
Abstract
This paper investigates utilizing ferrofluid in a novel design for a tilt sensor. Ferrofluid is becoming widely used in various fields such as sealing, heat transfer and damping, and its popularity is increasing due to its ability to function as both a fluid and a magnetized substance. The proposed sensor design employs the movement of an excited ferrofluid through a transformer setup which detects the induced voltage in a sensing coil due to tilting of the device. The movement of the ferrofluid is caused by the mechanical force created by the swinging of a non-magnetic mass. As the device tilts, it causes the mass to swing in the direction of tilt. The mass is attached directly to a flexible tube containing ferrofluid and pulls the tube through a set of rollers, squeezing the ferrofluid towards the sensing coil. The voltage readings in the sensing coil are used to determine the tilt angle of the device. The device varies from previous designs by incorporating the mechanical force exerted to the ferrofluid from rollers due to titling of the mass. This mechanical force helps overcome the attraction force between the excited coil and the ferrofluid. The device was fabricated and characterized within the range of 0°–70° angle of tilt. The leakage of the ferrofluid through the gap between the rollers was evaluated and no sign of a leakage was observed.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Tilt sensors are useful devices that can be found in numerous fields such as medicine (Dai et al. 1996), computer (Chen 2001), aerospace (Toyoda et al. 2002), civil construction (Ha et al. 2013), etc. Several papers have been published on development of tilt sensors (Bao et al. 2009; Su et al. 2017; Deng et al. 2016; Jung et al. 2007). Generally, tilt sensors are designed to require only the force of gravity, such as in a pendulum style tilt sensor, to determine the angle of tilt (Olaru and Dragoi 2005). Pendulum style is often bulky making it difficult to use or unusable in certain situations. In order to overcome this problem additional designs were created using resistive, photoelectric, or electrolyte methods. Other methods involved an optical version of the pendulum style method, which used a tube containing liquid with a large gas bubble. Calculations were made based on the location of the bubble as the device tilted (Andò et al. 2013). However, these methods usually compromised performance for compactness. Because of this the pendulum style was the preferred method due to its better performance (Middelhoek et al. 1988; Baltag et al. 2000). Another type of tilt sensor is currently being developed with ferrofluid to attack the bulky design problem. These style sensors not only are more compact, but can be created in a cost-effective manner, making them the possible new favorite method for tilt measurement sensors.
Ferrofluid is a solution that contains particles of a magnetic material within a carrier fluid. The particles are extremely small, generally 10–20 nm in diameter, and make up a small percentage of the total mass of the fluid (Raj et al. 1995; Berger et al. 1999; Scherer and Figueiredo Neto 2005). The carrier fluid, typically water or oil (Olaru et al. 2017), is combined with a type of surfactant to stabilize the magnetic particles and prevent clumping (Scherer and Figueiredo Neto 2005; Das and Badal 2019). The ratio and materials used to create the ferrofluid cause the properties of the fluid to vary (Barrera et al. 2019). When in the presence of a magnetic field ferrofluid reacts and changes in physical characteristics, specifically viscosity and density (Medvegy et al. 2017). The composition of the ferrofluid determines the degree to which the ferrofluid reacts (Barrera et al. 2019). This change in characteristics can be utilized in various ways. Currently ferrofluid is being used in commercial products for sealing, damping, lubricating, braking, and heat transfer systems (Scherer and Figueiredo Neto 2005; Olaru et al. 2017; Nair 2013; Mayer 2015). The ferrofluid applications are currently extending into sensors, pumps, actuators, etc. (Olaru et al. 2017; Yang and Li 2017; Michelson et al. 2019). Sensors have been developed for various measurements such as tilt (Yao et al. 2016), acceleration (Qian and Li 2014), tactile (Volkova et al. 2017), magnetic flux (Homa and Pickrell 2014; Huang et al. 2017), etc. The use of ferrofluid in these designs allows for simplification and a decrease in overall size.
