
Abstract
This paper presents the design and fabrication of the thermally actuated MEMS switches based on out-of-plane V-beams. The purpose of this research is to analyze the mechanical response of a V-thermal actuator fabricated from aluminum in order to improve the accuracy in response and to increase the switch lifetime. The actuation of this kind of switches is based on the thermal displacement of the mobile electrode under thermal load that is generated when the actuation voltage is applied. It can be used either as a capacitive switch or as a metal-to-metal one. The displacement of the mobile electrode for a given temperature is analytically calculated and validated both numerically and experimentally. Experimental investigations are performed on a macro-scale sample using a 3D digital image correlation measuring system, a heating source and a thermal camera for temperature monitoring. The first fabrication steps of the MEMS switch based on the V-beam thermal actuator are presented. The out-of-plane V-beams thermal MEMS switches can be monolithically integrated in RF applications.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
A micro actuator is the key device for micro systems to perform physical functions. In case of a MEMS switch structure supported by micro-beams a static displacement of the mobile electrode is used to close a RF circuit. The actuating force can be an electrostatic force, electromagnetic force, thermal force or the displacement can be given by piezoelectric actuation (Li et al. 2010; Pal et al. 2015). Each driving mechanism has its own advantages and disadvantages but only thermal actuation is considered in this paper due to the high displacements generated for low actuation voltages (Rawashdeh et al. 2012). The reliability of thermal actuators depends on the packaging as well as on the design and materials used for the fabrication of the micro-structure. Thermal micro-actuators have been operated successfully for tens of millions of cycles (Phinney et al. 2012); degradation has been observed including plastic deformation of the actuator’s legs, wear debris generation, changes in the grain structure, oxide growth and even fracture (Baker et al. 2004; Phinney et al. 2010, 2012; Plass et al. 2004).
The central shaft of the structure can be used either as a capacitive switch or as a metal-to-metal one. Since the RF characteristics are determined by the mechanical position of the movable electrode, distortion of signal can be quite low. The movable electrode is connected to the ground (fixed electrode) in the analyzed case by the thermal expansion of V-shape beams (chevron actuator). Monolithic integration with electrical circuit is considered for fabrication process of switches that provide size reduction.
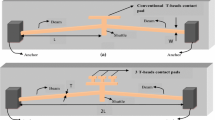
Figure 1 shows the schematic view and the cross-sections of a MEMS switch based on the V-beam actuator. The coplanar waveguide (CPW) is under and along the mobile electrode (Fig. 1a). The cross-section of the switch in the off-state position is shown in Fig. 1b. When a thermal load is applied to the structure the mobile electrode moves towards the fixed electrode and the switch is in the on-state position (Fig. 1c). One of the main failure causes of this kind of switch is the stiction between mobile electrode and the substrate. The number of V-beams pairs influence the rigidity and the return force of the mobile electrode. An analytical model is proposed in order to assess the influence of each geometrical parameter on the output deflection. The model was tested on a macro-scale geometrical type of the V-beam thermal actuator due to the low cost, speed and ease of fabrication related to the micro-scale.

Schematic representation of a MEMS switch based on the V-beam actuator: a top-view; b cross-section of the off-state; c cross-section of the on-state
In this paper we present the design and modeling of a macro-scale out-of-plane V-beam thermal actuator and the first fabrication steps of a micro-scale application for this structure in MEMS switches. The scope of our research work is to design and test the mechanical response of the V-beam actuators with respect to the applied thermal load in order to improve their accuracy and to increase their lifetime. In the first part of the paper, the analytical solution, numerical investigation and experimental validation of the output displacement of a V-beam thermal actuator for a given temperature increase is presented. The out-of-plane displacement of the central shaft of the V-Beam actuator is experimentally determined on the macro-scale structure using 3D Digital Image Correlation (3D-DIC). The first fabrication steps of the MEMS device that incorporates a V-beams thermal actuator are presented in the second part of paper, together with the conclusions.
2 Out-of-plane V-beam thermal actuator
2.1 Design considerations
The V-beam thermal actuator type structure has been successfully integrated in the design of optical switches (Lee and Wu 2005; Yang et al. 2007), the design of optical fiber alignment devices (Sassen et al. 2008), the design on micro-grippers (Shivhare et al. 2015) and even in the design of military safety-and-arming devices (Li et al. 2015). The feasibility of implementing vertical thermal actuators based on the chevron topology has been confirmed in (Varona et al. 2009). These and other reported applications that include V-beam geometrical type structures in their design are based on the advantage of thermal actuation in developing a high force output in combination with relatively high deformations. The novel approach of this paper is to propose the development of a micro-switch based on the out-of-plane displacement of a V-beam thermal actuator. The central shaft of the actuator moves under thermal load towards the cathode, thus closing the circuit. Thermal actuation was chosen in order to assure good mechanical contact between the two surfaces as well as to prevent stiction when the breaking of the circuit is desired. The development and validation of an analytical model is required in order to derive the geometrical parameters that can lead to the closing of the gap while taking into account a temperature increase that is compatible with the rest of the integrated circuit components.
2.2 Geometrical parameters of the actuator
A schematic representation of an out-of-plane V-beam geometrical type structure is presented in Fig. 2, in which the symbolic parameters have the following meaning: l—beam length; t—structure thickness; w—beam width; β—beam inclination angle (the angle of the neutral axis of the beam in respect to the plane containing the anchors of the actuator).

