
Abstract
We present a human-limb driven piezoelectric energy harvester using two mass-loaded unimorph piezoelectric beams clamped on two flexible sidewalls. Since vibration generated by human-limb motion has low-frequency and high amplitude characteristics, the energy harvester has been designed to up-convert the low-frequency human-limb vibration by mechanical impact of a spring less spherical metallic ball. However, instead of direct mechanical impact on the power generating elements (unimorph piezoelectric beams), the ball impacts on the bases (flexible sidewalls) of each beam to avoid mechanical wear of the piezo-materials. While excited by human-limb motion, the ball impacts consecutively on the flexible sidewalls which transfer impulsive forces to the loaded mass of the respective unimorph beam. The beam vibrates at its own resonant frequency and causes voltage generation by virtue of piezoelectric effect. A proof-of-concept prototype has been fabricated and tested. At optimum load condition, each unimorph piezoelectric generator generates 96 µW average power while excited at 4.96 Hz frequency and ~2g acceleration. The device with series connected generators is capable of generating maximum 175 µW average power. Improved design and further optimization would be able to increase its power generation capability (as well as power density) to be used in wearable devices applications.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Portable and wearable smart devices and sensors (e.g., stock scanner, trackable wallet, hearing aid, lifestyle tracker band, smart training shoes, smartwatch, etc.) are becoming popular due to their multifunctional activities, miniaturize size and low power consumption features. All those devices and sensors require power sources to run. Generally, electrochemical batteries are the best choices. However, as compared to the development in device technologies, development in power sources is still slow. Beside the advantages (e.g., high energy density, smaller size, low cost) of the electrochemical batteries, they have some disadvantages including limited lifetime, inconvenient in recharging or sometimes, replacing (Anton and Sodano 2007). Therefore, among a number of energy sources (e.g., light, heat, radio waves, etc.) around our environment, energy harvesting from mechanical vibrations has drawn much attraction over the last few decades (Beeby et al. 2006; Mitcheson et al. 2008; Saadon and Sidek 2011; Harne and Wang 2013). Human-body-induced motion such as walking, running, shaking limbs, etc. generates mechanical vibrations which have become of interest for energy harvesting over the last few years (Saha et al. 2008; Ju et al. 2013; Xie and Cai 2014; Ylli et al. 2015). As compared to other mechanical vibration sources, harvesting power from human-body-induced motions are challenging due to their low-frequency (<10 Hz), high- amplitude (>1 g), and random (time-varying) characteristics (Ju et al. 2013; Ylli et al. 2015).
Most vibration energy harvesters are resonant types based on under-damped, single-degree-of-freedom (SDOF) spring-mass-damper systems. These resonant systems are not well suited for human-body-induced motions because they are optimized to generate maximum power within a narrow frequency range (in the vicinity of a specific resonant frequency) under sinusoidal oscillations. The applied excitation frequency must match its resonant frequency to achieve best results from the harvester. Unfortunately, it is difficult to design an efficient resonant harvester for human-body-induced motion due to the size constraints for specific application (Halim and Park 2015). Moreover, it has been observed that the amount of generated average power decreases dramatically as the operating frequency decreases (Williams and Yates 1996). Converting low-frequency vibration into high-frequency vibration, known as mechanical frequency up-conversion, is an effective way to overcome the challenges. It is mostly done by mechanical impact of the power generating element (either piezoelectric or electromagnetic transducers) by a driving element that couples the low frequency vibration with the harvester (Halim and Park 2014a; Zorlu et al. 2011; Gu and Livermore 2011). Other commonly used methods include mechanical plucking, non-mechanical interaction (e.g., magnetic actuation), etc. (Kulah and Najafi 2008; Galchev et al. 2011; Pozzi and Zhu 2011) In a mechanical frequency up-converted energy harvester, the power generating element (one or more) vibrates at its own resonant frequency (generally, at higher frequency) while excited by a low-frequency driving element; no matter how low the frequency is as well as whether the driving element is resonant or non-resonant. However, in a frequency up-converted energy harvester designed for human-body-induced motion, a non-resonant driving element is desirable.