Some ferrofluid tilt sensor designs are similar to the mechanical pendulum style sensors. They utilize a magnetic pendulum above a magnetic fluid or ferrofluid which is excited as the pendulum swings above. These designs have allowed for the pendulum style sensors to decrease in size and become more accurate in measurement (Cotae et al. 1997). However, the majority of new ferrofluid tilt sensors are being designed to utilize a similar approach to the optical sensors. The designs use a tube, partially filled with ferrofluid, and wrapped with an exciting and sensing coil. This coil setup is referred to as a transformer style design. This type of design will sometimes include three coils instead of two. Usually this appears as an exciting coil in the middle of the tube with two sensing coils on either side. As the tube tilts, a larger amount of the excited fluid would then theoretically slide through the sensing coil in the direction of the tilt. The change in voltage caused by the sliding ferrofluid allows for tilt angle to be determined (Rosensweig 2013). Similar designs may instead fill the tube with water and insert a small drop of ferrofluid. In this case the change in voltage indicates the location of the drop of ferrofluid rather than the amount of ferrofluid in the sensing coils (Ando et al. 2007). The concern with the transformer design is that the ferrofluid would become attracted to the exciting coil, and the force of gravity would not be enough to overcome this attraction force. It is assumed that some mechanical force is necessary, in addition to gravity, to overcome the attraction force. Some designs have overcome this issue with various design alterations such as the use of permanent (Welch et al. 2013) or floating magnets within the tube (Olaru et al. 2017; Liang et al. 2018). The movement of the magnet then excites the ferrofluid and the transformer detects the movement of the magnet rather than the fluid.
An additional issue with previous designs is that they can only measure tilt over one axis, for example in the negative and positive x-directions. This has been solved in some cases with a gyroscope design rather than a simple tilt sensor design (Andò et al. 2010). Another proposed design for bi-directional tilt sensing involved utilizing Hall effect sensors to detect the change in displacement of a ferrofluid covered magnet. As the magnet moves in relation to tilt, the magnetic field created by the magnet also changes. The change in magnetic field is then detected by the Hall effect sensors (Öztürk and Yariçi 2019). Additional issues include the effects of vibrations, temperate changes, pressure, and other environmental factors on the accuracy and repeatability of the sensor calculations (Olaru et al. 2017; Resler and Rosensweig 1964).
This paper exploits the properties of ferrofluid in order to create a novel design for a tilt sensor. Various sensor developments have been demonstrated by this group (Duell et al. 2018; Rashidi et al. 2019; Bower et al. 2018). The proposed design builds on the tubular transformer design, while adding a mechanical element to overcome the ferrofluid attraction issue in the exciting coil. The tubes are made of a flexible material and are attached to a hanging mass. As the sensor is tilted, the mass will swing in the direction of tilt moving the flexible tube with it. As the mass shifts in the direction of tilt, the tube is pulled through a set of rollers that will squeeze the tube as it passes through. The squeezing of the tube is theorized to force the ferrofluid towards the coils and to be enough to overcome the attraction force between the exciting coil and the ferrofluid. This design is meant to overcome the inabilities of previous designs. In addition, the design has potential to be converted to a multi-directional tilt sensor by adding a similar set of rollers to the other directions. Similar inclinometers have been already developed for use in various applications. The tilt sensor presented in this paper could be directly implemented into these applications such as ground movement (Ha et al. 2018), standing lumbar lordosis (Salamh and Kolber 2014), hip joint range of motion (Charlton et al. 2015), anti-theft protection of valuables (Blanpain and Delapierre 2005), automotive (Lapadatu et al. 2001), landslide monitoring (Wang et al. 2015), structural health monitoring (Ha et al. 2013), autotracking antenna systems for vessels (Yoshida et al. 2009), and more.
