
Abstract
Widening the bandwidth and tunability are two of the major challenges associated with vibrational energy harvesting devices. This paper demonstrates a novel method involving embedding liquid into the mass which can be used to either widen the bandwidth or tune the frequency without significant decrease in power output. The paper builds upon previous research on using movable masses to widen the bandwidth. Various liquids including magnetic ferrofluid and Gallium-based liquid metal embedded masses were investigated. Ferrofluid location within the mass can be controlled using integrated hard magnet materials to tune and widen the bandwidth. Frequency tunability of 13.5% is demonstrated using ferrofluid with magnetic actuation. Bandwidth increase from 2.15 (non-movable mass) to 10.15 Hz with ferrofluid, and 17 Hz with liquid metal embedded mass was demonstrated without significant decrease in power output. Fill volume and applied acceleration significantly influence the bandwidth as they affect the percentage of movable mass as well as the force required to displace the liquid.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Vibration-based energy harvesting device research has been extensively investigated over the past decade and continues to be a topic of interest primarily due to the high demand to create self-sustaining systems for the Internet of Things (IoT) and cyber physical systems. Energy harvesting devices aim to replace batteries which are currently used to power these systems. In doing so, the systems will be self-sustaining as they will power themselves via the ambient environment. There are various methods of harvesting energy from the environment including photovoltaics, thermal, and vibrations. Vibrations are generated in most indoor and outdoor applications making vibration energy harvesting devices applicable to numerous applications. Piezoelectric and electromagnetic energy harvesting methods are the two most common forms of vibration energy harvesters. Both of which typically consist of a cantilever-based structure with either piezoelectric or electromagnetic power converting mechanism. Both macro and micro-scale devices are typically designed to have high Q-factor or narrow bandwidth (1–3 Hz) with low resonant frequencies (< 250 Hz) (Andosca 2012; Anton and Sodano 2007; Jackson et al. 2014; Shen et al. 2008), as most practical applications have low frequency and low acceleration (< 1 g). The high Q-factor causes the cantilever to increase its maximum displacement, which increases the stress in the piezoelectric film causing an increase in power generation. However, in practical terms this narrow bandwidth limits the amount of energy that can be harvested, because the applied frequency of the vibration source should match the resonant frequency of the cantilever beam in order to generate optimal power. Maximum power is best achieved when the cantilevers resonant frequency (fcantilever) is equal to the vibration frequency of the source (fsource).
Any deviation in the ratio results in reduced power. Off-resonant energy harvesting is possible but with reduced energy harvesting capabilities (Jackson et al. 2017). Optimal power harvesting is also dependent on the electrical circuit and can be optimized using maximum power point tracking.
Frequency mismatch between the vibration source and the cantilevers resonant frequency can be due to changes in the frequency spectrum over time or manufacturing deviations of the energy harvesting device. In MEMS vibration energy harvesters, the latter issue is a major issue with frequency variations of 0–10% due to manufacturing such as: layer thickness variations, photolithography variations, or topography issues (ie. sloped sidewalls etc.…) (Elfrink et al. 2011; O'Keeffe et al. 2013). Ideally the bandwidth will cover any variation in frequency due to manufacturing as well as any deviation in the frequency spectrum of the source.
Widening the bandwidth of vibration energy harvesters have been extensively investigated using various methods such as: non-linear duffing resonators (Cottone et al. 2009; Hajati and Kim 2011; Marinkovic and Koser 2012), mechanical stoppers (Liu et al. 2012; Olszewski et al. 2017), repulsive magnetic forces (Zhu et al. 2010), and designing an array of devices with varying frequency (Jackson et al. 2014). All these concepts have demonstrated an increased bandwidth at both the macro and micro-scale. However, most methods to widen the bandwidth operate by lowering the Q-factor, which significantly reduces the power density and limits the energy harvesting effectiveness. Recently an alternative method of increasing the bandwidth without significantly reducing the power density was demonstrated on the macro-scale. The mechanism was based on a movable mass that alters the center of gravity (CoG) causing dynamic tuning during cantilever oscillation resulting in a wide bandwidth effect (Jackson et al. 2015,2016a; Somkuwar et al. 2018). Rolling masses embedded in a structural mass have demonstrated significant bandwidth increase (Somkuwar et al. 2018; Chandwani et al. 2019; Porcar-Climent and Jackson 2020). Devices for low frequency and high acceleration applications have demonstrated an increase in bandwidth by using embedded liquid masses to generate CoG changes using water (Jackson et al. 2016a; Liu et al. 2019) and liquid metal (Jackson and Stam 2018). These papers demonstrated key factors that affect the frequency bandwidth due to a liquid sloshing effect including fill factor, viscosity, and density of the liquid. Ferrofluid-based sloshing effect in a macro-scale electromagnetic energy harvesting system has been used to harvest energy by creating a time-varying magnetic flux (Alazmi et al. 2016).