A number of efforts have been taken by the researchers to harvest energy from human-body-induced motion using mechanical frequency up-conversion mechanism. Piezoelectric energy harvesters based on direct mechanical impulse force by a moving cylinder, magnetic plucking from the motion of upper arms, mechanical plucking technique (by a plectrum) in a plucked beam rotational knee joint energy harvester, etc. have already been demonstrated to harvest energy during walking or running motions (Wei et al. 2013; Pillatsch et al. 2014; Pozzi et al. 2012). As the vibrations generated by human walking or running motions have non-periodic nature, those harvesters cannot work efficiently to generate power from those non-periodic vibrations, which they are capable in periodic vibrations. Moreover, placing the energy harvester on different places of human body is quite uncomfortable as well as it requires additional user specific customized wearable band. Therefore, a number of human-limb driven energy harvesters have recently been presented which use direct mechanical impact on the transducer element by freely movable inertial mass (Renaud et al. 2009; Halim et al. 2014, 2015). Even though these harvesters are capable of working effectively on periodic human hand-shaking vibration, mechanical impacts on the power generating element causes its quick damage, especially in case of piezoelectric devices, raising the questions on reliability, as well as efficiency of the energy harvesters.
In this paper, the impact based frequency up-converted piezoelectric energy harvester for human-limb motion has been newly designed and demonstrated. Instead of direct mechanical impacts on the power generating elements, a spring-free low-frequency driving element impacts on the flexible side-walls on which the generators (piezoelectric beams) are clamped. While the harvester is hand-shaken in axial direction, the ball consecutively hits the flexible side-walls during its back and forth motion, transfers impulsive force to the piezo-beams and allows them to vibrate freely which in turn, generate voltage or power. Energy transfer (by such impact strategy) through flexible side-walls not only eliminates the quick damage of the piezo-materials but also reduces the power loss by minimizing the quick decay of the generated voltage or power. Moreover, spring-less and freely movable low-frequency driving element can be coupled efficiently with the periodic hand-shaking vibration at any frequencies (non-resonant behavior) with sufficiently large acceleration amplitude (Halim and Park 2014b). The proposed frequency up-conversion strategy offers reliable operation of the piezoelectric energy harvester in generating meaningful power from periodic human-body-induced motion to be used in powering wearable consumer electronics.
2 Harvester configuration and its working principle
Before designing a vibration energy harvester, the operating conditions (e.g., frequency and amplitude), intended application, the overall harvester dimension, mass, and volume, etc. must be taken into consideration. Since we have intended to operate the device for hand-shaking vibration, first, the characteristics of human-handy motion vibration need to be investigated. Our recent investigation shows that the characteristics of vibration generated by hand-shaking is nearly harmonic and falls within 2.5–6 Hz frequency range having 15–20 ms−2 peak acceleration amplitudes (Halim and Park 2014b). Considering such low-frequency and high-amplitude characteristics of hand-shaking vibration, proposed energy harvester has been designed.