2 Design
The sensor design consists of a flexible tube and transformer coil assembly within a housing. There is a hanging mass of a dense, non-magnetic material in the middle of the housing. The mass is held by a cable from the top of the housing. The flexible tube is connected to one side of the mass by a clip which is able to rotate as needed. The rod end of the clip is inserted into the flexible tube and acts as a plug to stop the ferrofluid from escaping. The rotation of the clip allows it to stay aligned with the flexible tube during tilting. As the device tilts, the mass swings toward the direction of tilt pulling the tube through the rollers. This pulling motion allows for the rollers to squeeze the ferrofluid up towards the coils.
In this design, a 300 mm × 100 mm × 180 mm housing with open sides was used. The housing was purposely oversized to create a steady base for the sensor testing. A smaller overall design can be used in the future. The tube assembly is 160 mm in length, 100 mm of which will be covered in the sensing and exciting coils. In order to keep the coils from changing shape and length, the 100 mm section surrounded by coils is a non-flexible tube. This tube is connected to the flexible tubing on each end and is attached by an adhesive. This configuration prevents the movement and stretching of the coils, which will keep the sensor data consistent and accurate. The flexible tube and non-flexible tube have an internal diameter of 1 mm.
The tube is attached to the side wall of the housing, positioned with a support piece that holds the tube at a 30° angle. This angle will keep the ferrofluid out of the sensing coil due to gravity until the device is actually tilted. It is additionally placed with the exciting coil toward the inside of the housing and the sensing coil toward the outside. The support piece also holds the two rollers in place that create the squeezing force for the flexible tube. These rollers are placed around the flexible tube, one above and one below. The rollers are 10 mm in diameter, with a 5 mm bore, and are 15 mm in length. There is also a slight ridge on either end of the roller, which was designed to stop the tubes from walking from side to side. The rollers are positioned in the support piece so that they abut one another, giving them the ability to tightly squeeze the tube closed. This tight fit will keep the ferrofluid from leaking pass the rollers. Figure 1 illustrates the Solidworks model of the device. The device dimensions and specifications are summarized in Table 1.

Model of fully assembled sensor (a). Close-up view of tube assembly (b). The figure shows how the mass, tubes, coils and rollers are connected to each other
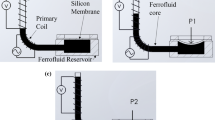
Working principle of the tilt sensor is shown in Fig. 2. Part A of the diagram depicts the sensors “at rest” state, when there is no tilting occurring. Part B of the diagram depicts the movement of the flexible tube and the ferrofluid when tilting occurs. Most of the ferrofluid is initially located inside the exiting coil when the device is at the rest with no titling (Fig. 2a). As the mass shifts due to tilting, it causes the flexible tube to be pulled through the rollers, squeezing the ferrofluid toward the sensing coil (Fig. 2b). The excited ferrofluid in the sensing coil will then induce a voltage across it which depends on the length of the ferrofluid covered by the sensing coil. This squeezing force is theorized to be enough to continuously push the ferrofluid through the exciting coil toward the sensing coil. The design heavily relies on the squeezing of the tubes to be able to overcome not only the attraction force between the ferrofluid and the exciting coil, but also to overcome the force of gravity and the friction between the tube and the ferrofluid.

Working principle of roller system in the tilt sensor, showing the device’s “at rest” state (a) and “tilting” state (b). This diagram shows how the mass, tubes, coils and rollers interact with each other during the tilting process
For this experiment the device was made to a larger scale than the actual device is intended to be. This is done to create an understanding of the accuracy of the device through experimental data. Preferably this device would actually be only millimeters in size for commercial use. Future designs of the device would consist of four tube and coil assemblies, rather than just one, attached to a single mass. This would allow for the sensor to detect tilt in the four directions of positive and negative x and y. A single tube and coil assembly was used in this paper to simply prove the validity of the design concept.
