph actuator for various voltages are as shown in Fig. 12. When the voltage increases, the displacement is also found to increase with the maximum value of 6 mm for the input voltage of 3.5 V.

Variation of displacement with respect to voltage change
5 The physical model of CuAlNi/polyimide bimorph
To facilitate the Joule heating procedure, a mechanical arrangement is made of acrylic sheets with a provision to hold the bimorph sample. The SMA bimorph is cut in the shape of a bi-legged cantilever and copper leads are provided at both the legs of the cantilever to minimize the contact resistance and help in the flow of current to the sample. The schematic block diagram and photograph of the experimental setup to provide Joule heating to the SMA bimorph actuator and obtain its displacement characteristics is as shown in Fig. 13a, b. When an input voltage is given to the SMA bimorph using amplifier circuit, the current flowing through the SMA layer of the bimorph increases its temperature and moves it upward due to thermal actuation. A non-contact type laser displacement sensor (LDS) is used to measure the displacement of the SMA bimorph. A thermal imaging camera is used to capture the temperature of bimorph SMA sample. An external resistor \({R}_{0}\) is connected in series to the SMA bimorph. The voltage across the bimorph VSMA and the external resistance VRo are used to evaluate \({R}_{SMA}\) the resistance variation of SMA bimorph using Eq. (17).

Experimental set up to obtain the vertical displacement of curved SMA bimorph
When actuating the CuAlNi/Kapton SMA bimorph actuator by Joule heating using the experimental setup shown in Fig. 13b, the actuator moves upward due to temperature variation of the SMA layer. The position/tip of the bimorph due to the displacement before and after actuation is as shown in Fig. 14a, b. The temperature distribution of the bimorph actuator is obtained using the FLIR thermal imaging camera and the image is as shown in Fig. 14c. The maximum temperature of 37.6 °C is observed at the legs of the bilegged cantilever where the supply is connected and minimum of 29.6 °C is observed at the tip of the cantilever. The values of the surface temperature of the thin film SMA by Joule heating are substantiated by the (surface temperature of the thin film SMA by plate heating) results of the earlier literature (Jayachandran et al. 2019), which confirms that although the difference in the surface temperature between the unactuated and actuated state is lesser, the displacement of the bimorph during the heating cycle is due to the shape memory effect of the coated material. The variation of temperature, displacement and resistance with respect to variation of the input voltage are acquired and are plotted in Fig. 15. For the voltage below 1 V the system responds with negligible changing parameters; hence the voltage below 1 V is the inactive range. For the voltage from 1 to 3 V the system parameters displacement, temperature and resistance vary considerably and hence this portion between 1 and 3 V is considered as the active region. When the voltage is increased from 3 to 3.5 V, the system is saturated to the maximum displacement value of 4.5 mm; hence the voltage range beyond 3–3.5 V is considered as the saturated region. When the voltage is increased beyond 3.5 V, the bimorph burns out. The SMA deposition withers out as shown in Fig. 14d and the sample becomes unfit for further use. Hence the safe operating voltage range of SMA bimorph actuator is 1–3.5 V and the system shows the following responses in the operating voltage of 1–3.5 V: temperature increases from 30.3 to 37.6 °C, displacement increases from 0.5 to 4.79 mm and resistance decreases from 6.5 to 4.2 Ω.

Experimental resposes of the bimorph SMA actuator

Variation of temperature, displacement and resistance with respect to voltage change (simulation results)
6 Results and discussion
Figure 16a shows the theoretical, simulated and experimental responses for the given input voltages and Fig. 16b shows the percentage of error in displacement of theoretical and simulation results corresponding to the experimental results.

a Variation of displacement with respect to voltage change b percentage of error
For the active region of voltage ranging from 1.5 to 2.5 V, the displacement change of the theoretical model and simulation model are approximately equal to the experimental model. In this active region, the displacement changes with respect to changing voltage are approximately linear with a slope of 2.5. After analyzing Fig. 15, it is found that the response of the analytical model and simulated model capture the majority of the input output behaviour of the system in the active range of 1.5–2.5 V.
The response time of the CuAlNi/polyimide SMA bimorph actuator is observed when actuated for 1 V, 2 V and 3 V. Corresponding plots are represented in Fig. 17a; it is observed that the bimorph takes 0.3 s to respond for an applied voltage of 3 V. Further, the repeatability of actuation of the CuAlNi/polyimide SMA bimorph actuator is observed by Joule heating with pulse input of 0.05 Hz frequency corresponding to input voltages of values 1 V, 1.5 V, 2 V, 2.5 V, and 3 V, measured the displacement using laser displacement sensor and plotted in Fig. 17b.

