
Abstract
This paper presents the design, fabrication and experimental characterization of an electro-thermally actuated microgripper suitable for single-cell manipulation. The analysis of the mechanical properties of cells is of great interest both in medicine and biology because the study of the cellular mechanical behaviour and resistance is necessary in these fields. Microgrippers (Bio-MEMS) have an important role in the manipulation of biological tissues and cells. In recent works, the research group simulated the mechanical behavior of grippers and the different actuation strategies. Considering the dimensional specifications and targets imposed by actuation and biocompatibility, in this paper, a microgripper based on electro-thermal actuation is studied. Starting from previous numerical results, a novel SU8 structure is designed and realized according to the micro-fabrication constraints and then the structure is simulated using the finite element method (FEM)-based thermo-structural simulations in ANSYS. Therefore, the fabrication method and steps are presented and the gripper has been developed and tested. Finally, the tip displacements of the gripper, electro-thermally actuated in different operating conditions, are compared with those obtained by means of numerical FEM simulations. A good agreement is obtained between simulations and experimental results.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The study of mechanical properties of cells is of great interest because of its important implications for understanding the cellular model and the correlation between illness and genetic alterations (Darnell 1990a, b). The mechanical characterization of cells helps scientists in the study of cellular resistance and behaviour in case of different solicitations. Cells are different in sizes and shape, and are in the range of 10–30 μm in diameter, so a fine cell mechanical analysis can be performed by means of micro electro-mechanical systems (MEMS) that are able to support studies not only on populations of a few million cells, but also on a single cell. MEMS technology offers many advantages in the study of the mechanical properties of cells, such as the compatibility of the device dimensions with the characteristics of the single cell, the possibility of applying forces to a wide range (from pN to μN), and the possibility of analyzing single cells both adherent to the substrate and in suspension. The choice of the fabrication process related to material biocompatibility and the actuation method related to kinetics and forces have to be considered in the preliminary design of a cell microgripper. These main aspects affect the architecture and dimension of the final device. In terms of the actuation methods, two different strategies (internal and external) that can be used for the opening and closing of the microgripper are possible and are presented in literature (Thielicke and Obermeier 2000; Ouyang et al. 2008).
In general external actuators, where the microstructure device is realized apart from the actuators, biocompatibility is intrinsically guaranteed. Among these, in literature, piezo-motors represent the most promising solution for this application with small size and high precision, but major design difficulties involve the mechanical joint between the motor and the micro-device (Chan et al. 2012). Internal design actuation leads to a more compact design of the assembled device and its main driving principles, presented in literature, include piezoelectric, electrostatic and electromagnetic, shape memory alloy and electro-thermal. It is possible to realize with a piezoelectric (PZT) material, a specific part of the gripper structure to apply a localized internal actuation force (Nah and Zhong 2007; Zubir et al. 2009). PZT actuators introduce hysteretic nonlinearity and require high actuation voltage with a small motion range, and may cause a mechanical fatigue problem. Another internal device actuation is obtained by using MEMS typical electrostatic force (Beyeler et al. 2007; Volland et al. 2002; Chang 2006; Chen et al. 2010) by means of comb drives or a capacitor with movable arms.
