
Abstract
In this paper, a new fault-tolerant control strategy is suggested to control the induction motors (IMs). The mathematical model of IMs is supposed to be unknown and also the main disturbances such as perturbation in the rotor resistance, and suddenly changes in the load torque are considered. A general type-2 fuzzy system using a new non-singleton fuzzification is proposed to cope with the uncertainties. The robustness and the stability of the proposed control scheme is studied on basis of the Lyapunov theorem. The simulation results show that the suggested control method has good performance in the versus of unknown dynamics of IM, time-varying disturbances, abrupt faults and measurement errors. The proposed scheme is compared with other popular control systems and other kind of fuzzy systems and singleton fizzification.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The induction motor (IMs) is commonly employed in industries because of its reliability, less cost and maintenance free (Deng et al. 2019; Lopes et al. 2017). The dynamics of the induction motors is complicated and is disturbed by variation in rotor resistance and changes in load torque and so on Guedes et al. (2019). Then the control problem of the induction motors has attained great attention in recent years. Various control methods have been applied to the control of IMs. The proposed methods are classified in three categories. In the first category, some simple and ordinary control schemes have been designed for IMs. For instance, the field-oriented control approach is designed for the speed control of IMs (Kubota and Matsuse 1994). In Yu et al. (2001), the vector controller is developed for IMs. The other simple controller which is frequently applied on IMs is PID control method (Lim et al. 2013). Many optimization methods and algorithms have been applied to optimize the PID control for IMs such as genetic algorithm, particle swarm optimization, fuzzy systems, imperialist competitive algorithm and so on (Thangaraj et al. 2011; Ustun and Demirtas 2008; Uddin et al. 2002; Ali 2015).
The next main approach for the control of IMs is the classical control methods. For instance, the predictive control is developed for IMs (Zhang and Yang 2015; Zhang et al. 2016). In Lascu et al. (2016), the feedback linearzation method designed for IMs and its performance is compared with the sliding mode approach. The backstepping control technique is studied for IMs in Regaya et al. (2018), and its robustness against variation of rotor resistance is investigated. The immersion and invariance control strategy is studied for IMs in Sabzalian et al. (2019b), and its robustness is investigated. The other most common controller that is frequently used to control of IMs is the sliding model control (SMC) approach. Various version of sliding mode control technique has been studied for IMs such as traditional SMC, adaptive exponential SMC, second-order SMC, terminal SMC, integral SMC, and so on (Xu et al. 2019; Ponce et al. 2018).
The main drawback of the reviewed studies is that the dynamic model of IM is considered to be certain and known. To cope with uncertainties of the mathematical model of IM, some intelligent control methods have been proposed (Kalat 2019). In third category, some control approaches have been presented based on the fuzzy systems, neural networks and evolutionary optimization algorithm. For example, in Guazzelli et al. (2018), a predictive controller is designed by genetic algorithm, in which a cost function is minimized to obtain the weighting factors of the conventional predictive controller. The super-twisting technique is employed to improve the field oriented control method (Kali et al. 2018). A simple neuro-fuzzy control method is suggested for IMs, and it is proved that the designed controller has desirable performance in contrast to the conventional PI controller (Gopal and Shivakumar 2019). In Xu et al. (2019), the conventional backstepping strategy is combined with the type-1 fuzzy system to cope with uncertainties. The predictive controller is combined with the Takagi–Sugeno fuzzy system, and it is shown that the performance of the model predictive control is improved (Ammar et al. 2019). The adaptive controller on basis of fuzzy systems, the command filtering and backstepping technique is studied for IMs (Zhao et al. 2018). In Farah et al. (2019), a simple self-evolving fuzzy controller is proposed to improve the performance of indirect field-oriented control scheme. The dynamics of IM is approximated with the fuzzy system in kind of type-1, and then, the feedback controller is designed and its stability is investigated using \(L_2\) optimization (Zina et al. 2018).
In the most of the aforementioned papers, type-1 fuzzy systems and simple neural networks are used to cope with the uncertainties of the dynamics of IMs. Also the robustness of the controller with respect to main faults such as perturbation in the rotor resistance and sudden changes in load torque need more researches. In recent years, it is demonstrated that interval and general type-2 fuzzy systems result in more desirable and more effective performance in approximation of uncertainties (Mohammadzadeh et al. 2019a; Melin et al. 2019; Ontiveros-Robles and Melin 2020; Jana et al. 2019; Zhao et al. 2019). Most recently, the generalized type-2 fuzzy system (GT2FSs) is successfully applied in various applications (Castillo and Atanassov 2019; Castillo et al. 2019). For instance, in Zarandi et al. (2019), GT2FSs are employed for diagnosis of depression. The improved fuzzy systems are used in ship steering systems (Chang et al. 2019). The type-2 fuzzy systems are used to green solid transportation problem (Das et al. 2018). In Sabzalian et al. (2019a), Mohammadzadeh and Kaynak (2019), Jhang et al. (2018), Mohammadzadeh and Zhang (2019) and Mohammadzadeh et al. (2019b) the GT2FSs are used in forecasting and control problems. GT2FSs are used in fault detection and time-series prediction (Boumella et al. 2012; Shabanian and Montazeri 2011). Many learning techniques have been suggested to optimize the type-2 fuzzy systems such as bee colony optimization (Zhang et al. 2019), particle swarm optimization (Boumella et al. 2012), among many others. However, the stable optimization of GT2FSs has been rarely studied. In this paper, the proposed GT2FSs are learned on basis of the tuning laws that are extracted through the robustness analysis.
Based on the aforementioned discussion and motivations, in this study a novel fault-tolerant control scheme is presented. The main innovations of this study are:
-
1.
Unlike the most studies, in this paper dynamic model of IM is considered to be unknown and also it is supposed the dynamics of IM to be disturbed by main faults such as perturbation in the rotor resistance and suddenly changes of load torque.
-
2.
In addition to the dynamic uncertainties and abrupt faults, the effect of measurement errors is also considered.
-
3.
A GT2FS is presented to cope with the uncertainties.
-
4.
The robustness of the suggested control approach is analyzed and a novel compensator is developed to insure the stability and robustness.
The remain structure of this study is as follows. The dynamics of IM is described in Sect. 2. The proposed GT2FS is illustrated in Sect. 3. The control signals and stability analysis are given in Sect. 4. Simulations are presented in Sect. 5, and the conclusion is summarized in Sect. 6.