Response of the SMA bimorph
Having understood the potential of the bimorph, a micro manipulator is proposed to be designed and implemented using a couple of SMA bimorph actuators to be suitable for micro mirror applications. The proposed micro manipulator will be able to move the micro mirror in vertical direction (Y-manipulation) and angular direction (θ-Manipulation), by using 2 bimorph actuators. One end of each actuator is fixed to the base and the other end is attached to the mirror plate which undergoes micro manipulation. By activation of both the actuators, the mirror moves in vertical direction along Y axis. By activation of any one of the actuators, the mirror moves in angular direction along θ axis. Detailed investigations on micro manipulation and control of the proposed SMA bimorph based micro mirror applications are the future scope.
7 Conclusion
Models of wire and spring forms or thin film SMA actuator likewise other bimorphs though it involves numerous parameters have been extensively developed by many researchers. The main issue involved in modeling the integrated SMA composites lies in the identification of the associated thermo-mechanical parameters. To overcome this, an analytical model and simulation model of thin film CuAlNi/Kapton SMA bimorph actuator is presented using simple equations with limited known parameters of the SMA composite and polyimide; further, the thermo-mechanical behaviour is analyzed. The structural and thermal models are analyzed to elucidate the displacement, temperature and resistance characteristics by Joule heating actuation. A structure based FEA simulation is carried out in COMSOL Multiphysics. The analytical and simulation results are compared with the experimental results for validation. It is observed that the analytical model and simulation model parameters (displacement, temperature and resistance) varies linearly with respect to input voltage for the active region corresponding to the voltage range of 1–2.5 V.
Data availability
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
References
Abu Zaiter A, Nafea M, Mohd. Faudzi AA, Kazi S, Mohamed Ali MS (2015) Thermomechanical behaviour of bulk NiTi shape-memory-alloy microactuators based on bimorph actuation. Microsyst Technol 22(8):2125–2131. https://doi.org/10.1007/s00542-015-2641-1
Akash K, Mani Prabu SS, Shukla AK, Nath T, Karthick S, Palani IA (2017) Investigations on the life cycle behaviour of CuAlNi/polyimide shape memory alloy bi-morph at varying substrate thickness and actuation conditions. Sens Actuators A Phys 254:28–35. https://doi.org/10.1016/j.sna.2016.12.008
Akash K, Shukla AK, Mani Prabu SS, Narayane DC, Kanmanisubbu S, Palani IA (2017) Parametric investigations to enhance the thermo mechanical properties of CuAlNi shape memory alloy Bi-morph. J Alloys Comp 720:264–271. https://doi.org/10.1016/j.jallcom.2017.05.255
Araujo VEA, Gastien R, Zelaya E, Beiroa JI, Corro I, Sade M, Lovey FC (2015) Effects on the martensitic transformations and the microstructure of CuAlNi single crystals after ageing at 473 K. J Alloys Comp 641:155–161. https://doi.org/10.1016/j.jallcom.2015.04.065
Choudhary N, Kaur D (2016) Shape memory alloy thin films and heterostructures for MEMS applications: a review. Sens Actuators A Phys 242:162–181. https://doi.org/10.1016/j.sna.2016.02.026
Ezzat MA, El-Bary AA (2012) MHD free convection flow with fractional heat conduction law. Magnetohydrodynamics 48(4):503–522
Fu Y, Du H, Huang W, Zhang S, Hu M (2004) TiNi-based thin films in MEMS applications: a review. Sens Actuators A Phys 112(2–3):395–408. https://doi.org/10.1016/j.sna.2004.02.019
Fu YQ, Luo JK, Hu M, Du HJ, Flewitt AJ, Milne WI (2005) Micromirror structure actuated by TiNi shape memory thin films. J Micromech Microeng 15(10):1872–1877. https://doi.org/10.1088/0960-1317/15/10/012
Fu YQ, Luo JK, Flewitt AJ, Huang WM, Zhang S, Du HJ, Milne WI (2009) Thin film shape memory alloys and microactuators. Int J Comput Mater Sci Surf Eng 2:208. https://doi.org/10.1504/IJCMSSE.2009.027483