Electrostatic actuators are generally disadvantaged by the small force and dimensions of capacitors. Electrostatic actuation cannot be used in a biological medium because the applied voltage can cause electrolysis when a microgripper is operated in an aqueous environment. Internal micro-coils are used to generate electromagnetic actuation (Giouroudi et al. 2008) but with a weak force and small motion due to the small power per unit volume. Shape memory alloy (SMA) actuators (Kohl and Skrobanek 1998; Kohl et al. 2002), mainly used at a meso-scale, could give a faster response of the arms. Major drawbacks are the difficulty to control the actuator with precise steps and the low materials fatigue resistance of the SMA (Huang 2002) that can only operate for a very limited cycle time. The thermal actuation approach makes large displacement possible under relatively low voltage and is based on the thermal expansion of a specific mechanical part of the gripper due to the Joule effect applying electric currents (Nguyen et al. 2004; Ivanova et al. 2006; Volland and Ivanova 2007; Deutschinger et al. 2010; Andersen et al. 2008). One of the major drawbacks is the possibility of high temperature in the region close to the cells. To extend the use of thermal actuation to biological manipulation, the gripper structure must be designed to dissipate the heat produced by the actuators without damaging the zone near the cell. An interesting and promising thermal gripper has been proposed and characterized in Zhang et al. (2012) and Solano and Wood (2007). In Solano et al. (2008) and Daunton et al. (2014) experimental results have been reported to demonstrate the operation of the device in real environments in micro-manipulation of cells submerged in a biological fluid.
In the present paper, a novel skeletal geometry of the microgripper based on electro-thermal actuation is studied. The structure, firstly presented by the authors in Iamoni and Somà (2013) is realized in SU8 and shows a very good elastic and biocompatible behavior. The structural rigidity, chemical resistance and high coefficient of the thermal expansion makes SU8 an ideal material for the application of the proposed microgripper design both in liquid and air for the manipulation and mechanical characterization of the cells. The new gripper structure is designed based on a skeletal compliant mechanism to enhance the advantages of electro-thermal actuation such as large deformation with low operating temperature and very low current actuation (Iamoni and Somà 2013, 2014). Recently we reported the development and characterization of SU8 electro thermal microgrippers based on some simple designs (Al Zandi et al. 2016, 2017; Voicu and Muller 2013a, b).
In addition for cell manipulation the specific gripper design presented in this paper could also be used for micromanipulation of target micro particles by placing an individual particle onto the tip of a resonator cantilever for testing and weighing (Chan et al. 2014).
In the following paragraphs the numerical FEM mechanical model has been used to simulate the different actuated conditions of the gripper, the fabrication steps and strategy are described and the process constraints are considered together with the design procedure. The experimental characterization of an electro-thermally actuated microgripper, suitable for single-cell manipulation, has been carried out to determine gripper displacement with the associated actuation voltage and the resultant heater temperature. Higher displacement in the microgripper end-effector with low actuation voltages and temperature rise is demonstrated both through FEM simulations and experimental characterization.
2 Gripper design and FEM simulation
Main goal of the paper was to design an electro-thermal microgripper, taking into account fabrication constraints in terms of dimension, aspect ratio and material properties. From a system engineering point view, all these aspects have to be considered in the preliminary design of a cell microgripper. As previously introduced, the work was based on the electro-thermal actuation strategy (Iamoni and Somà 2013, 2014).
Schematically, the idea to design a novel microgripper utilizes one main skeleton for the moving structure and a shaped end effector to manipulate and gripping cells.
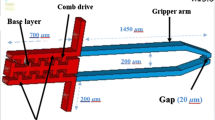
In this type of design, the so-called “hot arms” of the skeleton allow the incorporation of metal heaters. The effect of the temperature elongates the metal heaters causing an opening of the end effector. The design shape originally studied in previous work (Iamoni and Somà 2013) has been realized to be suitable to have a shape of the end effector proper for single cell manipulation. The SU8 polymer was used for the skeletal structure of the microgripper. The SU8 material has good mechanical and chemical properties as shown in Table 1, as well as other desirable properties such as biocompatibility, ease of fabrication and low cost. The heater was realized in a Cr/Au/Cr alloy thin layer. The structural design was realized with a CAD, and structural simulation was carried out using a FEM-based software tool (ANSYS). The skeletal structure can be inserted in the frame of compliant structures, where particular attention has been given on the mechanical arm shape to minimize the stress concentration factor effects. Figure 1 shows the schematic geometry and dimension of the proposed SU8 microgripper.