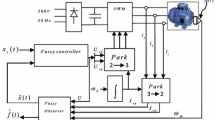
The general view on the suggested controller
2 Problem formulation
The mathematical dynamics of the IM are given as:
where the subscripts q, d, r and s refer to quadrature component, direct component, rotor and stator, respectively. \(\phi \), V and i, are the flux, voltage and current, respectively. \(\omega \) represents the rotor speed and \({\omega _\mathrm{s}}\) is frequency of stator angular. \({T _\mathrm{r}}\) is the load torque and it is considered to be unknown. The other parameters are defined as follows:
where J express moment of inertia, the number of pole pairs is represented by \(n_\mathrm{p}\) , \({L_\mathrm{r}}/{L_\mathrm{s}}\) is the rotor/stator inductances, \({R_\mathrm{r}}/{R_\mathrm{s}}\) is the rotor/stator resistance and \(M_\mathrm{sr}\) represents the mutual inductance.
The dynamics of IM in (1) are rewritten as follows:

where


By using the suggested GT2FS, the dynamics of IM in (3) are online estimated as follows:
where \({{{\hat{f}}}_i},\,i = 1,\ldots ,4\) are the suggested GT2GSs and  . \({{\hat{f}}_1}\), \({{\hat{f}}_2}\), \({{\hat{f}}_3}\) and \({{\hat{f}}_4}\) are the estimation of \({f_1}\left( {{\underline{y}} } \right) \), \({f_2}\left( {{\underline{y}} } \right) \), \({f_3}\left( {{\underline{y}} } \right) \) and \({f_4}\left( {{\underline{y}} } \right) \), respectively. A general view on the proposed control scheme shown in Fig. 1.
. \({{\hat{f}}_1}\), \({{\hat{f}}_2}\), \({{\hat{f}}_3}\) and \({{\hat{f}}_4}\) are the estimation of \({f_1}\left( {{\underline{y}} } \right) \), \({f_2}\left( {{\underline{y}} } \right) \), \({f_3}\left( {{\underline{y}} } \right) \) and \({f_4}\left( {{\underline{y}} } \right) \), respectively. A general view on the proposed control scheme shown in Fig. 1.