3 Fabrication
A majority of the tilt sensor components including the housing top, support piece, rollers, clips, and mass holder were fabricated with a 3D printer using Polylactic Acid material and assembled using epoxy. Only one of the rollers was attached to the support piece with a dowel initially. Most of the housing was made with wood for simplicity.
The non-flexible tube is made of a clear plastic, while the flexible tube is made of ether-based polyurethane. The tubes were connected using epoxy. The coils were then added to the assembly. Both the exciting and sensing coils were created with a small 24 gauge copper wire that allowed for a larger number of turns along the short distance. The number of turns for the exciting and sensing coils are 152 and 231 respectively. Figure 3 displays the fabricated tube assembly with and without the coils.

On the top is the tube assembly showing how the flexible and non-flexible tubes are attached. On the bottom is the tube and coil assembly showing the relative size and fabrication
The ferrofluid was then added to the tube and coil assembly prior to plugging one end. This allowed for easier insertion of the fluid. The plug is the clip as mentioned previously and was sealed using epoxy to prevent leaking. The other end of the tube was left open to the air.
The rod end of the tube assembly was attached, using tape, to the support piece and housing on the side opposite of the rollers. This was done to allow the tube to slide along the support piece when pulled. The flexible tube was then pushed against the first roller while the second roller was positioned on the other side of the tube and attached with a dowel.
The mass and holder assembly was attached to the housing using a cable and positioned at a specific distance, so that the clip connected to the housing and removed any slack from the tube. This allowed for a higher tilt sensitivity of the sensor. Figures 4 depicts the fully fabricated tilt sensor and its components.

Fully fabricated tilt sensor
4 Experimental setup
The experimental setup for testing was kept as simple as possible. It utilized the prototyped sensor, an iPhone tilt sensor, a function generator, and a National Instruments USB 6003 multifunctional data acquisition device (DAQ). The iPhone was attached to the top of the prototype tilt sensor and held so that it did not shift between tilts. The iPhone tilt sensor was used to measure the reference angles. The function generator was attached to the exciting coil and set with a 5 V and 75 kHz output. The sensing coil was then connected to the DAQ card to measure voltages as a function of time. A LabVIEW software was used to allow for the recording of generated voltages. Figure 5 shows the experimental setup including the developed tilt sensor and the iPhone as a reference device for tilt measurement.

Experimental setup of tilt sensor without data acquisition unit
The goal for this experiment was to test three aspects of the sensor. The first test was to record the output voltages at various angles to create a calibration curve. This curve could be used to create a guide for a user to accurately measure any angles within the range. The next test was to find the range of measurements the senor was capable of. The final aspect of the tests was to determine the repeatability of the sensor readings. If the voltages are not repeatable, it may be a sign that the ferrofluid initially moves a lot and then settles. In this case, the voltage measurement should not start until the fluid has fully settled. This experiment would also indicate other issues with the sensor such as fluid leaking from the gap between the rollers.
5 Results and discussion
Prior to characterizing the sensor, the functionality of the critical part of the sensor, the rollers, was checked. Specifically, the ferrofluid leakage through the rollers was visually monitored. The tube was initially clean and its color was yellow. When the ferrofluid which contained a black fluid moves into the tube, it would contaminate the inner surfaces of the tube and change its color to black. This was an indication to check whether or not the ferrofluid leaks from between the rollers. As shown in Fig. 6, the tube above the rollers is black and contains the ferrofluid, while its portion below the rollers is still yellow and contains no ferrofluid even after a long period of time.

Visual monitoring of the ferrofluid leakage through the rollers. The tube section below the rollers is empty and the tube section above the rollers is filled with ferrofluid, showing no leakage through the rollers
The tilt sensor was tested at various tilt angles from 0° to 70°. Figure 7 shows the graphs of generated voltages as a function of time when the sensor is tilted with the angles of 0° and 70°. Comparing these two cases, it is clear that the peak to peak voltages increase from 0° to 70° the angles of tilt. In addition, it was observed that the recorded voltages stayed consistent over the time span. In addition, the frequency of induced voltages in sensing coil was determined to be the same as the supplied frequency of 75 kHz in the exciting coil. This frequency was consistent in the tests performed for all angles of tilt. This is a similar effect in regular transformers where the secondary coil will have the same frequency as the voltage sent into the primary.