An alternative method of matching the frequency of the cantilever with the frequency of the vibration source is based on tuning the resonant frequency of the cantilever. However, methods of tuning the frequency are less investigated compared to widening the bandwidth. Tuning methods typically involve increasing stiffness of the beam through electrical methods or by using a functional material that is capable of altering its elastic modulus based on some external stimulus (Challa et al. 2008; Jackson et al. 2018; Rivadeneyra 2016). However, tuning capabilities are limited to a small change in resonant frequency (Jackson et al. 2018), and required functional materials that are not compatible with standard manufacturing or microfabrication processing.
This paper investigates using embedded liquid masses using ferrofluids and liquid metals (Galinstan™) to investigate methods of both widening the bandwidth and tuning the frequency of a macro-scale cantilever-based energy harvester. The aim of the paper was to demonstrate these effects using experimental analysis. The ferrofluid is denser than water, which should result in an increase in bandwidth compared to water based embedded masses. However, unlike water the ferrofluids location can be modified by applying a magnetic field. Embedded ferrofluids were used to tune the frequency as well as to increase the bandwidth, by using magnetic actuation mechanisms to control the liquid to a specific location along the length of the cantilever. A liquid filled mass was investigated because it is potentially easier to integrate into a micro-scale device using microfluidics in future applications. Rolling masses would require more complex fabrication techniques at the micro-scale. Whereas, previous attempts have demonstrated the capability of embedding liquids and powders into micro-scale devices (Jackson et al. 2016b). Ferrofluids have magnetic properties as they typically contain magnetic nanoparticles such as iron oxide, and their location can be controlled within the mass by applying a magnetic field at the desired location. A ferrofluid increases its density when an applied magnetic field is present. The overall CoG changes as the liquid moves within the mass thus creating a bandwidth increase effect and tuning can be accomplished by altering the fluids location within the proof mass. In addition, liquid metal is approximately 6 × denser than water thus its movement within the proof mass will have a larger influence on the CoG thus increasing the bandwidth. This paper demonstrates the increase in bandwidth of liquid metal and ferrofluids while also demonstrating the tuning properties of ferrofluids. The paper demonstrates the possible frequency effects of having an embedded liquid mass on an oscillating cantilever-based energy harvesting device.
2 Materials and methods
2.1 Concept
Typical vibration energy harvesters are based on a cantilever structure with a solid proof mass that is used to alter the resonant frequency. Traditional devices use a solid proof mass that has a constant CoG, where the frequency of the rectangular cantilever can be estimated using Euler–Bernoulli beam theory as demonstrated in Eq. (2).
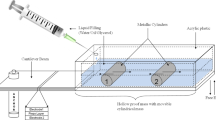
where E is the elastic modulus, m is the mass at a single point, w is the width of the beam, t is the thickness of the beam, and L is the length of the beam. However, adding liquid inside a hollow structural proof mass as shown in Fig. 1a alters the total mass to include a liquid mass (mL) component and the original proof mass of the hollow structure mo. The mass of the cantilever is typically negligible and is often not included in the total mass. Thus, the total mass is given by:

Schematic of energy harvesting device with embedded liquids. a Demonstrates static liquid embedded in structural mass having a central center of gravity, b demonstrates effect of dynamic liquid mass with central structural mass component and a movable mass component based on center of gravity of liquid, c demonstrates tuneable concept with central structural mass and liquid mass component whose Center of gravity depends on its location within the structural mass
The CoG location for the overall mass is defined by the mass components and their individual CoG lengths as follows:
where Lo is the length to the CoG of the proof mass, and LL is the length of the CoG of the liquid, which varies as the liquid moves. When the cantilever is at rest the CoG location of the liquid mass and the proof mass are approximately the same, if the hollow mass is symmetrical, and then the overall CoG location is defined by the proof mass. However, if the liquid inside the hollow proof mass is not centrally located due to dynamic movement or if the liquid is placed at a specific non-central location within the mass then Eq. (2) is not valid. In this case the resonant frequency of the beam can be applied using Rayleigh principle for a non-central point mass (Roylance and Angell 1979).