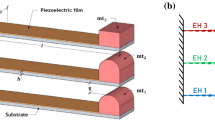
The schematic structure and operation principle of the proposed energy harvester has been shown in Fig. 1. It consists of a hollow cylindrical channel containing a freely movable metal ball. Two rectangular-shaped flexible side-walls are placed (double-clamped to the harvester structure) at both ends of the channel. Two mass-loaded unimorph type piezoelectric generating beams are clamped at right angles to the side-walls. It means that each side-wall acts as the base for each mass-loaded unimorph type piezoelectric generating beam. The ends of the hollow cylindrical channel are open so that the ball can hit the side-walls. Besides, a small distance is maintained between each channel-end and side-wall so that the side-wall can response to the mechanical impact (by the metal ball) without any obstacle. Each mass-loaded piezoelectric generating beam is clamped at a certain distance (over and below the hollow cylindrical channel) from the center (where mechanical impact occurs) of the sidewalls to avoid the contact of the loaded mass with the channel’s outer-wall, during its vibration. As shown in Fig. 1b, when the device is excited (by hand-shaking vibration), the freely movable metal ball vibrates through the channel (in axial direction), impacts on the side-walls consecutively, allows them to generate impulsive vibrational force. Immediately after each mechanical impact, the impulsive force is transferred to the loaded mass through the unimorph generating beam and allows it to vibrate according to the resonant frequency of the mass-loaded cantilever beam. As a result, strain produces on the surfaces of the piezoelectric materials which, in turn, generate voltage. In every vibration cycle of its back and forth motion, the ball impacts once on each sidewall. According to literature, an impulse excitation in an under-damped system (like the proposed system) allows the oscillatory motion to decay exponentially (Jung and Yun 2010). Therefore, the output responses from the piezoelectric beams decay exponentially between two consecutive impacts. However, use of the flexible base for the cantilever beam minimizes quick decay of the beam’s vibration, as well as amplitudes of the instantaneous output voltage.

a 3D schematic structure and b operation principle (with simplified side-view) of the proposed frequency up-converting piezoelectric energy harvester using flexible side-walls
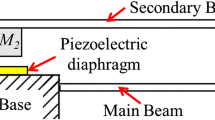
Since the proposed energy harvester has two similar power generating systems, each system can be represented by the model shown in Fig. 2. As shown in Fig. 2a, the system consists of a clamped–clamped (vertically) base structure which is called initial spring, driven by an external force F(t) generated by the impact of the freely movable ball and a mass-loaded unimorph generating beam (the secondary spring-mass system) clamped at right angles (horizontally) to the base structure that acts as an asymmetrically placed effective mass of the initial spring-mass system. The equivalent mechanical model of the overall system (which constitutes a two-degree-of-freedom system) is shown in Fig. 2b. Here, k b and c b are the stiffness and damping coefficient of the initial spring, respectively whereas k g and c g are the stiffness and damping coefficient of the secondary spring, respectively. y is the horizontal displacement of the effective mass, m eff of the base structure (initial spring-mass system) and z is the vertical displacement of the mass, m of the secondary spring-mass system.

a Schematic representation and b equivalent mechanical model of each power generating system of the proposed energy harvester
When the ball (moves along y-axis) impacts at the center of the base structure with a low-frequency (ω0) periodic force F(t), the initial spring transfers energy to the subsidiary secondary spring that allows the proof-mass, m p to vibrate along z-axis. Therefore, the governing equations of motion of the system can be represented by (Thomson 1998)
where ζ b and ζ s are the mechanical damping ratio of the base structure and the mass-loaded unimorph cantilever beam, respectively. η is the nondimensionalized mode coupling coefficient. μ is the nonlinearity coefficient. f (=F0 ⁄ m eff ) is the nondimensionalized external force. ω b and ω s are the natural frequencies of the base structure and the mass-loaded unimorph beam, respectively. Since the mass-loaded unimorph beam clamped to the base structure is an asymmetrically placed mass m eff , then the natural frequency of the clamped–clamped base structure will be affected by the displacement of the mass-loaded unimorph cantilever beam (along z-axis), and can be given by (Cartmell 1990)
where l = (l a + l b ) is the length of the clamped–clamped beam, l a and l b are two segments separated by m eff , E b and I b are the Young’s modulus and the area moment of inertia of the beam, respectively. However, the natural frequency, ω s of the power generating element, i.e., the mass-loaded unimorph cantilever beam will be affected by the natural frequency, ω b of the base structure. Since the base structure (initial spring) has made flexible, it is able to restore its initial state very fast. We assume that the natural frequency variation of the mass-loaded unimorph cantilever beam is minimal and can be ignored in most simplified cases.