Geometrical parameters of the out-of-plane V-beam thermal actuator
2.3 Analytical study on the deflection of the structure under a given thermal load
An analytical study was performed in order to determine the deflection of the structure under a given change in temperature. The proposed beam model is shown in Fig. 3. Beside the boundary conditions given by the rigid anchor and central shaft, the model also considers an imposed displacement along the x-axis “e” which takes into account the expansion of the central shaft along the x-axis, out of which the expansion of the substrate of the sensor is subtracted.

Half model of the V-beam actuator with thermal load and imposed displacement along the x-axis
Considering the Castigliano’s second theorem, Eq. (1) allows the calculation of the out-of-plane displacement “δ” of the central shaft for a given temperature increase—ΔT.
The terms that weren’t previously defined are: α—coefficient of thermal expansion of the structure’s material; A—cross-sectional area of the beam; I z —moment of inertia of the cross section of the beam; e—imposed displacement of the anchors. More information about how this relationship was determined can be found in (Chiorean et al. 2014). Also in the reference there are presented the influences of the geometric parameters upon the displacement and performance of a V-beam actuator.
A macro-scale structure of the out-of-plane geometrical type V-beam actuator was fabricated in order to test the proposed analytical model. The actuator has the following dimensions: l = 26.4 mm, w = 1 mm, β = 10°, and it is made of aluminum (α = 2.3e–5 (1/°C), Young’s modulus = 71,000 MPa). The central shaft and the anchors have a width of 6 mm. The sample, shown in Fig. 4, was laser cut from an aluminium sheet having a thickness (t) of 1 mm. The structure was spray-painted giving it a stochastic “salt-and-pepper” pattern (required by experimental investigations) and then embossed to the final shape.

The fabricated macro-scale out-of-plane V-beam structure
2.4 Numerical modeling of the displacement output of the macro-scale structure
Finite Element Analysis (FEA) has been performed in order to simulate the thermal actuator’s displacement output for a given temperature increase. The numerical study was performed using ANSYS Workbench. Figure 5 shows the vertical deformation of the structure defined by the geometrical parameters presented above when a 70 °C temperature increase is applied. Numerical determinations like this were performed for all the temperature differences considered during the experimental investigations.

Axial deformation output determined using ANSYS Workbench
2.5 Experimental validation of the analytical and numerical models of the macro-scale structure
Experimental validation of the analytical model has been performed on the macro-scale model of a V-beam thermal actuator. Measurement of the out-of-plane displacements relies on full-field, optical method of digital image correlation.
In the 3D digital image correlation technique, random grey value dot patterns on specimen surfaces are observed by two cameras from different directions in a stereoscopic setup, the position of each object point being focused on a specific pixel in the camera plane. The digitized images are compared to match subsets (facets) from one image to another by using an image correlation algorithm. Knowing the imaging parameters for each camera and the orientations of the cameras with respect to each other, the position of each object point in three dimensions can be calculated. If this calculation is done for every point of the object surface, the 3D surface contour of the object can be determined for all the areas that are observed by both cameras. In order to evaluate surface displacements and strains on the object surface, a series of measurements are taken while the specimen surface is moved due to a loading. An application of 3D-DIC to the determination of thermal behaviour of materials is presented in (Dudescu et al. 2013).
A schematic representation of the experimental set-up developed in order to determine the upward movement of the central shaft of a V-beam geometrical type thermal actuator is presented in Fig. 6.