where r = (L-LCoG)/L and I is the moment of inertia for a rectangular beam. A more detailed description of the frequency analysis for a movable CoG was previously described (Jackson et al. 2016a; Somkuwar et al. 2018). Therefore, the addition of a liquid mass can act as both a tuning mechanism as well as a mechanism to increase the bandwidth as described below. Tuning can be accomplished by changing the CoG of the mass along the length of the cantilever beam as previously demonstrated using a movable point mass (Wu et al. 2008). If LCoG = L then Eq. (5) is simplified to the original formula for resonant frequency of a cantilever beam as shown in Eq. (2). Normalizing Eq. (5) results in an approximate resonant frequency change which is dependent on the new CoG location as demonstrated in the following formula:
2.2 Energy harvester setup
A commercial piezoelectric energy harvesting cantilever beam (Volture V25W, Mide) was used in this paper to validate the concepts at the macro-scale with beam dimensions of 4.6 × 3.81 × 0.06 cm3 (L, w, t). A custom-made proof mass was manufactured using plexiglass with hollow cavity dimensions of 2 × 2 × 2 cm3 with a wall thickness of 0.5 cm and a top lid thickness of 0.5 cm. The lid was secured using O-rings and four screws to prevent leaking. The structure was designed to be ~ 10 × scaled-up version of previously designed MEMS structures (Jackson et al.2013, 2014, 2017). The mass was attached to the piezoelectric cantilever, which was clamped to a vibration shaker (LW 139, Labworks), with an integrated accelerometer. Frequency and accelerations were controlled and altered depending on the experimental parameters. The output was connected to variable load resistor that was matched to the impedance of the cantilever in order to measure VRMS using an oscilloscope. The VRMS was then used to measure power based on the load resistor values. The bandwidth was estimated by fitting a Gaussian curve to the experimentally measured power as a function of frequency measurements. Then the full-width-half-maximum (FWHM) value was calculated as the bandwidth. Frequency sweeping hysteresis effects were further avoided by picking random discrete frequencies rather than sweeping the frequency to better mimic real-life frequency change applications.
2.3 Tuning mechanism
Tuning the resonant frequency using liquid filled mass can be accomplished by controlling the location of the liquid along the length of the cantilever. The mass component of the liquid alters the CoG of the proof mass according to Eq. (4), which will alter the resonant frequency according to Eq. (5). A Ferrofluid (iron oxide dispersed within a liquid) with density of 1.4 g/cm3 (before magnetized) was used to validate the tuning mechanism. Ferrofluids are attracted to an applied magnetic field, thus their specific location within the mass can be controlled by applying a magnetic field at different locations. The magnetic field was generated using NdFeB permanent magnets. A fill volume of 25–50% was investigated in order to allow for sufficient CoG changes due to the liquids mass. Ferrofluids density and viscosity changes due to an applied magnetic field. In this study the ferrofluids density increased to 3.28 g/cm3. Therefore, a liquid fill volume of 25–50% results in a movable mass percentage of 15–26.7% of the total mass. An applied magnetic field was generated which forced the ferrofluid to either the distal (free) end or the proximal (tethered) end of the proof mass.
2.4 Widening bandwidth mechanism
Widening the bandwidth occurs when the fluid inside the hollowed proof mass is allowed to move thus changing the overall CoG. A sloshing effect from the fluid occurs when the cantilever device is excited and starts to oscillate, and the force generated from the cantilever oscillation is greater than the friction force of the liquid to solid interface. As the fluid moves the CoG changes, which creates a dynamic tuning effect, meaning the resonant frequency of the device is continuously changing and the resonant frequency at any given point in time is dependent on the prior resonant frequency and the CoG change from that prior location. Therefore, as the device oscillates the fluids CoG changes resulting in continuously changing the resonant frequency of the cantilever for a given applied frequency. The sum of these individual resonant frequencies results in an effect that resembles widening the bandwidth, which the author refers to as dynamic tuning (DT). DT is a tuning effect that results in a widening of the bandwidth by using a movable CoG which continuously tunes the resonant frequency. The upper and lower boundaries of the widening effect is determined by the maximum and minimum CoG changes for a given design and movable mass.