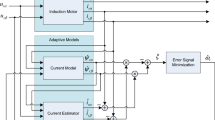
The structure of the generalized type-2 fuzzy system

The proposed non-singleton fuzzification
3 Suggested fuzzy system
In this section, the suggested GT2FS is explained. The suggested structure is displayed in Fig. 2. Consider the ith GT2FS, the details are described in below.
-
1.
The estimated states \({{{\hat{y}}}_k},\,k = 1,\ldots ,4\) are the inputs of GT2FS \({\hat{f}}_i\).
-
2.
Consider the nth membership function (MF) for the kth input as \({\tilde{A}}_k^n\); by conventional singleton fuzzification, the upper membership and the lower membership of \({\tilde{A}}_k^n\) at the horizontal slice level \(\alpha \) are computed as follows:
$$\begin{aligned} {\bar{\mu }} _{k|\alpha }^n= & {} \exp \left( { - \frac{{{{\left( {{{{\hat{y}}}_k} - {c_{{\tilde{A}}_k^n}}} \right) }^2}}}{{{\bar{\sigma }} _{{\tilde{A}}_{k|\alpha }^n}^2}}} \right) \nonumber \\ {\underline{\mu }} _{k|\alpha }^n= & {} \exp \left( { - \frac{{{{\left( {{{{\hat{y}}}_k} - {c_{{\tilde{A}}_k^n}}} \right) }^2}}}{{{\underline{\sigma }} _{{\tilde{A}}_{k|\alpha }^n}^2}}} \right) \end{aligned}$$(7)where \({{c_{{\tilde{A}}_k^n}}}\), \({{\bar{\sigma }} _{{\tilde{A}}_{k|\alpha }^n}}\) and \({{\underline{\sigma }} _{{\tilde{A}}_{k|\alpha }^n}}\), express the center, upper standard division and lower standard division of the Gaussian MF \({\tilde{A}}_{k|\alpha }^n\), respectively. \({{{{\hat{y}}}_k}}\) is the \(k-th\) input. \({\bar{\mu }} _{k|\alpha }^n\) and \({\underline{\mu }} _{k|\alpha }^n\) are the upper ad lower membership of \({\tilde{A}}_k^n\). By the proposed non-singleton fuzzfication, the upper membership and the lower membership of \({\tilde{A}}_k^n\) at the horizontal slice level \(\alpha \) are computed as follows:
$$\begin{aligned} \begin{array}{*{20}{l}} {\bar{\mu }_{k|\alpha }^n = \exp \left( { - \frac{{{{\left( {\hat{\bar{y}}_k^n - {c_{\tilde{A}_k^n}}} \right) }^2}}}{{\bar{\sigma }_{\tilde{A}_{k|\alpha }^n}^2}}} \right) }\\ {\underline{\mu }_{k|\alpha }^n = \exp \left( { - \frac{{{{\left( {\underline{\hat{y}} _k^n - {c_{\tilde{A}_k^n}}} \right) }^2}}}{{\underline{\sigma }_{\tilde{A}_{k|\alpha }^n}^2}}} \right) } \end{array} \end{aligned}$$(8)where \({\hat{{\bar{y}}}_k^n}\) and \({\underline{{\hat{y}}} _k^n}\) are computed as (see Fig. 3):
$$\begin{aligned} \hat{{\bar{y}}}_k^n= & {} \frac{{\sigma _{{B_k}}^2{c_{{\tilde{A}}_i^j}} + {\bar{\sigma }} _{{\tilde{A}}_{k|\alpha }^n}^2{{{\hat{y}}}_k}}}{{\sigma _{{B_k}}^2{c_{{\tilde{A}}_i^j}} + {\bar{\sigma }} _{{\tilde{A}}_{k|\alpha }^n}^2{{{\hat{y}}}_k}}} \end{aligned}$$(9)$$\begin{aligned} \underline{{\hat{y}}} _k^n{}= & {} \frac{{\sigma _{{B_k}}^2{c_{{\tilde{A}}_i^j}} + {\underline{\sigma }} _{\tilde{A}_{k|\alpha }^n}^2{{{\hat{y}}}_k}}}{{\sigma _{{B_k}}^2{c_{\tilde{A}_i^j}} + {\underline{\sigma }} _{{\tilde{A}}_{k|\alpha }^n}^2{{{\hat{y}}}_k}}} \end{aligned}$$(10)where \({\sigma _{{B_k}}}\) is a parameter in the membership function \({B_k}\) for kth input. The membership of \({B_k}\) is obtained as:
$$\begin{aligned} {\mu _{{B_k}}} = \left[ {1 + \frac{{{{\left( {y - {{{\hat{y}}}_k}} \right) }^2}}}{{\sigma _{{B_k}}^2}}} \right] \exp \left[ { - \frac{{{{\left( {y - {{{\hat{y}}}_k}} \right) }^2}}}{{\sigma _{{B_k}}^2}}} \right] \end{aligned}$$(11) -
3.
The rule firing are obtained as follows:
$$\begin{aligned} {{{\bar{\psi }} }_{n|\alpha }}= & {} {\bar{\mu }} _{1|\alpha }^n \times \cdots \times {\bar{\mu }} _{4|\alpha }^n\nonumber \\ {{\underline{\psi }} _{n|\alpha }}= & {} {\underline{\mu }} _{1|\alpha }^n \times \cdots \times {\underline{\mu }} _{4|\alpha }^n \end{aligned}$$(12)where \({{{\bar{\psi }} }_{n|\alpha }}\) and \({{\underline{\psi }} _{n|\alpha }}\) represent upper rule firing and lower rule firing of nth rule at level \(\alpha \)-cut.
-
4.
On the basis of the Nie-Tan type-reduction (Fekih 2008), one has:
$$\begin{aligned} {f_i} = {{\sum \limits _{j = 1}^{{N_\alpha }} {{\alpha _j}\,\theta _i^T{\xi _{i|{\alpha _j}}}} } \big / {\sum \limits _{j = 1}^{{N_\alpha }} {{\alpha _j}} }} \end{aligned}$$(13)$$\begin{aligned} \begin{array}{l} {\xi _{i|{\alpha _j}}} = \frac{1}{{\sum \nolimits _{n = 1}^{{N_\mathrm{r}}} {{{\bar{\psi }}_{n|{\alpha _j}}} + {{\underline{\psi }}_{n|{\alpha _j}}}} }}\\ {\left[ {{{\bar{\psi }}_{1|{\alpha _j}}} + {{\underline{\psi }}_{1|{\alpha _j}}},\ldots ,{{\bar{\psi }}_{{N_\mathrm{r}}|{\alpha _j}}} + {{\underline{\psi }}_{{N_\mathrm{r}}|{\alpha _j}}}} \right] ^\mathrm{T}} \end{array} \end{aligned}$$(14)where \({\hat{f}}_i\) is the output, \({{N_\mathrm{r}}}\) represents the rule numbers, \({{N_\alpha }}\) is the number of \(\alpha \)-cuts and \({\theta _i}\) is the vector of the consequent parameters. \({f_i}\) can be rewritten as follows:
$$\begin{aligned} {f_i} = \,\theta _i^T{\zeta _i} \end{aligned}$$(15)where
$$\begin{aligned} {\zeta _i} = {{\sum \limits _{j = 1}^{{N_\alpha }} {{\xi _{i|{\alpha _j}}}} } \big / {\sum \limits _{j = 1}^{{N_\alpha }} {{\alpha _j}} }} \end{aligned}$$(16)
4 Main results
The main outcomes of the study are given in the following theorem.
Theorem 1
The system (3) is stable, asymptotically, if the controllers and the tuning rules of the fuzzy systems are designed as follows:
where \(k_1\) and \(k_2\) are constants with positive values and the variables \({\chi _i}\), \({z_i}\), \(i=1,2\) are defined as follows:
where  , \(i=1,\ldots ,4\) are proposed fuzzy system, \({{ r}_1}\) and \({{ r}_2}\) are the reference signals, \({\lambda _1}\) and \({\lambda _2}\) are constant variables with the positive values, \(\delta \) is small positive constant, \({{\hat{e}}_i}\) and \({{\tilde{e}}_i},\,i = 1,\ldots ,4\) are defined as \({{\hat{e}}_i} = {{\hat{y}}_i} - {r_i},\,\,{{\tilde{e}}_i} = {y_i} - {{\hat{y}}_i}\), \({{{\bar{\varepsilon }} }_i},\,i = 1,\ldots ,4\) are the upper bounds of \({{ \varepsilon }_i}\) where are defined as follows:
, \(i=1,\ldots ,4\) are proposed fuzzy system, \({{ r}_1}\) and \({{ r}_2}\) are the reference signals, \({\lambda _1}\) and \({\lambda _2}\) are constant variables with the positive values, \(\delta \) is small positive constant, \({{\hat{e}}_i}\) and \({{\tilde{e}}_i},\,i = 1,\ldots ,4\) are defined as \({{\hat{e}}_i} = {{\hat{y}}_i} - {r_i},\,\,{{\tilde{e}}_i} = {y_i} - {{\hat{y}}_i}\), \({{{\bar{\varepsilon }} }_i},\,i = 1,\ldots ,4\) are the upper bounds of \({{ \varepsilon }_i}\) where are defined as follows:
where  are the proposed type-2 fuzzy system with optimal parameters \({ \theta _i^ * }\). Also \({{\tilde{\theta }} _i}\), \(i=1,\ldots ,4\) are defined as:
are the proposed type-2 fuzzy system with optimal parameters \({ \theta _i^ * }\). Also \({{\tilde{\theta }} _i}\), \(i=1,\ldots ,4\) are defined as:
Proof
Substituting (20) into (6), yields:
The dynamics of \({{{\tilde{e}}}_1}\), \({{{\tilde{e}}}_2}\), \({{{\tilde{e}}}_3}\) and \({{{\tilde{e}}}_4}\) are obtained as follows:
By substituting (21) into equation (24), one has:
Time derivative of \({\chi _2}\) and \({\chi _1}\) in (19), are obtained as follows:
From (17) and (26), the dynamics of \(\chi _1\) and \(\chi _2\) can be written as follows:
To prove the closed-loop stability, the following Lyapunov function is considered:
where \(\eta \) is the tuning rate. By taking time derivative of (28), one has:
Substituting \(\dot{{\hat{e}}}_1\) and \(\dot{{\hat{e}}}_2\) from (23), \(\dot{{\tilde{e}}}_i\) \(i=1,\ldots ,4\) from (25) and \({{\dot{\chi }}} _1\) and \({{\dot{\chi }}} _2\) from (27), yields:
Equation (30) can be rewritten as follows:
Substituting the adaptation laws of \( \theta _i, \, i=3,4\) form (18) into (31), results in:
From (32), one has:
From (33) and considering the fact that:

Scenario 1: the tracking performance of rotor speed
One has:
From (35), the inequality (33), becomes:
Since the \({{\hat{e}}_1^{}}\), \({{\hat{e}}_2^{}}\), \(\chi _1^{}\) and \(\chi _2^{}\) are limited, then \({{\ddot{V}}}\) is bounded and then on the basis Barbalat’s lemma the asymptotic stability is proved and the proof is completed. \(\square \)
5 Simulation
This section presents the examination of the performance of the designed control scheme on an induction motor by 1.5 kW cage rotor and (220–380 V) power supply. The parameters of simulation are given in Tables 1 and 2. The performance of the suggested controller is evaluated in three scenarios, and finally a comparison with other popular control techniques is presented.

Scenario 1: the tracking performance of rotor flux

Scenario 1: the trajectory of the tracking error (rotor speed)

Scenario 1: the trajectory of the tracking error (rotor flux)

Scenario 1: the stator current (direct component)
Scenario 1 In the first scenario, it is assumed that there is no fault but the dynamics of IM is unknown. The trajectory of output \(y_1\) (rotor speed) is shown in Fig. 4 and the trajectory of the second output \(y_2\) (rotor flux) is depicted in Fig. 5. The tracking errors \(e_1\) and \(e_2\) are shown in Figs. 6 and 7, respectively. The trajectories of the direct component and the quadrature component of the stator current are given in Figs. 8 and 9, respectively. The direct component and the quadrature component of the control signals are provided in Figs. 10 and 11. One can see that the trajectories of \(y_1\) and \(y_2\) are well reached to the reference values in a finite time.

Scenario 1: the stator current (quadrature component)

Scenario 1: the control signal (\(V_\mathrm{sd}\))

Scenario 1: the control signal (\(V_\mathrm{sq}\))
Scenario 2 In second scenario in addition to the fact that dynamics of IM is unknown, the main faults, such as perturbation in the rotor resistance and sudden changes of load torque, are considered as below. The perturbation of the rotor resistance is considered as \({R_\mathrm{r}} = {R_\mathrm{rN}}\left( {2 - \exp \left( { - 1.5t} \right) } \right) \), where \(R_\mathrm{rN}\) represents the nominal case of \(R_\mathrm{r}\) and the load torque is assumed to be suddenly changed from (5 N\(_\mathrm{m}\)) at \(t=3\) s as depicted in Fig. 12. The rotor speed \(y_1\) is given in Fig. 13, and the trajectory of the second output \(y_2\) (rotor flux) is depicted in Fig. 14. The tracking errors \(e_1\) and \(e_2\) are shown in Figs. 15 and 16, respectively. The trajectories of the stator current (direct component and the quadrature component) are given in Figs. 17 and 18. The direct/quadrature component of input voltage is displayed in Fig. 19/Fig. 20. One can see that the proposed controller could overcome the changes of the load torque, and variation of rotor resistance and the trajectories of rotor speed \(y_1\) and rotor flux \(y_2\) well track the desired reference under faulty conditions.