Output voltage of the tilt sensor as a function of elapsed time at 0° (a) to 70° (b) angle of tilt
Figure 8 displays peak to peak output voltages as a function of tilt angle. It is clear that the output voltage increases as the angle of tilt raises, however, the changes are not linear with the angle of tilt. As the angle increases to values above 30° the changes in voltage begin to decrease. This could be explained by the fact that the ferrofluid would not act similar to a solid magnetic metal in a magnetic field. For example, a ferrous core in a transformer is expected to transform all magnetic field generated by the primary coil to the secondary coil, although it would not even show one hundred percent efficiency in practice. When the ferrous core is replaced with a ferrofluid, the efficiency of transforming the magnetic field significantly diminishes as the ferrofluid goes away from the source of magnetic field induction. The ferrofluid contains several iron nanoparticles suspended in a fluid so that they may not be continuously connected to each other. This will reduce the effect of magnetic field transformation. Therefore, when the ferrofluid is pushed further towards the sensing coil by the rollers in the tilt sensor, parts of the ferrofluid that are farther from the exciting coil are less induced and may not be able to generate similar voltages compared with those closer to the exciting coil. This may cause the output of the sensor to be nonlinear with the angle of tilt. Furthermore, it was noticed that the voltages did not show further changes after 70° angle of tilt. This angle seemed to be the maximum point where the flexible tube would stretch. It can further explain the nonlinearity of the output voltages versus the angle of tilt.

Peak to peak output voltages as a function of tilt angle
6 Conclusions
This paper demonstrated a novel design for a tilt sensor by incorporating ferrofluid as a magnetic core through a transformer setup. The ferrofluid has unique characteristics of being a fluid as well as having a magnetic property. It was able to move between the two coils of the transformer setup, exciting and sensing coils, due to the force created by the tilting of the swinging mass. Upon titling, the mass pulls the flexible tube through a set of rollers, pushing the ferrofluid towards the sensing coil and inducing a voltage across it. The tilt sensor was designed using the Solidworks and most of its parts were fabricated using 3D printing techniques. The device was tested and characterized from 0° to 70° where the induced voltage changes were noticeable in the sensing coil. In addition, it was proved that there was no leakage of the ferrofluid through the gap between the two rollers. The size of the sensor is restricted by the tubes. For this sensor the longer the tubes the better the sensitivity. This may restrict how small future sensor designs can be, however, this issue may be resolved by adjusting the ratio of length to diameter of the tube. In addition, for the flexible tubing, shorter length may require more mass to stretch it. This may also be resolved by reducing the diameter of the tubes.