Four different liquids were investigated to determine the effects of varying liquids on DT including: Ferrofluid, Gallium–indium–tin (liquid metal), iron rich dense water, and water. The density of the liquid will have a significant affect as the same volume of a dense liquid will contribute to a higher percentage of the overall mass, and thus a larger percent of the CoG will be changing. Previous studies have determined that viscosity is also important as it affects the acceleration required to cause sloshing (Jackson et al. 2016a). Ferrofluids were investigated due to their high density compared to water, but also due to their magnetic properties. The fluid on its own will cause a DT effect, but the addition of a magnetic field will force the fluid to move at a faster rate due to the additional applied force thus increasing the overall CoG change which will result in an increased bandwidth. The dynamic movement of the cantilever will generate a force which will cause the ferrofluid to move, once the fluid starts to move the magnetic field on the end of the mass will force the liquid to move towards that end thus resulting in a larger CoG change. Sloshing effects cause only small changes in CoG thus to increase the bandwidth they require very dense liquids (ie. Liquid metals). Ferrofluid experimental testing included varying acceleration along with applying a magnetic field to both the tethered and free end of the mass by using NdFeB magnets. In addition, glycerol/ferrofluid mixtures were investigated in order to alter the dynamics of the ferrofluid by using a liquid medium instead of air.
Liquid metal (Gallium–indium–tin) was investigated as a highly dense liquid (6.44 g/cm3). The metal is liquid at temperatures above − 19 °C and has viscosity similar to water 0.002 Pa-s (~ 2 × water). The liquid metal generates a larger CoG change due to increased movable liquid mass percentage. Fill volumes (FV) of 20–45% were used, which corresponds to an overall mass percentage of 21–38.5%. Gallium-based liquid metal oxidizes in air, which creates an oxide skin, which can prevent the liquid from moving, unless the oxide skin is removed or broken. Therefore, higher acceleration is typically required to break the oxide skin layer thus allowing the liquid to flow (Jackson and Stam 2018).
3 Results and discussion
Tuning the resonant frequency using ferrofluid filled mass with applied magnetic field was demonstrated in Fig. 2. The majority of the ferrofluid was oriented to the right side of the mass as shown by the dark ferrofluid. This demonstrates the capability of controlling the fluid location by using an applied magnetic field. Figure 3 demonstrates the average experimentally measured values of power as a function of frequency with a partially filled ferrofluid mass. The results in Fig. 3 consist of 50% ferrofluid with an excitation acceleration of 0.2 g. The resonant frequency change by varying the ferrofluid location from the free end to the tethered end was demonstrated in Fig. 3a. The results demonstrate that a tuning capability of 13.5% was achieved by moving the ferrofluid from the center to the free end. While a 11.5% change in frequency was measured by moving the liquid to the tethered end. Previous tuning mechanisms by adding weight or changing the elastic properties can only tune the frequency in one direction, other attempts of tuning using external forces to stiffen the cantilever have been demonstrated. Moving the ferrofluid towards the free end reduces the frequency as expected from Eq. (5). Figure 3b demonstrates tuning by varying the amount of ferrofluid at 25% and 50%. As expected, the 25% filled ferrofluid reduces the tuning capability as there was less mass change. Therefore, this demonstrates that tuning can be controlled by varying the concentration of ferrofluid. Adding more Ferrofluid will likely decrease the tuning capabilities as it would reduce the CoG changes by reducing the maximum displacement of the liquid within the mass. Using a higher density ferrofluid liquid would increase the tuning capabilities. Other methods that would also lead to increase tunability include reducing the proof mass weight as this would cause the liquid mass component to have a larger influence over the CoG location.

a Image of the experimental setup with cantilever, shaker, and oscilloscope, and b image of mass component demonstrating tuneable concept with ferrofluid located on one side of the structural mass held in place using hard magnets

Experimental results for frequency tunability using ferrofluid. a Demonstrates frequency tuning by altering the location of the ferrofluid in the mass, b demonstrates effect of varying the amount of ferrofluid at locations distal and closer to tethered end
Like other liquids the ferrofluid can be used to increase the bandwidth due to sloshing effects. Figure 4 compares power as a function of normalized frequency for (1) proof mass only device (control), (2) for water filled (50% FV), and (3) for ferrofluid (50% FV), at 0.3 g. The air or hollow proof mass results for the control sample demonstrate a FWHM of 2.15 Hz. Water filled mass demonstrated a FWHM of 3.55 Hz, which is consistent with previous results (Jackson et al. 2016a). The ferrofluid filled mass demonstrated an increased bandwidth of 4.44 Hz. This represents a 106% increase in bandwidth compared to the control, without a significant decrease in power. Power for the three devices were 4.01, 3.87, and 3.54 mW respectively. The normalized frequency was used in the graph in order to validate the increased bandwidth as the resonant frequency varied between devices due to difference in density of the liquid which changed the total mass.