The unimorph type generating beam is composed of a piezoelectric layer (poled along thickness direction) bonded to a substrate (non-piezoelectric) layer of same width, w and length, L. It is assumed that the bonding between the layers is perfect. A periodic external force F(t) applied at the clamped end (on the base structure) of the unimorph beam allows it to vibrate along z direction. Electric charges induce due to lateral stresses on the piezo-surfaces. Since both surfaces (top and bottom) of the piezoelectric layer are covered with electrode layers, the induced electric charges on the piezoelectric surfaces will be redistributed such that each surface has one single electrical potential. Therefore, the peak open circuit voltage induced by the unimorph type generating beam will be
where –d31 is the piezoelectric strain coefficient, ε r is the dielectric constant of piezoelectric layer, and ε0 is the permittivity of free space, \( {\tilde{k}_{s}} \)is the effective stiffness of the unimorph beam, Z max is the maximum displacement of the unimorph beam which can be determined by solving Eqs. (1) and (2) under appropriate boundary conditions, D is the bending modulus per unit width of the unimorph beam, E p is the Young’s modulus of the piezoelectric material, t p is the thickness of the piezo-layer, t n is the position of the neutral plane from the bonding plane, ζ T is the total (sum of mechanical and electrical) damping ratio. Basic mechanical vibration theory states, when under-damped structures are periodically excited by an initial condition such as displacement or velocity; their response will be an oscillatory motion with exponential decay (Jung and Yun 2010). Therefore, the instantaneous voltage generated by the proposed system has an exponentially decaying characteristic and can be expressed as
where n (=0, 1, 2) is the number of impact, ω d is the damped natural frequency which is defined as \( \omega_{d} = \omega_{s} \sqrt {1 - \zeta_{T}^{2} } \). Then the amount of power delivered to the matched load resistance, R l is
Based on the above discussion, we performed the simulation of the time domain output voltage generated by each unimorph piezoelectric beam of the proposed energy harvester using Eq. (5). Simulation parameters were calculated from the geometric and material parameters of the harvester components. We considered that the ball starts moving from the center of the channel and vibrates periodically in response to the applied human-limb motion. The gravity effect on the ball was neglected. Figure 3 shows the simulated open circuit voltage waveforms of each piezoelectric generator for a low-frequency (5 Hz with 2g peak acceleration) periodic vibration (similar to the hand-shaking vibration) of the ball. Maximum voltage (6.1 Vp-p) is generated right after the impact and then the amplitude of the instantaneous voltage (2 Vp-p) decreases with slow exponential decay which occurs due to the damping of the vibrating unimorph beam. The corresponding power output of each individual beam has been calculated using Eq. (6). Each piezoelectric beam delivers 1.28 mW peak power (right after the impact) to a matched load resistance; however, the average power is reduced to 121 μW due to the reduced amplitude of the instantaneous voltage generated by the piezo-beam.

Simulated voltage waveforms of both unimorph piezoelectric generating beams at 5 Hz operating frequency and 2g peak acceleration
3 Prototype fabrication
In order to illustrate the proof-of-concept of the proposed energy harvester, a macroscale prototype (40 × 32 × 18 mm3) was assembled within a polycarbonate housing structure and tested. The key components of the prototype include a metal ball (Ø10 mm) made of SUS-316, two rectangular shaped flexible side-walls made of silicone rubber, and two unimorph beams. The unimorph beam was made by bonding a PZT-5H4E piezoelectric layer (35 × 5 × 0.19 mm3) with an Aluminum (35 × 5 × 0.1 mm3) support layer by conductive epoxy. A small mass made of iron was glued to one end of the beam whereas the other end was glued to silicone rubber (14 × 8 × 1 mm3) that acts as the flexible base for the beam. The metal ball was kept in a hollow cylindrical channel of the polycarbonate housing and two flexible sidewalls (with which the cantilever beams were glued) were placed on both ends of the channel leaving 1 mm gap from the channel ends. Figure 4 shows the photographs of the prototype energy harvester. Table 1 presents the material parameters and geometric properties of the proposed energy harvester.