Scenario 2: the variation of the load torque

Scenario 2: the tracking performance of rotor speed

Scenario 2: the tracking performance of rotor flux

Scenario 2: the trajectory of the tracking error of the rotor speed
Scenario 3 In third scenario in addition to the unknown dynamics of IM and presence of the main faults such as considered in Scenario 2, the measurement errors are also considered. The measurement errors are considered to white noise that are added to the output signals. The results are given in Table 3. One can see that the proposed controller using GT2FS and non-singleton fuzzification could better overcome the measurement errors, changes of the load torque and variation of rotor resistance, in contrast to T1FS, IT2FS and singleton fuzzification.

Scenario 2: the trajectory of the tracking error (rotor flux)

Scenario 2: the stator current (direct component)

Scenario 2: the stator current (quadrature component)

Scenario 2: the control signal (\(V_\mathrm{sd}\))

Scenario 2: the control signal (\(V_\mathrm{sq}\))
Comparison To demonstrate the capability of the suggested controller, a comparison with the other control techniques is provided. The control methods such as the fault tolerant control method (FTAC) (Fekih 2008), field oriented control approach (FOC) (Fekih 2008), the adaptive sliding mode controller (ASMC) (Dong et al. 2016) and type-2 fuzzy sliding mode control technique (T2FSC) (Masumpoor and Khanesar 2015) are considered. The root-mean-square errors (RMSEs) of different control approaches are provided in Table 4. One can see that suggested method performance is more better than the other techniques. It must be taken to account that in contrary to the other approaches, the mathematical dynamics model of the IM is considered to be fully unknown in the suggested control method.
6 Conclusion
In this paper, a new robust control approach is proposed for the control of induction motors (IM) based on the generalized type-2 fuzzy system. The dynamics of IM is unknown and is disturbed by the changes in rotor resistance and load torque. A new robust compensator is proposed to cope with approximation errors and disturbances. The type-2 fuzzy systems are optimized through the adaptation laws that are derived from Lyapunov robustness analysis. The simulations exhibit that the suggested controller has good and desired performance. Also the comparison with some other control techniques verify the strong effectiveness of the suggested control method. Furthermore, the comparison of the tracking performance of the suggested control system with other kind of fuzzy systems and fuzzification methods demonstrates that the suggested fuzzy control system has better capability in the presence of measurement errors, abrupt faults and unknown time-varying dynamics. The main limitation is that the actuator failures have not been considered. For our future studies, this problem in practical application is taken to account. .
Availability of data and material
There is no data and material.
References
Ali ES (2015) Speed control of induction motor supplied by wind turbine via imperialist competitive algorithm. Energy 89:593–600
Ammar A, Talbi B, Ameid T, Azzoug Y, Kerrache A (2019) Predictive direct torque control with reduced ripples for induction motor drive based on t–s fuzzy speed controller. Asian J Control. https://doi.org/10.1002/asjc.2148
Boumella N, Djouani K, Boulemden M (2012) A robust interval type-2 TSK fuzzy logic system design based on chebyshev fitting. Int J Control Autom Syst 10(4):727–736
Chang W-J, Lin Y-H, Du J, Chang C-M (2019) Fuzzy control with pole assignment and variance constraints for continuous-time perturbed Takagi–Sugeno fuzzy models: application to ship steering systems. Int J Control Autom Syst 17(10):2677–2692
Castillo O, Atanassov K (2019) Comments on fuzzy sets, interval type-2 fuzzy sets, general type-2 fuzzy sets and intuitionistic fuzzy sets. In: Recent advances in intuitionistic fuzzy logic systems. Springer, Berlin, pp 35–43
Castillo O, Melin P, Valdez F, Soria J, Ontiveros-Robles E, Peraza C, Ochoa P (2019) Shadowed type-2 fuzzy systems for dynamic parameter adaptation in harmony search and differential evolution algorithms. Algorithms 12(1):17