References
Ando B, Ascia A, Baglio S, Savalli N (2007) A novel ferrofluidic inclinometer. IEEE Trans Instrum Meas 56(4):1114–1123
Andò B, Baglio S, Beninato A (2010) Behavior analysis of ferrofluidic gyroscope performances. Sens Actuators A Phys 162(2):348–354
Andò B, Baglio S, Beninato A (2013) A ferrofluid inclinometer with a time domain readout strategy. Sens Actuators A Phys 202:57–63
Baltag O, Costandache D, Salceanu A (2000) Tilt measurement sensor. Sens Actuators A Phys 81(1–3):336–339
Bao H, Dong X, Gong H, Chan CC, Shum P (2009) Temperature-insensitive FBG tilt sensor with a large measurement range. In: 2009 Asia communications and photonics conference and exhibition, vol 2009. IEEE, pp 1–5
Barrera G, Tiberto P, Allia P, Bonelli B, Esposito S, Marocco A, Pansini M, Leterrier Y (2019) Magnetic properties of nanocomposites. Appl Sci 9(2):212
Berger P, Adelman NB, Beckman KJ, Campbell DJ, Ellis AB, Lisensky GC (1999) Preparation and properties of an aqueous ferrofluid. J Chem Educ 76(7):943
Blanpain R, Delapierre G (2005) Commissariat al Energie Atomique et aux Energies Alternatives, assignee. Microsystem using magnetometer and inclinometer for anti-theft protection of valuables. United States patent US 6,882,275
Bower K, Colon R, Karnyski C, Minkel J, Rashidi R (2018) Piezoelectric-based monitoring of restless legs syndrome (RLS). In: International conference on mechatronics and intelligent robotics. Springer, Cham, pp 923–930
Charlton PC, Mentiplay BF, Pua YH, Clark RA (2015) Reliability and concurrent validity of a smartphone, bubble inclinometer and motion analysis system for measurement of hip joint range of motion. J Sci Med Sport 18(3):262–267
Chen YL (2001) Application of tilt sensors in human-computer mouse interface for people with disabilities. IEEE Trans Neural Syst Rehabil Eng 9(3):289–294
Cotae C, Olaru R, Luca M, Creanga D (1997) Magnetic liquid sensor in orthogonal magnetic fields. Sens Actuators A Phys 59(1–3):222–225
Dai R, Stein RB, Andrews BJ, James KB, Wieler M (1996) Application of tilt sensors in functional electrical stimulation. IEEE Trans Rehabil Eng 4(2):63–72
Das S, Badal C (2019) A liquid pendulum based optical tilt sensor. Sens Actuators A Phys 285:543–549
Deng M, Zhao Y, Yin F, Zhu T (2016) Interferometric fiber-optic tilt sensor exploiting taper and lateral-offset fusing splicing. IEEE Photonics Technol Lett 28(20):2225–2228
Duell T, Muehlbauer M, Seitzinger T, Westfall J, Rashidi R (2018) MEMS capacitive sensor for wound monitoring applications. In: IOP conference series: materials science and engineering, vol 417, no. 1. IOP Publishing, p 012040
Ha DW, Park HS, Choi SW, Kim Y (2013) A wireless MEMS-based inclinometer sensor node for structural health monitoring. Sensors 13(12):16090–16104
Ha DW, Kim JM, Kim Y, Park HS (2018) Development and application of a wireless MEMS-based borehole inclinometer for automated measurement of ground movement. Autom Constr 87:49–59
Homa D, Pickrell G (2014) Magnetic sensing with ferrofluid and fiber optic connectors. Sensors 14(3):3891–3896
Huang Y, Wang T, Deng C, Zhang X, Pang F, Bai X, Dong W, Wang L, Chen Z (2017) A highly sensitive intensity-modulated optical fiber magnetic field sensor based on the magnetic fluid and multimode interference. J Sens 2017:1–7
Jung H, Kim CJ, Kong SH (2007) An optimized MEMS-based electrolytic tilt sensor. Sens Actuators A Phys 139(1–2):23–30
Lapadatu D, Habibi S, Reppen B, Salomonsen G, Kvisteroy T (2001) Dual-axes capacitive inclinometer/low-g accelerometer for automotive applications. In: Technical digest. MEMS 2001. 14th IEEE international conference on micro electro mechanical systems (Cat. no. 01CH37090). IEEE, pp 34–37