Photographs of the a harvester components before assembling and b fabricated harvester prototype
4 Experimental results and discussion
To date, most of the vibration energy harvesters (including human-body-induced motion based energy harvesters) have been characterized using electrodynamic shaker. In this case, our fabricated harvester prototype was tested by hand-shaking vibration. A convenient (small and portable) measurement system was used to measure and record the acceleration and frequency of hand-shaking vibration during the experiment. For that, an EVAL-ADXL326Z (Analog Devices Inc., USA) tri-axial MEMS accelerometer kit was used. It was mounted on the back side of the user’s hand and its outputs were connected to an XR5-SE (Pace Scientific Inc., USA) data logger to record the data. On the other hand, the harvester outputs were connected to a digital storage oscilloscope (TDS 5052B) in order to observe and record the output response instantly. A schematic diagram of the hand-shaking test setup is shown in Fig. 5. A continually variable load resistance was connected to the output terminals during load voltage measurements (to determine the power delivered).

Schematic of the hand-shaking vibration test setup for the fabricated prototype energy harvester
We started with the measurement of open circuit voltage of individual piezoelectric generating beam as well as that of the beams connected in series at different frequencies of hand-shaking vibration. Figure 6 shows the change of generated open circuit voltages at different hand-shaking vibration frequencies while the acceleration amplitudes (peak values) of the applied vibration were kept constant (~2g). Results show that the values of maximum peak–peak open circuit voltage were almost constant for both individual beam and series connected beams. Figure 7 shows the measured open circuit voltage waveforms generated by individual piezoelectric generating beam while the energy harvester prototype was hand-shaken at 4.96 Hz and ~2g peak acceleration. As seen from the figure, each piezoelectric generator generates 5.05 V peak–peak voltage right after the impact and 1.76 V maximum peak–peak voltage (with slow amplitude-decay of the signal) during the generator’s free vibration. The slow amplitude-decay is recovered (before the amplitude drops significantly) periodically while consecutive impacts occur. Figure 8 shows the open circuit voltage waveform of the piezoelectric generating beams while connected in series. As seen from the figure, two consecutive highest peaks were obtained by two consecutive impacts of the ball on two flexible side-walls during one cycle of the ball movement.

Generated peak–peak open circuit voltage as a function of hand-shaking vibration frequency

Measured open circuit voltage waveforms generated by two individual generators while the prototype was hand-shaken at 4.96 Hz and ~2g peak acceleration

Measured open circuit voltage waveform generated by two generators connected in series while the prototype was hand-shaken at 4.96 Hz and ~2g peak acceleration
The frequencies of the generated output voltages and the applied vibration were determined by fast Fourier transform (FFT) analysis of the generated voltage and acceleration waveforms, respectively which are shown in Fig. 9. FFT analysis shows that the frequencies of the generated voltage waveforms are nearly 60 Hz and that of the applied vibration is 4.96 Hz. This clearly indicates the frequency up-conversion behavior of the proposed energy harvester. There is a slight variation in the frequencies among the frequency components of the top beam, bottom beam and series connected beams due to the phase differences.

Frequency components (by FFT) of a the measured output voltage waveforms and b the measured acceleration waveform of applied vibration
Each piezoelectric generator delivers maximum 96 µW average power to 7 kΩ optimum load resistance while two piezoelectric generators connected in series delivers maximum 175 µW average power to 15 kΩ load resistance at the same operating condition (4.96 Hz hand-shaking vibration frequency and ~2g peak acceleration), as shown in Fig. 10. The outputs of the harvester were connected to a variable resistor and the resistance values were swept from 1 to 40 kΩ. The voltage across the load increases as the value of load resistance increases. The values of average power are experimentally equal to V 2 L /R l , where V L is the measured rms voltage across the load resistance, R l . It is to be noted that, the voltage and power obtained from the series connected generators are somewhat lower than the sum of the voltage and power of the individual generator due to the slow amplitude-decay of the generated voltage waveforms as well as the phase difference between the outputs of individual generator.