Experimental set-up for the determination of the displacement of the macro-scale V-beam actuator
The experimental tests on the sample were performed at Technical University of Cluj-Napoca using the Q400 3D Digital Image Correlation system produced by Dantec Dynamics GmbH, Germany. The optical measurement allows the determination of the displacement of the central shaft as it is pushed away from the plane defined by the anchors of the structure. The aluminum sample was mounted on a ceramic substrate and images were taken using the DIC system at certain temperature thresholds—at every 10 °C temperature drop in the 92–42 °C interval and 22 °C laboratory conditions. The temperature of the sample was monitored using a thermal imaging camera. The noncontact displacement and temperature measurement solutions were preferred in order to avoid any contact that may alter the free expansion of the structure under thermal load.
2.6 Validation of the dependency of the deflection on the temperature increase
The experimental, numerical and analytical results are presented in Fig. 7.

Comparative experimental, numerical and analytical results
The analytical results are in good agreement with the FE calculations and the experimental determination which proves the reliability of the proposed mathematical model. The relative errors between the analytical and the experimental results are less than 7 %, while the relative errors between the numerical and the experimental results are less than 9 %. These results can be used in the future design of V-beam sensors as they can facilitate the making of an informed decision when it comes to determining the geometry that would lead to a desired response. The influence of each geometrical parameter can be determined based on the analytical relationship by considering a set of initial parameters and then varying them one at a time. This validated analytical model can also be used at micro-scale if the mechanical characteristics of the material are experimentally determined because these are different from bulk/laminated to deposited aluminium. Other specific aspects at the microscale such as influence of the temperature upon the Young’s modulus should be taken into account (Pustan et al. 2013).
2.7 Electro-thermal modelling of the V-beam actuator
The analytical model presented so far offers a relationship that allows the determination of the output deflection as a function of the structure’s geometric parameters and a given temperature increase. This would suffice if the structure was to be used as a sensor. As far as the actuation of the switch is concerned, thermal heating through Joule effect is envisioned, so an analytical model that allows the determination of a mean temperature value for a given actuation current is also proposed.
When current is applied to a resistor, its temperature rises until an equilibrium is reached between the electrical power (P) and the heat flux it dissipates through convection (dQ/dt):
in which the terms are: R—resistance of the sample, I—current intensity, h c —convective heat transfer coefficient, A c —surface area of the heat being transferred, ΔT—temperature difference.
The resistance of the structure varies with its temperature as presented in (Serway and Jewett 2012):
in which the terms that weren’t previously defined are: R a —ambient temperature resistance, k—temperature coefficient (k = 3.9∙10−3 [1/ °C] for aluminum).
The resistance at room temperature of the macro-scale structure presented in Sect. 2.3 can be computed by taking into account the resistivity of aluminum—ρ Al = 2.82∙10−8 Ω m (Serway and Jewett 2012):
The temperature increase for a 40 A actuation current can now be determined based on Eqs. (2), (3) and (4):
The dependency deflection versus driving current is resulting from the Eqs. (1) and (5) and can be stated that is not a linear but a square function.
Therefore, the average temperature of the sample at equilibrium is 62.1 °C, based on a 22 °C environmental temperature (same as the value set in the FE analysis). This model assumes a uniform spread of the temperature in the sample. Nonetheless, the resulted analytical average value is in good agreement with the temperature distribution obtained by FE analysis, shown in Fig. 8.

Temperature distribution
Figure 9 confirms that the voltage applied to the anchors of the structure generates a 13.3 A current through each beam (corresponding to a 40 A total actuation current given that the cross section of one beam is 1 mm2).

Current density distribution
A coupled field thermal-electric and static structural analysis was performed using ANSYS Workbench in order to determine if application of the thermal load as a field of temperatures over the structure gives significantly different results as opposed to the constant temperature used for the determinations used in Sect. 2.4, where a 40 °C temperature increase gave a 0.164 mm deflection. The couple field analysis deflection is depicted in Fig. 10.