Design layout of the electro-thermal microgripper, all dimensions in microns
The metal heaters were positioned at the neutral axis of the hot beams to prevent out of plane bending while heating and operating the “hot arms” of the skeleton. Thermal actuation of the gripper was obtained by means of Cr/Au/Cr-based heaters embedded in the middle of the SU8 arms. Figure 2 shows the layout of the heaters (outlined in yellow color) in the gripper model for FEM simulation. In the simulation work, thermal constraints were applied to the gripper structure and a temperature was applied to the heaters. The width of the heater line on the two actuation arms was the same as that of the SU8 beams (20 µm), while the width of the metal line in the middle arm was designed to be 10 µm, to ensure circuit isolation after fabrication.

The FEM model and the position of the heaters (in yellow color) embedded in the middle of SU8 arms
2.1 FEM simulations
The preliminary numerical model was refined taking into account the effective dimensions of the device experimentally obtained by means of profilometer measurements.
During simulation, the outer arms (labeled in Fig. 2) of the gripper were set at room temperature (25 °C) while the metal lines (heaters) on the central arms were subjected to the desired temperatures. The temperature values obtained in the metal lines depended on the applied voltage, and hence, the current flowing through the heaters. In the simulation work, the electro-thermal effect was represented using the corresponding temperature in the metal lines.
The performance of the proposed microgripper design was determined by performing electro-thermal simulations in ANSYS. The model has been realized by using 3D elements Solid98 suitable for thermo-structural simulation. FEM mesh refinement of the model has been firstly evaluated in term of energetic convergence criteria and thereafter numerical results have been compared with experimental results.
The thermal constraints were applied such that the external cold arms were at room temperature while the central hot arms were subjected to different temperatures depending on the applied voltage, and hence, the current flowing through the heaters. In the simulation, four different opening zones for the gripper tip were considered as shown in Fig. 3. The ‘AB’ and ‘GH’ openings were considered as the reference since a cell can be held precisely only if it has a diameter lower than ‘AB’ and higher than the ‘GH’ distance.

Opening zones of the gripping end effector
The results of FEM simulation in Fig. 3 show that the due to the thermo-mechanical axial expansion the tip shows two main kinematical behaviors: a vertical opening that could receive the cell and a prolongation effect. Due to the specific geometry of the design the kinematic behavior could be a benefit in capturing and receiving the cell during gripping operations.
Finite element thermo-structural simulation was performed using different temperature values of the metal lines. Figure 4 shows the results of displacement of the gripping zone, corresponding to the positions shown in Fig. 3. The results show a linear behavior between the temperature of the hot arms and the increase in the gripper tip openings. The maximum heater temperature was set below the softening point of the SU8 materials (i.e. 210 °C).

End effector displacements vs hot arms temperature
As discussed previously, one possible concern of using thermal actuation for biological particles is that excessive temperature rise at the gripper jaws could damage or destroy the cell, so it was necessary to study the temperature distribution along the gripper arms.
Figure 5 shows the temperature distribution within the microgripper structures when the heater temperature was set at 110 °C. The temperature range in the gripping zone was between 25 and 34.4 °C, lower than the maximum temperature (37 °C) a cell can withstand without changing its biological/mechanical properties and behavior. Thus the lower temperature at the gripper tips will not have an detrimental effect on cells or heating up the environment for example, a liquid medium.

Temperature distribution along the microgripper
3 Fabrication
The microgripper was fabricated using surface micromachining and a three photomasks process. The photomasks were designed using a layout editor (Clewin). One mask was used for the fabrication of the SU8-based gripper structure, one for the fabrication of the heater metallic lines and contact pads and the last for the selective removal of the top SU8 to expose the contact pads for electrical connections. As described in Sect. 2, the SU8 polymer was used as the structural material and chromium and gold thin films were used to form the heater lines by lift-off technique (Al Zandi et al. 2016, 2017; Voicu et al. 2007, 2013, 2016; Voicu and Műller 2013; Voicu 2016). An Omnicoat layer was applied as a sacrificial material to release the microgripper structures from the substrate. Figure 6 presents the fabrication process developed for SU8-based electro-thermal microgrippers. Silicon wafers were used as substrates. The silicon wafers were cleaned in piranha solution, rinsed using deionized (DI) water and dried. First, a thin layer of Omnicoat was deposited on thin layer of Omnicoat was deposited a silicon wafer and baked at 200 °C on a hotplate for 2 min (Fig. 6a). Second, a SU8 layer was deposited on the Omnicoat layer. The deposition conditions were controlled to produce a thickness of about 10 µm for the SU8 layer (Fig. 6b). After SU8 deposition, the wafer was soft baked at 65 °C followed by post-baking at 95 °C. After, the SU8 layer was patterned in a photolithography process using the mask for fabrication of the gripper structure as shown in Fig. 6c. After exposure the wafer was baked again at 65 and 95 °C, and then developed to obtain the gripper structure. In Fig. 7 is presented a SEM picture of the first SU8 layer of the microgripper. It shows that the gripper structure is well defined after fabrication. To test the release process, the wafer was immersed in the stripper developer to remove the Omnicoat layer. Figure 8 shows an optical image of a square SU8 rim with 6 microgrippers. To create heater lines over the first layer of the SU8 grippers, the lift-off technique was used. An AZ photoresist layer was deposited, exposed and then patterned. Then thin films of Cr/Au/Cr were deposited in sequence by a sputtering method. The thicknesses of the metal films were 10, 300 and 10 nm, respectively. The chromium films were used as adhesion layers. The heater lines were defined after the AZ photoresist was removed in the lift-off process (Fig. 6e). In the next step, the second SU8 layer was deposited on the wafer. The deposition and processing conditions were the same as for the first layer. The SU8 layer was exposed to UV after aligning the configured gripper structure on the photomask. The SU8 layer was developed to obtain the microgrippers (Fig. 6e). In Fig. 6e, the light-grey parts show a schematic cross-section of the metal heaters embedded, at the neutral flexural axis, in the hot-arm beams. A final hard-bake process was carried out to complete the cross-linking process for the SU8 material (Al Zandi et al. 2016, 2017; Voicu and Muller 2013a, b; Voicu et al. 2007, 2016; Voicu 2016). Figures 7 and 8 present optical images of one of the fabricated microgrippers on the silicon wafer. From Fig. 8 can be observed that the gripper arms and the heater lines are all clear and there is no unwanted bridging, between the SU8 beams and the metal lines.