Das A, Bera UK, Maiti M (2018) Defuzzification and application of trapezoidal type-2 fuzzy variables to green solid transportation problem. Soft Comput 22(7):2275–2297
Deng W, Yao R, Zhao H, Yang X, Li G (2019) A novel intelligent diagnosis method using optimal LS-SVM with improved PSO algorithm. Soft Comput 23(7):2445–2462
Dong C, Brandstetter P, Vo HH, Tran TC, Vo DH (2016) Adaptive sliding mode controller for induction motor. In: International conference on advanced engineering theory and applications. Springer, Berlin, pp 543–553
Farah N, Talib MHN, Shah NSM, Abdullah Q, Ibrahim Z, Lazi JBM, Jidin A (2019) A novel self-tuning fuzzy logic controller based induction motor drive system: an experimental approach. IEEE Access 7:68172–68184
Fekih A (2008) Effective fault tolerant control design for nonlinear systems: application to a class of motor control system. IET Control Theory Appl 2(9):762–772
Gopal BV, Shivakumar E (2019) Design and simulation of neuro-fuzzy controller for indirect vector-controlled induction motor drive. In: Nagabhushan P, Guru D, Shekar B, Kumar Y (eds) Data analytics and learning. Springer, Berlin, pp 155–167
Guazzelli PRU, de Andrade Pereira WC, de Oliveira CMR, de Castro AG, de Aguiar ML (2018) Weighting factors optimization of predictive torque control of induction motor by multiobjective genetic algorithm. IEEE Trans Power Electron 34(7):6628–6638
Guedes JJ, Castoldi MF, Goedtel A, Agulhari CM, Sanches DS (2019) Differential evolution applied to line-connected induction motors stator fault identification. Soft Comput 23(21):11217–11226
Jana DK, Pramanik S, Sahoo P, Mukherjee A (2019) Interval type-2 fuzzy logic and its application to occupational safety risk performance in industries. Soft Comput 23(2):557–567
Jhang J-Y, Lin C-J, Lin C-T, Young K-Y (2018) Navigation control of mobile robots using an interval type-2 fuzzy controller based on dynamic-group particle swarm optimization. Int J Control Autom Syst 16(5):2446–2457
Kalat AA (2019) A robust direct adaptive fuzzy control for a class of uncertain nonlinear mimo systems. Soft Comput 23(19):9747–9759
Kali Y, Rodas J, Saad M, Gregor R, Benjielloun K, Doval-Gandoy J, Goodwin G (2018) Speed control of a five-phase induction motor drive using modified super-twisting algorithm. In: International symposium on power electronics, electrical drives, automation and motion (SPEEDAM). IEEE, pp 938–943
Kubota H, Matsuse K (1994) Speed sensorless field-oriented control of induction motor with rotor resistance adaptation. IEEE Trans Ind Appl 30(5):1219–1224
Lascu C, Jafarzadeh S, Fadali MS, Blaabjerg F (2016) Direct torque control with feedback linearization for induction motor drives. IEEE Trans Power Electron 32(3):2072–2080
Lim CS, Levi E, Jones M, Rahim NA, Hew WP (2013) FCS-MPC-based current control of a five-phase induction motor and its comparison with PI-PWM control. IEEE Trans Ind Electron 61(1):149–163
Lopes TD, Goedtel A, Palácios RHC, Godoy WF, de Souza RM (2017) Bearing fault identification of three-phase induction motors bases on two current sensor strategy. Soft Comput 21(22):6673–6685
Masumpoor S, Khanesar MA et al (2015) Adaptive sliding-mode type-2 neuro-fuzzy control of an induction motor. Expert Syst Appl 42(19):6635–6647
Melin P, Ontiveros-Robles E, Gonzalez CI, Castro JR, Castillo O (2019) An approach for parameterized shadowed type-2 fuzzy membership functions applied in control applications. Soft Comput 23(11):3887–3901
Mohammadzadeh A, Kaynak O (2019) A novel general type-2 fuzzy controller for fractional-order multi-agent systems under unknown time-varying topology. J Frankl Inst 356(10):5151–5171
Mohammadzadeh A, Zhang W (2019) Dynamic programming strategy based on a type-2 fuzzy wavelet neural network. Nonlinear Dyn 95(2):1661–1672
Mohammadzadeh A, Ghaemi S, Kaynak O et al (2019a) Robust predictive synchronization of uncertain fractional-order time-delayed chaotic systems. Soft Comput 23(16):6883–6898