Axial deformation resulted from coupled field thermal-electric and static structural analysis
This final result shows that working with the field of temperature distribution, for this configuration of the actuator, leads to a minor change in the output deflection of the structure (0.160 mm) as opposed to the uniformly distributed average value temperature that is covered by analytical calculus methodology.
Based on analytical model that states the relationship between the current, temperature and displacement is possible to estimate the same dependence for a microscale sample (presented in the next section). For a V-beam micro-scale aluminium actuator defined by the following geometrical dimensions: beam length l = 100 μm, beam width w = 3 μm, inclination angle β = 3°, number of beam pairs n = 4, width of the central shaft w cs = 20 μm, anchor console width w ac = 20 μm and a thickness t = 1 μm, the current needed to maintain the structure at 62 °C in free air convection is around 3.2…3.4 mA. The generated displacement for the corresponding temperature increase (40 °C) would be around 2.2 μm. Actuating the structure with a small and constant current leads to a long time needed to reach the thermal equilibrium. A higher actuation current could be applied for short time bursts and only then maintained at a lower constant value if the precise positioning of the central shaft is envisioned.
3 Fabrication of the micro-scale structures
The first fabrication steps for the device presented in this paper are described in this section. The structure was designed for fabrication in standard IC technology. The V-beam thermal actuator has been manufactured from aluminum, due to its mechanical and electrical properties. A 1 µm thick layer has been deposited by Electron Beam Evaporation. The structure was transferred using a one mask photolithographic patterning process and wet etching the aluminum layer. The final technological step consisted in the release of the movable part. This was achieved using isotropic etching of the silicon substrate on a RIE system (Sentech Instruments GmbH, Germany): the pressure was set at 30 Pa, the RF power at 200 W, while the gas flow (SF6) was 100 sccm. The resulted etch rate was about 800 nm/min. The test fabrication process described is schematically illustrated in Fig. 11.

Technological sequences of the micro-scale V-beam actuator fabrication process
After SEM investigation (see Fig. 12), we have observed that the lateral etch rate was smaller than the vertical etch rate. Depending on the shaft dimensions, the gap that we obtained varies from 9 to 22.5 µm. As compared to the macro-scale V-beam actuator described in this paper, the resulted micro-scale structure doesn’t have the pre-bending angle of the hinges. The study of the influence of each geometrical parameter based on the validated analytical relationship led to the conclusion that a smaller pre-bending angle produces higher displacement outputs. Thus, fabricating a structure with no pre-bending angle would be advantageous if the direction in which the displacement is generated can be controlled. We are trying to overcome this shortcoming by determining the proper gap of the final switch assembly, fabricating the device with the cathode electrode and imposing the direction of movement using the electrostatic actuation principle to initiate the movement of the central shaft towards the cathode.