Experimental results demonstrating bandwidth for various embedded liquids at 0.3 g
The bandwidth of the ferrofluid filled mass increases with acceleration values as demonstrated in Fig. 5. The FWHM value increased from 4.44 to 5.27 Hz when acceleration was increased from 0.3 to 0.5 g. This was due an increase in sloshing effects of the liquid, in addition if acceleration further increased then the liquid started to separate and hit the top of the lid. During separation the fluid was in free fall and thus did not contribute to the overall mass, which resulted in increased change in mass causing further widening effects.

Experimental results of bandwidth as a function of acceleration for 50% filled ferrofluid mass
The advantage of using ferrofluid was not only due to the higher density but also to the magnetic properties of the liquid. Applying a magnetic field during DT forces the liquid to move to one end similar to what was demonstrated in Fig. 3. Figure 6 demonstrates widening the bandwidth with and without applied magnetic field at varying accelerations. Figure 6a shows that at 0.3 g the FWHM of the magnetic induced fluid device was 7.08 Hz with applied magnetic field compared to 4.44 Hz without the applied magnetic field. In addition, Fig. 6b demonstrates that the FWHM was further enhanced to 8.95 Hz with an applied magnetic field at 0.5 g. The magnetic field produces an additional force that influences the movement of the fluid rather than just relying on acceleration force to move the liquid. The additional force accelerates the displacement of the ferrofluid and thus increases the CoG rate of change. The added force helped to obtain DT at a lower acceleration as the two forces combine to overcome the frictional forces. Figure 6c compares the ferrofluid with applied magnetic field as a function of acceleration. This demonstrates that bandwidth can be further increased by supplying an additional force, which causes the fluid to increase the rate of displacement. Combining this method with increased liquid density or lowering the proof mass weight can result in further bandwidth enhancement. The ferrofluid mass with magnets at 0.5 g demonstrated a bandwidth increase of 318%.

Power output as a function of normalized frequency with 50% filled ferrofluid mass with and without hard magnet actuation. a At 0.3 g, b 0.5 g, and c comparing 0.5 g with magnetic actuation
Most ferrofluids applications use a viscous solution medium such as glycerol or oils to act as a carrier fluid. Figure 7 demonstrates the effects of having a 100% fill volume with a certain concentration of ferrofluids 25% and 50% in a glycerol medium, with an applied 0.3 g with an applied magnetic field. A 100% fill volume of a single liquid will not widen the bandwidth as sloshing effects to cause CoG changes will not occur. However, a 100% fill volume containing two liquids can cause a CoG change by creating a sloshing effect of the denser liquid within the carrier liquid. The results show a FWHM value of 8.8 and 10.15 Hz for 25% and 50% filled ferrofluid in a glycerol solution. This demonstrates a significant enhancement from 7.08 Hz bandwidth for 50% fill volume using an air medium to 10.15 Hz bandwidth using a liquid medium. A multiple peak power was demonstrated, which was due to effects of sloshing and mixing effects from the glycerol and ferrofluid during dynamic movement and an applied magnetic force. This agrees with previous findings that demonstrated multi-frequencies for sloshing liquid mass (Liu et al. 2019). The power generated varied with time for a specific applied frequency as the fluid continues to move due to cantilever oscillation resulting in a change in the frequency mismatch overtime, which changes the power generated. Therefore, the power reported was an average power over a 1-min duration, which had a varying voltage amplitude, due to the cantilever going in and out of resonance mode.