Mohammadzadeh A, Sabzalian MH, Zhang W (2019b) An interval type-3 fuzzy system and a new online fractional-order learning algorithm: theory and practice. IEEE Trans Fuzzy Syst 28:1940–1950
Ontiveros-Robles E, Melin P (2020) Toward a development of general type-2 fuzzy classifiers applied in diagnosis problems through embedded type-1 fuzzy classifiers. Soft Comput 24(1):83–99
Ponce P, Ponce H, Molina A (2018) Doubly fed induction generator (DFIG) wind turbine controlled by artificial organic networks. Soft Comput 22(9):2867–2879
Regaya CB, Farhani F, Zaafouri A, Chaari A (2018) A novel adaptive control method for induction motor based on backstepping approach using dSpace DS 1104 control board. Mech Syst Signal Process 100:466–481
Sabzalian MH, Mohammadzadeh A, Lin S, Zhang W (2019a) Robust fuzzy control for fractional-order systems with estimated fraction-order. Nonlinear Dyn 98(3):2375–2385
Sabzalian MH, Mohammadzadeh A, Lin S, Zhang W (2019b) New approach to control the induction motors based on immersion and invariance technique. IET Control Theory Appl 13:1466–1472
Shabanian M, Montazeri M (2011) A neuro-fuzzy online fault detection and diagnosis algorithm for nonlinear and dynamic systems. Int J Control Autom Syst 9(4):665
Thangaraj R, Chelliah TR, Pant M, Abraham A, Grosan C (2011) Optimal gain tuning of pi speed controller in induction motor drives using particle swarm optimization. Log J IGPL 19(2):343–356
Uddin MN, Radwan TS, Rahman MA (2002) Performances of fuzzy-logic-based indirect vector control for induction motor drive. IEEE Trans Ind Appl 38(5):1219–1225
Ustun SV, Demirtas M (2008) Optimal tuning of pi coefficients by using fuzzy-genetic for v/f controlled induction motor. Expert Syst Appl 34(4):2714–2720
Xu D, Song X, Jiang B, Yang W, Yan W (2019) Data-driven sliding mode control for mimo systems and its application on linear induction motors. Int J Control Autom Syst 17(7):1717–1725
Xu D, Huang J, Su X, Shi P (2019) Adaptive command-filtered fuzzy backstepping control for linear induction motor with unknown end effect. Inf Sci 477:118–131
Yu X, Dunnigan MW, Williams BW (2001) Comparative study of sliding mode speed and position control of a vector-controlled induction machine. Trans Inst Measur Control 23(2):83–101
Zarandi MF, Soltanzadeh S, Mohammadi A, Castillo O (2019) Designing a general type-2 fuzzy expert system for diagnosis of depression. Appl Soft Comput 80:329–341
Zina HB, Allouche M, Souissi M, Chaabane M, Chrifi-Alaoui L, Bouattour M (2018) A Takagi–Sugeno fuzzy control of induction motor drive: experimental results. Int J Autom Control 12(1):44–61
Zhang Y, Yang H (2015) Two-vector-based model predictive torque control without weighting factors for induction motor drives. IEEE Trans Power Electron 31(2):1381–1390
Zhang Y, Yang H, Xia B (2016) Model-predictive control of induction motor drives: torque control versus flux control. IEEE Trans Ind Appl 52(5):4050–4060
Zhao Z, Yu J, Zhao L, Yu H, Lin C (2018) Adaptive fuzzy control for induction motors stochastic nonlinear systems with input saturation based on command filtering. Inf Sci 463:186–195
Zhang Z, Wang T, Chen Y, Lan J (2019) Design of type-2 fuzzy logic systems based on improved ant colony optimization. Int J Control Autom Syst 17(2):536–544
Zhao T, Li P, Cao J (2019) Self-organising interval type-2 fuzzy neural network with asymmetric membership functions and its application. Soft Comput 23(16):7215–7228
Funding
There is no funding source for this paper.
Author information
Authors and Affiliations
Contributions
Akram Sedaghati contributed to Writing—original draft; formal analysis, and Naser Pariz, Mehdi Siahi and Roohollah Barzamini contributed to formal analysis, writing—review and investigation.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Code availability
There is no code.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Sedaghati, A., Pariz, N., Siahi, M. et al. A new adaptive non-singleton general type-2 fuzzy control of induction motors subject to unknown time-varying dynamics and unknown load torque. Soft Comput 25, 5895–5907 (2021). https://doi.org/10.1007/s00500-021-05582-y
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00500-021-05582-y