Schematic of the three-mask process for fabrication of the microgrippers (cross-section view of the arms)

First SU8 configured layer (SEM photo)

One structure with the configured SU8 and metal layers (optical microscope photo)
In the final fabrication step, the SU8 microgrippers were released from the silicon wafer, using a developer and the piranha solution to remove the Omnicoat sacrificial layer between the SU8 microgrippers and the silicon wafer. Figures 9 and 10 show the optical pictures of six grippers on a square SU8 frame. The holes (Fig. 10) were designed to allow easy access of the solution to the Omnicoat lay allow a fast realize of the chip with six grippers structures from the silicon substrate.

A chip with six SU8 configured and released structures (first SU8 layer)

One released chip with six structures at the final step of fabrication (camera photo)
4 Experimental characterization
For testing and characterization, individual microgrippers were obtained by dicing the gripper array, shown in Fig. 10, using a sharp knife cutter. Then each microgripper was attached to a microscope slide as the substrate using an epoxy adhesive. The gripper was aligned to the short edge of the glass slide with the microgripper arms suspended beyond the edge of the slide, for measurement of displacement of the microgripper jaws under electro-thermal actuation. Electrical connections between the thin wires and the contact pads of the gripper were made using a silver-loaded epoxy adhesive. The thin wires were then soldered onto a PCB board, which was also mounted on the glass slide to facilitate easy connections to a power supply using more rigid wires. To obtain the relationships between the applied voltage, the heater temperature and the resultant gripper displacement, the temperature coefficient of resistance (TCR) of the gold microheater was measured independently. For this purpose, the microgripper was mounted inside a small chamber, which was then placed on a hotplate as the heat source. A thermocouple was used as the temperature sensor and was placed near the microgripper in the chamber to monitor the temperature in the heated chamber. Figure 11 shows the results of the resistance of the microheater over the temperature range of 22 and 84 °C. It shows that there is a linear relationship between the resistance and temperature. The dashed line was the corresponding linear regression. The TCR of the heaters was 1.53 × 10−3/°C. The result shows that the TCR of the gold thin film heaters was significantly smaller than that of the bulk material (i.e. 3.4 × 10−3/°C) (Loughlin 1993). Based on the measured value of the TCR for the integrated gold microheaters in the microgripper, the heater temperature can be calculated using the measured resistance of the heaters at a given actuation voltage.

Resistance of the gold micro-heaters on the gripper measured as a function of temperature. The dashed line is a linear fit to the experimental results
The displacement measurements of the microgripper jaws were carried out using a robotic system. The microscope slide substrate with the gripper was mounted on a platform on a hexapod-based motion system, which was used to position the microgripper under an optical microscope-based vision system with a camera. A 20× microscope objective was used for the experimental characterization.
The microgripper was connected to a 200 Ω resistor in series and then connected to a voltage source. Two multimeters were used to measure the voltage applied to the microheater and the current of the microheater. The gripper displacement was measured using a calibrated imaging system capable of tracking the different positions of the microgripper jaws. Figure 12 shows the tracking pictures of the positions of the gripper tips before and after an actuation voltage of 0.65 V was applied to the microgripper. Figure 13 shows the results of simulation and measurements of the displacement between AB and GH, as shown in Fig. 3, as a function of the applied voltage. The simulation results of the temperature at the positions of G and H as well as A and B on the gripper jaws are also shown in Fig. 13. The displacement was negligible when the voltage was below 200 mV. However, at actuation voltage higher than 200 mV, there was a linear relationship approximated between the displacement and the applied voltage. The displacement values for AB and GH were about 20 and 17 µm, respectively. The initial openings between AB and GH were 30.5 and 30.1 µm, respectively, and openings of 50.5 and 47.8 µm were obtained at the actuation voltage of 650 mV. The heater temperature was calculated using its resistance obtained from the results of voltage and current measurements, and the values of the TCR were determined from the results shown in Fig. 11.