Experimental results demonstrating bandwidth of a glycerol/ferrofluid embedded mass with varying amounts of ferrofluid at 0.3 g
Liquid metal has a much higher density than water or ferrofluid. The dense aqueous liquid was made by mixing Fe particles with water to make a dense liquid with low viscosity. The density of the Fe-based liquid was measured at 4.01 g/cm3. The acceleration applied was 0.75 g in order to overcome the oxide skin layer formed from the liquid–metal mass. The results demonstrated a FWHM value of 1.8, 4.2, 5.97, and 9.2 for no liquid, water, Fe-water, and liquid metal respectively. This demonstrates that the density of the liquid plays a significant role in determining bandwidth. In addition, no significant reduction in power was demonstrated.
Liquid metal demonstrated the capability of enhancing the bandwidth by increasing density of the liquid. Figure 8 demonstrates how the bandwidth was affected by varying acceleration. Higher acceleration (1 g) resulted in significantly enhanced bandwidth of 12.4 Hz with 25% fill volume. The multi-peak power output shown in Fig. 8 was due to the sloshing effect of the liquid metal, where high accelerations caused multiple waves to be present which changes the CoG and output power amplitude.

Liquid metal embedded mass with 30% fill volume with varying acceleration
As previously demonstrated in Fig. 7 the fill volume can be used to alter the amount of movement of the CoG. Since liquid metal has a high density, the CoG location was significantly affected for a liquid metal mass compared to a less dense liquid mass. Figure 9 demonstrates bandwidth effects of liquid metal with 20, 30, and 45% fill volume which represents a movable mass percentage of 21–38.5%. The FWHM value was increased to 17 Hz for a 45% fill volume of liquid metal with 0.75 g acceleration. This represents an 844% increase in bandwidth compared to the standard proof mass. Further enhancements can be generated by increasing density of liquid, reducing the mass of the original proof mass, or adding additional forces to enhance movement of the liquid movable mass.

Liquid metal embedded mass with varying fill volume at 1 g
4 Conclusion
In conclusion this paper demonstrates methods of both tuning and widening the bandwidth of a cantilever-based energy harvester using an embedded movable liquid mass. Tuning the resonant frequency was validated by controlling the location of the liquid using ferrofluids with an applied magnetic force. Widening the bandwidth was also validated for ferrofluids by using a DT method where the resonant frequency of the beam was continuously changing as the CoG changes due to displacement of the cantilever. This method of widening the bandwidth has the advantage of not significantly reducing the Q-factor thus high-power output was generated. Liquid metal filled mass demonstrated significant increase in bandwidth for low resonant frequency and low acceleration (< 1 g) devices. The bandwidth values were significant enough to cover resonant frequency variations due to manufacturing and should cover most frequency spectrum changes from the source. Long-term testing to determine the reliability of producing wide bandwidth results needs to be further investigated, but is difficult to assess without valid accelerated testing methods.
References
Alazmi S, Xu Y, Daqaq M (2016) Harvesting energy from the sloshing motion of ferrofluids in an externally excited container: analytical modelling and experimental validation. Phys Fluids 28(7):077101
Andosca R et al (2012) Experimental and theoretical studies on MEMS piezoelectric energy harvesters with mass loading. Sensor Actuat A-Phys 178:76
Anton S, Sodano H (2007) A review of power harvesting using piezoelectric materials (2003–2006). Smart Mater Struct 16(3):R1
Challa V, Prasad M, Shi Y, Fisher F (2008) A vibration energy harvesting device with bidirectional resonance frequency tunability. Smart Mater Struct 17:015035
Chandwani J, Somkuwar R, Deshmukh R (2019) Multi-band piezoelectric vibration energy harvester for low-frequency applications. Microsyste Technol 25(10):3867–3877
Cottone F, Vocca H, Gammaitoni L (2009) Nonlinear energy harvesting. Phys Rev Lett 2012(8):080601
Elfrink R, Matova S, De Nooijer C, Jambunathan M, Goedbloed M, van de Molengraft J, Pop V, Vullers RJM, Renaud M, van Schaijk R (2011) Shock induced energy harvesting with a MEMS harvester for automotive applications. In: 2011 international electron devices meeting. IEEE, Washington, DC, USA, pp 29.5.1–29.5.4