Voltages and powers versus load measured from a single beam and two series connected beams at 4.96 Hz hand-shaking frequency and ~2g peak acceleration
Figure 11 shows the instantaneous power waveform obtained from two series connected piezoelectric generators while it was connected to the corresponding optimum load resistance (15 kΩ). Consecutive maximum peaks have been obtained from the top and bottom generating beams when ball impacts on the corresponding sidewalls, consecutively. Maximum 0.89 mW peak power is delivered right after the impact and the rest part generates the maximum peak power of 252 µW with exponential decay. As a result, the overall average power is reduced to 175 µW. It is to be mentioned that even though the peak–peak voltage is almost constant with the change of hand-shaking vibration frequency (while the acceleration amplitude was kept constant) for both the individual generating beam and the series connected beams (shown in Fig. 1), the rms voltage changes with the change of frequency which results in the change of average power values, as shown in Fig. 12. Note that, experimentally obtained voltage and power (from each beam) are a bit poor while comparing with the simulation results. These variations occur due to the process variation in the beam fabrication, imperfect assembling of the device components, and a slight change in the input vibration parameters during the experiment.

Instantaneous power waveform obtained from two series connected generators while the harvester prototype was hand-shaken at 4.96 Hz and ~2g peak acceleration

Change of rms voltage and average power generated by series connected generators with hand-shaking vibration frequency
5 Conclusions
This paper presents a newly proposed piezoelectric energy harvester using flexible side-walls which has been experimentally demonstrated by human hand-shaking vibration. A mechanical impact based frequency up-conversion strategy has been implemented by a freely movable metal ball to couple the hand-shaking vibration in order to overcome the limitations of low frequency harvester design. While excited by hand-shaking vibration with sufficiently large acceleration amplitude, the ball impacts on two flexible side-walls (bases for two mass-loaded unimorph piezoelectric generating beams), instead of direct impact on the power generating elements (piezo beams), placed at the ends of a channel through which the ball vibrates. This indirect impact method allows saving the device from quick damage. A prototype energy harvester generates maximum 175 µW average power, delivered to 15 kΩ optimum load resistance. Analysis of the experimental data shows the frequency was up-converted to 60 Hz from 4.96 Hz hand-shaking vibration frequency. For a functional volume of 23 cm3, its power density (7.6 µW cm−3) is considerably low. However, further optimization of the device parameters (spring stiffness, damping etc.) as well as more portable and lighter packaging will improve the output performances within a reduced volume.
References
Anton SR, Sodano HA (2007) A review of power harvesting using piezoelectric materials (2003–2006). Smart Mater Struct 16:R1–R21
Beeby SP, Tudor MJ, White NM (2006) Energy harvesting vibration sources for microsystems applications. Meas Sci Technol 17:R175–R195
Cartmell M (1990) Introduction to linear, parametric and nonlinear vibrations. Chapman and Hall, London
Galchev T, Kim H, Najafi K (2011) Micro power generator for harvesting low-frequency and nonperiodic vibrations. J Microelectromech Syst 20:852–866
Gu L, Livermore C (2011) Impact-driven, frequency up-converting coupled vibration energy harvesting device for low frequency operation. Smart Mater Struct 20:045004
Halim MA, Park JY (2014a) Theoretical modeling and analysis of mechanical impact driven and frequency up-converted piezoelectric energy harvester for low-frequency and wide-bandwidth operation. Sens Actuators A 208:56–65