Ghobadi A, Beni YT, Golestanian H (2019) Size dependent thermo-electro-mechanical nonlinear bending analysis of flex electric nano-plate in the presence of magnetic field. Int J Mech Sci 152:118–137. https://doi.org/10.1016/j.ijmecsci.2018.12.049
http://www.lookpolymers.com/polymer_DuPont-Kapton-300HN-Polyimide-Film-75-Micron-Thickness.php. Accessed 24 Nov 2020
Huang W (2002) On the selection of shape memory alloys for actuators. Mater Des 23(1):11–19. https://doi.org/10.1016/s0261-3069(01)00039-5
Ishida A (2013) Progress in thin-film shape-memory-alloy actuators. In: 2013 transducers and eurosensors XXVII: the 17th international conference on solid-state sensors, actuators and microsystems (transducers and eurosensors XXVII). https://doi.org/10.1109/transducers.2013.6627083
Jayachandran S, Akash K, Mani Prabu SS, Manikandan M, Muralidharan M, Brolin A, Palani IA (2019) Investigations on performance viability of NiTi, NiTiCu, CuAlNi and CuAlNiMn shape memory alloy/Kapton composite thin film for actuator application. Compos Part B Eng 176:107182. https://doi.org/10.1016/j.compositesb.2019.107182
Graczykowski B, Biskupski P, Mroz B, Mielcarek S, Nó ML, San Juan J (2010) Elastic properties of Cu/Al/Ni shape memory alloys studied by dynamic mechanical analysis. Smart Mater Struct 19:15010. https://doi.org/10.1088/0964-1726/19/1/015010
Kotnur VG, Tichelaar FD, Fu WT, De Hosson JTM, Janssen GCAM (2014) Shape memory NiTi thin films deposited on polyimide at low temperature. Surf Coat Technol 258:1145–1151. https://doi.org/10.1016/j.surfcoat.2014.07.018
Lammel G, Schweizer S, Renaud P (2002) Optical microscanners and microspectrometers using thermal bimorph actuators. Kluwer Academic Publishers, Dordrecht. https://doi.org/10.1007/978-1-4757-6083-5
Li L, Chew ZJ (2014) Microactuators: design and technology. Smart Sens MEMS. https://doi.org/10.1533/9780857099297.2.305
Lovey FC, Condó AM, Guimpel J, Yacamán MJ (2008) Shape memory effect in thin films of a Cu–Al–Ni alloy. Mater Sci Eng A481–482:426–430. https://doi.org/10.1016/j.msea.2007.01.175
Mehralian F, Beni YT (2018) Vibration analysis of size-dependent bimorph functionally graded piezoelectric cylindrical shell based on nonlocal strain gradient theory. J Braz Soc Mech Sci Eng 40(1):27. https://doi.org/10.1007/s40430-017-0938-y
Pengwang E, Rakotondrabe K, Micky-Andreff N (2016) Scanning micromirror platform based on MEMS technology for medical application. Micromachines. https://doi.org/10.3390/mi7020024
Potekhina W (2019) Review of electrothermal actuators and applications. Actuators. https://doi.org/10.3390/act8040069
Pal S, Xie H (2010) Analysis and simulation of curved bimorph microactuators. In: Technical Proceedings of the 2010 NSTI nanotechnology conference and expo, pp 685–688
San Juan J, Gómez-Cortés JF, López GA, Jiao C, Nó ML (2014) Long-term superelastic cycling at nano-scale in Cu–Al–Ni shape memory alloy micropillars. Appl Phys Lett 104:1–6. https://doi.org/10.1063/1.4860951
Shin DD, Mohanchandra KP, Carman GP (2005) Development of hydraulic linear actuator using thin film SMA. Sens Actuators A Phys 119(1):151–156. https://doi.org/10.1016/j.sna.2004.01.025
Velazquez R, Pissaloux EE (2012) Modelling and temperature control of shape memory alloys with fast electrical heating. Int J Mech Control 13(2):3–10
Yin H, Yan Y, Huo Y, Sun Q (2013) Rate dependent damping of single crystal CuAlNi shape memory alloy. Mater Lett 109:287–290. https://doi.org/10.1016/j.matlet.2013.07.062
Acknowledgements
The authors sincerely acknowledge the support from Mechatronics and Instrumentation lab, Indian Institute of Technology Indore for fabricating the CuAlNi/Polyimide SMA bimorph samples.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Vetriselvi, V., Dhanalakshmi, K. & Geetha, M. Modelling the steady state response of CuAlNi/polyimide bimorph actuator. Microsyst Technol 28, 2455–2465 (2022). https://doi.org/10.1007/s00542-022-05369-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-022-05369-7