Hajati A, Kim S (2011) Ultra-wide bandwidth piezoelectric energy harvesting. Appl Phys Lett 99:083105
Jackson N, Stam F (2018) Sloshing liquid-metal mass for widening the bandwidth of a vibration energy harvester. Sensor Actuat A-Phys 284:17–21
Jackson N, O'Keeffe R, Waldron F, O'Neill M, Mathewson A (2013) Influence of aluminum nitride crystal orientation on MEMS energy harvesting device performance. J Micromech Microeng 23(7):075014
Jackson N, O'Keeffe R, Waldron F, O'Neill M, Mathewson A (2014) Evaluation of low-acceleration MEMS piezoelectric energy harvesting devices. Microsyste Technol 29(4–5):671–680
Jackson N, Stam F, Olszewski O, Houlihan R, Mathewson A (2015) Broadening the bandwidth of piezoelectric energy harvesters using liquid-filled mass. Eurosensors 120:328–332 (Procedia Engineering)
Jackson N, Stam F, Olszewski O, Doyle H, Quinn A, Mathewson A (2016a) Widening the bandwidth of vibration energy harvesters using a liquid-based non-uniform load distribution. Sensor Actuat A-Phys 246:170–179
Jackson N, Pedrosa F, Bollero A, Mathewson A, Olszewski O (2016b) Integration of thick-film permanent magnets for MEMS applications. J Microelectromech S 25(4):716–724
Jackson N, Olszewski O, O'Murchu C, Mathewson A (2017) Shock-induced aluminum nitride based MEMS energy harvester to power a leadless pacemaker. Sensor Actuat A-Phys 264:212–218
Jackson N, Kumar K, Olszewski O, Schenning A, Debije M (2018) Tuning MEMS cantilever devices using photoresponsive polymers. Smart Mater Struct 28:085024
Liu H, Lee C, Kobayashi T, Tay CJ, Quan C (2012) Investigation of a MEMS piezoelectric energy harvester system with a frequency-widened-bandwidth mechanism introduced by mechanical stoppers. Smart Mater Struct 21(3):035005
Liu D, Li H, Feng H, Yalkun T, Hajj M (2019) A multi-frequency piezoelectric vibration energy harvester with liquid filled container as the proof mass. Appl Phys Lett 114(21):213902
Marinkovic B, Koser H (2012) Demonstration of wide bandwidth energy harvesting from vibrations. Smart Mater Struct 21:065006
O'Keeffe R, Jackson N, Waldron F, O'Neill M, McCarthy K, Mathewson A (2013) Investigation into modelling power output for MEMS energy harvesting devices using COMSOL MultiphysicsR. In: 2013 14th international conference on thermal, mechanical and multi-physics simulation and experiments in microelectronics and microsystems (EuroSimE). IEEE, Wroclaw, Poland, pp 1–6
Olszewski O, Houlihan R, Blake A, Mathewson A, Jackson N (2017) Evalulation of vibrational PiezoMEMS harvester that scavenges energy from a magnetic field surronding an AC current-carrying wire. J Microelectromech S 26(6):1298–1305
Porcar-Climent A, Jackson N (2020) Rolling mass for wide bandwidth vibration energy harvesting. In: Proceedings of PowerMEMS, Krakow (in press)
Rivadeneyra A et al (2016) Tunable MEMS piezoelectric energy harvesting device. Microsyste Technol 22(4):823–830
Roylance L, Angell J (1979) A batch-fabricated silicon accelerometer. IEEE Trans Electron Devices 26(12):1911–1917
Shen D, Park J, Ajitsaria J, Choe S, Wikkle H, Kim D (2008) The design fabrication and evaluation of a MEMS PZT cantilever with an integrated Si proof mass for vibration energy harvesting. J Micromech Microeng 18:055017
Somkuwar R, Chandwani J, Deshmukh R (2018) Wideband auto-tunable vibration energy harvester using change in centre of gravity. Microsyste Technol 24(7):3033–3044
Wu X, Lin J, Kato S, Zhang K, Ren T, Liu L (2008) A frequency adjustable vibration energy harvester. In: Proceedings of PowerMEMS. Sendai, Japan, pp 245–248
Zhu D, Tudor M, Beeby S (2010) Strategies for increasing the operating frequency range of vibration energy harvesters: a review. Meas Sci Technol 21:022001
Acknowledgements
The author would like to thank the members of the SMART Group at the University of New Mexico, and Frank Stam at the Tyndall National Institute in Cork, Ireland for their support. The research was partially funded by the Research Investment Award at University of New Mexico.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Jackson, N. Tuning and widening the bandwidth of vibration energy harvesters using a ferrofluid embedded mass. Microsyst Technol 26, 2043–2051 (2020). https://doi.org/10.1007/s00542-020-04756-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-020-04756-2