Liang TC, Ho JF, Wu PT (2018) A wireless tilt sensor based on plastic optical fiber and Arduino board microcontroller. Microsyst Technol 24(10):4101–4104
Mayer D (2015) An approach to measurment of permeability/permittivity tensor of ferrofluids. J Electr Eng 66(5):292–296
Medvegy T, Molnar A, Molnar G, Gugolya Z (2017) Analysis of a ferrofluid core differential transformer tilt measurement sensor. J Magn Magn Mater 428:189–193
Michelson T, Rudnick J, Baxter J, Rashidi R (2019) A novel ferrofluid-based valve-less pump. In: ASME 2019 international mechanical engineering congress and exposition. American Society of Mechanical Engineers Digital Collection
Middelhoek S, French PJ, Huijsing JH, Lian WJ (1988) Sensors with digital or frequency output. Sens Actuators 15(2):119–133
Nair S (2013) Industrial applications of ferrofluids. Chaos Complex Lett 7(1/2):99
Olaru R, Dragoi DD (2005) Inductive tilt sensor with magnets and magnetic fluid. Sens Actuators A Phys 120(2):424–428
Olaru R, Arcire A, Petrescu C, Mihai MM (2017) Study of the magnetic force delivered by an actuator with nonlinear ferrofluid and permanent magnets. IEEJ Trans Electr Electron Eng 12(1):24–30
Öztürk Y, Yariçi I (2019) Research on a novel magnetic tilt sensor designed using Hall elements and ferrofluid. J Electr Eng 70(5):406–411
Qian L, Li D (2014) Use of magnetic fluid in accelerometers. J Sens 2014:1–9
Raj K, Moskowitz B, Casciari R (1995) Advances in ferrofluid technology. J Magn Magn Mater 149(1–2):174–180
Rashidi R, Alenezi J, Czechowski J, Niver J, Mohammad S (2019) Graphite-on-paper-based resistive sensing device for aqueous chemical identification. Chem Pap 73(11):2845–2855
Resler EL Jr, Rosensweig RE (1964) Magnetocaloric power. AIAA J 2(8):1418–1422
Rosensweig RE (2013) Ferrohydrodynamics. Courier Corporation
Salamh PA, Kolber M (2014) The reliability, minimal detectable change and concurrent validity of a gravity-based bubble inclinometer and iphone application for measuring standing lumbar lordosis. Physiother Theory Pract 30(1):62–67
Scherer C, Figueiredo Neto AM (2005) Ferrofluids: properties and applications. Braz J Phys 35(3A):718–727
Su S, Li D, Tan N, Li G (2017) The study of a novel tilt sensor using magnetic fluid and its detection mechanism. IEEE Sens J 17(15):4708–4715
Toyoda M, Araki K, Suzuki Y (2002) Wave-front tilt sensor with two quadrant detectors and its application to a laser beam pointing system. Appl Opt 41(12):2219–2223
Volkova TI, Böhm V, Naletova VA, Kaufhold T, Becker F, Zeidis I, Zimmermann K (2017) A ferrofluid based artificial tactile sensor with magnetic field control. J Magn Magn Mater 431:277–280
Wang YL, Shi B, Zhang TL, Zhu HH, Jie Q, Sun Q (2015) Introduction to an FBG-based inclinometer and its application to landslide monitoring. J Civ Struct Health Monit 5(5):645–653
Welch D, Georgiou J, Christen JB (2013) Fully differential current-mode MEMS dual-axis optical inclination sensor. Sens Actuators A Phys 192:133–139
Yang C, Li G (2017) A novel magnet-actuated droplet manipulation platform using a floating ferrofluid film. Sci Rep 7(1):1–9
Yao J, Liu S, Li Z, Li D (2016) A novel ferrofluid inclinometer exploiting a hall element. IEEE Sens J 16(22):7986–7991
Yoshida T, Ohata K, Ueba M (2009) Highly accurate inclinometer robust to ultralow-frequency acceleration disturbances and applications to autotracking antenna systems for vessels. IEEE Trans Instrum Meas 58(8):2525–2534
Funding
This research was supported by Alfred State Applied Learning Program.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
There is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
DeGraff, A., Rashidi, R. Ferrofluid transformer-based tilt sensor. Microsyst Technol 26, 2499–2506 (2020). https://doi.org/10.1007/s00542-020-04790-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-020-04790-0