Optical pictures of the gripper jaws showing independent tracking of the gripper tips (green box), corresponding to zero voltages (a, c) and to an actuation voltage of 0.65 V (b, d)

Results of the total displacement between the gripper jaws measured for two different positions between AB and GH (as shown in Fig. 4) and the heater temperature as function of the applied voltage
Figure 14 shows the gripping zones displacements as a function of the heater temperature. The displacement values are related to both the FEM model and experimental results. The comparison shows a good agreement between the results of simulation and the experimental work.

Comparison of the FEM model and experimental results for the microgripper tip displacement at different heater temperatures
5 Conclusion
In this paper, the design, FEM modeling and experimental characterization of a cell microgripper suitable for single cell manipulation are presented by evaluating the system requirements and actuation strategy. The design architecture is a skeletal compliant structure realized in SU8. The proposed electro-thermal actuation is designed and optimized by means of the finite element method. The main central beam structure of the gripper is actuated to have a low temperature in the cell gripping zone that makes this micro-device innovative, not conventional and especially suitable also in the bio- and micro-mechanical applications. The fabrication steps, using the SU8 micro manufacturing and fabrication steps are also presented and described in this paper. The gripper opening displacements were measured and the results are presented with respect to the actuation voltages and resultant temperatures. The proposed microgripper design showed maximum displacement of 50.5 µm at a very low actuation voltage of 650 mV. In the experimental testing, temperature dependence of the resistance was measured and used to obtain the real operating temperatures confirming that the measured TCR of the gold films is much smaller than that of the bulk material. Numerical and experimental comparison of the gripper opening displacements showed a very good agreement in all of the actuation temperature ranges.
References
Al Zandi M, Voicu R-C, Muller R, Wang C (2016) Testing and characterisation of electrothermal microgrippers with embedded microheaters. In: Proc. of symposium on design, test, integration & packaging of MEMS/MOEMS-DTIP2016, Budapest, pp 256–260
Al-Zandi M, Wang C, Voicu R, Muller R (2017) Measurement and characterisation of displacement and temperature of polymer based electrothermal microgrippers. Microsyst Technol. doi:10.1007/s00542-017-3298-8
Andersen KN, Carlson K, Petersen DH, Mølhave K, Eichhorn V, Fatikow S, Bøggild P (2008) Electrothermal microgrippers for pick-and-place operations. Microelectron Eng 85:1128–1130
Beyeler F, Neild A, Oberti S, Bell DJ, Sun Y, Dual J, Nelson BJ (2007) Monolithically fabricated microgripper with integrated force sensor for manipulating micro-objects and biological cells aligned in an ultrasonic field. J Microelectromech Syst 16(1):7–15
Chan B-D, Mateen F, Chang C-L, Icoz K, Savran CA (2012) A compact manually actuated micromanipulator. J Microelectromech Syst 21(1):7–9
Chan B, Icoz K, Huang W, Chang C, Savran CA (2014) On-demand weighing of single dry biological particles over a 5-order-of-magnitude dynamic range. Lab Chip 14(21):4188–4196
Chang H-C, Tsai JM, Tsai H-C, Fang W (2006) Design, fabrication, and testing of a 3-DOF HARM micromanipulator on (111) silicon substrate. Sens Actuators A 125:438–445
Chen T, Sun L, Chen L, Rong W, Li X (2010) A hybrid-type electrostatically driven microgripper with an integrated vacuum tool. Sens Actuators A 158:320–327
Darnell L (1990a) Baltimore, [molecular cell biology], scientific American books. W. H. Freeman and Company, New York, pp 681–951
Darnell L (1990b) Baltimore, [molecular cell biology], scientific American books. W. H. Freeman and Company, New York, pp 617–638
Daunton R, Wood D, Gallant AJ, Kataky R (2014) A microgripper sensor device capable of detecting ion efflux from whole cells. RSC Adv 4:50536–50541