SEM image of the micro-structure’s test fabrication
If this succeeds, the structure discussed in this paper can be easily integrated with other devices due to the relatively simple fabrication process and the compatibility with the general semiconductor processes.
4 Conclusions
MEMS mechanical response of the V-beam thermal actuator in many specific applications (optical MEMS, RF switches etc.) relies on the combination between beams (hinges) geometry, material constants and change in temperature. From this point of view the paper presents a research methodology including an analytical parameterized model validated by numerical and experimental methods. Starting from the mathematical model, a reliable design in terms of mechanical behavior of the MEMS switch based on the out-of-plane thermal V-beam actuator can be done if the material constants of the micro-fabricated structures’ layers are experimentally determined by nano-indentation.
Firstly, by considering the Castigliano’s second theorem, a parametrical expression to compute the out-of-plane deflection of the mobile part under thermal load is presented. Finite element analysis is performed taking into account an identical model, boundary conditions and thermal loads. Secondly, the behavior of a macro-scale structure of the V-beam actuator under thermal load is investigated using the 3D digital image correlation technique. The analytical, numerical and experimental results are in good agreement, thus validating the developed theoretical deflection-to-temperature dependency formula, as presented in Fig. 7.
Numerical simulations also validate the proposed methodology for determining the average temperature of the structure for a given actuation current. All these combined make possible future optimizations related to the influence of different geometrical parameters (lengths, cross sectional area of the beams, etc.) on the out-of-plane displacement. Thermal actuator’s reliability and lifetime depend on the mechanical failure mechanism of flexible elements such as stress levels, fatigue due to cycling, creep and plastic deformations. Stress concentration by hinges shapes, loading levels and cyclic operation must be carefully taken into account.
Future work will be dedicated to numerical and experimental investigation of the MEMS V-Beam Thermal actuator in order to prove its reliability in MEMS switches as well as to the development of the technological steps that lead to a fully functional and integrated circuitry compatible micro-switch.
References
Baker MS, Walraven JA, Headley TJ, Plass RA (2004) Final report: compliant thermo-mechanical MEMS actuators, LDRD# 52553. Department of Energy, United States
Chiorean R, Dudescu C, Pustan M, Hărdău M (2014) Deflection determination of V-beam thermal sensors using digital image correlation. In: Key engineering materials, 2014. Trans Tech Publ, pp 41–44
Dudescu C, Botean A, Hardau M (2013) Thermal expansion coefficient determination of polymeric materials using digital image correlation. Mater Plast 50:55–59
Lee C, Wu C-Y (2005) Study of electrothermal V-beam actuators and latched mechanism for optical switch. J Micromech Microeng 15:11. doi:10.1088/0960-1317/15/1/003
Li X et al. (2010) Electro-thermally actuated RF MEMS switch for wireless communication. In: Nano/micro engineered and molecular systems (NEMS), 2010. 5th IEEE international conference on, 2010. IEEE, pp 497–500
Li X, Zhao Y, Hu T, Xu W, Zhao Y, Bai Y, Ren W (2015) Design of a large displacement thermal actuator with a cascaded V-beam amplification for MEMS safety-and-arming devices Microsyst Technol 1–8 doi: 10.1007/s00542-015-2447-1
Pal J, Zhu Y, Lu J, Dao D, Khan F (2015) RF MEMS switches for smart antennas. Microsyst Technol 21:487–495. doi:10.1007/s00542-014-2111-1
Phinney LM, Spletzer MA, Baker MS, Serrano JR (2010) Effects of mechanical stress on thermal microactuator performance. J Micromech Microeng 20:095011
Phinney LM, Serrano JR, Baker MS (2012) Thermal microactuators. INTECH Open Access Publisher
Plass RA, Baker MS, Walraven JA (2004) Electrothermal actuator reliability studies. In: Micromachining and Microfabrication, 2004. International Society for Optics and Photonics, pp 15–21
Pustan M, Birleanu C, Dudescu C, Belcin O (2013) Temperature effect on tribological and mechanical properties of MEMS, In: Thermal, mechanical and multi-physics simulation and experiments in microelectronics and microsystems (EuroSimE), 14th International Conference on, 2013. IEEE, pp.1-6
Rawashdeh E, Karam A, Foulds IG (2012) Characterization of kink actuators as compared to traditional chevron shaped bent-beam electrothermal actuators. Micromachines 3:542–549
Sassen W, Henneken V, Tichem M, Sarro P (2008) An improved in-plane thermal folded V-beam actuator for optical fibre alignment. J Micromech Microeng 18:075033
Serway R, Jewett J (2012) Principles of physics: a calculus-based text. vol 2. Cengage learning
Shivhare P, Uma G, Umapathy M (2015) Design enhancement of a chevron electrothermally actuated microgripper for improved gripping performance Microsyst Technol 1–9 doi:10.1007/s00542-015-2561-0
Varona J, Tecpoyotl-Torres M, Hamoui AA (2009) Design of MEMS vertical–horizontal chevron thermal actuators. Sens Actuators A 153:127–130
Yang Y-J, Liao B-T, Kuo W-C (2007) A novel 2 × 2 MEMS optical switch using the split cross-bar design. J Micromech Microeng 17:875
Acknowledgments
This work was supported by the Reliability design of RF-MEMS switches for space applications (REDEMS) research project founded by the Romanian Space Agency’s STAR Program.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Pustan, M., Chiorean, R., Birleanu, C. et al. Reliability design of thermally actuated MEMS switches based on V-shape beams. Microsyst Technol 23, 3863–3871 (2017). https://doi.org/10.1007/s00542-015-2789-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-015-2789-8