Halim MA, Park JY (2014b) A non-resonant, frequency up-converted electromagnetic energy harvester from human-body-induced vibration for hand-held smart system applications. J Appl Phys 115:094901
Halim MA, Park JY (2015) Modeling and experiment of a handy motion driven, frequency up-converting electromagnetic energy harvester using transverse impact by spherical ball. Sens Actuators A 229:50–58
Halim MA, Cho HO, Park JY (2014) A handy-motion driven, frequency up-converted hybrid vibration energy harvester using PZT bimorph and non-magnetic ball. J Phys Conf Ser 557:012042
Halim MA, Cho H, Park JY (2015) Design and experiment of a human-limb driven, frequency up-converted electromagnetic energy harvester. Energy Convers Manag 106:393–404
Harne RL, Wang KW (2013) A review of the recent research on vibration energy harvesting via bi-stable systems. Smart Mater Struct 22:023001
Ju S, Chae SH, Choi Y, Lee S, Lee HW, Ji C-H (2013) A low frequency vibration energy harvester using magnetoelectric laminate composite. Smart Mater Struct 22:115037
Jung S-M, Yun K-S (2010) Energy-harvesting device with mechanical frequency up-conversion mechanism for increased power efficiency and wideband operation. Appl Phys Lett 96:111906
Kulah H, Najafi K (2008) Energy scavenging from low frequency vibrations by using frequency up-conversion for wireless sensor applications. IEEE Sens J 8:261–268
Mitcheson PD, Yeatman EM, Rao GK, Holmes AS, Green TC (2008) Energy harvesting from human and machine motion for wireless electronic devices. Proc IEEE 96:1457–1486
Pillatsch P, Yeatman EM, Holmes AS (2014) A piezoelectric frequency up-converting energy harvester with rotating proof mass for human body applications. Sens Actuators A 206:178–185
Pozzi M, Zhu M (2011) Plucked piezoelectric bimorphs for knee-joint energy harvesting: modeling and experimental validation. Smart Mater Struct 20:055007
Pozzi M, Aung MSH, Zhu M, Jones RK, Goulermas JY (2012) The pizzicato knee-joint energy harvester: characterization with biomechanical data and the effect of backpack load. Smart Mater Struct 21:075023
Renaud M, Fiorini P, Schaijk R, Hoof C (2009) Harvesting energy from the motion of human limbs: the design and analysis of an impact based piezoelectric generator. Smart Mater Struct 18:035001
Saadon S, Sidek O (2011) A review of vibration based MEMS piezoelectric energy harvesters. Energy Convers Manag 52:500–504
Saha CR, O’Donnell T, Wang N, McCloskey P (2008) Electro-magnetic generator for harvesting energy from human motion. Sens Actuators A 147:248–253
Thomson W (1998) Theory of vibration with applications. Prentice-Hall, New Jersey
Wei S, Hu H, He S (2013) Modeling and experimental investigation of an impact-driven piezoelectric energy harvester from human motion. Smart Mater Struct 22:105020
Williams CB, Yates RB (1996) Analysis of a micro-electric generator for microsystems. Sens Actuators A 52:8–11
Xie L, Cai M (2014) Increased piezoelectric energy harvesting from human footstep motion by using an amplification mechanism. Appl Phys Lett 105:143901
Ylli K, Hoffmann D, Willmann A, Becker P, Folkmer B, Manoli Y (2015) Energy harvesting from human motion: exploiting swing and shock excitations. Smart Mater Struct 24:025029
Zorlu O, Topal ET, Kulah H (2011) A vibration-based electromagnetic energy harvester using mechanical frequency up-conversion method. IEEE Sens J 11:481–488
Acknowledgements
The authors are grateful for receiving a research grant from Kwangwoon University in 2015 and from the Basic Science Research Program (2013R1A1A2A10064810) and the Pioneer Research Centre Program (2010-0019313) through the National Research Foundation of Korea (NRF), funded by the Ministry of Science, ICT and Future Planning of Korea.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Halim, M.A., Park, J.Y. Piezoelectric energy harvester using impact-driven flexible side-walls for human-limb motion. Microsyst Technol 24, 2099–2107 (2018). https://doi.org/10.1007/s00542-016-3268-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-016-3268-6