Deutschinger A, Schmid U, Schneider M, Brenner W, Wanzenböck H, Volland B, Ivanov Tzv, Rangelow IW (2010) Characterization of an electro-thermal micro gripper and tip sharpening using FIB technique. Microsyst Technol. doi:10.1007/s00542-010-1110-0
Giouroudi I, Hötzendorfer H, Kosel J, Andrijasevic D, Brenner W (2008) Development of a microgripping system for handling of microcomponents. Precis Eng 32:148–152
Huang W (2002) On the selection of shape memory alloys for actuators. Mater Design 23:11–19
Iamoni S, Somà A (2013) Design of cell microgripper and actuation strategy. In: Bio-MEMS and medical microdevices, Grenoble
Iamoni S, Somà A (2014) Design of an electro-thermally actuated cell microgripper. Microsyst Technol 20:869–877
Ivanova K, Ivanov T, Badar A, Volland BE, Rangelow IW, Andrijasevic D, Sümecz F, Fischer S, Spitzbart M, Brenner W, Kostic I (2006) Thermally driven microgripper as a tool for micro assembly. Microelectron Eng 83:1393–1395
Kohl M, Skrobanek KD (1998) Linear microactuators based on the shape memory effect. Sens Actuators A 70:104–111
Kohl M, Brevet B, Just E (2002) SMA microgripper system. Sens Actuators A 97–98:646–652
Loughlin C (1993) Sensors for industrial inspection. Springer, Berlin
Nah SK, Zhong ZW (2007) A microgripper using piezoelectric actuation for micro-object manipulation. Sens Actuators A 133:218–224
Nguyen N-T, Ho S-S, Low CL-N (2004) A polymeric microgripper with integrated thermal actuators. J Micromech Microeng 14:969–974
Ouyang PR, Tjiptoprodjo RC, Zhang WJ, Yang GS (2008) Micro-motion devices technology: the state of arts review. Int J Adv Manuf Technol 38:463–478
Solano B, Wood D (2007) Design and testing of a polymeric microgripper for cell manipulation. Microelectron Eng 84:1219–1222
Solano B, Rolt S, Wood D (2008) Thermal and mechanical analysis of an SU8 polymeric actuator using IR thermography. Proc Inst Mech Eng part C 222:73–86
Thielicke E, Obermeier E (2000) Microactuators and their technologies. Mechatronics 10:431–455
Voicu R-C (2016) Design, numerical simulation and experimental investigation of an SU-8 microgripper based on the cascaded V-shaped electrothermal actuators. J Phys Conf Series (JPCS) 757(1):012015
Voicu R, Muller R (2013) “New electro-thermally actuated micromanipulator with optimized design and FEM simulations analyses’’. In: Design, test, integration & packaging of MEMS/MOEMS (DTIP), pp 1–6
Voicu R, Műller R (2013) Design and FEM analysis of a new micromachined electro-thermally actuated micromanipulator. Analog Integr Circ Sig Process 78(2):313–321
Voicu R, Esinenco D, Müller R, Eftime L, Tibeica C (2007) Method for overcoming the unwanted displacements of an electro-thermally actuated microgripper. In: Proceedings of the 3rd International conference on multi-material micro manufacture-4M 2007, Borovets, Bulgaria, pp 39–42
Voicu R-C, Tibeica C, Müller R, Dinescu A, Pustan M, Birleanu C (2016) Design, simulation and testing of polymeric microgrippers with v-shaped electrothermal actuators and encapsulated hetaira. In: Proc. of IEEE international semiconductor conference CAS 2016, 10–12 October Sinaia, 2016, pp 89–92
Volland BE, Heerlein H, Rangelow IW (2002) Electrostatically driven microgripper. Microelectron Eng 61–62:1015–1023
Volland BE, Ivanova K, Ivanov Tzv, Sarov Y, Guliyev E, Persaud A, Zöllner JP, Klett S, Kostic I, Rangelow IW (2007) Duo-action electro thermal micro gripper. Microelectron Eng 84:1329–1332
Zhang R, Chu J, Wang H, Chen Z (2012) A multipurpose electrothermal microgripper for biological micro-manipulation. Microsyst Technol 19(1):89–97
Zubir MNM, Shirinzadeh B, Tian Y (2009) A new design of piezoelectric driven compliant-based microgripper for micromanipulation. Mech Mach Theory 44:2248–2264
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Somà, A., Iamoni, S., Voicu, R. et al. Design and experimental testing of an electro-thermal microgripper for cell manipulation. Microsyst Technol 24, 1053–1060 (2018). https://doi.org/10.1007/s00542-017-3460-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-017-3460-3